
基于图像滤波与Hough变换的红外弱小目标检测
2020-07-28 06:32:26汪烈兵姜雄飞石春光李慧冲马晓龙
红外技术 2020年7期
汪烈兵,姜雄飞,石春光,李慧冲,马晓龙
(中国人民解放军66069 部队,河南 洛阳 471023)
0 引言
红外弱小目标检测是红外图像处理中的热点和难题。由于其在军事目标预警中的重要意义,受到了大量学者的广泛关注[1-3]。目标在经过长距离的传输后,能量显著衰减,一般仅显示为一个或几个像素点,缺乏目标的结构特征。再加上各种环境噪声的干扰,使得最终得到的红外图像信噪很低,给目标的准确识别带来了较大的挑战。
现有的弱小目标检测方法大体可分为两类。第一类是利用多帧累加得到背景图像、利用各帧图像与背景图像的差分来获取目标轨迹;第二类是采用数学变换、空间滤波、机器学习等方法来获取目标轨迹。第一类方法对于图像的信噪比要求较高,即通过图像预处理后再进行阈值分割就可以检测到目标。第二类方法的计算量较大,并且在没有足够先验信息的情况下,预处理得到的疑似目标多,会带来较高的误报率[4]。此外,大量文献讨论的弱小目标检测方法都针对信噪比约为3 的弱小目标[5-7],对于信噪比更低,甚至接近于1 的目标检测问题则少有讨论。当目标信噪比接近1时,利用单帧图像进行目标检测变得十分困难。本文首先利用最大中值滤波的方法对序列图像中的每一帧进行背景抑制,然后将滤波后的图像直接叠加,采用有灰度权重的Hough 变换进行目标检测。这种方法很好地利用了序列图像的信息,而且避免了传统Hough 变换直接对图像进行阈值分割造成灰度信息丢失的问题。实验结果表明该方法稳定、有效。
1 单帧图像的背景抑制
Suyog D.Deshpande 等人对于最大中值滤波法在红外弱小目标检测中的应用做了大量的研究工作[8]。相对于中值滤波法,最大中值滤波法在滤除孤立点的同时能更好地保护背景结构的边缘信息。弱小目标在空间上通常呈现高斯型分布,而背景结构则呈现不规则分布,这使得背景预测成为弱小目标检测的关键[9]。