
深海海底反射区声场角谱域分布结构分析及在声纳波束俯仰上的应用*
2020-06-30 12:12韩志斌彭朝晖刘雄厚
物理学报 2020年11期
韩志斌 彭朝晖 刘雄厚
1) (中国科学院大学, 北京 100049)2) (中国科学院声学研究所, 声场声信息国家重点实验室, 北京 100190)3) (中国人民解放军92578部队, 北京 100161)4) (西北工业大学航海学院, 西安 710129)(2019 年10 月29日收到; 2020 年3 月31日收到修改稿)
深海海底反射区的声场干涉导致能量起伏, 存在不连续的若干声纳可探测区. 主动声纳探测海底反射区目标时, 必须建立起声纳可探测区与波束俯仰角间的量化关系, 通过合理选择最优发射波束俯仰角, 才能使其对准声纳可探测区. 本文通过理论分析和数值仿真, 指出海底反射区离散的声纳可探测区的形成与不同掠射角声线能量周期性起伏直接相关, 当主动声纳波束俯仰角与某个声线能量峰值对应的出射角一致时, 可保证在一个对应的声纳可探测区内获得高的发射阵增益. 在此基础上, 通过声线干涉理论建立了声线能量峰值和出射角的量化关系, 并提出一种脉冲串信号形式, 包含多个可对准各声线能量峰值的子脉冲, 每个子脉冲可保证照射到一个声纳可探测区, 整个脉冲串发射时可在海底反射区的全部声纳可探测区内均取得高的发射阵增益. 经仿真验证, 该方法探测效果好, 稳健性高, 具有良好的应用前景.
1 引 言
低频主动声纳在深海可利用表面波导模式、会聚区模式、海底弹射模式对目标进行探测. 在深海声影区内, 当不存在表面波导时, 低频主动声纳需要采用海底反射工作模式, 通过波束“指向性”俯仰发射, 将声能打向海底, 反射至影区, 以探测到该区域内的目标[1]. 海底反射区内的声场干涉引起声场能量起伏变化[2,3], 导致声纳仅在若干能量较高的离散区域上可探测到目标; 不同可探测区内声波的波达角各异, 仅当声阵发射声波到达目标的角度与某一区域波达角相同时, 才能保证在该区域内获得最大的发射阵增益. 传统的主动声纳在深海使用时, 采用固定的某个角度进行波束俯仰发射, 由于难以对准不同可探测区的声波波达角, 导致难以发挥最大探测效能[4].
解决声纳最优波束俯仰角问题的理想方法是通过深海海底反射区的声场干涉机理分析, 量化建立起几个能量较高的声纳可探测区与声源波束俯仰角间的对应关系. 在深海声场干涉结构研究方面, 俄罗斯研究人员首先在深海实验中观测到稳定的、可预测的宽带声源干涉结构[2]; 翁晋宝等[3,5]利用射线理论分析了深海直达声区、影区和会聚区的干涉结构, 并将其应用于海底声学参数反演;Harrison[6]利用本征声线的到达时间量化分析了不同声速剖面下干涉引起的能量变化与距离的关系.但上述研究均未系统地建立起海底反射区高能量区域与波束俯仰角间的量化关系, 无法为具体的声纳运用提供支撑.
本文的声场仿真和理论分析结果表明, 深海海底反射区不同距离上的能量起伏与不同出射角声线的能量起伏直接相关; 而出射角相同的声线相互干涉是引起上述声场能量随声线出射角起伏变化的主要原因. 我们给出了海底反射区的声纳可探测区与声线出射角的量化对应关系, 并通过声场仿真验证了该量化关系的准确性. 在此基础上, 提出一种针对深海海底反射区的主动声纳脉冲串信号设计方法, 首先快速预报几个可对准不同声纳可探测区的出射角, 以这些出射角作为子脉冲的发射俯仰角, 形成组合脉冲串信号发射. 仿真结果表明: 这种组合脉冲串在深海海底反射区获得的发射阵增益高, 且环境适应性好, 具有良好的应用前景.
2 深海海底反射区声场角谱域干涉结构分析
2.1 深海海底反射区能量起伏的原因--不同出射角声线的能量起伏
在水平不变波导中, 根据简正波理论[7-9], 声场由各阶简正波叠加而成, 即
其中 P (r,z0,zr,ω) 表 示角频率为 ω 、距离为r、声源深度为 z0和接收深度为 zr时的声压,ρ (z0) 为声源处 的 介质 密 度,krm和 ψm(z,ω) 别 为 简 正 波 的 第m阶模态的本征值和本征函数, 且 krm=μm+jβm(通常 μm≫βm),μm是简正波的水平波数,βm是简正波的衰减系数. M为波导中有效传播的简正波模态数. 取声源频率100 Hz, 声源深度为50 m,海深为5000 m, 在典型深海Munk声道条件下(取混合层深度为0 m, 声道轴深度为1000 m), 计算得到声传播损失随距离和接收深度变化情况如图1所示.
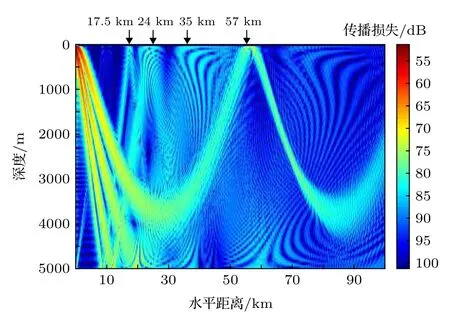
图 1 典型深海Munk声道下声传播损失随距离和接收深度变化情况Fig. 1. Transmission loss variety with the change of distance and receiver depth in Munk sound channel.
