
机器人辅助下同期前入路全髋关节联合单髁关节置换1例报道*
2020-07-27 07:00:22孔祥朋付君陈继营柴伟
中华骨与关节外科杂志 2020年6期
孔祥朋 付君 陈继营 柴伟
(中国人民解放军总医院第一医学中心骨科,北京 100853)
近年来,单髁关节置换术和全髋关节置换术广泛开展,机器人技术在此类手术中已得到广泛应用,并可有效提高手术准确性及患者满意度,减少手术并发症[1-4]。现报道1例MAKO机器人(Stryker,美国)辅助下同期前入路全髋关节联合单髁关节置换的治疗经验。
1 临床资料
1.1 一般资料
患者,女,77 岁,因右髋关节疼痛5 年,左膝关节疼痛伴活动受限3 年于我院就诊。患者于5 年前无明显诱因出现右髋关节疼痛,活动后加重,休息后缓解。口服“双氯芬酸钠缓释胶囊”及“硫酸氨基葡萄糖胶囊”后症状缓解不明显。2013 年于北京积水潭医院行右侧单髁关节置换术,术后恢复满意。
体格检查:右侧腹股沟中点压痛,右髋关节周围叩击痛,下肢纵向叩击痛阳性,右髋关节活动受限。右侧髋关节“4”字试验阳性,股骨滚动试验阳性,Harris评分41 分。右髋关节活动度:(屈)90°~(伸)0°;(内收)10°~(外展)20°;(内旋)5°~(外旋)10°。左膝关节内侧间隙压痛阳性,髌骨活动受限,髌骨研磨试验阳性,过伸过屈阳性,HSS评分57分。
1.2 手术治疗

图1 手术体位及参考架放置
1.2.1 全髋关节置换术:全身麻醉后,患者取平卧位,以髂前上棘为中心于骨盆下横行放置体位垫,大腿轻度后伸位。常规碘酒、酒精消毒术野皮肤,铺无菌巾单。于左侧髂前上棘放置参考架(图1)。取右髋关节直接前侧入路,起自髂前上棘远端3 cm偏外3 cm处沿股骨长轴稍偏外至股骨中上段,长约12 cm,逐层切开皮肤、皮下组织,显露阔筋膜张肌表面的筋膜层,沿肌纤维方向将阔筋膜张肌的筋膜分离。将筋膜内缘从肌肉分离,显露脂肪条带,钝性分离至股骨颈上方,分别将拉钩置于关节囊外股骨颈上方及阔筋膜张肌的内侧并牵至股骨外侧。将阔筋膜张肌与缝匠肌仔细分离,电凝旋股外侧动脉升支及其分支血管,轻度屈髋关节,电刀松解股直肌反折头,用钝性拉钩置于髋臼前方,显露并切开前关节囊即可见股骨颈,于股骨颈中段及股骨转子窝上方0.5 cm连线处采用双截骨法垂直股骨颈截骨,外旋下肢,取出股骨头。髋臼拉钩使髋臼充分显露,彻底清理髋臼周围关节囊及髋臼内软组织,最终确定术前计划(图2)。