
高速环道几何线形设计与舒适度评价
2020-07-08 07:02林巧飞
山西交通科技 2020年2期
林巧飞
(上海市政工程设计研究总院(集团)有限公司,上海 200092)
高速环道是汽车试验场的核心试验道路,其几何线形研究一直是设计师重点关注的问题。平面线形大都由直线、圆曲线和缓和曲线组成。高速环道的几何线形研究需要从平纵横三方面进行综合设计,有机组合。最后,应检验高速环道的舒适度指标,进行舒适度评价,必要时予以修正。
1 高速环道几何线形设计
在高速环道直线和平曲线几何设计中,缓和曲线的几何设计是高速环道建设成败的关键。常用有回旋线设计法、布劳斯设计法和麦克康奈尔设计法3种,其差异在于其缓和曲线设计方法的不同。
麦克康奈尔曲线直接以人体对运动的敏感度作为道路的几何设计准则,并从车辆在缓和曲线上高速行驶时的允许最大侧摆加速度变化率出发,推导出缓和曲线设计的系列公式。因麦克康奈尔曲线以敏感阈限为标准,进行平面缓和曲线与竖曲线设计,更多地考虑了人体的舒适度,在国内众多汽车试验场高速环道中得到广泛应用。
1.1 平面设计
高速环道平面设计流程如下:
a)步骤1 根据场地大小、试验速度要求和路面最大超高值等确定一个合理的圆曲线半径值。依据平衡速度的概念,假定路面横向摩阻力为零,由力学平衡条件i=v2/gr可以计算得出圆曲线半径。
b)步骤2 根据场地大小和试验要求确定合理的直线段长度,直线段长度应保证一定的连续长度。
c)步骤3 最后设计一条连接直线和圆曲线的缓和曲线。缓和曲线的设计重点是推导出一条从直线到曲线含超高的螺旋缓和曲线,使人体感觉不到所包含的角运动和线运动的存在。
d)步骤4 计算缓和曲线上各点的侧摆角,求出缓和曲线各桩号点的路面横向超高和横坡,得出相应的曲率半径。利用支距法求出缓和曲线各点的平面坐标和偏角,编制程序计算和绘图,完成缓和曲线设计[1]。
图1是国内已建汽车试验场的高速环道,呈长椭圆状,由两段直线段、两段圆曲线和四段缓和曲线组成,总长9.036 km,圆曲线半径为670 m,设计车速为220 km/h。缓和曲线设计采用麦克康奈尔设计法,按照侧摆角加速度变化率2°/s进行反算缓和曲线长度,确定缓和曲线长度为480 m。高环平面线形设计以第四车道中心线为设计基准线。
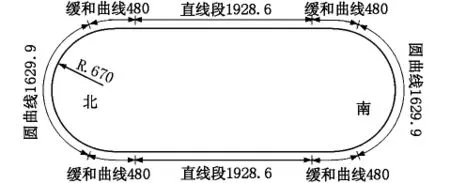
图1 高速环道平面布置示意图(单位:m)
1.2 横断面设计