从图1声传播损失随距离的变化情况看, 深海低频声场存在明显的直达声区、海底反射区和会聚区. 15—60 km为海底反射区和会聚区, 该距离范围内能量呈现明显的亮暗相间变化. 15—50 km的海底反射区包含以17.5, 24.0和35.0 km为中心的3个能量较高的区域; 在57 km附近出现第一会聚区. 将接收深度固定为50 m, 绘制声传播损失随距离的变化曲线如图2所示. 假设声纳优质因数(FOM)为85 dB, 定义FOM大于声传播损失的区域为声纳可探测区, 图2中可明显观察到海底反射区的3个声纳可探测区.
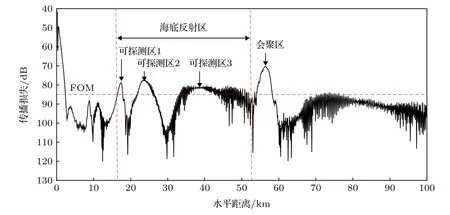
图 2 典型深海Munk声道下接收深度固定时声传播损失随距离的变化Fig. 2. Transmission loss variety with the change of distance in Munk sound channel when the receiver depth is fixed.
广义相积分(WKBZ)理论[10]指出, 声场的简正波和射线模型可实现转换, 简正波模型中的第m号简正波实际上对应了出射角为 φm的本征声线 , 且 φm满足[11-13]

其中 k0=ω/c0,c0为声源处声速. 从声源出射角(即 φm)维度观察图1可知, 随着出射角由小向大变化, 本征声线携带的能量呈现明显的起伏变化,先后出现了4个能量起伏周期, 形成了4个高能量的声线簇. 深海海底反射区的若干离散高能量区,与不同出射角声线的能量起伏直接相关. 利用(1)式和(2)式将简正波号数m转化为声线出射角φm, 并 定 义 出 射 角 φm的 声 线 携 带 的 能 量 为 第m 号简正波的相对强度 | Am| , 且
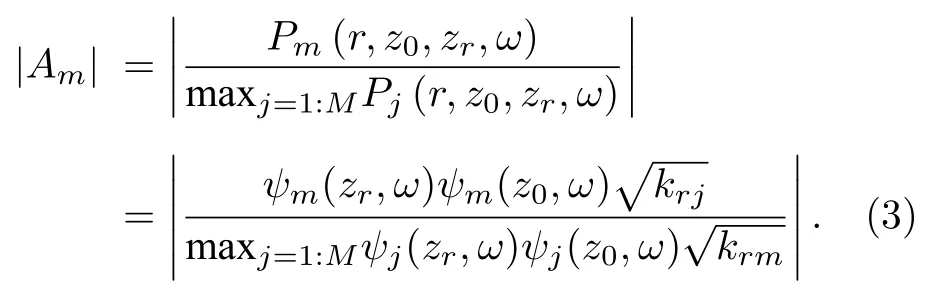
在图1和图2计算条件下绘制本征声线 φm- |Am|曲线, 如图3所示, 该曲线称为声场的角谱域分布[14],该分布图可以量化反映不同出射角本征声线能量的变化. 从图3中可以看到, 声线能量在出射角0°—9.5°(对应1—120阶简正波), 9.5°—18.2°(对应121—126阶 简 正 波), 18.2°—27.6° (对 应217至314阶 简 正 波)和27.6°—31.7° (对 应315至354阶简正波)存在4个周期的起伏变化.
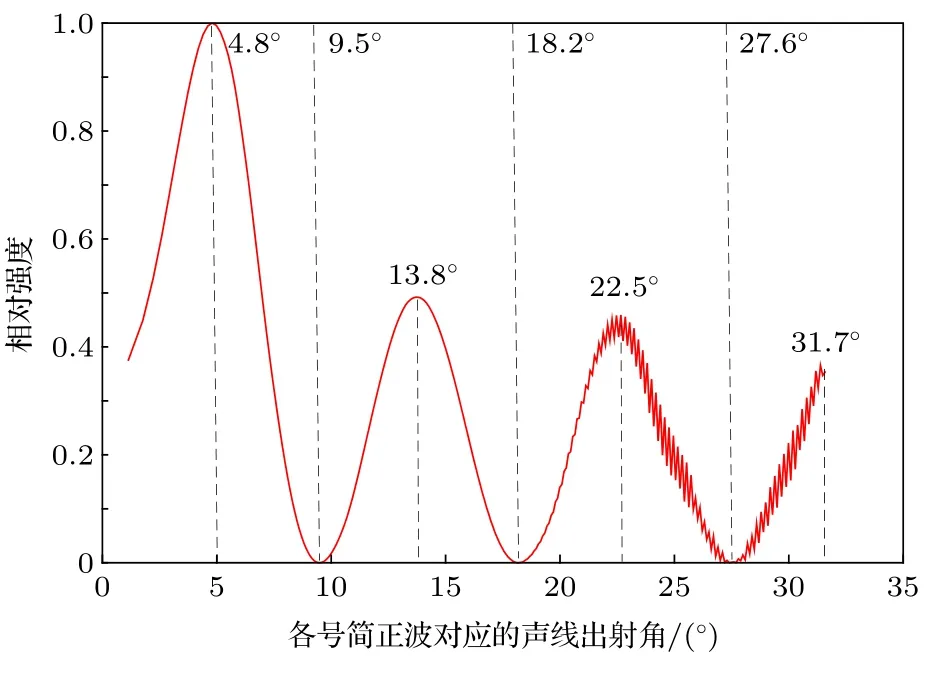
图 3 典型深海Munk声道下声场的角谱域分布Fig. 3. Acoustic field distribution of angle dimension in Munk sound channel.
