
反潜巡逻机与无人艇应召反潜中协同声纳搜潜研究
2021-09-08 12:09潘宣宏
火力与指挥控制 2021年8期
潘 磊,潘宣宏
(海军指挥学院,南京 210016)
0 引言
如何能够实现对水下目标的有效探测是研究反潜作战的核心内容。而随着主动降噪、无人潜航器、AIP 推进、水下网络等新技术、新装备的应用,水下作战平台隐蔽性不断提升,以往单平台、单声纳、以被动探测为主的水下搜潜方式越来越难以应对。近年来,随着人工智能、高性能传感器与宽带数据链等技术的进步,新型无人艇逐步体现出优异的反潜作战能力,未来将在反潜作战中发挥重要作用。利用反潜巡逻机与无人艇的作战能力互补性,开展两者的协同反潜作战行动可以显著提高反潜作战效能。因此,针对反潜巡逻机与无人艇协同声纳搜潜,对其运用过程、实施方式与平台航路规划进行预先研究,对提高反潜作战能力具有前瞻性与现实意义。本文针对应召反潜作战中的行动特点,提出反潜巡逻机与无人艇协同使用声纳设备,实现多基地声纳搜潜的方法,并对其中涉及到的重要参数间关系、应用实例进行了分析。
1 反潜巡逻机与无人艇协同声纳搜潜可行性分析
1.1 反潜巡逻机与无人艇的声纳搜潜能力互补性分析
对反潜巡逻机与无人艇的反潜能力互补性进行分析,首先要对两者的声纳装备特性与平台特性进行对比,再找出此弱彼长之处,通过战术设计使两者能力互补,发挥协同交战的优势。
与协同声纳搜潜相关的反潜巡逻机与无人艇特性对比主要涉及以下几个方面:平台续航能力,平台机动能力,声纳持续工作时间,声纳探测能力,受威胁性。平台续航能力方面,反潜巡逻机的续航时间较长,普遍能够达到8 h 以上;无人艇最长能够在海上连续部署90 d,有极长的续航时间[1]。平台机动能力方面,反潜巡逻机的巡航速度在400 km/h以上,能够迅速到达作战区域;无人艇虽然区域机动性不足,但可以保持拖曳声纳使用所需的较低航速。声纳持续工作时间方面,机载被动声纳浮标能够持续工作6 h~8 h,主动声纳浮标仅能工作2 h~3 h,且机载声纳浮标为消耗品携带数量有限;无人艇搭载的双波段声纳能够持续工作较长时间,基本只受到装备连续工作时限的限制。声纳性能方面,机载被动声纳的探测距离最大为10 km 左右,但能够通过合理布设来弥补探测距离的不足;无人艇载拖曳声纳有效探测距离在30 km 左右[2]。
从反潜巡逻机与无人艇的特性对比来看,反潜巡逻机使用灵活,区域覆盖范围广,但持续作战能力与单元水声探测能力较弱,无人艇可以保持前沿长期存在,与高性能声纳装备相结合能够发挥极强的跟踪能力,但其区域快速覆盖能力不足,应对突发情况不够灵活。反潜巡逻机与无人艇在平台特性与声纳装备特性上有较强的互补性,具备实施协同作战的理论依据与基础。
1.2 反潜巡逻机与无人艇的协同能力分析
反潜巡逻机装备了多种探测设备,能够对较大范围的海区与中低空区域进行态势感知与侦察监视;新型反潜巡逻机平台除了传统的短波/超短波、战术数据链、卫通等通信手段外,还加装了宽带数据链,能够直接参与无人作战平台的数据读取与控制引导。这使得反潜巡逻机可以通过数据链通信、实时监控等手段全面掌握无人艇的运行情况,便于实施有效协同。新式中型反潜无人艇智能化水平较高,不需要人在回路全程控制,可以节省宝贵的通信带宽资源分配给目标与协同信息的传输;出于海上长时间部署的需要,中型反潜无人艇装备了较为齐全的通信设备,能够通过多种手段保障上下行通信的畅通。
在信息化条件下,反潜巡逻机与无人艇都将被融入到海上作战体系中,未来在实现了整个体系内互联互通、态势共享的基础上,反潜巡逻机与无人艇的协同搜潜行动将成为整个协同交战的一部分,得到整个作战体系的支持。
1.3 双基地声纳基本原理与实现条件
反潜巡逻机与无人艇协同实施声纳搜潜行动的基础是构建有效的双基地声纳系统,实现扩展区域的水下探测。双基地声纳通过声纳信号双基地收发分置,获得相较于收发合置的单声纳系统更远的探测距离;而且声纳信号的收发分置也便于声纳信号数据的接收与分析。一般的双基地声纳配置如图1 所示[3]:T/R 为声源,向水中发射声波;R 为被动声纳浮标,为了充分发挥双基地声纳的性能,采用定向被动声纳浮标,通过单组双基地声纳系统就可获得目标位置信息。S 为可疑水下目标;D 为主动辐射源与接收基地连成的基线长度;RT、RR分别为声源、接收基地与目标间的距离。通过声源与接收设备时间同步后,信号延时之和R∑是可以通过测量收发时延得到的。相应的在二维双基地平面内,具有相同R∑的目标轨迹集合构成等时到达椭圆。结合定向被动声纳测得的目标反射声波的方向,可以解算出可疑目标的位置信息。