由于弱小目标在图像中是孤立点,最大中值滤波可以在滤除目标的同时保留背景结构特征,这样可以实现背景预测。然后用原始图像减去最大中值滤波的输出即可实现抑制背景、增强目标的作用。我们用阈值分割的方法判别目标可能出现的区域,对于潜在目标区使用均值滤波,反之则使用最小值滤波。
二维最大中值滤波被定义为:

图1 为滤波窗口大小为5×5 的最大中值滤波的算法示意图。在大多情况下目标很小,而且通常可以通过先验知识得到目标大小的估计值[10]。滤波窗口大小的选用以略大于目标为宜,这样可以更好的将目标看作孤立点滤除以达到背景预测的目的。
图2 为单帧图像背景抑制的效果示意图。背景预测图2(b)很好地保留了原始图像的背景结构,同时滤除了包括目标在内的一些孤立点。背景抑制图2(e)能很好地突出目标,但同时引入了背景干扰,从单帧图像中难以将目标与背景干扰区分开来。
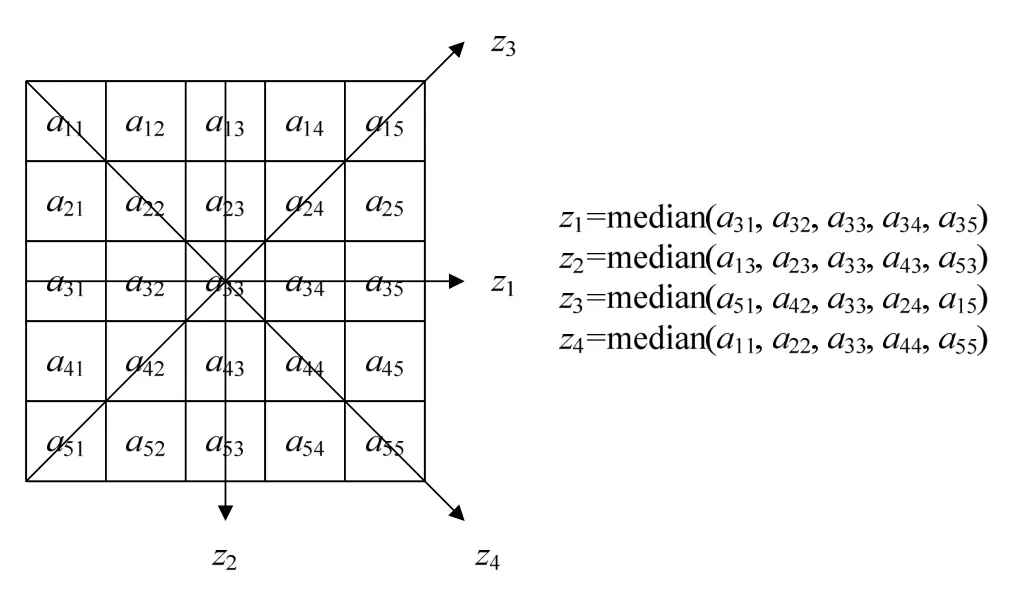
图1 最大中值滤波算法示意图Fig.1 The implementation of the Max-Median filtering
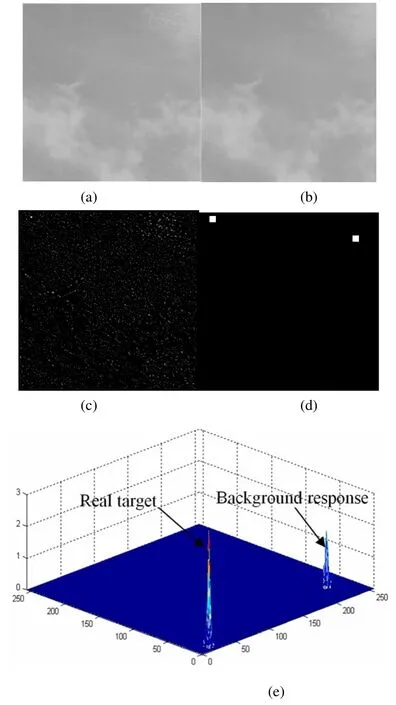
图2 单帧图像背景抑制的效果示意图 (a)为原始单帧图像xi(m, n);(b)为用最大中值滤波得到的背景预测yi(m, n);(c)为原始图像与背景预测的差值zi(m, n);(d)中白色部分为潜在目标区,黑色部分为非潜在目标区;(e)为将差值图像zi(m, n)在潜在目标区使用均值滤波,在非潜在目标区使用最小值滤波得到的抑制背景图像Ai(m, n)Fig.2 Background suppression of a single image.