根据声场角谱域分布图将1—120阶(出射角0°—9.5°声线), 121—216阶(出射角9.5°—18.2°声线), 217—314阶(出 射 角18.2°—27.6°声 线),315—354阶(出射角27.6°—31.7°声线) 4簇简正波(或声线)分别叠加形成声场, 如图4所示.
将图4与图1对比可知, 海底反射区的3个高能量区域和第一会聚区实际上是由不同声线簇作用形成. 出射角在0°—9.5°内的第一个声线簇出射角小, 以反转声线为主, 其能量叠加形成了57 km处的第一会聚区; 出射角在9.5°—18.2°,18.2°—27.6°和27.6°—31.7°的2—4簇声线簇为海底反射声线, 分别在海底反射区内形成以17.5,24和35 km距离为中心的三个可探测区.
定义声场角谱域分布图上两个相邻谷值之间的部分为1簇声线簇, 则声场角谱域分布结构可用N簇声线簇描述, 其中第i簇声线簇的起始掠射角为 φis, 终止掠射角为 φie, 能量峰值对应的掠射角为 φim. 当波束俯仰角与第i簇声线簇能量峰值对应的掠射角 φim相同时, 可保证发射波束经海底反射后对准海底反射区的第i个声纳可探测区, 在该区域内获得高发射阵增益. 因此, 对深海声场角谱域分布结构的预报是研究声纳最优波束俯仰角问题的物理基础.
2.2 深海声线簇形成机理及声场角谱域分布结构预报
2.2.1 深海声场角谱域分布结构理论表达式推导
角谱域上掠射角为 φm的声线对应的强度值相当于BR和SBR两种本征声线路径强度的相干叠加 , 其声压表达式为[15,16]
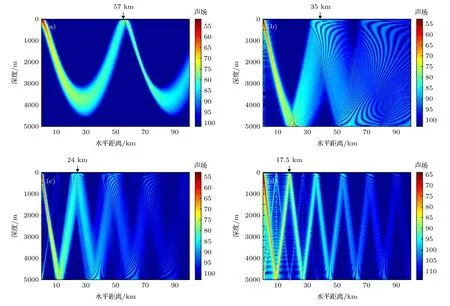
图 4 不同简正波(声线)簇形成的声场 (a) 1—120阶简正波(出射角0°—9.5°的声线)叠加声场; (b) 121—216阶简正波(出射角9.5°—18.2°的声线)叠加声场; (c) 217—314阶简正波(出射角18.2°—27.6°声线)叠加声场; (d) 315—354阶简正波(出射角27.6°—31.7°声线)叠加声场Fig. 4. Acoustic field formed by different normal mode (ray) clusters: (a) Acoustic field formed by normal mode 1 to normal mode 120 (rays with emanating angle from 0° to 9.5°); (b) acoustic field formed by normal mode 121 to normal mode 216 (rays with emanating angle from 9.5° to 18.2°); (c) acoustic field formed by normal mode 217 to normal mode 314 (rays with emanating angle from 18.2° to 27.6°); (d) acoustic field formed by normal mode 315 to norm al mode 354 (rays with emanating angle from 27.6° to 31.7°).
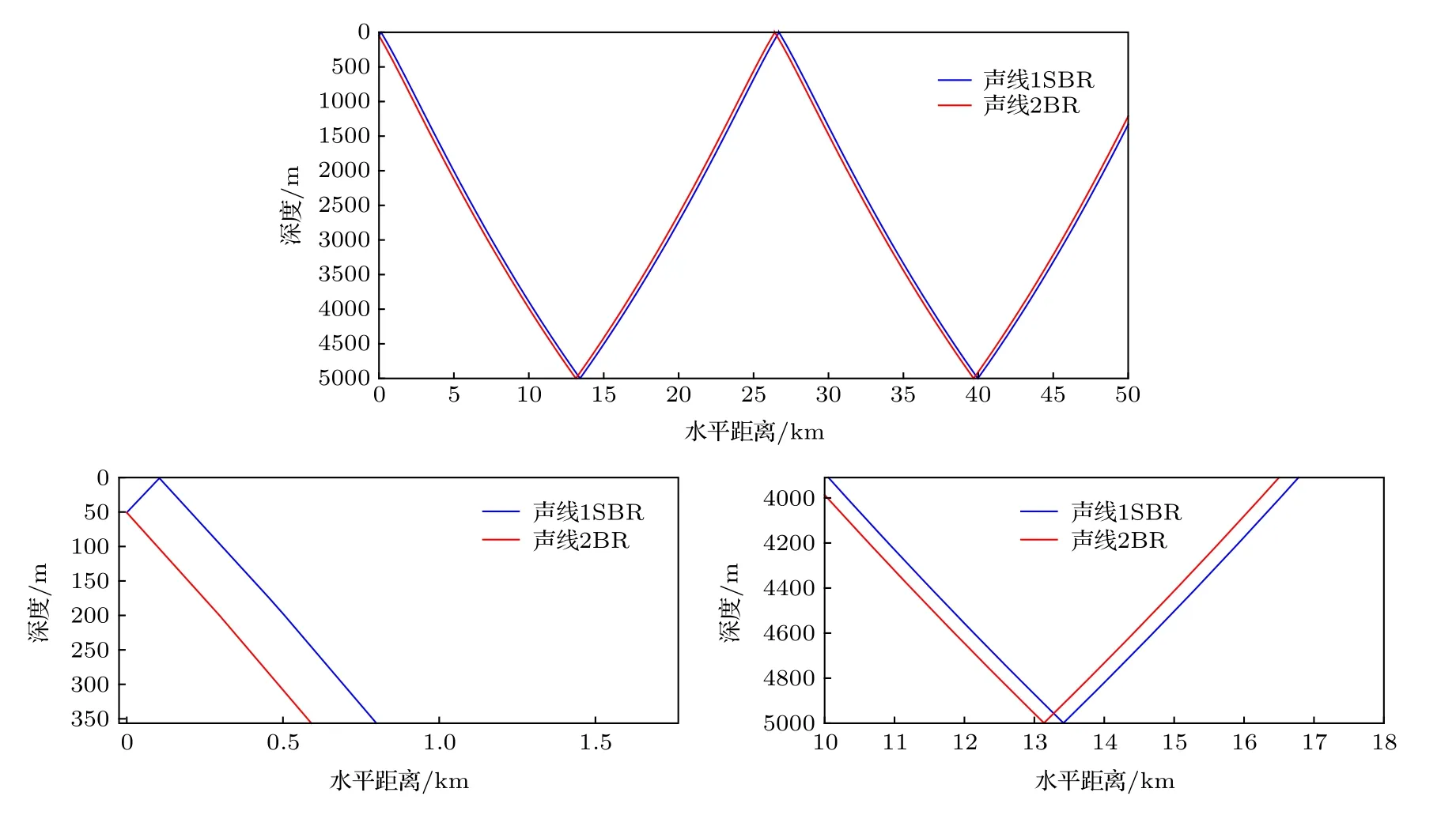
图 5 角谱域上20°掠射角对应的两种声线示意图Fig. 5. Sketch map of two types of rays with the value of 20° in angle dimension.