图1 双基地声纳基本原理图
根据文献[4]的论述,双基地声纳的有效探测区域为卡西尼卵形。当主动声源与接收声纳间的距离过远时,双基地声纳探测区域不连续。同时,设置适当的声纳位置距离,能够增强有效探测区域内的声学信号强度,增大对潜艇的发现概率。在确定了双基地声纳等效工作半径(即收发分置的声纳系统等效为收发合置的单基地声纳的工作半径)后,收/发基地间的距离小于等效工作半径的两倍就可以获得连续的探测区域[4]。
双基地声纳等效探测距离是设置双/多基地声纳系统的基础参数。等效探测距离是通过基于能量的双基地声纳方程与球面波衰减关系推导得出的。基于能量的双基地声纳方程可表示为[5]:

其中,SL 为声源级,TLT为声波从声源到目标处的传播损失,TS 为目标的声波反射强度,NL 为环境噪声损失,DI 为接收指向性,DT 为监测阈值,TLR为声波从目标到接收端的传播。按球面波衰减计算并忽略吸收衰减,则有如下数学关系:

2 反潜巡逻机与无人艇应召反潜中协同声纳搜潜过程
反潜巡逻机与无人艇协同声纳搜潜,首先通过被动探测,预测敌方水下目标的机动方式,逐步接近敌方水下目标;再通过突然发起的协同主动声纳探测,增大对敌方潜艇的发现效率,使敌水下目标难以脱离主动声纳探测的不可逃逸区,迅速完成对敌水下目标的精确定位与瞄准,为发起攻潜行动作好准备。协同声纳搜索的流程如图2 所示,作战单元交互关系如图3 所示。行动要点是充分发挥空中平台机动能力强的特点:在无人艇的引导下,反潜巡逻机迅速接近敌水下目标后布设被动声纳浮标,无人艇主动声纳与被动声纳浮标组成探测范围覆盖目标散布区域的多基地声纳系统,恢复与目标信号接触并进行精确定位。

