
低速大扭矩永磁同步电机矢量控制技术
2020-07-28 02:29刘亚兵王海清王元奎王小雷段凯源
微特电机 2020年7期
刘亚兵, 李 译, 王海清, 王元奎, 王小雷, 段凯源
(1.中国船舶重工集团公司 第705研究所昆明分部, 昆明 650101;2.中国民航大学 计算机科学与技术学院, 天津 300300;3.海装驻昆明地区第二军事代表室,昆明650101)
0 引 言
无人水下航行器(以下简称UUV)作为一种水下无人作战平台,近年来在世界范围内得到了迅速的发展[1]。无论是美军的MANTA、海神,或是德国的Orca,其显著特点就是电动力推进、噪声小、 航速低、推进效率高[2-4]。大型UUV的提出始于2004年发布的《美海军UUV总体规划》[5],该规划依据载体平台的直径、排水量、载荷等指标将UUV划分为便携式、轻型、重型及大型4类。美海军更是陆续出台相关指引性文件,强调加快大型UUV的研发,并接连提出MANTA、水螅项目及爪子等大型UUV的需求。与此同时,西方传统军事强国如英、德、法等国家也在开展大型UUV的研制[6]。因体积容积巨大,大型UUV可携带多种任务载荷,实施多样化任务,已成为水下装备发展的重要方向。
作为低航速的水下无人装备,大型UUV通常采用电动力推进,低速、大扭矩是其推进电机的特征之一。将永磁同步电机(以下简称PMSM)作为驱动机构是当前国外先进UUV普遍采用的方案,相较于无刷直流电动机,PMSM在低速性能、噪声特性、转矩脉动等方面均表现出色。本文将针对大型UUV用低速大扭矩永磁同步电机控制技术进行研究。
1 磁场定向控制策略
无刷直流电动机的三相驱动电流为方波,由于采用120°两两导通方式,功率器件的轮序导通将使得电机相电流在换相点出现“凹陷”,引起转矩脉动的同时也增大了电磁噪声。与无刷直流电动机不同的是,驱动PMSM运行的三相电流为平滑的正弦波,采用磁场定向矢量控制技术。对电机的控制实质上都是对其电磁转矩的控制,为简化分析,建立PMSM数学模型时,通常作如下假设:忽略磁饱和效应、铁损及磁滞影响,感应电动势为理想正弦波,在同步旋转d,q坐标系中,PMSM的电磁转矩方程[5]:
(1)
式中:Te为电磁转矩;p为转子极对数;ψf为转子磁链;id,iq为直轴、交轴定子电流;Ld,Lq为直轴、交轴电感。对PMSM转矩的控制实质上就是对定子电流在旋转坐标系中d轴及q轴上的分量id,iq的控制。
图1为PMSM定子电流iS在旋转坐标系中的矢量图,id,iq与iS满足式(2)所示关系:
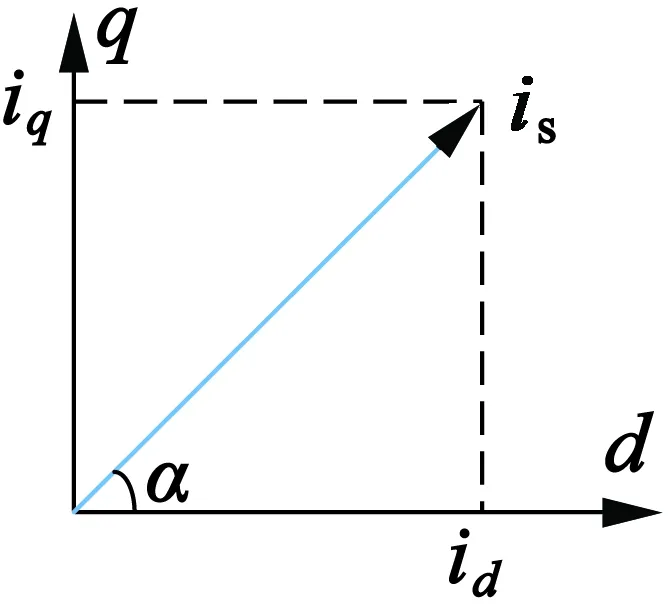
图1 定子电流矢量图
(2)
对于表贴式PMSM而言,直轴电感与交轴电感接近,实现对定子电流矢量在交轴分量的控制就能实现对电机电磁转矩的控制,这就是矢量控制的原理。因此,实时获取定子电流幅值大小及转子位置就成了磁场定向控制的关键所在。
图2为磁场定向控制原理框图。定子电流ia,ib为电机任意两相相电流,由霍尔型电流传感器实时测得,转子位置θ由旋转变压器(以下简称RVDT)实时测得,令idRef=0,通过内环PI控制器实时控制id,iq,外环PI控制器实时控制电机转速,实现对电机转速及电流的双闭环控制。

图2 磁场定向控制技术框图
2 改进型控制策略
本文分析了针对PMSM的传统磁场定向控制技术原理,采用PI控制器,将电机实时转速及相电流作为各自控制器的反馈变量。电机转速是根据RVDT旋转的角度间接计算而来,若计算出的实时转速与实际转速偏差较大,那么速度PI控制器将产生非正常的iq给定值,进而引起电流环PI控制器失调,使得系统振荡,严重时会损坏组部件;而电机相电流是呈正弦周期变化的变量,并易受外界电磁环境干扰,传统控制策略中将相电流的A/D转换结果直接参与Clarke变换,且两个电流环的输出结果互不耦合,极易引起PI控制器失效。针对以上缺陷,下面介绍改进型控制策略。
2.1 转速滤波控制
准确的速度计算不仅影响电机速度输出,而且对电流环的控制也起到了决定性作用,特别是在低速应用场合,良好的速度控制策略至关重要。在系统中,转子位置信号依靠RVDT获取,RVDT输出的是角度信息θ(t),那么单位时间内电机转过的角度即是转速:
她知道顾盼爱她,从认识她到现在,已经爱了两年。凭良心讲,他也算才貌出众,虽然职业危险了点,较她却也不相伯仲。可毕竟一个兵一个贼,不该走一条路,更不能上一条船。
(3)
离散化表达式:
ω(k)=K1[θ(k)-θ(k-1)]
(4)
根据式(4)即可计算出电机的实时转速,但由于高频噪声的存在,计算得到的实时转速值存在较大波动,如果速度PI控制器直接将此不真实的值纳入反馈量,将引起系统失控。因此,引入低通滤波器来实现转速的准确计算。即:
(5)
式中:ω(t)*为滤波后的转速;τ为时间常数。
式(5)的微分形式:
(6)
离散化后如下式:
(7)
整理得:
ω(k)*=K2ω(k-1)*+K3ω(k)
(8)

2.2 电流耦合控制

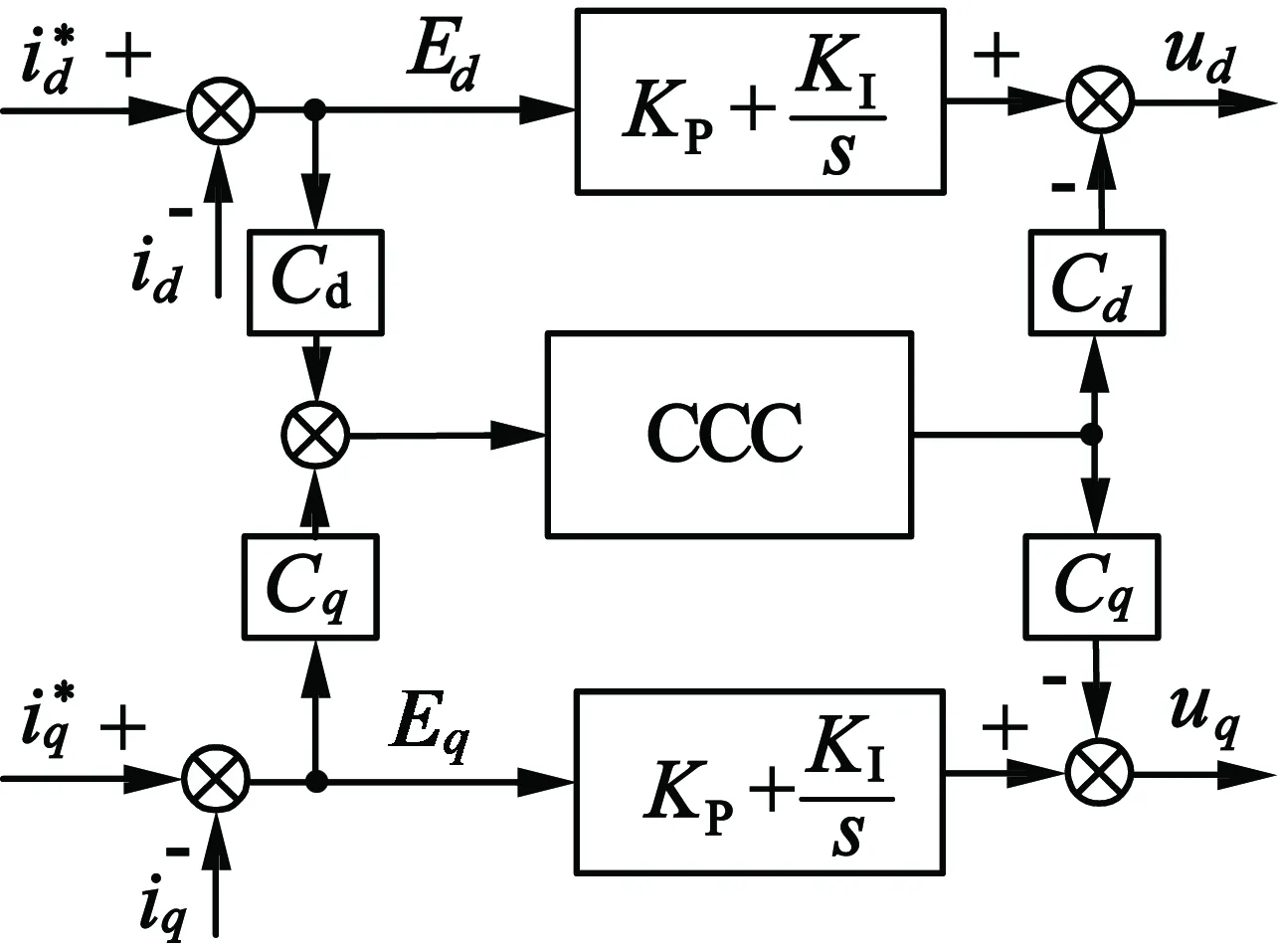
图3 交叉耦合控制原理图
定子电压值ud,uq满足如下关系:
(9)
式中:ud0,uq0为传统PI控制器的输出值;Ed,Eq为d轴,q轴的电流误差值;Cd,Cq为耦合控制器。
2.3 负id弱磁控制
电机受逆变器控制时,定子电流iS受逆变器输出能力限制,满足如下方程:
(10)
同时逆变器输出电压也受直流母线电压限制,满足如下方程:
(11)
不考虑定子电阻的影响,式(11)换成另外一种表达形式:
(12)
即:
(13)
以(id,iq)为变量,在同一坐标系中将式(10)与式(13)用曲线形式表达,如图4所示。圆形为电流限制圆,椭圆形为电压限制圆,电机运行时id,iq将一直受此电流限制圆和电压限制圆的限制。在电机负载较小时,电流及电压均未达到限制边缘,运行在图中的A点,随着转速升高,逐渐到达B点,在此之前,均采用id=0控制模式。达到B点后,继续增大负载,由于电压限制,电流将只能沿着电压限制圆向左移动,如图中的P点所示,此时,id已经变成负值,即所谓的弱磁控制;若继续增大负载,运行轨迹将最终到达Q点,即两个限制圆的交点。
