
高通量工程试验堆临界装置仪控系统改造
2020-07-28 02:38江易蔚何佳谦
自动化与仪表 2020年7期
王 雷,江易蔚,蒋 波,李 普,何佳谦
(中国核动力研究设计院,成都610005)
高通量工程试验堆临界装置HFETRC(high flux engineering test reactor critical assembly)承担高通量工程试验堆HFETR 零功率物理试验研究的任务,自2007年完成元件低浓化试验后长期处于封存状态。
目前,某在建的试验堆堆芯、孔道布置方案与HFETR 均不相同,采用的燃料组件、控制棒组件等堆芯部件与HFETR 也有所不同。为检验该新建试验堆堆芯核设计计算程序的计算精度和可靠性,需要在HFETRC 上开展新建试验堆临界物理试验。
根据新建试验堆临界物理试验要求,在恢复HFETRC 功能的前提下,需要对临界装置进行相应改造。
1 HFETRC 仪控系统现状
HFETRC 仪控系统根据HFETR 临界试验条件进行建造,系统整体仿照高通量堆仪控系统进行设计,包括核测系统、保护系统、信号报警系统、棒控系统和辐射监测系统。
1)核测系统 利用核探测器对临界装置中子注量进行监测,并设置保护阈值,将保护信号提供给保护系统[1];2)保护系统 将核测系统各个通道提供的保护信号通过保护逻辑进行整合,触发保护动作并提供报警信号输入;3)信号报警系统 将设备的工作状态通过光字牌并结合声光报警进行显示[2];4)棒控系统 执行操纵人员控制指令,通过改变控制棒插入堆芯的位置控制反应性,并在紧急情况下执行安全棒落棒等操作,确保反应堆运行安全[3];5)辐射监测系统 相对独立,用于检测试验环境辐射剂量,确保人员安全。
由于临界装置长期封存,在前期检查过程中发现临界装置仪控系统插件损坏较为严重,且原有仪控系统并不满足新建试验堆临界物理试验操作要求,因此在恢复原有系统功能的前提下对临界装置进行了相关改造。改造内容包括在原有系统基础上对控制逻辑的改造、根据试验要求需要新增的改造及维修改造,涉及棒控系统、掉棒时间测量和外电源失电保护等模块。
2 控制逻辑改造
控制逻辑改造主要针对棒控系统进行改造。HFETRC 棒控系统由低压电源、X 环节、 安全联锁、控制条件、棒控逻辑、电机驱动等插件组成。棒控系统组成如1 所示。
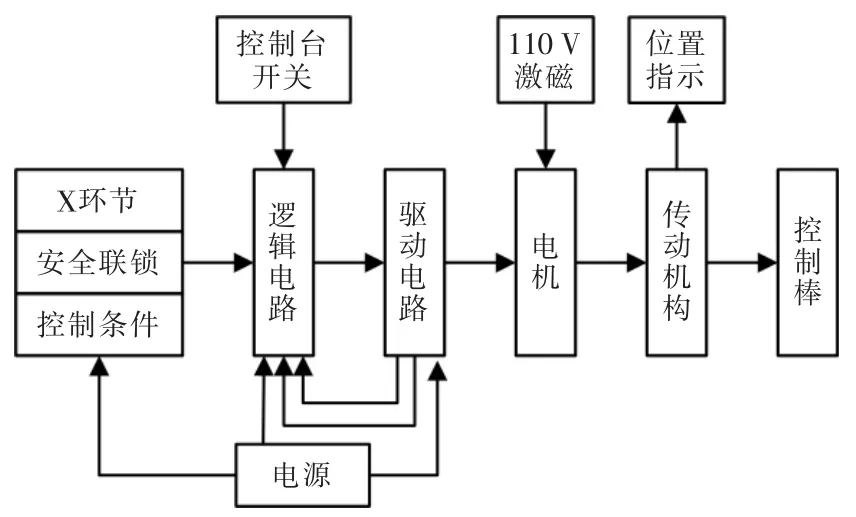
图1 棒控系统组成Fig.1 Composition of rod control system