(a)The first imageframe; (b) Background prediction; (c) Difference between original image and background prediction; (d) The white parts are candidate target region and the Black parts are non-candidate region; (e)Background suppression result
2 有灰度权值的Hough 变换
在实际获得的红外弱小目标序列图像中,目标轨迹在一个较短的时间段内通常近似于直线[11]。基于这样的假设,将多帧图像叠加,然后针对叠加得到的图像进行直线轨迹的检测,即可判断序列图像中是否有目标存在。
Hough 变换是一种常见的直线检测方法,它将原始图像空间中的每一个点映射为参数空间上的一条正弦曲线。通过图像空间到参数空间的变换,将原始图像中的直线检测问题,变换成寻找参数空间中的峰值点问题,降低了计算的复杂度[12]。
设图像空间上有一点P(x,y),通过下式(2)映射到Hough 参数空间H(ρ,θ),即:

图3 为3 个共线点的Hough 变换原理图。传统的Hough 变换通过各种边缘检测的方法(如Canny 算子)将原始图像进行阈值分割操作,对二值化后的图像进行变换。这种方法在能量积累过程中将所有超出阈值门限点的权值都视为1,没有充分利用图像的灰度信息,使得对信噪比更低的弱小目标检测效果不理想。本文提出了有灰度权值的Hough 变换,将原始图像的灰度值作为该点的权值。最终比较参数空间中每一个点多次叠加的均值,均值最大的点对应图像空间中的目标轨迹。
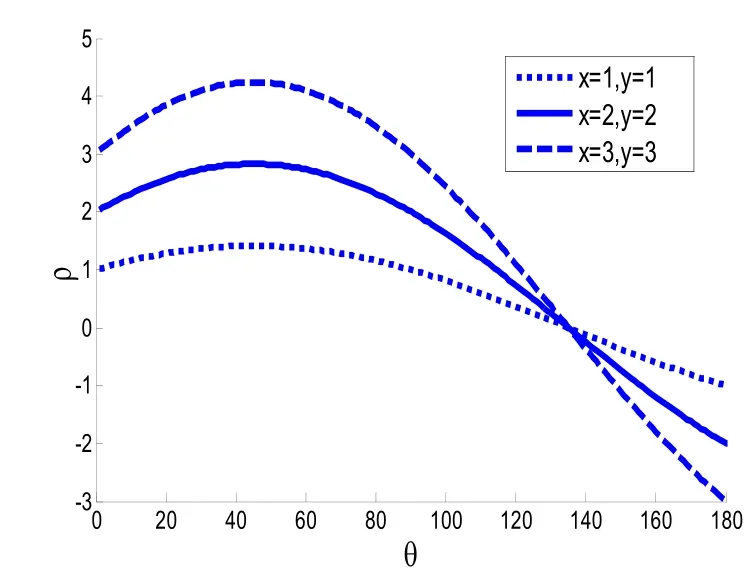
图3 Hough 变换原理图Fig.3 Basic principle of Hough transform
3 实现步骤
针对红外弱小目标的特性,我们提出了一种结合最大中值滤波与Hough 变换的检测方法,其基本步骤如下:
步骤1:对序列图像的每一帧xi(m,n)采用最大中值滤波的方法进行滤波操作。根据公式(1)得到滤波输出yi(m,n)。这种滤波可以滤除孤立的点,从而得到对背景结构的估计。被滤除的孤立点可能是真实目标也可能是背景噪声。

