
路感模拟器研究现状及发展趋势
2020-07-24 10:17张小乐
汽车电器 2020年7期
张 博,张小乐,张 善
(联创汽车电子有限公司,上海 201206)
1 线控转向的研究概念及行业环境
线控技术 (X-by-Wire)源于飞机控制系统,1972年NASA推出应用,对比传统的机械和液压系统,线控系统显著提高了飞机的性能,而1960年首次应用在汽车上发展到现在正逐渐走向商业化。
到2020年,汽车DA (驾驶辅助)、PA (部分自动驾驶)、CA(有条件自动驾驶)系统新车装配率超过50%,网联式驾驶辅助系统装配率达到10%,满足智慧交通城市建设需求。到2025年,汽车DA、PA、CA新车装配率达80%,其中PA、CA级新车装配率达25%,高度和完全自动驾驶汽车开始进入市场。
2 转向系统架构介绍
线控转向系统结构组成及功能如图1所示,其中:上层反馈器有路感模拟、角度控制、机械锁止功能;下层执行器有角度控制、冗余控制等[1-5]。
2.1 国外发展现状
丰田集团的研究学者采用状态观测器和曲线拟合方法来完成齿条力预估,并在台架对各种工况进行了试验,试验结果模拟出的路感合理性较高,贴近传统转向获得的路感,证明该方法的可用性较高[6]。
现代集团的Sungwook等学者通过对线控转向系统分析,完成动力学建模,并结合参数曲线拟合的方法完成了路感模拟,仿真结果表明该方法在一定的工况下可以获得驾驶员期望的路感。在此基础上,Soobo Park等学者开发出了具有两种控制方法的线控转向系统原型样机,并进行了台架试验[7-8]。
雷诺集团的Julien等学者基于轮胎的回正力矩和方向盘手感之间的关系建立了线控转向系统动力学模型,并结合参数曲线拟合方法设计了路感模拟策略,为了保证系统的鲁棒性和稳定性,采用了闭环控制方法,最后进行了整车试验,结果表明该路感模拟策略和闭环控制策略对路面的干扰具有一定的鲁棒性和稳定性[9]。
TNO公司的Robert为实现线控转向系统路感模拟的低速轻便性和高速稳定性能,采用SBW动力学建模的方法,并结合传统转向系统的路感试验数据来优化线控转向系统的路感模拟,试验结果验证该方法可以还原传统转向系统的路感[10]。
日本的Shoji Asai、Hiroshi Kuroyanagi等针对线控转向系统提出了路感模拟的方法,该方法使用干扰观测器估计施加在齿条上的力矩,能够良好地模拟转向路感[11]。
2.2 国内研究现状
吉林大学的田承伟搭建了研究线控转向系统的平台,确定了汽车线控转向系统的路感模拟算法和转向控制算法,并在自主研发的驾驶模拟器上进行试验,结果表明该控制算法可以有效模拟路感和实现高精度转向[12]。郑宏宇博士结合了SBW动力学模型和Kalman算法对轮胎回正力矩进行预估,获得了驾驶员期望的方向盘手感[13]。
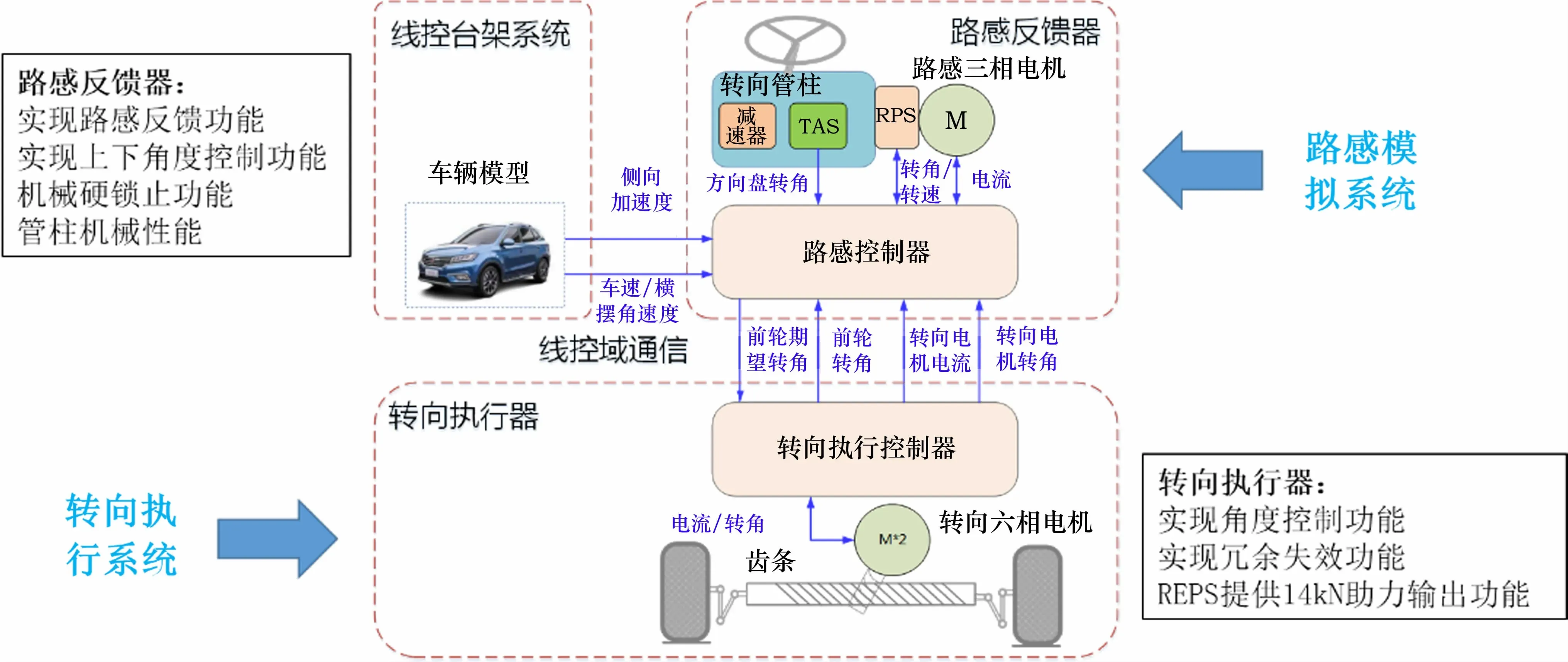
图1 线控转向系统架构