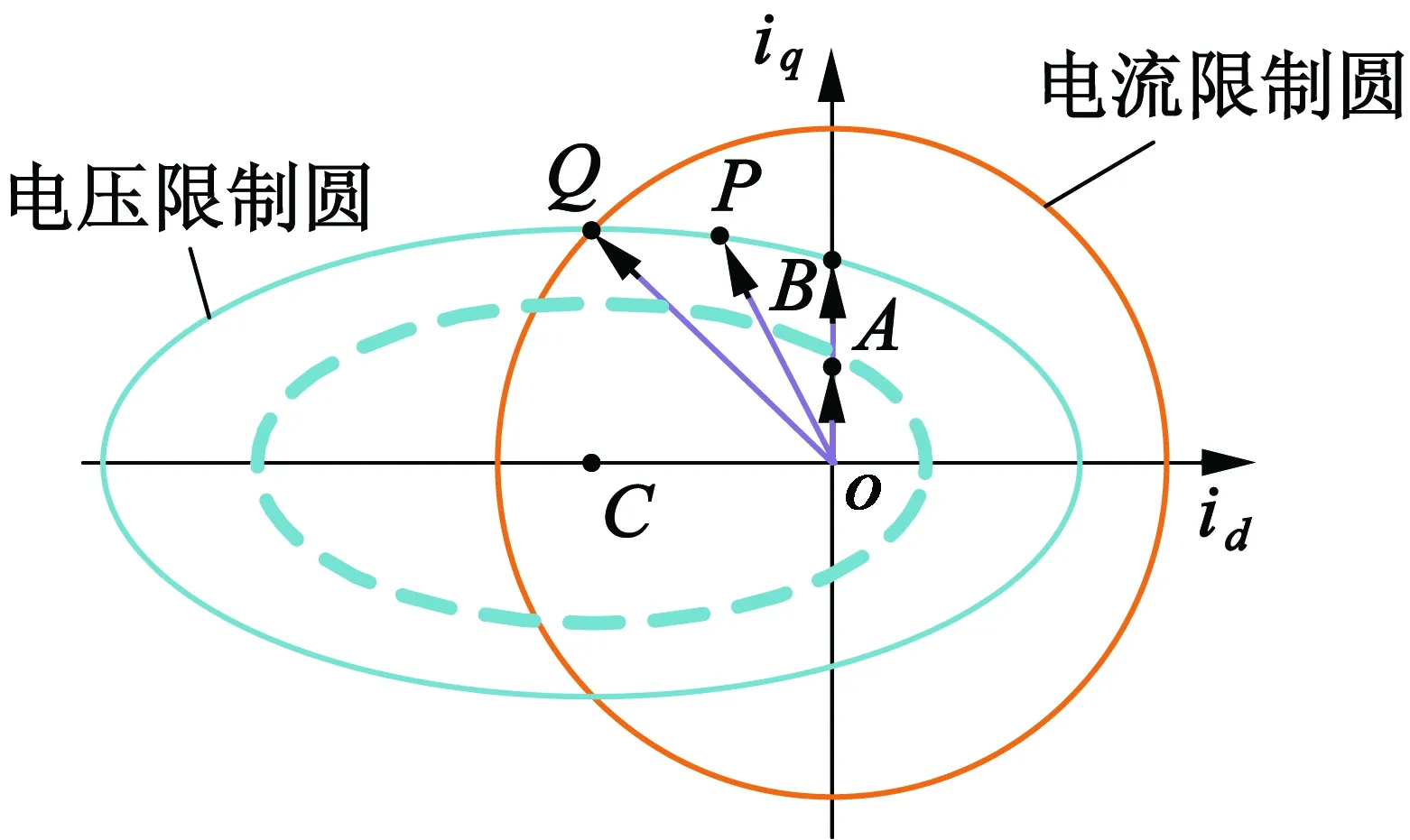
图4 电机运行过程电压及电流轨迹
UUV采用电池供电,逆变器母线电压将逐渐降低,随着负载的增大,ud和uq将达到饱和,如图4中的虚线椭圆所示,此时应采用负id控制进入弱磁区并增大弱磁角度。
3 实验研究
为验证本文所述的改进型控制策略,进行了实验测试,实验电机的部分参数如表1所示。

表1 实验电机部分参数
图5为逆变器未与电机连接时,逆变器三相输出电压波形。图6为未改进控制策略下的电机相电流波形,图7为改进后的相电流波形。传统的控制策略在电池电压较低时,PI调节器达到饱和,导致d轴电流出现振荡,采用弱磁策略之后,可对电流进行更好的跟踪。

图5 逆变器输出电压波形

图6 未改进控制策略下的相电流波形
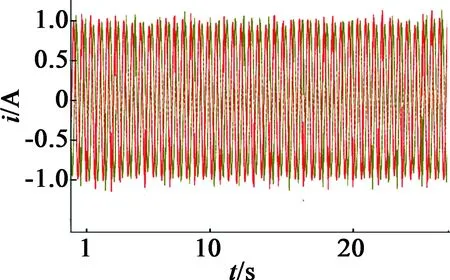
图7 改进控制策略下的相电流波形
4 结 语
大型UUV已成为世界各海洋强国大力发展的水下无人装备之一,本文针对大型UUV所用的低速大扭矩电机进行应用分析,对当下应用广泛、性能优异的PMSM进行了控制策略研究,在传统磁场定向控制技术基础上,运用转速滤波控制技术、电流交叉耦合控制技术及负id弱磁控制技术,提高了电机转速控制精度,增强了电流环PI控制器鲁棒性,解决了电池供电后期电压不足而引起的电压饱和问题,最后通过实验验证了改进控制策略的可行性。
猜你喜欢
电工技术学报(2022年20期)2022-10-29
防爆电机(2022年4期)2022-08-17
重庆理工大学学报(自然科学)(2022年5期)2022-06-18
防爆电机(2022年2期)2022-04-26
微电机(2022年1期)2022-03-21
防爆电机(2021年6期)2022-01-17
昆明医科大学学报(2021年12期)2021-12-30
防爆电机(2021年5期)2021-11-04
防爆电机(2021年3期)2021-07-21
防爆电机(2021年1期)2021-03-29