步骤2:用原始图像减去最大中值滤波输出,从而达到抑制背景结构干扰的目的。

步骤3:用阈值将差值图像Zi(m,n)转换为二值图像以判别目标的潜在区域。阈值的选择可以适当小以保证目标的引入,同时允许背景干扰的引入。

步骤4:我们假设目标小于16×16 个像素。对滤波后的每一帧图像Zi(m,n)在潜在目标(ti(m,n)=1)周围16×16 个像素区域内使用均值滤波的方法,在非潜在目标区使用最小值滤波方法最大限度地抑制背景,得到抑制背景后图像Ai(m,n)。
步骤5:将抑制背景后的N帧图像Ai(m,n)直接叠加得到合成图像Si(m,n),然后采用有权值的Hough变换检测目标轨迹。

步骤6:沿目标轨迹进行傅里叶变换,傅里叶变换峰值处所对应频率f即为目标运动频率。由此可得到目标运动的步长Step=1/f。
步骤7:将步骤4 抑制背景后的N帧图像Ai(m,n)按照步骤5 检测得到的轨迹和步骤6 得到的运动步长Step 移位叠加。
步骤8:根据步骤5 得到的目标轨迹,将步骤7得到的叠加图像中远离轨迹的亮点去除,检测完成。
4 实验结果与分析
为了验证该方法的有效性和可靠性,本文采用仿真的方法在红外云层背景上叠加人为目标产生10 帧待检测图像序列,目标在图像中匀速直线运动。待检测图像序列位深8 位,大小为256×256 像素。序列1和序列2 背景保持恒定不变,序列3 背景有低速的运动。步骤3 中的阈值Ti(m,n)取为图像最大灰度值的一半。目标的信噪比定义为:

式中:x为目标平均灰度值;μ为图像平均灰度值;σ为图像灰度标准差。
图4、图5 和图6 中(a)为原始单帧图像xi(m,n);(b)为用最大中值滤波得到的抑制背景图像Ai(m,n);(c)为抑制背景图像Ai(m,n)直接叠加得到合成图像Si(m,n);(d)为合成图像Si(m,n)上沿目标轨迹的像素灰度值的傅里叶变换;(e)为抑制背景后的N帧图像Ai(m,n)沿目标轨迹以运动步长移位叠加得到的图像;(f)为检测结果。