其中 l =1,2 分别对应于BR, SBR两条本征声线;Al(r,z) 为 第l条声线的声压振幅,(r,z) 表示接收器的位置坐标; Vsl,Vbl分别为第l条声线的海面和海底复反射系数; f为声源频率,tl为第l条声线到达接收器的传播时间. 由于两种路径本征声线均经历一次海底反射(或反转), 且其声压振幅和海底反射系数近似相等; 考虑到海面复反射系数的模等于 1, 反射相移为π, 则(4)式可近似为

式中,Δ t12为BR, SBR两条本征声线的时延差.本征声线的传播时间为其经过程函 ξ (r,z) 所需要的时间, 程函可以表示为水平分量 ξ1(r) 和垂直分量 ξ2(z) 的和[17], 即

其 中 ξ1(r) 和 ξ2(z) 可分别表示为[17]:
式中 n (z) 为折射率且 n (z)=c0/c(z), 其 中 c0为声源处声速,c (z) 为在深度z上的声速,z0为声源深度, H为海深. 根据(7)式和(8)式, BR, SBR两条本征声线的程函的水平分量 ξ1(r) 项相等, 因此声线的时延差可以表示为两条本征声线垂直分量ξ2(z) 所产生的时延差, 即
在海底反射区 φm较大,c osφm≪1 ,n (z)≫cosφm,可近似为1, (9)式可简化为

将(5)式和(10)式代入(3)式, 得到深海声场角谱域分布结构的近似表达式为
其中 δm表示第m条本征声线的声压振幅与强度最大 的本征声线的声压振幅的比值, 且

分析(11)式和(12)式得到, 随着初始掠射角 φm发生变 化,和均 会 发 生 振荡变化, 使得强度发生振荡变化, 声场角谱域分布呈现出起伏现象.是随φm变化的快变项, 其大小和声源频率f、声源深度z0、声源处声速 c0相关, 对声场角谱域分布结构变化 起 主 导 作 用; δm是 随 φm变 化 的 缓 变 项, 其 大小和水文条件、海深等相关, 对声场角谱域分布结构变化起次要作用. 理论上可采用快变项预报声场角谱域分布结构.
2.2.2 关于预报结果的讨论与误差分析
下面重点讨论各条件要素对声场角谱域分布结构的影响, 同时采用(11)式中的快变项进行分布结构预报的精度.
1)声源频率与声源深度等声阵参数变化对声场角谱域分布结构的影响及预报误差分析
声源频率与声源深度等声阵参数变化时, 主要通过影响快变项, 进而影响声线簇角谱域分布结构. 在典型深海Munk声道下(海深5000 m, 声道轴深度1000 m, 混合层深度0 m), 分别取声源频率变化(100, 200和300 Hz)、声源深度变化(30, 50和80 m), 利用WKBZ求解声场的简正波解并绘制声场角谱域分布结构, 和本文的预报结果比较, 如图6和图7所示.

图 6 声源频率变化时声场角谱域分布WKBZ仿真结果与理论预报结果比较(声源深度50 m) (a) 100 Hz; (b) 200 Hz;(c) 300 HzFig. 6. Comparison of WKBZ simulation and theoretical prediction about acoustic field distribution of angle dimension when source frequency varies (source depth is 50 m):(a) 100 Hz; (b) 200 Hz; (c) 300 Hz.
从仿真结果和计算结果可以看出, 声线簇分布结构受声源频率f和深度 z0影响明显, 随着f增大和 z0增加, 声线簇数目逐渐变多, 声线簇宽度被压缩变窄. 该现象的物理解释为, 声线簇宽度为 |Am|上相邻两个零点(极小值)之间的距离, 且零点位置满足

随着声源频率f和声源深度 z0的增大,中相邻两个零点距离变小, 出现上述现象.
