
基于传感器P 信号的EPS补偿控制策略和算法
2020-07-01 10:04:54侯训波
汽车工程师 2020年6期
侯训波
(大连创新零部件制造公司)
现代汽车配装电动助力转向系统(简称EPS)已非常普遍,而EPS 系统由于电机和减速机构的存在,增加了转向系统的摩擦力,给汽车回正性能带来了不良影响[1]。回正性能又是汽车操纵稳定性的重要指标,回正性能不良不但使驾驶员产生操纵疲劳,还会影响行车安全。同时,汽车在高速行驶时,其自身的回正能力较强,阻尼较弱,又会产生回正超调现象,使汽车摆振,同样会影响行车安全。悬架定位误差和胎压异常等会引起汽车跑偏[2],虽不能使汽车发生严重的交通事故,但会增加驾驶员干预汽车的时间,加重驾驶员的疲劳感[3]。针对以上问题,通常由EPS 系统采用带角度检测能力的传感器来配合,实现回正、阻尼及跑偏等补偿,依此克服这些缺陷。文章通过对低成本纯扭矩传感器P 信号开展研究,基于此信号实现EPS 系统补偿控制,并提出相应控制策略和算法,供EPS 系统工程师参考。
1 传感器P 信号工作原理
文章所研究的EPS 系统传感器为Hella 非接触交变电磁感应式纯扭矩传感器,其输出扭矩T 信号需要2个转子与PCB 板上的预埋线圈和芯片配合,当2 个转子随上下轴转动时,由固定位置的预埋线圈感应转子角度变化,利用其相对角度差来检测并输出T 信号。其中一个40°转子及芯片所对应输出的P 信号,即为文章所研究的对象,该P 信号是脉冲宽度调制(PWM)占空比形式。
当转向盘转动时,将带动EPS 系统转向上轴旋转,使P 信号在12.5%~87.5%内变化,且以40°为一个循环周期性重复变化,这与带角度检测的传感器对比,在结构上缺少了一个磁性小齿轮和对应芯片及相关附件,即缺少了P 信号配合,无法检测绝对角度。而文章利用P 信号所具备的相对角度检测能力,再使EPS 系统电子控制单元(简称ECU)算法配合,实现绝对角度的间接检测能力,依此完成EPS 系统补偿控制。
2 EPS 系统基本角度算法
EPS 系统基本角度检测是通过ECU 对PWM_P 信号实时采样,并按相应规则计算来获得,该基本角度是参照车辆直行中位为基准零点的绝对角度。
2.1 异常P 信号过滤
为保证对P 信号正确采样,采取适当算法对异常P信号进行过滤。通常驾驶员操控转向盘的最快转角速度小于 1 000(°)/s,若 ECU 按 1 ms 的采样周期,相邻采样点变化量ΔPWM_Pn=PWM_Pn- PWM_Pn-1,其通常采样结果|ΔPWM_Pn|≤1.875%均属正常,但存在2 个特殊采样范围段,如:向右转时由85.625%~87.5%变至12.5%~14.375 5%和向左转时由12.5%~14.375%变至85.625%~87.5%,会出现P 信号采样值突变,属于区段转换的正常现象,除此之外均属异常,此时需对异常采样点赋值为前次采样值。据此分析所给出的策略,再结合信号自身特点,异常信号过滤算法如下:

当对第n 次采样,先按算式(1)进行判断,再执行算式(2),最终对PWM_P 信号采样赋值。
2.2 EPS 系统基本角度算法
当车辆下线,必须通过手动角度中点标定方法,使EPS 系统角度中点与车辆直行中位(即角度零点)重合,ECU 记忆当前基准P 信号为PWM_P0及所处区段号K=0。标定后的P 信号与EPS 系统的基准P 信号PWM_P0、区段号 K 及绝对角度 θ 等的关系,如图 1 所示。其中θ0为EPS 基准角度,设ΔPWM_P=PWM_PPWM_Pn-1。

图1 EPS 角度中点标定后PWM_P 与θ 等的关系示意图
EPS 基准角度 θ0的算法:

区段号K 的算法:

EPS 绝对角度 θ 的算法:

由算式(4)可知,区段号K 与前次区段号Kn-1相关,需ECU 连续滚动记忆,使车辆实际所处的角度区段号与ECU 计算结果保持一致。当EPS 系统断电后,且车辆转向盘在此期间又被无意转动,在EPS 系统再上电时,ECU 断电时所记忆的区段号与车辆实际转向盘所处转角范围就不能吻合了,会使角度检测出现严重偏差,不能被EPS 系统应用。因此,需找回角度中点,才能恢复各项控制功能。
3 角度中点自动找回和修正的方法
EPS 系统重新上电后,即执行角度基本算法,并可获得当前EPS 绝对转角θ。但此时,ECU 所记忆的区段号K 已不可信,故所获EPS 绝对转角θ 值也不可信,需暂停与其相关的功能,如:回正补偿、阻尼补偿、跑偏补偿等。当EPS 系统找回角度中点后,方可启动相关功能,但部分功能还需在角度中点修正后,才能启动。
角度中点找回(或称功能)是基于初始中点标定可信,即PWM_P0不变的情况下,当区段号K 可能发生异常变化而不可信,仅需找回正确K 值即可;角度中点修正(或称功能)是针对车辆直行零点与EPS 所标定中点可能存在较大偏差,影响了回正等功能,需对PWM_P0和K 同时检验并修正。
3.1 车辆直行状态分析
当驾驶员操控车辆直行时,转向盘转角也通常在零点±5°范围内微调来保持汽车直行,并且微调手力通常小于0.5 N·m。图2 示出车辆直行状态的各物理参数关系示意图。假设手动所标定的角度中点处于左侧-5°位置,同时车辆存在向右跑偏现象,此假设为车辆被向左纠偏的直行状态,EPS 系统角度中点所处为极限状态。此时纠偏手力通常小于1.0 N·m,但驾驶员长时间保持纠偏手力在0.4~1.0 N·m,也会引起驾驶疲劳,若纠偏手力大于1.0 N·m 则认为是严重跑偏,需要维修解决。维持车辆直行所需纠偏手力≤0.4 N·m,即为符合标准[4],也不会引起驾驶疲劳。
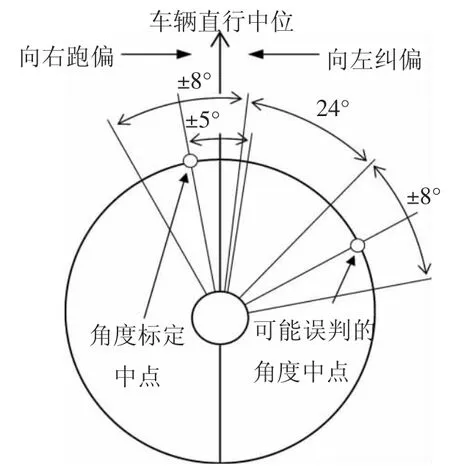
图2 汽车直行状态的各物理参数关系示意图
归纳以上分析,车辆保持直行状态,以车辆角度零点为基准,所体现出的相关参数变化范围,如表1 所示。其中手力Ts和转角θ 的方向性定义为:凡手力Ts有利于向右转向为正值,反之为负值;转角θ 以标定中点为基准,向右转角为正值,反之为负值。

表1 车辆直行时相关参数的表现状态
3.2 EPS 角度中点自动找回方法
表2 示出车辆直行时参数记录表。
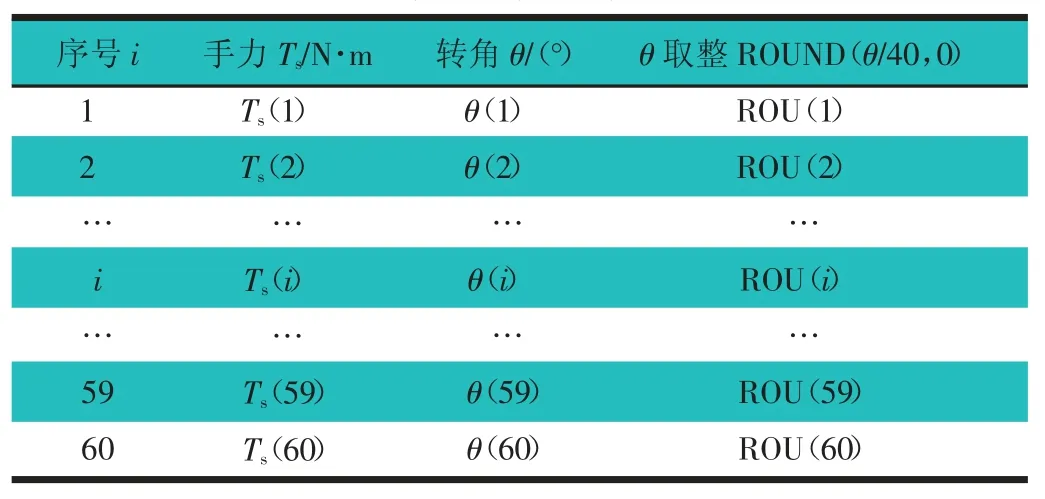
表2 车辆直行时参数记录表
当EPS 系统上电先清除表2 中所有数据。以0.5 s为记录周期,仅当 AND(|Ts|≤1.0 N·m,V≥30 km/h,|θ-40 ROUND(θ/40,0)|≤8°)时,方可对相关参数按表 2进行记录。当EPS 系统上电所记录数据填满60 组后,需在2 s 内完成统计处理,之后将自动清除表2 中所有记录,再重新开始采样并记录。所记录数据填满60 组后,需对相同 ROUND(θ/40,0)取整值的频次数 N 进行统计,提取频次数最高值Nmax对应ROUNmax,依此,按算式(6)进行K 值更新。EPS 角度中点找回算法:

在理论上,车辆持续直行30 s 后,即可自动找回EPS 角度中点。
3.3 EPS 角度中点自动修正方法
每次EPS 系统上电,当完成角度中点找回,区段号K 首次被更新后,角度中点自动找回功能即刻暂停,同时触发角度中点自动修正功能启动,并按自动找回方法中的要求及规则,来采样和记录表2 中的参数。
图3 示出标定点PWM_P0和修正点PWM_PA拓展示意图。为便于理解,初始标定角度中点的PWM_P0和θ0,已与车辆直行零点出现偏差,而能与车辆直行零点吻合的修正点,其基准P 信号设为PWM_PA,基准角度设为θA,二者角度差值设为ΔθA,ΔPWM_PA代表标定点和修正点的基准P 信号净差。

图3 标定点PWM_P0 和修正点PWM_PA 拓展示意图
ΔθA和 ΔPWM_PA的算法:

PWM_PA和 KA的算法:

基准角度θA算法:

该功能将持续运行,最终可使EPS 系统角度中点逼近车辆零点。
4 回正补偿和阻尼补偿
回正补偿特性是由转向盘转角所形成的,并随车速变化的回正补偿电流曲线族;阻尼补偿特性是由转向盘转角速度所形成的,并随车速变化的阻尼补偿电流曲线族。以下所涉及补偿电流的方向性定义为:凡有利于向右转向的电流值为正,反之为负;同时,由于左右转向的对称性,所涉及回正过程中的电流特性曲线,均以右侧转向区域所体现出的特性来表达,而左侧区域的电流特性的曲线,则是以原点对称的。
4.1 回正补偿和阻尼补偿的控制策略
图4 示出回正和阻尼的额定电流随车速变化曲线,其回正补偿控制策略为:当车速V≤Vr1时,视为驻车状态,无回正补偿电流,转向盘所至转向的位置将保持不动;当车速Vr1
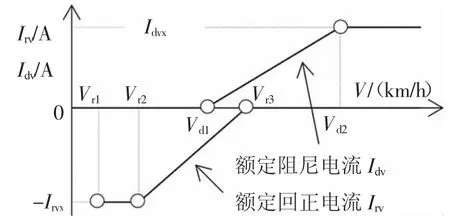
图4 回正和阻尼的额定电流随车速变化曲线
即使是同批次车辆,仍具有差异性。考虑到EPS系统所匹配参数具有普适性,也为避免出现补偿风险,需要将回正补偿的结束点车速Vr3和阻尼补偿的起点车速Vd1(如图 4 所示) 设置为Vr3>Vd1,通常Vr3-Vd1=10~20 km/h。结合某电动车的实际情况,推荐匹配参数范围,如表3 所示。

表3 回正和阻尼的补偿参数推荐范围
4.2 回正补偿算法
额定回正补偿电流算法:

图5 示出回正补偿电流随角度变化曲线。

图5 回正补偿电流随角度变化曲线
EPS 系统回正补偿与所处转角位置相关,首先需设定一个角度死区,在此范围内无需回正补偿,以防止干扰车辆直行,该角度死区定义为θr1,通常为10~20°;同时,在回正过程中,当转向盘回转接近中位时,为避免出现超调现象,需设定一个角度θr2,作为回正补偿能力递减的起点角度,通常 θr2为 60~90°,由式(10)所确定的各车速下额定回正补偿电流,即是在该角度点上的电流值。
回正补偿电流算法:

4.3 阻尼补偿算法
设转向盘转角速度为:ωd=dθ/dt。额定阻尼补偿电流算法:

图6 示出阻尼补偿电流随转角速度变化曲线,在车辆回正过程中,EPS 系统的阻尼补偿与转向盘回转的转角速度相关。当转角速度较低时,无需阻尼补偿,设该转角速度为 ωd1,通常为 80~120(°)/s;随着转角速度提高则需加强阻尼作用,特别是在较高车速时,也可避免回正超调,设驾驶员能够接受的较适宜的回正转角速度为 ωd2,通常为 200~300(°)/s,由式(12)所确定的各车速下的额定阻尼补偿电流,即是在该转角速度点上的电流值;同时,在阻尼补偿中需设定最大阻尼电流Idx(通常Idx=3.0~4.0 A)限制,以便在必须快打转向时,EPS 系统的助力作用仍能充分发挥作用。

图6 阻尼补偿电流随转角速度变化曲线
阻尼补偿电流算法:

4.4 回正补偿和阻尼补偿的调校
利用此2 种补偿特性的组合匹配,通过在整车上调校,才能实现良好的转向回正性能。其主要评价要求包括回正后剩余横摆角速度与剩余横摆角(或称残留角度),以及达到剩余横摆角速度的时间[5],同时,汽车在高速时的转向回正性能较在低速行驶时更为重要,应更加注重高速行驶的转向回正性能[6]。按表3 所示的调校参数,推荐在车速为 10,20,30,50,80,100 km/h 时来进行调校评价。
5 EPS 系统跑偏补偿
汽车行驶跑偏表现为直线行驶时,驾驶员将转向盘自由置于中间位置,汽车行驶方向偏离汽车纵轴线,驾驶员需在转向盘上施加一矫正力(或称纠偏力),以保持汽车直行[2]。GB 17675《汽车转向系统基本要求》中规定:汽车以80 km/h 的速度行驶时,驾驶员必须能在不做异常转向修正的条件下,保持汽车直线行驶。通常所需修正力≤0.4 N·m,即为符合标准[4]。
汽车跑偏因素较多,其中配装EPS 系统的车辆,由于角度中点标定的偏差较大,转向盘会出现向EPS 系统所标定角度中点一侧转动的趋势,从而造成车辆跑偏[3]。该因素所引起的跑偏现象,可由文中EPS 角度中点修正的方法来解决,而针对其它因素所引起的跑偏现象,按以下跑偏补偿的方法应对。
5.1 纠偏手力和补偿电流梯度估算
根据3.2 节中EPS 角度中点找回方法中所规定的采样条件及规则,并利用表2 所记录的相关数据,对手力Ts进行平均值统计,获得纠偏手力ΔTs和补偿电流梯度ΔIp的估算值。
纠偏手力和补偿电流梯度的估计算法:

式(13)中的补偿电流梯度设定为2 种:0.1 A 和0.2 A,主要目的是当车辆跑偏不严重时,以较小的补偿电流梯度来增减原补偿量;当跑偏较严重时,以较大的补偿电流梯度来增减原补偿量。这2 种补偿梯度值均不会引起车辆行驶中的明显手力变化,但会延迟跑偏补偿的达标时间。
5.2 EPS 系统跑偏补偿
EPS 系统初始上电时,将额定跑偏补偿电流设置为Ipn=0,之后EPS 系统无论断电或上电运行,都需记忆前次Ipn-1值,以便加上式(13)所得的ΔIp估算值,获得当前需更新的额定跑偏补偿电流值。同时,为了保证跑偏补偿不会对其它功能造成影响,以及从安全的角度来考虑,需设置额定跑偏补偿限制电流Ipmax,该限制电流是以车辆不需维修的纠偏手力(1.0 N·m),对应匹配设定的,通常Ipmax=1.2~1.8 A。
额定跑偏补偿电流算法:

当获得额定跑偏补偿电流值(Ipn)后,该跑偏补偿特性Ip与转向盘转角θ 相关,在一定的角度范围有效,并随角度增大而衰减,如图7 所示。

图7 跑偏补偿电流随角度变化曲线
跑偏补偿电流算法:

对于图7 中和式(16)中的2 个特征角度点,通常θp1=10~20°,θp2=20~30°。
6 结论
文章所述的角度中点自动找回功能和角度中点自动修正功能,均是在不影响车辆正常行驶中而自学习完成的,但在EPS 系统上电初期,会存在短时间部分功能被暂停的现象,通常车辆在持续直行1 min 左右即可恢复。EPS 系统角度中点自动修正功能是不断重复地采样和记录,并滚动修正的,能使EPS 系统角度中点始终保持与车辆角度零点吻合,可使各种补偿功能充分发挥作用;可信的角度检测能力有助于继续开展主动回正和主动阻尼等功能的深入研究。针对回正补偿和阻尼补偿,需进行匹配组合,并经整车调校,才能实现EPS 系统良好的回正性能;同时,文章所提供的阻尼补偿功能,可使车辆在不平路面高速行驶时,具有抑制中位冲击的能力。
猜你喜欢
数学物理学报(2021年3期)2021-07-19 06:02:32
数学年刊A辑(中文版)(2021年2期)2021-07-17 08:38:02
数学物理学报(2021年2期)2021-06-09 08:54:38
汽车维护与修理(2018年1期)2018-04-04 01:13:22
中学生数理化·高一版(2017年3期)2017-07-08 11:55:27
数学物理学报(2016年6期)2016-04-16 04:41:06
火控雷达技术(2016年1期)2016-02-06 02:18:01
中国铁道科学(2015年4期)2015-06-21 06:46:06
汽车维护与修理(2015年5期)2015-02-28 12:16:34
警察技术(2015年6期)2015-02-27 15:38:33