在MAKO 机器人辅助下,依次用36~50 mm 髋臼锉磨削髋臼,清净磨削的碎屑,于外翻40°、前倾20°方向打入直径为50 mm Trident 生物型金属外杯(Stryker,美国),检查髋臼周围无明显骨赘,安装36 mm Delta陶瓷内衬。置股骨于内收外旋位,移动折叠床使髋关节过伸,用脱位钩牵拉股骨腔将股骨移向前方,电刀松解周围关节囊,并将于股骨颈横断面最长径小转子皮质内侧处,依次以1~4号偏心髓腔锉沿股骨髓腔打入股骨近端,安装4 号AccoladeⅡ生物型股骨假体柄(Stryker,美国)。安装36 mm股骨头试模,复位后查关节紧张度良好,屈髋90°、内旋45°并极度后伸外旋检查髋关节稳定。取出试模,安装直径为36 mm Delta陶瓷股骨头假体,复位后检查髋关节稳定性。无活动性出血,氨甲环酸浸泡。逐层缝合并包扎(图3)。
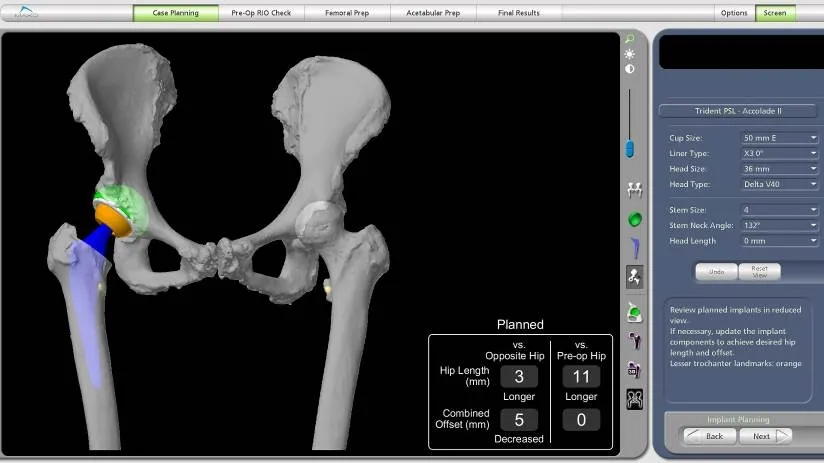
图2 MAKO机器人辅助下前入路全髋关节置换术的术前计划
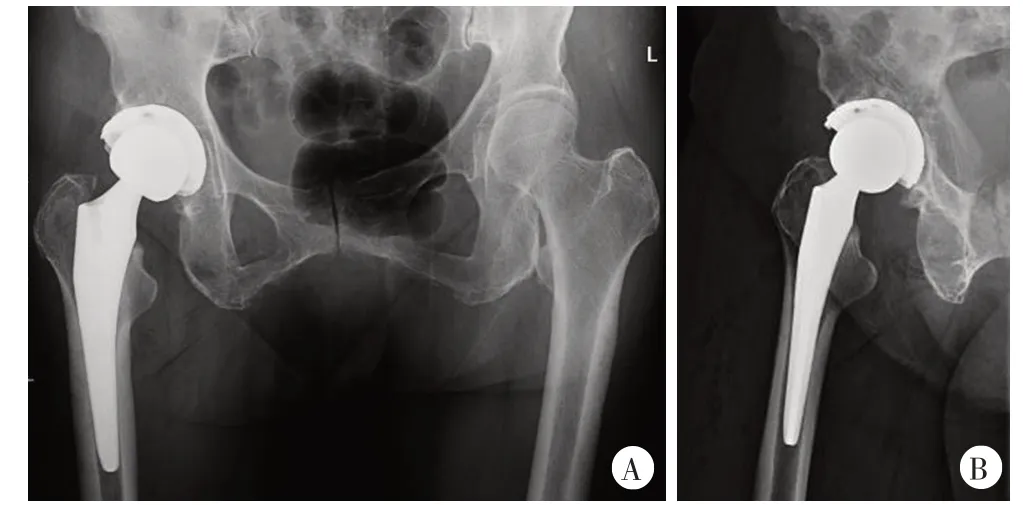
图3 MAKO机器人辅助下前入路全髋关节置换术后右髋关节正(A)、侧(B)位X线片
1.2.2 单髁置换术:左膝关节术野常规碘酒、酒精消毒,铺无菌巾单,摆臂工作台固定左下肢。于胫骨及股骨干处安装膝关节定位器(Stryker,美国)。取左膝髌骨内侧长约7 cm 切口,起于髌骨上极内侧缘,止于关节线下2 cm 胫骨结节内侧。切开皮肤、皮下组织、筋膜至关节囊,屈伸膝关节探查关节见股骨内髁及胫骨内侧平台前侧软骨磨损严重,后方、外侧间室及滑车软骨良好,前交叉韧带完好。屈膝关节,部分切除髌下脂肪垫,安装胫骨和股骨检查点,分别于股骨远端和胫骨近端植入2枚3.2 mm×140 mm和2枚3.2 mm×80 mm骨针,固定股骨和胫骨参考架。然后依次注册髋关节旋转中心、内外踝尖、股骨髁和胫骨平台。切除股骨和胫骨侧骨赘后,检查软组织平衡,采集膝关节屈伸活动过程中内外翻和内外旋角度,再次微调术前手术计划(图4)。调整MAKO 机器人机械臂的位置并注册机械臂,再次用探针认证股骨检查点以及机械臂磨钻,然后在3D实时导航下开始打磨股骨,完成股骨骨床准备。同法完成胫骨骨床准备。脉冲冲洗切口,切除内侧残余半月板和股骨骨赘,软组织电凝止血。安装股骨3号、胫骨3号试模,并用探针检查试模的位置与术前计划是否一致,确认位置无误后安装8 mm 衬垫试模,并去除试模边缘骨赘和软组织。