合肥工业大学的陈无畏通过观察转向盘力矩特性的影响因素,提出了一种方向盘力矩模型,并利用驾驶员偏好转向盘力矩的试验数据对模型中的参数进行了辨识,采用自适应PID控制算法对路感电机进行控制,并通过仿真分析验证了所提出转向盘力矩模型的有效性[14]。
中国石油大学的于蕾艳教授对方向盘回正力矩的来源进行了分析,该力矩与轮胎回正力矩、转向系统的阻尼、摩擦、惯性和车辆状态参数 (侧向加速度等)有较强的耦合关系。刘永等学者认为方向盘回正力矩由轮胎侧向力造成的回正力矩和纵向力造成的回正力矩组合而成[15]。
清华大学季学武和上海大众合作研发了基于线控系统的可定制化路感反馈技术研究取得了初步进展。
上海交大和联创汽车电子有限公司结合车速和车辆轮胎阻力矩等信息设计利用函数曲线、神经网络、模糊控制的最优控制器等控制算法来设计路感反馈控制器算法,并通过二自由度模型CARSIM和台架试验模拟。
3 发展趋势
目前,路感反馈力矩估计一般有3种方法[16]。
一是模拟传统的车辆机械系统,通过车速、侧向加速度和横摆角速度等,建立与路感相关的动力学模型。该方法得到的方向盘路感较为真实,近似于传统转向系统路感,可以使驾驶员把握车辆当前行驶状况,但由于模型较为复杂,不容易获得。
二是根据经验设计的原则,通过车辆状态参数 (车速、方向盘转角和侧向加速度等)与方向盘反馈力矩的映射关系,得到一个以车辆状态参数为输入、方向盘手感为输出分段函数。该函数的优点是可以通过调节相关参数,根据不同驾驶员的驾驶习惯,自由设计期望的手感。但是由于该设计是通过车辆状态参数来反应手感,而车辆状态参数对路面的反应具有一定的延时效应,所以通过该方法得到的手感对于反应路面的真实干扰存在一定的延时以及随机性,驾驶员获取对路面特征的感受真实性和实时性不足。
三是传感器电流测量或者齿条力传感器通过实际测量得到的齿条力,并利用对应的SBW动力学公式和大量的试验拟合出路感反馈力矩。
然而,这3种方法都有不可避免的缺陷,因此结合上述3种方法优缺点,如图2所示,更加系统的研究方案应该是:首先研究路感产生机理,附以人-车-路闭环控制研究进行参数拟合,综合考虑不同驾驶员、不同车型、不同车辆行驶状态、不同道路场景路面制定对应的路感控制策略,得到更贴合实际的路感,从而实现低速行驶灵活轻便性、高速行驶稳定性。
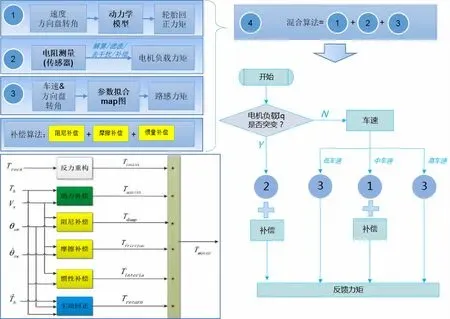
图2 路感控制算法框图
(编辑 凌 波)
猜你喜欢
航天器环境工程(2021年6期)2022-01-07
汽车之友(2021年23期)2021-12-24
新视线·建筑与电力(2021年2期)2021-09-10
中国测试(2018年9期)2018-05-14
山东青年(2016年12期)2017-03-02
安徽理工大学学报·自然科学版(2016年2期)2016-12-22
科技视界(2016年2期)2016-03-30
电子产品世界(2016年3期)2016-03-29
企业技术开发·中旬刊(2014年7期)2014-09-23
中学生数理化·八年级物理人教版(2014年2期)2014-04-02