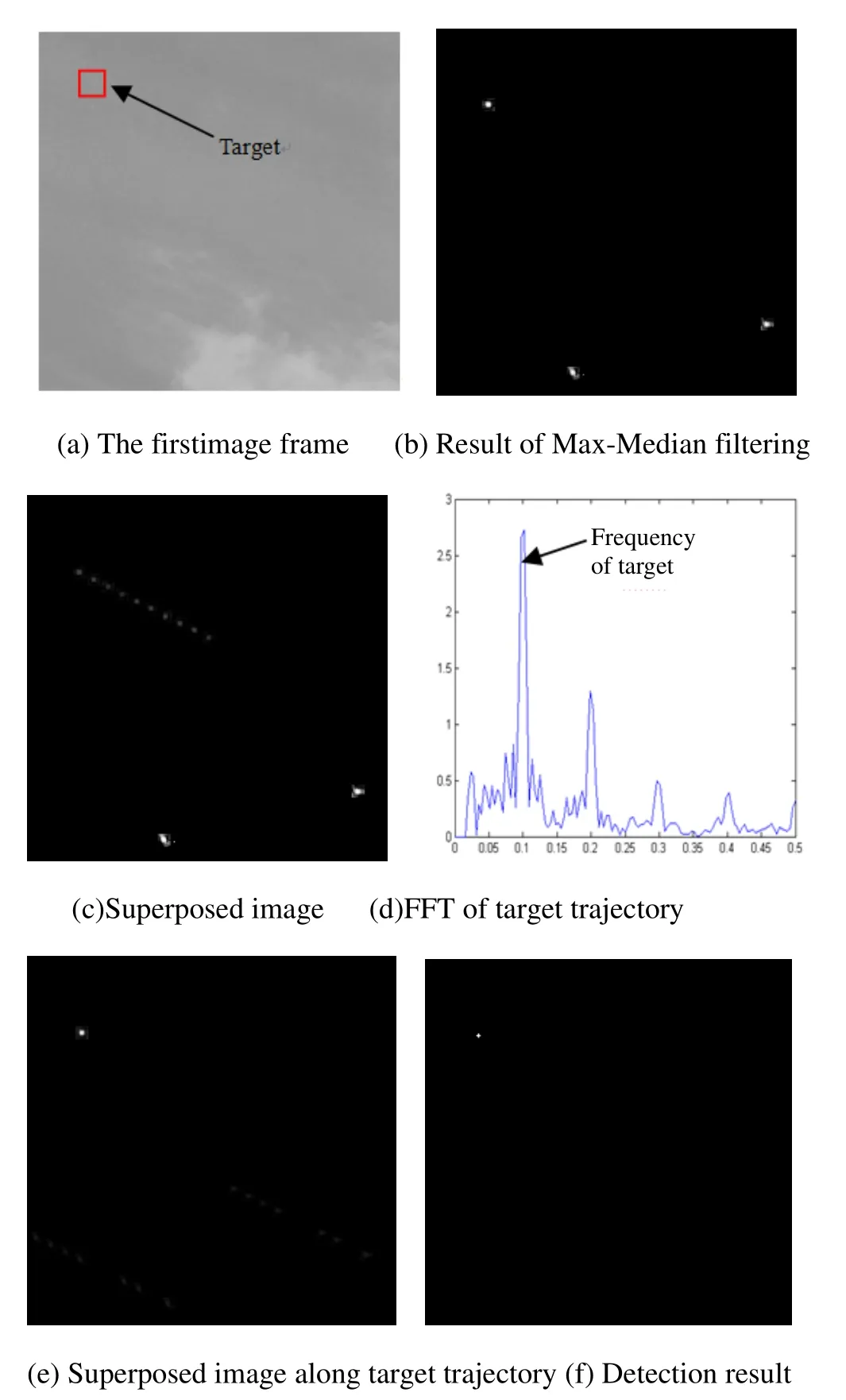
图4 序列图像1 检测效果图Fig.4 Detection results on Image Sequence 1 with small target
图4 为序列图像1 的检测效果图。原始图像中包含少量云层,背景恒定。图像灰度均值154.0,目标灰度均值161.0,图像信噪比为0.77。
图5 为序列图像2 的检测效果图。原始图像中包含大量云层,目标被云层淹没,背景恒定。图像灰度均值166.7,目标灰度均值178.2,图像信噪比1.14。
图6 为序列图像3 的检测效果图。原始图像中包含大量云层,目标被云层淹没。图像背景以每帧2 像素的速度水平移动。图像灰度均值166.7,目标灰度均值177.3,图像信噪比1.05。
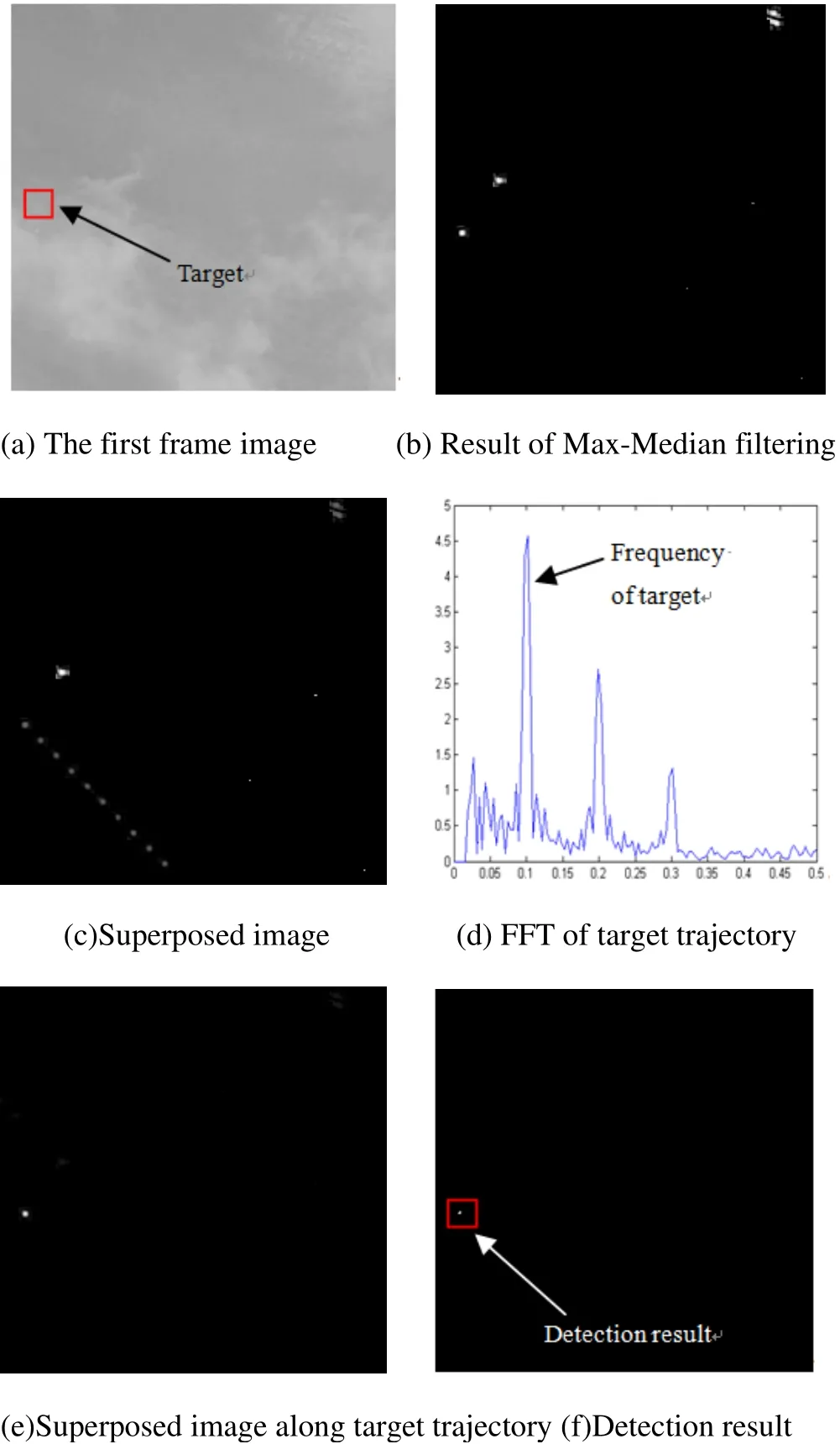
图5 序列图像2 检测效果图Fig.5 Detection results on Sequence 2 with small target
从实验结果可以看出本方法对信噪比接近1 的红外弱小目标有很好的检测效果。从图6(c)中我们看到第4 帧图像背景抑制后的图像A4(m,n)中没有检测到目标,但这并不影响最终的检测结果,由此显示了该方法的稳定性。这种稳定性源于Hough 变换目标检测的稳定性。从序列3 的检测结果可以看出背景的低速移动不仅不影响该方法的性能,反而会提高该方法的检测效果。为验证该方法在背景高速运动时的检测效果,我们以序列图像3 为基础,将背景移动速度从2像素/帧提高到25 像素/帧,高于目标移动速度。实验结果显示该方法仍然可以准确判断出目标轨迹。这是因为背景的移动使得由背景产生的响应在叠加的过程中没有累加在同一个位置上,使得背景响应能量相对分散而有利于目标和背景响应的区分。