高速环道曲线段横断面通常采用曲线型式,使横坡可以连续变化,适应不同位置的平衡速度要求,满足多车道不同车速要求。
在该试验场工程实例中,采用三次抛物线路面+直线段安全带的组合断面形式。横断面图见图2和图3。
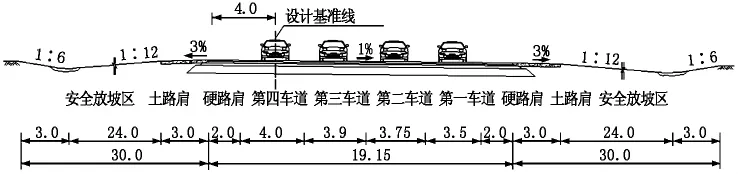
图2 高速环道直线段横断面
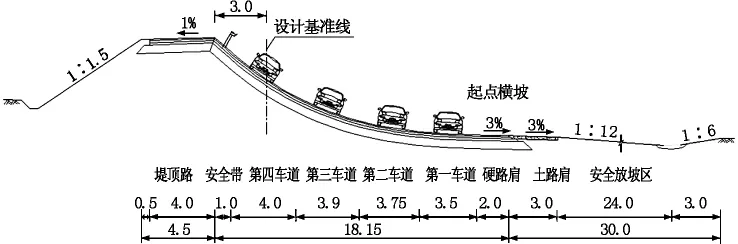
图3 高速环道曲线段横断面
1.3 纵断面设计
纵断面设计基线的选择,通常做法是路面内侧边缘保持固定,各车道行车线沿着缓和曲线逐渐爬升,利用横断面曲线方程求解横断面上各点高程。
在该汽车试验场高速环道纵断面设计中,根据场地“南低北高”的特点,直线段采用0.5%的纵坡,北端曲线段采用叠加0.5%纵坡的方案,南端曲线段在进入缓和曲线段之前由0.5%的纵坡变为0%,如图4和图5。

图4 北端缓和曲线纵断面设计线(内侧车道边缘为基准线)

图5 南端缓和曲线纵断面设计线(第三车道中心线为基准线)
2 行车舒适度指标分析
2.1 高速环道几何设计方法的评价指标
高速环道几何设计是为使用者提供一个安全、可靠和舒适的道路条件。以车辆行驶过程中乘员的舒适性指标作为高速环道几何设计的评价指标。
当车辆在小半径曲线上高速行驶时,它的6个运动自由度(即纵、横、竖3个方向的直线运动和偏向、侧摆、纵摆3个角度的旋转运动)都处在不断的变化之中,并直接影响到乘员的行驶安全性和舒适性。研究表明,只有当这些力或力的变化达到人体感觉开始极限值时,人体才会感觉到。麦克康奈尔通过大量试验找出了人体对各个运动自由度的感觉开始极限值,表1是指人体产生感觉的限度[2]。
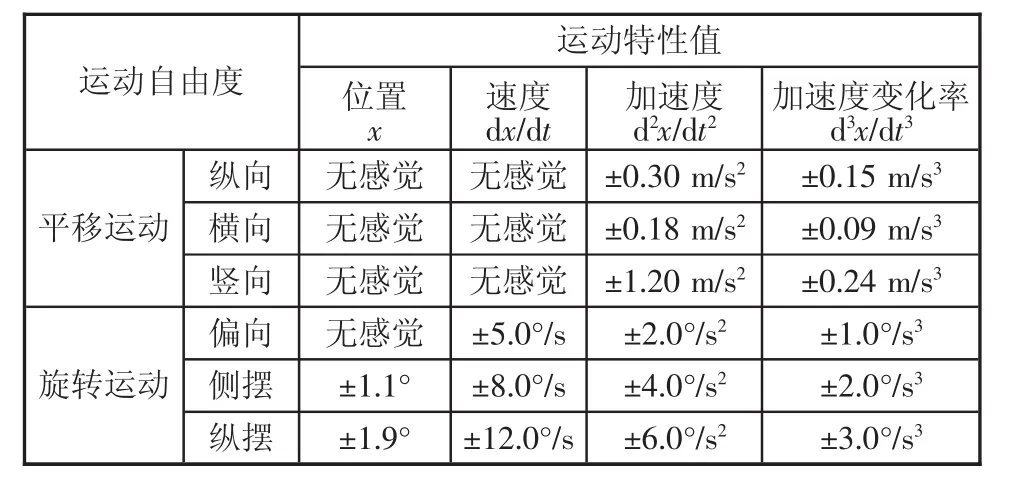
表1 人体对运动的感觉开始极限值
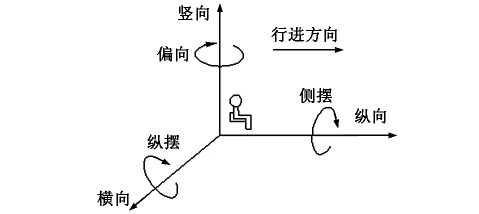
图6 6个运动自由度示意图
因此,高速环道几何设计时,如果能使各个运动自由度的特性值都控制在人体对运动的感觉开始极限值以内,则车辆的行驶舒适性良好。
6个运动自由度中,以对侧摆运动的变化最为敏感。目前汽车试验场高速环道设计通常将侧摆加速度变化率作为设计控制指标,其他自由度则作为验算指标。
2.2 高速环道几何设计的舒适度评价
假定行驶车辆沿道路设计基准线匀速行驶,设计车速220 km/h,则横向和纵向运动特征值可以不予考虑。应着重分析侧摆、偏向和竖向运动特征。