在设定的水文条件下, 以100 Hz声源为例,在30, 50和80 m深度上对应的声线临界掠射角分别为10.2°, 10.8°和11.3°, 当声线掠射角大于临界掠射角时, 对应海底反射区声线, 反之则对应会聚区的反转声线. 由图6和图7可得, 预报方法对海底反射区声场角谱域分布结构预报结果与实际仿真结果基本一致(注: 本文方法只预报声线簇的起伏周期、峰值位置、谷值位置等, 不预报相对强度数值). 值得注意的是, 对于小于临界掠射角的会聚区声线簇, 理论预报结果与实际仿真结果存在差异, 这是由(9)式推导(10)式过程中的近似计算引起的. 对于掠射角 φm较小的声线, (9)式项中的 c os2φm接近于1, 与 n2(z)取值接近, 此时 n (z) 不可再近似为1, 故理论预报结果与实际产生误差.
2)水文条件、海深等外部环境条件变化对声场角谱域分布结构的影响及预报误差分析
设定声源频率和深度分别为100 Hz, 50 m, 以典型深海Munk声道(海深为5000 m, 声道轴深度为1000 m, 不存在混合层)为基准, 分别令平均主跃层声速梯度从0.01 —0.05 /s变化、声道轴深度在800—1200 m变化、海深在3000—5000 m变化, 利用WKBZ模型仿真绘制声场角谱域分布,和本文的预报结果(用快变项预报)比较, 如图8—图10所示.
从仿真结果看, 由于缓变项 δm对整体分布结构贡献有限, 声场角谱域分布结构受水文条件、海深等外部环境条件的影响较小. 在图8—图10的各类环境条件变化时, 海底反射区的声线簇峰值、谷值的最大偏移不超过0.4°, 且预报结果与实际值误差最大不超过0.4°.
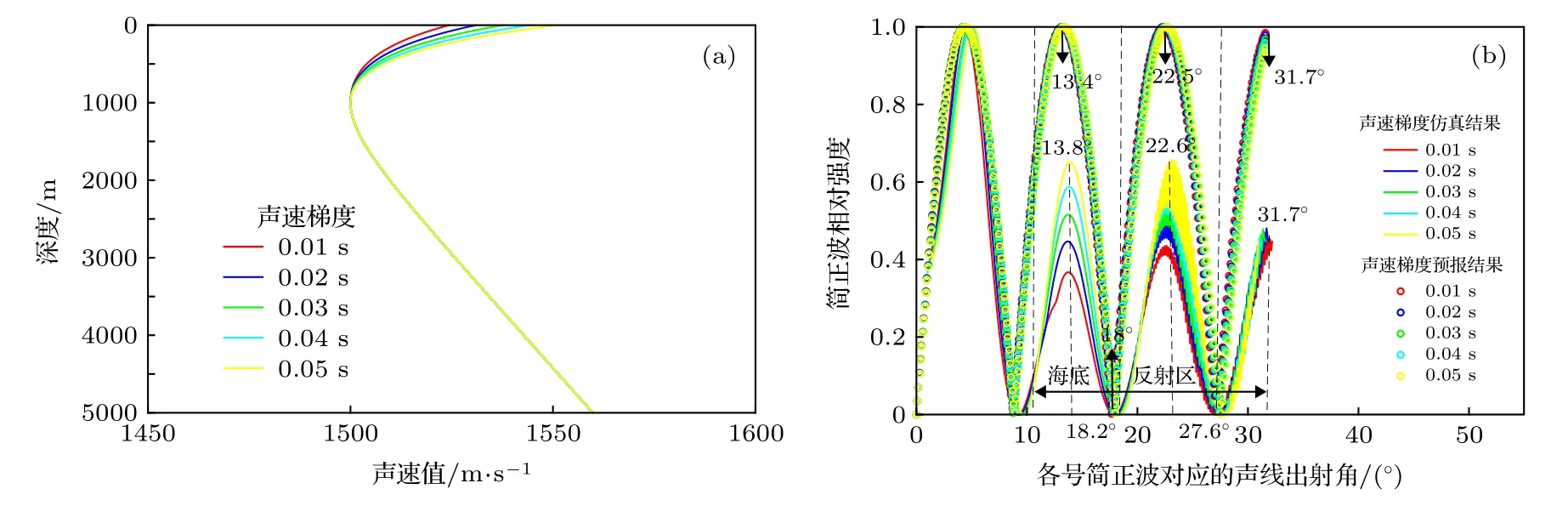
图 8 声速梯度变化时声场角谱域分布WKBZ仿真结果和理论预报结果比较 (a) 不同跃变层声速梯度下声速剖面; (b) 结果比较Fig. 8. Comparison of WKBZ simulation and theoretical prediction about acoustic field distribution of angle dimension when sound velocity gradient varies: (a) Sound velocity profiles when sound velocity gradient varies; (b) comparison of results.

图 9 声道轴深度变化时声场角谱域分布WKBZ仿真结果和理论预报结果比较 (a)不同声道轴深度下声速剖面; (b) 结果比较Fig. 9. Comparison of WKBZ simulation and theoretical prediction about acoustic field distribution of angle dimension when channel axis depth varies: (a) Sound velocity profiles when channel axis depth varies; (b) comparison of results.
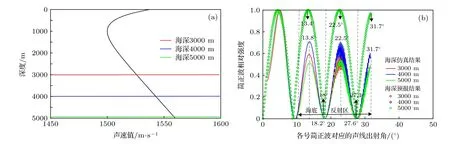
图 10 海深变化时声场角谱域分布WKBZ仿真结果和理论预报结果比较 (a)不同海深下声速剖面; (b)结果比较Fig. 10. Comparison of WKBZ simulation and theoretical prediction about acoustic field distribution of angle dimension when sea depth varies: (a) Sound velocity profiles when sea depth varies; (b) comparison of results.
