
基于OpenCV 的精装盒烫金图案识别与定位系统的研究与设计
2020-06-28 07:46:36王晓峰刘海斌
机电产品开发与创新 2020年3期
樊 桃, 张 飞, 王晓峰, 刘海斌
(1.中国铁建电气化局集团有限公司, 北京 100043; 2.常州数控技术研究所, 江苏 常州 213164)
0 引言
随着人们生活水平的不断提高, 人们对包装产品的需求从以前的实用性转而更加注重它的美观性, 艺术性和收藏价值, 高档精美的包装产品取代了以前的简单色彩类的包装产品。烫金(亦称烫印)压纹作为印后整饰中的重要工艺,将烫金和压纹结合起来对包装产品起着独特的装饰作用,经压纹后的包装装饰材料表面呈现出深浅不同的图案和纹理,具有明显的浮雕立体感,增强了承压材料的艺术感染力,深受人们的关注和偏爱[1]。 从近年来得市场份额看, 使用压纹工艺的精装盒占据整个精装盒包装市场的比例逐年增加。
精装盒烫金图案压纹的质量和精确美观至关重要,传统的精装盒烫金图案压纹工序为人工操作, 这种方法借助人眼判断决定烫金图案是否摆放正确, 其压纹效果完全由人主观判断决定,具有较大的随机性和误差,操作工人的生理因素、心理因素、视觉疲劳、环境因素等等都能影响最终的压纹效果, 无法保证整批产品质量的稳定性和可靠性[2]。 因此,本论文提出了一种基于Opencv 的精装盒烫金图案识别与定位系统,将视觉识别应用到精装盒烫金图案压纹工序中,来确保精装盒烫金图案压纹质量的稳定性、可靠性和高精度,实现产品的高效高质量生产。
1 系统体系结构设计
系统在精装盒烫金图案压纹生产线上的工作流程为:当精装盒到达指定位置后相机进行拍照采集图片,然后识别图片中精装盒烫金图案的位置数据, 其次依据烫金图案的位置数据计算其定位数据, 最后将定位数据发送给机器人系统, 机器人根据得到的数据抓取精装盒放到指定的位置进行压纹。
1.1 硬件结构设计
精装盒烫金图案检测系统硬件主要包括工控机、光源、工业相机和触发装置。 其中光源和CCD 工业相机的选型为该系统的重点。 由于精装盒烫金图案具有亮度值高和高反光的特性, 光源照射到烫金图案上产生图案局部高亮、边缘模糊不清等现象,不利于图案采集和图案识别。本文通过各种颜色光源实验对比后采用蓝色条形光为照明光源,从精装盒侧面进行照明,有效避免了图案局部高亮、边缘模糊不清等情况。 该系统要求烫金图案最终定位精度在0.1mm 以内,识别范围最大为420mm×350mm,依据此需求和各项其他因素考虑,我们选择了大恒图像1000w像素的水星系列数字相机,型号为MER-1070-10GM-P。 使用相机外触发方式采集图像, 并通过千兆以太网将图形数据传输给系统,保证图像采集的实时性和高效。
1.2 软件系统设计
OpenCV 是一个基于BSD 许可(开源)发行的跨平台计算机视觉库,提供了丰富的图像处理函数[3]。 系统设计中使用Opencv 视觉库设计烫金图案识别算法、 标定算法、模板提取算法、轮廓匹配算法等,并将这些算法代码封装成动态链接库供系统调用。 系统软件界面在VS2010开发平台上使用C# 语言进行设计开发。系统按功能模块划分进行设计,其包括人机交互模块、参数设置模块、相机标定模块、相机拍照模块、图案模板编辑模块、烫金图案识别模块、定位计算模块、与机器人系统交互模块、信息存储模块等。 系统体系结构示意图如图1 所示。