X 环节接收所有棒到底信号,将触点信号输送到保护机柜,作为保护投入的必要条件;
安全联锁安全连锁逻辑条件包括只有保护投入安全棒才能正常提棒,只有安全棒全部到顶手动棒才能提棒;
控制条件励磁监督、位置指示器正常作为提棒动作的必要条件;
逻辑电路接收各种控制条件和操作命令,进行逻辑组合,给出驱动电路的控制信号;
驱动电路接收逻辑电路信号控制电机方向和转速。
临界装置采用2 根安全棒进行临界监督,但新建试验堆设计有4 根安全棒,这将导致临界装置原有棒控系统控制逻辑无法满足此次临界试验要求。棒控系统安全棒和手动棒的主要区别在于,安全棒在紧急情况下,驱动机构中的电磁离合器会失电引起安全棒自由落体插入堆芯,使反应堆停闭,同时安全棒到顶作为手动棒提升条件,能够防止手动棒提升过程中导致瞬发临界事件的产生。虽然临界装置仅有2 根控制棒作为安全棒,但仍有另外4 根控制棒驱动机构中带有电磁离合器,因此要达到新建试验堆临界试验具备4 根安全棒的要求,仅需要对原有2 根带有电磁离合器的手动棒控制逻辑进行改造,将其控制逻辑改造为安全棒控制逻辑。
HFETRC 控制棒分为安全棒2 根、手动棒8 根、自动棒2 根(自动棒执行手动棒控制逻辑);新建试验堆临界试验所需控制棒为安全棒4 根、 手动棒6根、自动棒2 根。临界装置与临界试验控制棒的对比见表1。

表1 临界装置与临界试验控制棒的对比Tab.1 Comparison of control rods for critical device and critical test
根据HFETRC 控制棒原有布局,结合临界试验方案堆芯布置及现场驱动机构布置情况,选取原3SB、6SB 手动棒改造为3AB、6AB 安全棒。安全棒和手动棒的控制条件与安全联锁条件不同。将原3SB、6SB 手动棒改造为3AB、6AB 安全棒的前后控制条件及安全联锁条件的变化见表2。
临界装置控制棒棒控逻辑全部由逻辑电路来实现,为了实现控制棒逻辑变化,同时减小改造范围,采取对电路局部调整的方式实现对控制棒控制方式的改造。
在棒控机柜3KG 安全联锁电路上,断开1AB和2AB 到顶信号送至3SB 棒控逻辑电路输入端的信号,并增加一路保护投入信号送至3SB 棒控逻辑输入端 (6SB 的电路调整在棒控机柜4KG 上完成,操作同上)。调整后,可实现安全棒提升条件逻辑的变化,其电路修改如图2 所示。

表2 棒控系统改造前后逻辑条件的对比Tab.2 Comparison of logic conditions before and after rod control system modification