图2 应召反潜中艇-机协同声纳搜潜流程
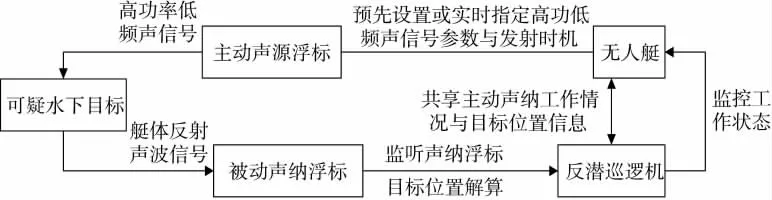
图3 应召反潜中艇-机协同声纳搜潜作战单元交互关系
3 反潜巡逻机与无人艇应召反潜中协同声纳搜潜方式
3.1 目标散布区域分析
由于具有超长的续航能力与持续水下监视能力,无人艇在反潜作战中会被长期部署在前沿,处于水下潜航机动状态的敌方水下目标被无人艇首先发现的可能性较大。当无人艇通过被动声纳发现敌方潜艇时,实际上自身也处于可被敌方潜艇发现的位置。目标在意识到被发现后必定采取减速缓行、下潜、改变航行等措施力图脱离与我方无人艇的信号接触。在水面艇初次发现目标并脱离信号接触到反潜巡逻机布设主动声纳再次探测到目标的时间间隔内,目标位置点会散布在一定区域内。
目标的散布范围与两个方面有关:一是初次发现目标传感器的定位误差;二是由于目标机动造成的目标位置点散布。本文考虑目标在脱离信号接触后航速未知、航向任意且均匀分布时的情况。设初次发现目标位置为P敌潜初(x0,y0),初次发现目标传感器定位误差为σ0,V潜se为目标平均隐蔽巡航速度,t 为初始发现时刻到声纳系统开始工作时刻间的时间间隔。目标最大散布区域为一个以P敌潜初(x0,y0)为圆心、rz=σ0+V潜set 半径的圆形区域[6]。
3.2 多基地声纳系统的构建
通过协同声纳搜潜重新实现与目标的信号接触,要使多基地声纳探测区域将目标散布区域覆盖。要确定主动声纳浮标的布设,首先要根据声纳系统参数与探测条件确定双基地声纳系统的等效声纳探测距离,再根据多基地声纳系统连续有效探测距离,以及随时间变化的目标散布区域来最后确定被动声纳浮标位置,使多基地声纳系统无盲区探测区域有效覆盖目标散布区域[7]。
整个声纳浮标布设筹划如图4 所示:初始发现目标位置为P敌潜初(x0,y0);反潜巡逻机初始位置为P机初(x'0,y'0);无人艇初始位置为P艇初(x0,0);T 为总耗时,反潜巡逻机机动耗时t飞行,浮标布设耗时t布设(T=t飞行+t布设);在声纳浮标开始工作时刻无人艇的坐标为P艇(x0,y'');反潜巡逻机将被动浮标布设在目标散布区域中轴线两侧,图中所示为布设5 部声纳浮标的情况;D 为被动声纳浮标与无人艇的距离。图中连续虚直线所围成的卡西尼卵形线为每组双基地声纳系统的有效探测区域,它们之间的交点与无人艇之间的距离R1为多基地声纳系统无盲区搜索区域半径。如图4 中所示,被动声纳浮标与无人艇组成的以R1为半径、张角为θ总的扇形无盲区探测区域覆盖了目标散布区域。

图4 声纳浮标布设筹划图
3.2.1 无盲区探测区域相关参数计算
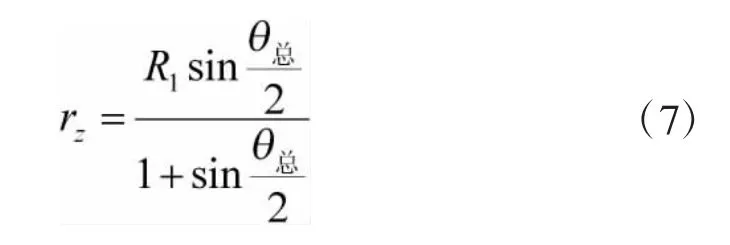
如果要使得多基地声纳系统的无盲区探测区域覆盖目标散布区域,无论θ总如何小、至少要作到图4 中所示的扇形区域两侧边界与目标圆形散布区域相切。可获得几何关系:θ总/2=arcsin[rz/(y0-y'')],y''=V潜seT,整理得:

下面计算需要布设的被动声纳浮标数量,如图5所示。设相邻被动声纳与无人艇连线的夹角为θ,根据文献[8]的论述,θ、R1与D 存在如下几何关系[8]:

图5 被动声纳与无人艇连线夹角示意图
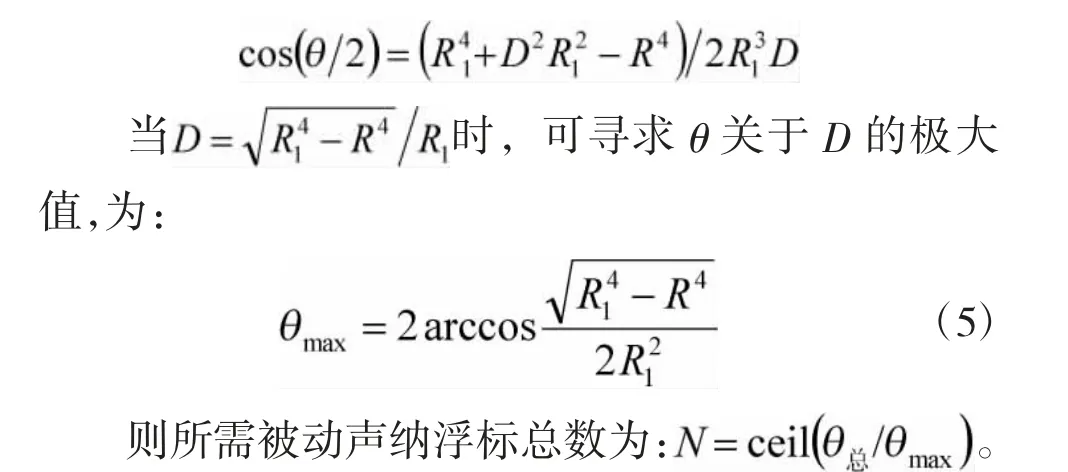
根据声纳浮标的布设数量N 与θmax求解过程,关于N 的计算中涉及到向上取整的过程,那么布设声纳浮标后实际获得的无盲区探测区域张角θ总实际=Nθmax一般大于θ总。在下面的讨论中,θ总实际将被作为最终结果计入多基地声纳系统参数中,θ总则作为中间变量在涉及临界状态与参数上限中运用。
3.3.2 被动声纳浮标布设位置坐标计算
在确定了多基地声纳无盲区探测区域主要参数后,可以求出每个被动声纳浮标的位置坐标。下页图6 所示为声纳浮标布设位置与无人艇监听位置的几何关系:φ1、φ2、… φN为浮标1、浮标2、…浮标N 分别与无人艇位置的连线与水平轴的夹角(图中所示为布设5 部声纳浮标的情况)。根据求得的θmax与所需浮标总数N,可得到以下几何关系并求出声纳浮标布设位置坐标:

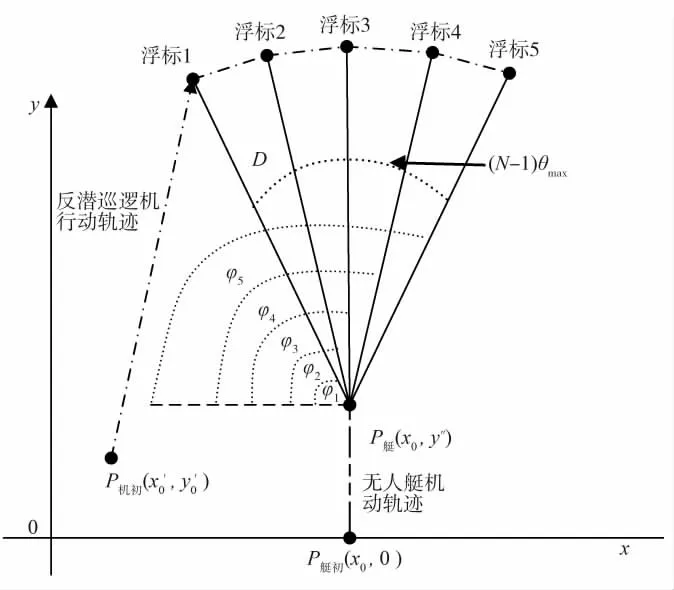
图6 声纳浮标与无人艇相对位置
3.2.3 协同搜潜行动耗时计算
下面讨论反潜巡逻机机动与布设声纳浮标中耗时的计算方法。讨论反潜巡逻机行动总耗时T 的上限。随着T 的不断延长,目标散布区域将持续扩展,当其成为多基地声纳无盲区探测区域的内切圆时可视为临界状态,此时存在如下几何关系:
如果T 继续延长,无盲区探测区域将无法实现对目标散布区域的覆盖。设该临界状态情况下总耗时存在最大值为T最大,由式(4)与式(6)联立可得:

由此可见,当初始条件确定、装备性能已知的情况下,T最大与无盲区探测半径R1具有确定的数学关系。
接着再计算布设声纳浮标耗时t布设。易得t布设=S布设/V机布设(V机布设为反潜巡逻机布设声纳浮标平均速度,为已知)。出于计算方便,将反潜巡逻机布设声纳浮标路径设置为圆弧形,可得:

最后,在求得T最大与t布设后,可获得反潜巡逻机向声纳布设位置机动的耗时上限t机动动最,进而可以求得反潜巡逻机距离声纳布设区域的最大距离S机动动最。设最大巡航速度为V机巡高,则具体计算公式如下:

获得S机动动最的值有助于在部署反潜巡逻机时预设其初始位置。
3.3 协同声纳搜潜航路
3.3.1 无人艇航路
在对特定目标的协同声纳探测行动中,无人艇的航路主要分为两个部分:1)向目标初始位置机动;2)作为主动声纳信号源的相关作业。
在初次发现目标并失去信号接触后,无人艇向目标初始位置机动,拉近与目标的距离,提高预设探测区域的主动声纳信号强度。对被动声纳系统而言,目标处的信号强度是决定探测效果的主要因素。单平台被动声纳系统主要依靠目标自身辐射的声信号,其强度级别显然远低于距离相近的主动声纳信号在目标位置形成的信号强度级别,这使得双/多基地声纳的有效探测距离在传感器性能相近时要远大于单平台被动声纳系统。从式(7)可以看出,无人艇在依靠被动声纳初次发现目标后,以低于目标平均航速并按预定方向机动,多基地声纳系统的探测区域完全能够覆盖目标的散布区域。
在反潜巡逻机布设的被动声源浮标开始工作时,无人艇开启主动声纳。为了保持整个多基地声纳系统的稳定性,探测实施过程中无人艇以低速在预设战位进行小半径圆形机动,在保持行动机械部分热机状态的同时尽量降低无人艇噪声对探测的不利影响。
3.3.2 反潜巡逻机航路
反潜巡逻机的航路可以分为3 个部分:1)向预定布设声源浮标的区域高速机动;2)到达布设区域后降低飞行高度与速度,进行浮标布设作业;3)布设浮标完毕后进行爬升,在中高空监听声纳浮标、监控无人艇的工作状态。
反潜巡逻机从初始部署位置向预定布设声纳浮标区域机动时,要保持最大巡航速度,尽量压缩此阶段的耗时。在多基地声纳无盲区探测距离、双基地声纳有效探测最大覆盖角与艇-浮标距离已相继确定的情况下,反潜巡逻机布设声纳浮标的路径也基本确定。布设声纳浮标时反潜巡逻机要在低空保持低速稳定的飞行状态,无法通过增加速度的办法进一步压缩布设声纳耗时。因此,只有通过压缩高速机动阶段的耗时来减小总耗时,这样就能够在目标散布区域过于扩大前构建起多基地声纳系统。同时,总耗时的降低也能够为持续探测目标留有余量,通过时间积累能够增大探测到目标的概率。在高速机动过程中,反潜巡逻机应当及时更新战场态势,监控无人艇工作状态,进行被动声纳浮标投放前准备。
反潜巡逻机在接近首个声纳浮标投放点时,要降低飞行高度与速度、调整飞行姿态与航向,在预设地点依次投下被动声纳浮标。接着,反潜巡逻机增大速度、爬升到中空,进入声纳监听航路、开启被动声纳浮标。由于声纳浮标阵型基本按扇形分布,反潜巡逻机在声纳浮标阵上空巡航,保持对每个声纳浮标的全时监听即可。
4 实例分析
假设无人艇载声纳发射声源级SL=220 dB[9];浅海环境下1.5 kHz 频率下环境噪声谱级NL=67 dB;被动声纳浮标采用扩展阵声纳浮标,其接收指向性DI=14 dB,接收信号监测阈值DT=6 dB;目标声波反射强度TS=10 dB。无人艇初次发现目标坐标为P敌潜初(x0,y0)=(30 km,25 km),平均低噪声机动速度V潜se=9 km/h;反潜巡逻机初始位置为P机初(x'0,y'0)=(30 km,-50 km),最大巡航速度为V机巡高=550 km/h,最低巡航速度V机巡低=320 km/h;无人艇初始位置为P艇初(x0,0)=(30 km,0),平均速度V艇se=2 km/h,艇载被动声纳测距误差σ0=100 m。
首先,求取双基地声纳系统的主要参数。根据式(3),可求得当前的双基地声纳系统的等效探测距离R=18.8 km。为了保持双基地声纳探测区域的连续完整,取无人艇与被动声纳浮标之间的距离D=1.9R=35.7 km。根据式(5)的推导过程,可以得到为使单组双基地声纳探测角度最大时的多基地声纳无盲区探测半径R1=1.94R=36.5 km,单组双基地声纳最大探测角度θmax=31°,需要布设被动声纳浮标的数量N=4,无盲区探测角度为θ总=124°。根据式(7),可求得总耗时上限T最大=1.2 h,进而可以求得目标最大散布区域半径rz=10.9 km。根据式(10),浮标布设位置坐标为:P浮标1=(4.10 km,26.97 km),P浮标2=(20.46 km,36.80 km),P浮标3=(39.54 km,36.80 km),P浮标4=(55.89 km,26.97 km)。
根据式(8),可求得浮标布设路径长度S布设=57.95 km,布设时间t布设=0.18 h。根据式(9),可求得反潜巡逻机向声纳布设位置机动的耗时上限t机动动最≈1 h,则允许的反潜巡逻机初始位置与浮标投放点距离上限为500 km 左右;以本实例中设定的反潜巡逻机初始位置P机初到达第1 个浮标布设位置P浮标1的航程为81 km,完全能够及时按照要求布设声纳浮标。
5 结论
本文介绍了应召搜潜时反潜巡逻机与无人艇协同运用过程,在此基础上提出了无人艇与被动声纳浮标组成多基地声纳系统的设想,分析了相关的阵型设置、参数计算与声纳布设时限等问题,为今后研究反潜巡逻机与无人艇协同反潜作战打下了一定基础。反潜巡逻机与无人艇协同应召搜潜只是两者协同反潜作战的一部分,在检查和巡逻反潜中对于协同方式、多基地声纳系统部署等问题上会存在明显不同,这将是今后的研究方向。
猜你喜欢
电子技术与软件工程(2022年9期)2022-07-09
垂钓(2022年3期)2022-05-14
垂钓(2022年1期)2022-02-09
垂钓(2021年5期)2021-05-31
考试与评价·八年级版(2020年5期)2020-10-29
VOGUE服饰与美容(2020年5期)2020-09-03
垂钓(2019年2期)2019-09-10