3 声场角谱域分布结构预报在波束俯仰上的应用分析
3.1 一种基于声场角谱域分布结构的主动声纳脉冲串信号设计
对于N元、阵元间隔为s的垂直阵, 常规波束形成方法通常选用权矢量对各阵元信号进行加权补偿后发射[18], 其中 θc为波束形成扫的扫描角度, 通常由人工设置为固定的某个角度; cf为参考声速, 通常取cf=c0. 在深海实际海洋信道下, 垂直阵常规波束形成方法的发射阵增益 Gcbf可表示为(详细推导参见附录)
式中,S NRout为垂直阵的N个阵元发射的声信号经波束形成后在距离r上的信噪比; S NRin为各阵元发 射的声信号在距离r上的平均信噪比. 其中幅度项
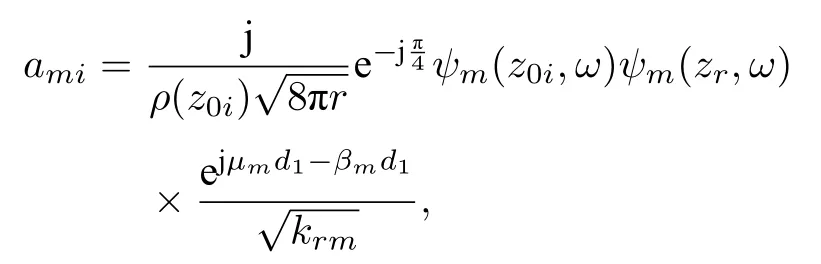
|ami| 表示第i个阵元到达距离r的第m号简正波的幅度,z0i表示第i个阵元的深度,d1为垂直阵第1个阵元到距离r处目标的距离. 相位项bmi=ejs(i-1)φmi, 且 φmi=ωsinθc/cf-μmsinθsi,其中,θsi为从第i个阵元到达距离r处目标的声线的出射角. 由(14)式可知, 为获得高的垂直阵发射阵增益, 须满足相位项 bmi=1, 即 φmi=0 . 因此,必须使得参考声速 cf=ω/μm, 且波束形成的扫描角度 θc=θsi. 当常规波束形成方法的参考声速 cf与 ω /μm存在差异, 且扫描角度 θc未能对准出射角θsi时, 会产生垂直阵阵增益下降现象. 由第2节分析可知, 深海声场由于角谱域上的多个声线簇作用, 引起海底反射区出现多个声纳可探测区, 且不同声纳可探测区对应的水平波数 μm与声线出射角θsi均不相同. 采用传统的单脉冲信号, 设置固定的参考声速 cf和固定的扫描角度 θc, 只能“照射”到一个区域, 不能兼顾对所有声纳可探测区的高增益探测.
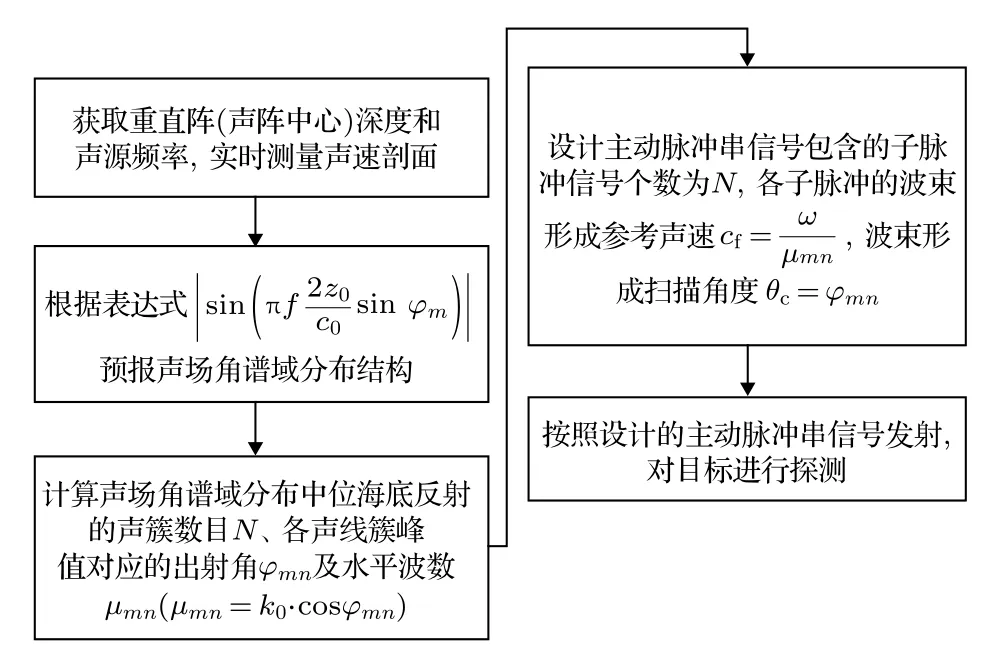
图 11 基于声场角谱域分布结构的主动声纳发射脉冲串信号设计Fig. 11. Pulse signal design of active sonar based on acoustic field distribution of angle dimension.