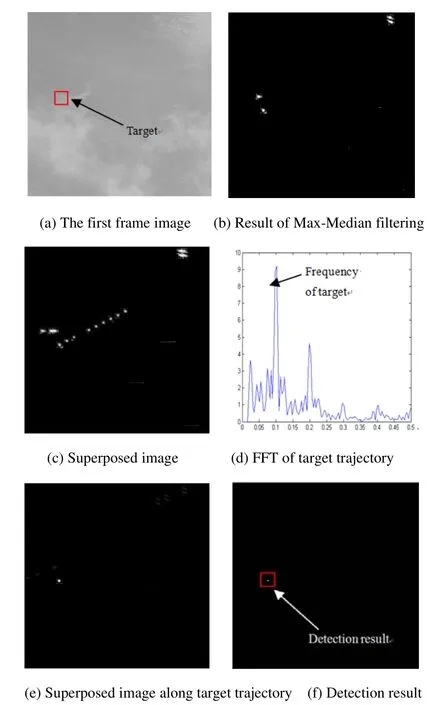
图6 序列图像3 检测效果图Fig.6 Detectionresults on Sequence 3 with small target
需要指出的是,上述仿真实验中背景云层的变化较为平缓。对于更加复杂的背景,比如背景中存在较多孤立亮点的情况,该方法的误报率会有所提高。一种可能的解决方法是增加Hough 变换中序列图像的帧数,通过在目标轨迹方向累积更多能量来提高检测效果。但帧数的增加并不是没有限制的。随着帧数的提高,图像采集的总时间会随之增加,这可能使得“目标在短时间内呈直线运动”这个基本假设不再成立。
5 结论
本文提出的基于最大中值滤波与Hough 变换的红外弱小目标检测方法可以实现信噪比接近1 的弱小目标的检测。实验结果表明背景的运动不会影响方法的检测性能。该方法主要基于目标的匀速直线运动和目标的空间高斯分布两个假设,在大多数情况下红外弱小目标序列图像能够满足上述假设。但当不能满足以上假设时本方法检测效果会显著降低。另外,当目标轨迹仅占据图像中很小一片区域时,会给Hough 变换带来困难,从而影响检测准确度。
猜你喜欢
疯狂英语·新悦读(2023年3期)2023-10-10 21:22:02
北京航空航天大学学报(2022年6期)2022-07-02 02:00:02
高技术通讯(2021年3期)2021-06-09 06:57:48
自动化学报(2017年5期)2017-05-14 06:20:56
光学精密工程(2016年1期)2016-11-07 09:01:59
空间控制技术与应用(2015年3期)2015-06-05 14:30:31
宠物世界·猫迷(2015年7期)2015-05-30 10:48:04
遥测遥控(2015年2期)2015-04-23 08:15:18
红领巾·萌芽(2015年1期)2015-04-10 21:31:44
电子设计工程(2014年20期)2014-02-27 12:01:00