驱血后上止血带,取出试模,脉冲冲洗切口,调好骨水泥,计时开始,安放膝关节3 号胫骨、3 号股骨假体、8 mm 衬垫试模。伸直位保持计时至15 min。骨水泥固化后检查稳定性、屈伸活动以及内外翻范围,确认最终厚度为8 mm,型号为3 号的超高分子量聚乙烯衬垫。大量生理盐水冲洗伤口后复位膝关节,测力线经过髌骨正中,关节屈伸活动度:130°~0°。氨甲环酸浸泡切口,逐层缝合并包扎。手术所用假体为MCK单髁膝关节假体(Stryker,美国)(图5)[5-7]。
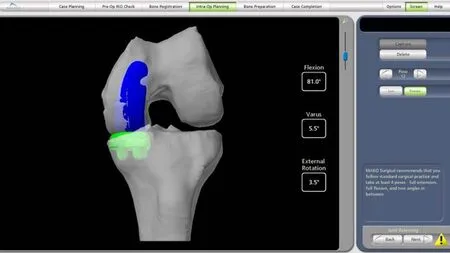
图4 MAKO机器人辅助下单髁关节置换术的术前计划
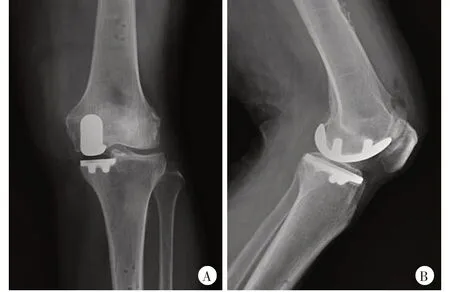
图5 MAKO机器人辅助下单髁关节置换术后左膝正(A)、侧(B)位X线片
1.3 术后处理
予以抗凝、镇痛及抗感染治疗,术后1 d 在家属帮助下完成下地行走、如厕等活动。术后复查X线片示假体位置及下肢力线良好(图6)。
2 讨论
MAKO 机器人主要组件是RIO 机械臂、导航模块和摄像立架(图7),同时配以髋膝关节假体系统,可完成单髁关节、髌股关节、全膝关节以及全髋关节置换术。术前根据患者影像学资料进行个性化设计,术中骨科医师和手术室团队在机器人辅助下采取微创、精准的截骨手术方式,以恢复自然的髋关节和膝关节功能。
在MAKO 机器人膝关节系统导航模块辅助下,术中可实时精确地完成截骨,调整假体植入位置、角度及软组织平衡,并通过微创的手术方式减少骨与软组织的损伤,利于患者早期康复训练。Bell 等[8]研究表明,MAKO机器人在单髁关节置换术中,胫骨、股骨植入的单髁假体组件在冠状面、矢状面、水平面上均较传统手术更为精准。Mustafa 等[9]使用6 具尸体标本(12 例膝关节)对比研究了MAKO 机器人单髁手术与传统单髁手术的精准度,证明MAKO 机器人的手术精度较高。据报道,MAKO机器人可以通过计算机和机械臂操作提高假肢置入的准确性,从而在术中显著降低偏差和异常值[10-12]。
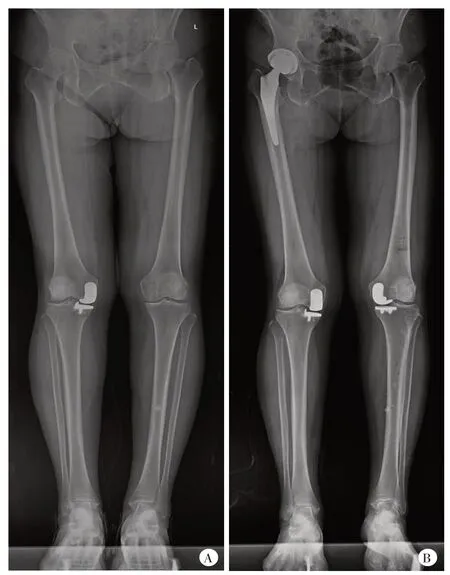
图6 MAKO机器人辅助下同期前入路全髋置换联合单髁置换术的术前(A)、术后(B)下肢全长X线片
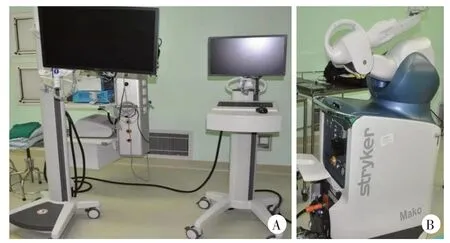
图7 MAKO机器人主要组件