因此, 主动声纳发射时, 需采用含多个子脉冲的脉冲串信号, 根据对每个声纳可探测区内主导简正波和声线(即声场角谱域分布中声线簇峰值对应的简正波和声线)的水平波数、声线出射角估计结果合理设置每个子脉冲的参考声速 cf和波束形成扫描角度 θc, 保证每个子脉冲信号可“照射”一个声纳可探测区, 整个脉冲串可实现海底反射区所有声纳可探测区的主动高增益探测. 脉冲串信号设计需在声场角谱域分布结构预报的基础上展开, 具体方法如图11所示.
3.2 脉冲串信号探测效果分析
假设低频声纳主动发射阵为垂直阵, 工作频率为100 Hz, 阵元数为10, 声源阵中心深度为60 m;声纳工作海域海深为5000 m, 水文条件为典型深海Munk声道, 其中混合层深度为0 m, 声道轴深度为1000 m.
发射阵分别采用传统的常规波束形成方法和本文3.1节中设计的脉冲串信号发射. 在常规波束形成方法中, 参考声速取垂直阵中心处海水声速1531.4 m/s, 并随机设置波束俯仰角分别采用10°和20°两种固定角度发射. 在运用脉冲串信号发射方法时, 首先根据(11)式计算得到的声场角谱域分布结构如图12所示. 在仿真选取的水文条件下, 声线反转-海底反射的临界掠射角为10.96°, 海底反射区存在4个大于临界掠射角的声线簇, 对应的峰值位置的声线掠射角分别为11°, 18.8°,26.6°和33°, 代入(2)式计算得到其对应的简正波的水平波数分别为0.4028, 0.3884, 0.3669和0.3441, 因此可为垂直阵设计一种含4个子脉冲的脉冲串信号, 每个子脉冲根据 cf=ω/μm将参考声速设置为1559.9, 1617.7, 1712.5和1826.0 m/s,波束扫描角度分别取11°, 18.8°, 26.6°和33°.
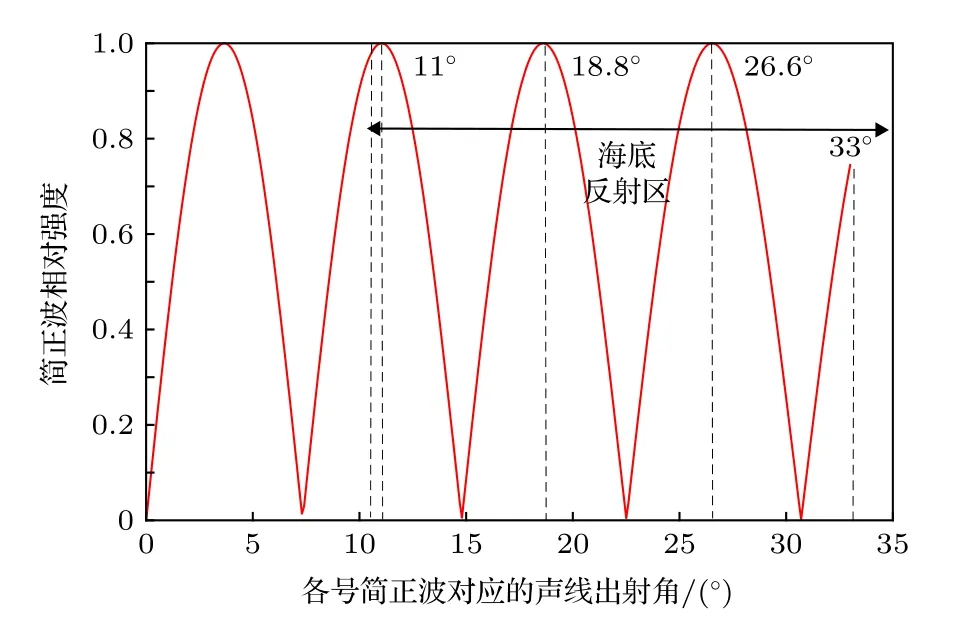
图 12 声场角谱域分布结构Fig. 12. Acoustic field distribution of angle dimension.
利用(14)式分别计算垂直阵采用常规波束形成方法和本文脉冲串信号发射方法时在海底反射区不同距离上取得的阵增益, 结果如图13和表1所列.
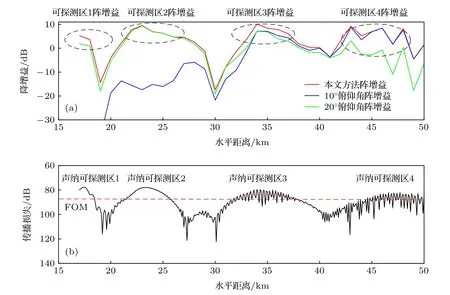
图 13 本文方法和随机设置方法阵增益比较 (a) 不同方法阵增益比较; (b) 声传播损失及声纳可探测区分布情况Fig. 13. Array gain comparision between method of this article and the method of random setting: (a) Array gains of different methods; (b) transmission loss and distribution of detectable areas.

表 1 本文方法和传统随机设置波束俯仰角方法阵增益比较数据表Table 1. Array gain comparison data form between method of this article and the method of random setting.