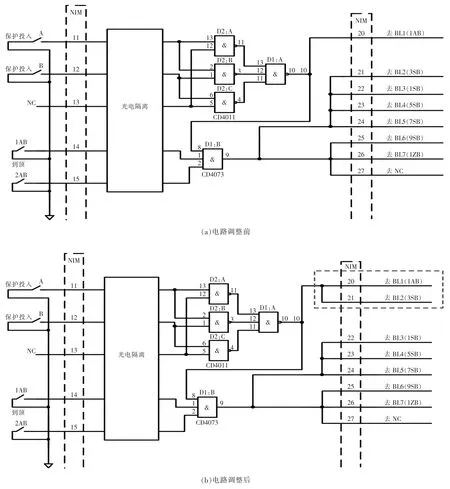
图2 安全联锁电路调整前后的对比Fig.2 Comparison of safety interlock circuit before and after adjustment
在3SB 棒控逻辑电路中,引出2 对控制棒到顶常开触点信号,分别至机柜3KG 和机柜4KG 的安全联锁电路中。其中,一对触点信号与机柜3KG 上1AB 到顶常开触点信号串联接入,另一对触点信号与4KG 上1AB 到顶常开触点信号串联接入。
在6SB 棒控逻辑电路中,引出2 对控制棒到顶常开触点信号,分别至机柜3KG 和机柜4KG 的安全联锁电路中。其中,一对触点信号与机柜3KG 上2AB 到顶常开触点信号串联接入,另一对触点信号与4KG 上2AB 到顶常开触点信号串联接入。调整后,可实现手动棒提升控制逻辑的变化,其电路修改如图3 所示。
在操作台3SB 操作开关上,断开3SB 的手动下降输出触点,在操作台上慢停堆开关上引出一对慢停堆常开触点,接入棒控逻辑电路中原3SB 手动下降输入端,用慢停堆信号替代了原手动下降功能(6SB 电路调整操作同上),调整后可实现慢停堆驱动条件的变化。
电路调整后,在棒控测试机柜对棒控逻辑电路进行调速,将调整后的3SB、6SB 提升和下降棒速调整至20 mm/s,使其满足了安全棒提升和手动下降速度。自此,在不破坏原电路板结构的条件下,通过更改输入输出逻辑,实现3SB 和6SB 从手动棒到安全棒最小化和最优化的改造。
3 落棒时间测量改造
安全棒落棒时间是关系反应堆安全的重要参数。HFETRC 落棒时间测量系统运行时,所测时间为安全棒离顶信号(上行程开关动作)至安全棒到底信号(下行程开关动作)之间的时间。但是,由于临界装置为防止安全棒落棒时撞击底部发生反弹,在驱动装置底部设置有一定距离的缓冲段,从而将控制棒快速下降行程分为自由落体段与缓冲段。快速停堆时,安全棒在自由下落到缓冲段后,由伺服电机带动下插到底,由下行程开关来触发制动电路使电机停止。如果测量包括缓冲段在内的安全棒落棒时间,则落棒时间必然超出临界试验安全限值,且不具备参考意义。因此,在自由落体行程段末尾,新增加一个行程开关用于落棒计时,确保改造后的落棒时间测量仅测量安全棒自由落体段的时间。
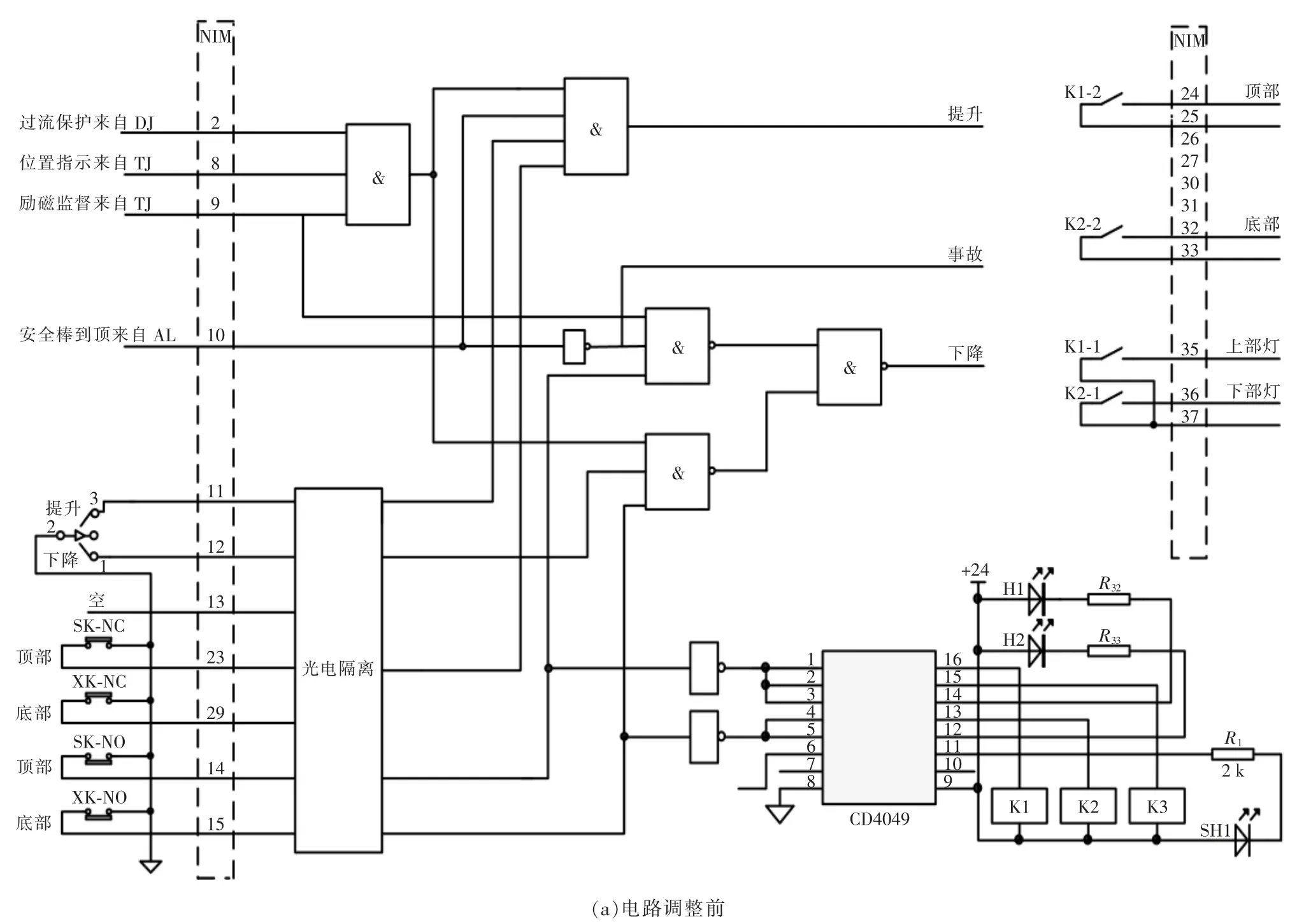