MAKO 机器人髋关节系统导航模块可以通过RIO 机械臂精准限定髋臼锉和股骨髓腔锉进入的深度并指导磨锉的方向和角度,从而使全髋关节置换术更加安全和精准。Perets 等[13]跟踪随访162 例行MAKO 机器人辅助的全髋关节置换术患者2 年,与以往文献报道的非机器人手术术后并发症发生率进行对比,证明MAKO 机器人的短期并发症发生率较低。Tsai 等[14]研究表明,MAKO 机器人THA 手术可有效恢复原有的髋关节解剖结构,与传统手术相比,能更精确地恢复髋关节旋转中心。
传统全髋关节置换术多采用侧卧位,而膝关节置换术采取平卧位。如同期进行,术中需要重新消毒翻身更换体位,麻醉时间过长,对于老年患者有较大风险;另外,缺少全髋关节置换术后下肢长度的影像学评估,再次进行左侧单髁置换时,将对下肢力线及下肢长度恢复带来挑战。前入路全髋关节置换术主要经肌间入路,具有快速康复及脱位率低的特点[15,16]。本例患者在MAKO机器人辅助下同期行前入路右侧全髋关节置换术和左侧单髁关节置换术,术中无须更换体位消毒,有效减少了麻醉时间,降低了手术风险。本例患者数年前在外院行右侧单髁关节置换术,现右膝外侧已经出现疼痛症状,右膝X 线片可见右膝外侧间室轻度骨关节炎。在左侧膝关节单髁置换术后,若假体位置安放欠佳,将引起右下肢力线改变或双下肢长度不等,会加快右膝关节外侧间室骨关节炎进展。在MAKO 机器人辅助下,通过术中导航,精确计算了下肢力线及下肢长度,辅助医师术中精确完成截骨,确保术后下肢力线平衡,有效防止右膝关节外侧间室骨关节炎进展。
猜你喜欢
疯狂英语·新读写(2023年5期)2023-06-02 02:05:02
疯狂英语·新读写(2023年1期)2023-04-06 01:26:32
中华骨与关节外科杂志(2022年1期)2022-08-31 09:18:48
基层中医药(2022年1期)2022-07-22 07:22:16
中华骨与关节外科杂志(2016年6期)2016-05-17 06:11:13
中华骨与关节外科杂志(2016年6期)2016-05-17 06:11:09
中华骨与关节外科杂志(2016年5期)2016-05-17 06:11:01
中华骨与关节外科杂志(2016年5期)2016-05-17 06:10:53
中国卫生标准管理(2015年25期)2016-01-14 09:29:18
中外医疗(2015年11期)2016-01-04 03:58:43