图13(a)中蓝线和绿线分别表示发射垂直阵随机设置波束俯仰角为10°和20°时在海底反射区不同距离上的发射阵增益, 红线表示垂直阵采用本文方法设计的脉冲串信号在海底反射区不同距离上的发射阵增益; 图13(b)为采用WKBZ模型仿真得到的海底反射区不同距离上的声传播损失及声纳可探测区分布情况. 对比图13(a)与图13(b)可知, 常规波束形成方法采用10°的波束俯仰角发射时, 由于该角度接近第4声纳可探测区对应的声线簇峰值11°, 在该可探测区取得的发射阵增益最高; 当目标距离由第4声纳可探测区向第3, 2,1声纳可探测区变化时, 由于波束俯仰角与可探测区对应的声线簇峰值差异逐渐变大, 发射阵增益呈递减趋势. 同理, 采用20°的波束俯仰角发射时, 由于俯仰角与第2可探测区对应的声线簇峰值18.8°接近, 阵增益较高, 在其他可探测区阵增益下降明显. 而采用本文方法的脉冲串信号发射时, 由于4个子脉冲可分别较为精确地对准各声纳可探测区的声线簇峰值, 且参考声速取值更为准确, 在4个声纳可探测区内的发射阵增益均优于传统的随机设置波束俯仰角的方法.
由表1可知, 采用本文方法设计的脉冲串信号发射, 在可探测区1, 2, 3, 4内的阵增益分别比10°俯仰角下的阵增益提高14.9, 20.0, 2.0, 1.0 dB,平均阵增益提高8.8 dB; 分别比20°俯仰角下的阵增益提高2.8, 0.3, 2.2和6.8 dB, 平均阵增益提高3.1 dB.
4 结 论
深海海底反射区存在若干离散的高能量区域(即声纳可探测区), 主动声纳实现海底反射工作模式的关键是通过合理选择最优波束俯仰角, 使得声波照射到这些区域. 本文通过对深海海底反射区声纳可探测区产生机理研究, 提出声场角谱域分布结构理论, 推导了声纳可探测区与波束俯仰角的量化关系, 据此设计了一种主动脉冲串信号形式, 实现了对海底反射区多个声纳可探测区的高发射阵增益探测, 主要结论如下:
1) 深海海底反射区存在的若干离散的声纳可探测区是由声源处不同出射角声线能量周期性起伏导致的;
2) 深海声场干涉效应是导致深海声线能量集中在某几个出射角上的主要原因, 这种现象称为声线簇现象, 当主动声纳波束俯仰角对准声线簇峰值时, 可保证在声纳可探测区阵增益最高;
3) 声线簇在角谱域上的分布结构(包括峰值、谷值位置等)仅与声源频率、深度相关, 与水文条件和海深等外部环境条件无关, 可用公式预报;
4) 主动声纳在海底反射工作模式下, 可采用一种包含多个子脉冲的脉冲串信号形式发射, 通过每个子脉冲对准一个声线簇的峰值照射一个高能量区域, 整个脉冲串可实现同时对全部海底反射区的高阵增益主动探测.
通过与WKBZ理论仿真结果比对, 本文的声场角谱域分布结构预报方法具有较高的准确度和环境适应性; 经对主动声纳探测效果仿真, 设计的脉冲串应用于深海海底反射区目标探测时, 可使发射波束同时精确地对准多个声纳可探测区, 进而比传统的随机设置波束俯仰角方法获得更高的发射阵增益, 具有良好的探测效果和工程应用前景.
附录
对于N元、阵元间隔为s的垂直阵, 在空间某个距离r上的发射阵增益 Gcbf可表示为垂直阵的N个阵元发射的声信号经波束形成后在距离r上的信噪比 S NRout与各阵元发射的声信号在距离r上的平均信噪比 S NRin的比值的对数, 即

假设波束形成权矢量 W =[w1,w2,···,wN]T, 且第i个阵元的波束形成加权系数为

其中 cf为参考声速, 常规波束形成通常将参考声速 cf设置为声源处声速 c0,θc为波束形成扫的扫描角度. 实际海洋信道下, 假设噪声之间相互独立, 且噪声与信号之间相互独立, 各阵元发射信号 s0(ω) 经波束形成加权后到达目标处的 信号 X (ω) 可表示为[19]
其中E表示求期望,ni(ω) 为距离r上各阵元的噪声信号,pi为各阵元到距离r处目标的海洋信道传递函数矢量, 且有
(A4)式中, M为波导中有效传播的简正波模态数,krm和ψm(z,ω) 别为简正波的第m阶模态的本征值和本征函数,且 krm=μm+jβm(通常 μm≫βm),μm是简正波的水平波数,βm是简正波的衰减系数. z0i为垂直阵第i个阵元的深度,di是垂直阵第i个阵元到目标的距离且有di=d1-s(i-1)sinθsi, 其中,d1为垂直阵第1个阵元到目标的距离, s为垂直阵阵元间隔,θsi为由第i个阵元到达接收器位置处的声线的出射角. 考虑远场接收的情况,( A4)式可近似为[20]

其中
| ami| 表示 pi的幅度. 根据(A3)式, N个阵元发射的声信号经 波束形成后在距离r上的信噪比 S NRout可表示为

由于N个阵元中不同阵元发射的声信号在距离r上的功率不同,S NRin用N个阵元发射的声信号在距离r上的平均信 噪比表示, 即

将 (A6)式和(A7)式代入(A1)式, 有
将(A2)式和(A5)式代入(A8)式, 有
其 中 bmi为 相 位 项 且 bmi=ejs(i-1)φ, 且 φ=ωsinθc/cfμmsinθsi.
猜你喜欢
鸭绿江(2022年10期)2022-10-21
火力与指挥控制(2021年8期)2021-09-08
考试与评价·八年级版(2020年5期)2020-10-29
中国舰船研究(2019年2期)2019-04-20
家庭影院技术(2018年11期)2019-01-21
家庭影院技术(2018年10期)2018-11-02
家庭影院技术(2018年10期)2018-11-02
舰船电子工程(2017年10期)2017-11-28
中国舰船研究(2017年4期)2017-08-05
优雅(2017年3期)2017-03-09