2.2.1 侧摆运动特性分析
麦克康奈尔认为:如果在进行高速环道的几何设计时将侧摆运动的特性值控制在人体对运动的感觉开始极限值内,则其他各运动自由度也能保持在感觉开始极限值以内,从而不会影响行车舒适性。

图7 车辆在曲线断面受力示意图
车辆在缓和曲线上行驶时,随着设计线超高角不断变大,其侧摆角相应改变,超高角的变化即为侧摆角的变化。该试验场高速环道缓和曲线段横断面起点横坡由直线段的1%渐变至圆曲线段的3%,渐变段为整个缓和曲线段,长度480 m。计算相应侧摆特征值时应考虑起点横坡的变化。
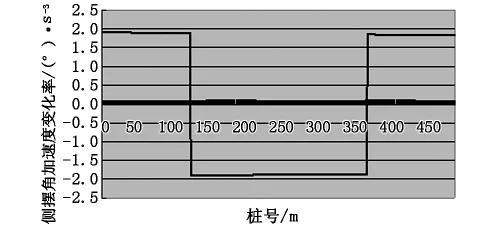
图8 侧摆角加速度变化率分布
由于横断面初始横坡的变化,侧摆角加速度变化率J并不为恒定值,其最大值为1.92。由图8可知,侧摆角加速度变化率J的变化范围很小,小于麦克康奈尔提出的侧摆加速度变化率控制指标2°/s。因此,侧摆运动指标满足设计要求。
2.2.2 偏向运动特性分析
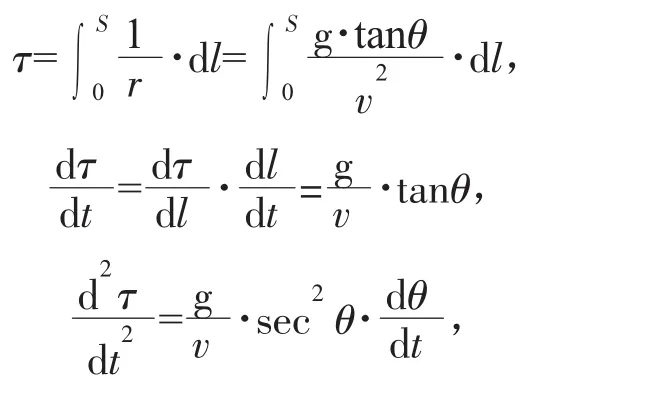
式中:dθ/dt=dφ/dt=ω为麦克康奈尔曲线的侧摆角速度。
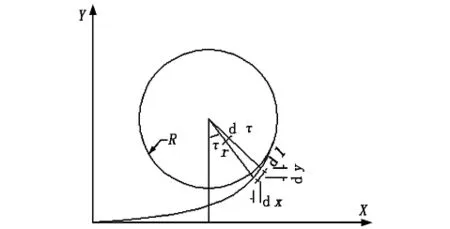
图9 车辆在缓和曲线平面位置变化示意图
计算得到的偏向角速度小于±5.0°/s,偏向角加速度小于±2.0°/s2,舒适度指标满足设计要求,如图10和图11。

图10 偏向角速度分布

图11 偏向角加速度分布
2.2.3 竖向运动特性分析
2.2.3.1 北端缓和曲线
高速环道北端缓和曲线以路面内侧边缘线为标高设计基准线,北端缓和曲线叠加了0.5%纵坡,因此内侧边缘线纵向坡度为0.5%,其余车道设计线沿横断面逐渐抬高。
北端缓和曲线以第四车道中心线为设计线,设计高程沿缓和曲线纵向抬高值为5.314 m,其中包括0.5%纵坡叠加的部分和缓和曲线自然抬高部分。经检验竖向加速度变化率峰值为0.257 m/s3,略大于0.24 m/s3的运动开始感觉极限值。考虑到峰值出现范围仅120 m,占缓和曲线全长的1/4,而其余部分特征值均小于0.24 m/s3。因此,北端缓和曲线的竖向运动指标满足麦克康奈尔设计法要求。
2.2.3.2 南端缓和曲线