图3 手动棒棒控逻辑电路调整前后对比Fig.3 Before and after adjustment of manual control rod logic circuit
在驱动机构旁增加的落棒计时行程开关如图4所示。当控制棒下落到对应高度时,开关的通断状态改变,但不影响安全棒继续下落。其安装高度可调整,使对应落棒行程为800~950 mm。当新增落棒行程计时开关动作时,指示灯点亮,由此通过位置指示器观察落棒行程,新增行程开关动作点可通过前面板指示灯观测以及现场测量,落棒时间由时间测量装置指示。
临界装置的时间测量插件,只能测量装置上原有的限位开关状态变化作为时间终点的掉棒时间,为适应新的掉棒时间测量方法,需要对时间测量插件进行改造。时间测量插件的改进原理如图5 所示。
由图可见,在时间测量插件后面板上增加1 个选择开关,在插件前面板上增加1 个指示灯。在做落棒时间测量时,如选择开关向上拨到 “全程”位置,则计时终点为原下限位开关动作,此时插件显示全行程落棒时间;如选择开关向下拨到“快速”位置,则计时终点为新增行程开关动作,此时插件显示快速落棒时间。新增的指示灯只有在控制棒下落到新增行程开关对应位置后才点亮,以配合位置指示器监视新增行程开关所对应的控制棒位置。
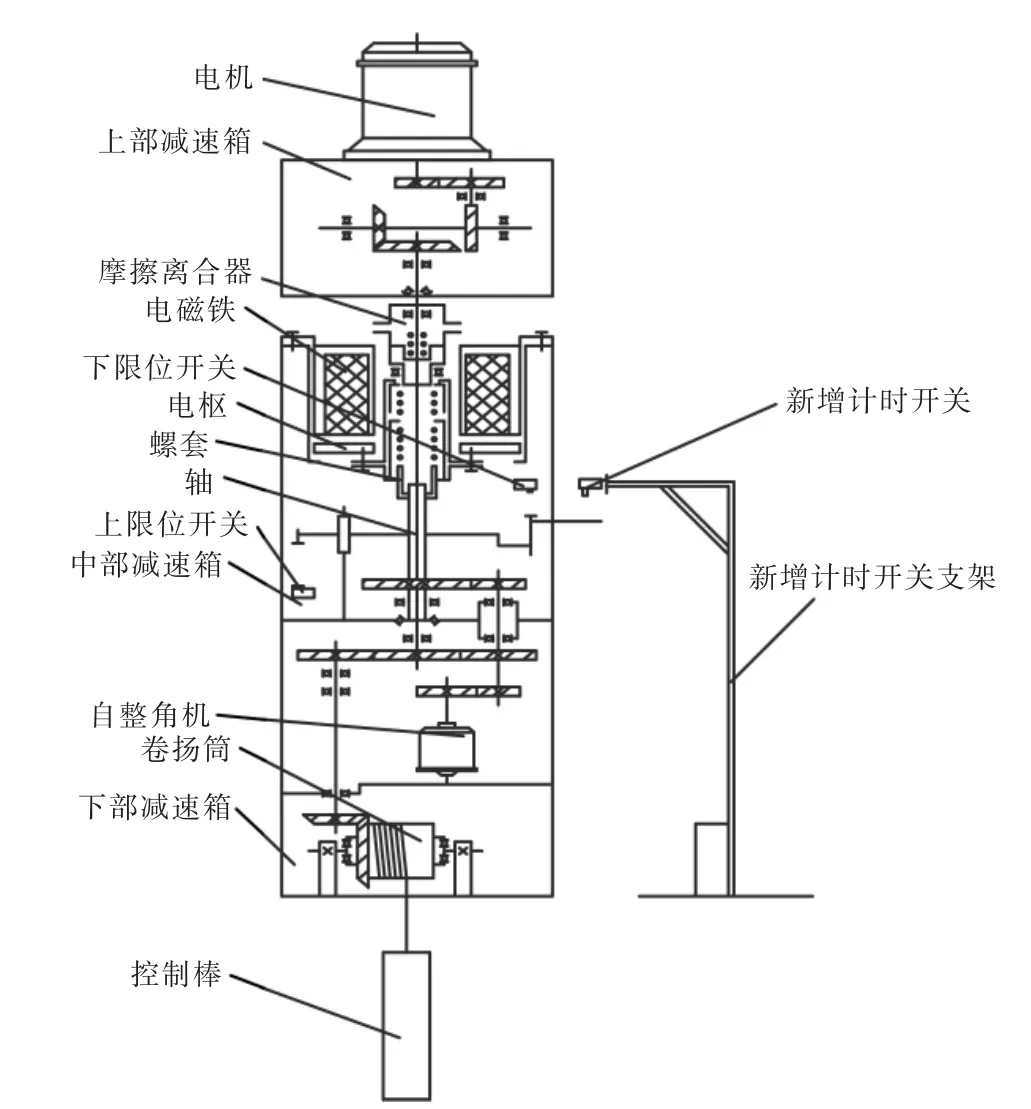
图4 新设限位开关示意图Fig.4 Diagrammatic sketch of the new limit switch

图5 时间测量插件改造Fig.5 Time measurement plug-in modification
图5 中“新增电路”框内为此次改造的内容:
1)当S3 选择开关置“1”位置时,该插件测量的全行程落棒时间,其测量原理与变更前相同;当下限位开关LX1 由常闭变为打开时,停止计时,计数器显示落棒时间。
2)当S3 选择开关置“2”位置时,该插件测量的为自由落体段落棒时间,LX2 为新增落棒计时行程开关。当LX2-1 由常闭状态变为打开时,停止计时,LX2-2 由常开变为常闭,H1 指示灯亮,计数器显示出快速落棒时间。
3)将被测试的安全棒提升到顶,慢速下插,当安全棒降到时间测量插件前面板指示灯亮时停止下插,在位置指示器上读出棒下插行程,该行程即为安全棒落棒测量时间所对应的落棒行程(该行程≥800 mm)。
4 外电源失电保护信号改造
发生断电事故时,反应堆通过UPS 供电,将会严重影响反应堆的运行安全,因而要求通过“外电源失电”保护信号实现立即停堆。经检查发现,原失电监督继电器供电接到了UPS 后,外电源失电,UPS对继电器正常供电,无法起到对外电失电的监督作用。而且,外电源失电原为黄牌警告报警信号,现需要修改为红牌停堆保护信号。