高速环道南端缓和曲线以第三车道中心线为标高设计基准线,缓和曲线段标高设计基准线上纵坡为0,道路设计基准线为第四车道中心线,横断面上第三车道外侧标高沿横向逐渐上升,内侧标高沿横向逐渐下降。第四车道中心线标高是根据各横断面相应高程衔接而成,南端缓和曲线第四车道中心线标高的连续性经检验出现“跳跃点”。由于南端缓和曲线以第三车道中心线为设计基准线,第四车道中心线与第三车道中心线高差相对值不变。因此第四车道纵断面自然形成产生一定“扭曲”,需要对其进行修正,如图12。
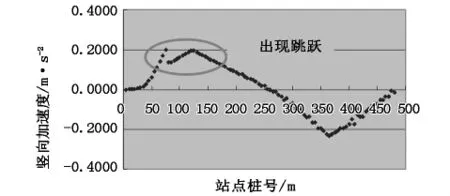
图12 南端缓和曲线第四车道中心线竖向加速度
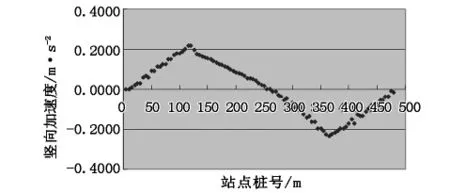
图13 南端缓和曲线第四车道中心线竖向加速度(修正后)
缓和曲线数据调整思路为改变纵断面和横断面设计顺序,先在拟合的纵断面曲线上进行缓和曲线纵断面设计,再将各个站点的横断面放在纵断面设计线上,对设计线舒适度指标进行验证,并对横断面上其他车道的纵断面设计线进行数据验证。
修正后南端缓和曲线第四车道中心线竖向加速度分布较修正前连续性得到提高,如图13。

图14 南端缓和曲线第四车道中心线竖向加速度变化率(修正后)
修正后南端缓和曲线第四车道中心线竖向加速度变化率峰值为0.127 m/s3,小于0.24 m/s3的运动开始感觉极限值,如图14。因此,修正后的南端缓和曲线的竖向运动指标满足麦克康奈尔设计法的要求。
3 结语
本文通过汽车试验场工程实例,介绍了高速环道几何线形设计的方法和步骤。在此基础上,提出高速环道几何线形评价指标,并进行检验。若某项指标超出阈限值,行车舒适度不满足要求,则予以修正。
本工程实例缓和曲线设计经检验,行车舒适度主要控制指标侧摆角加速度变化率J<2,能够满足麦克康奈尔缓和曲线设计法的要求。南端缓和曲线竖向运动指标在进行相应修正设计后亦满足麦克康奈尔缓和曲线舒适度指标的要求。
猜你喜欢
延河(2019年6期)2019-06-28
世界家苑(2018年4期)2018-05-21
中国新技术新产品(2017年24期)2017-11-30
中国医学创新(2017年3期)2017-02-22
环球人文地理·评论版(2016年8期)2017-01-19
建筑建材装饰(2016年14期)2017-01-05
微型小说选刊(2015年33期)2015-11-17
中国高新技术企业(2015年25期)2015-07-24
建材发展导向(2014年5期)2014-10-20
科技致富向导(2013年18期)2013-10-31