在外电源失电保护信号改造中,首先将失电监督继电器线圈供电转移到UPS 之前,采用外电源进行供电。当外电丢失后,机柜继续通过UPS 供电,但外电源监督继电器触点信号发生变化,触发保护系统停堆动作。HFETRC 供电系统原理如图6 所示。

图6 HFETRC 供电系统原理Fig.6 HFETRC power supply system schematic
HFETRC 报警系统安装在1KG 机柜,查看5KG端子接线图后可找到外电源失电监督继电器,接线去向为1KG-X3-9 和1KG-X3-10,验证了1KG-X3-9和1KG-X3-10 的2 根线为继电器输出到报警系统的触点信号。改造后,需要将继电器输出的触点信号连接至保护系统,由保护系统触发停堆并触发报警系统发出声光信号。经检查1KG 端子接线表,发现备用的保护系统信号接线端子X4-11 和X4-12,如图7 所示,将失电监督继电器输出的触点信号接到备用端子上,同时将该信号并联至2KG 相同位置,完成失电监督改造。经功能验证,改造后外电源失电保护动作正常。
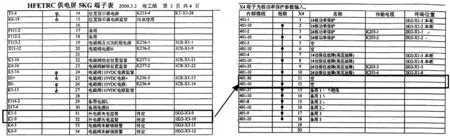
图7 HFETRC 报警信号和保护信号接线端子Fig.7 HFETRC alarm and protection signal terminals
5 结语
根据新建试验堆临界试验,对HFETRC 提出的改造要求,对HFETRC 棒控系统、掉棒时间测量插件和外电源失电保护监督进行了改造。改造在原有电路设计的基础上进行了小范围的电路调整,并进行了充分的电路分析,能够最大限度地保证改造的科学性和安全性。试验验证表明,改造内容安全可靠,保障了HFETRC 试验的顺利进行。
猜你喜欢
机械管理开发(2022年5期)2022-07-07
哈尔滨工业大学学报(2022年5期)2022-04-19
中国核电(2021年3期)2021-08-13
家庭影院技术(2021年3期)2021-05-21
核科学与工程(2021年2期)2021-05-18
哈尔滨商业大学学报(自然科学版)(2020年5期)2020-10-27
铁道通信信号(2020年5期)2020-09-21
铁道通信信号(2020年9期)2020-02-06
科技传播(2019年22期)2020-01-14
电子制作(2018年1期)2018-04-04