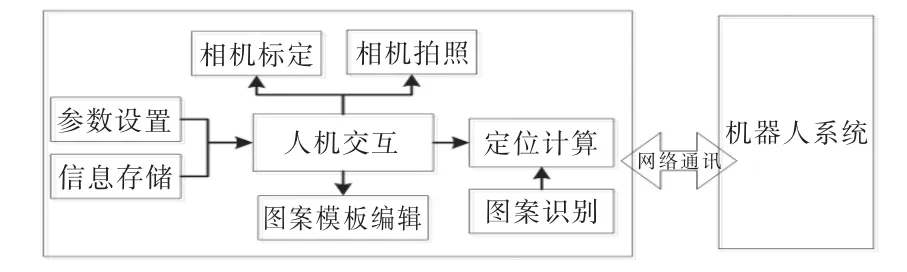
图1 系统体系结构框图Fig.1 System architecture diagram
2 烫金图案的识别与定位
2.1 改进的SURF 匹配算法
由于不同批次的精装盒上的烫金图案各不相同,本文采用图案匹配的方式来实现烫金图案识别。目前关于图像匹配的研究和应用比较多,图像匹配算法按照处理方式不同主要有灰度相关算法、 变换域信息算法和图像特征相关算法三种方式[4]。
SURF 算法是由Herbert Bay 等在2006 年首次提出的一种稳健的局部特征点检测和描述算法。该算法是Sift算法的加速版本, 改进了Sift 算法的特征的提取和描述方式,用一种更为高效的方式完成特征的提取和描述。对物体的旋转、光照等情况有较好的鲁棒性[5]。SURF 算法的实现流程如下:
(1)构建Hessian 矩阵(黑塞矩阵),构造高斯金字塔尺度空间。
(2)利用非极大值抑制初步确定特征点。
(3)精确定位极值点。
(4)选取特征点主方向。
(5)构造SURF 特征点描述算子。
(6)进行特征点匹配。
SURF 算法在求主方向阶段过于依赖局部区域像素的梯度方向, 即便不大偏差角度也可以造成后面特征匹配的误差放大,从而使匹配不成功。
本文针对这种问题提出了一种改进的SURF 匹配算法[6-8],提高了匹配的成功率。 其改进方法为在进行SURF算法前,加入图像滤波处理和边缘检测两项预处理。
在应用于烫金图案识别时, 由于精装盒在拍照时两边有档条定位,位置变化小,故精装盒上烫金图案的位置变化也小。 本文在进行图案匹配时只需要对设定的ROI 区域进行图像识别,这样缩短了计算时间,提高了实时性。 具体实现方法如图2 所示。
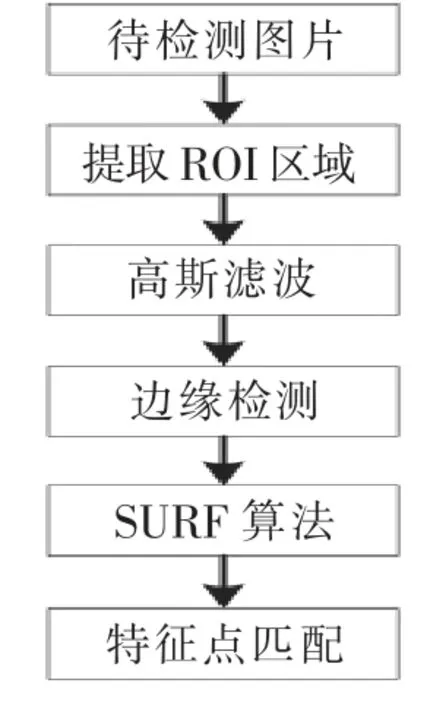
图2 改进的SURF算法流程图Fig.2 Improved SURF algorithm flowchart
2.2 改进的SURF 算法特征匹配结果
在匹配算法程序测试中, 我们的软件开发工具为VS2010,使用的视觉库为Opencv2.9。将精装盒移动不同位置后进行拍照,得要实验图片。本次实验中使用的精装盒如图3 所示, 需要匹配的烫金图案为椭圆中的图案。
算法实现中, 首先加载模板图片和目标图片,然后按照图2流程进行程序实现。 算法的部分代码如下所示:
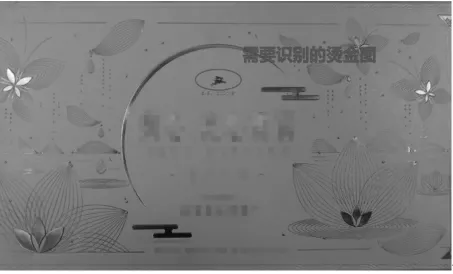
图3 测试精装盒Fig.3 Hardcover box for test

最后本文将模板图片与目标图片的匹配点用线连接在一起,实验结果如图4,图5 所示。 图4 为本文选择的模板图片原图匹配效果,图5 为将精装盒旋转90°后,烫金图案的匹配效果。
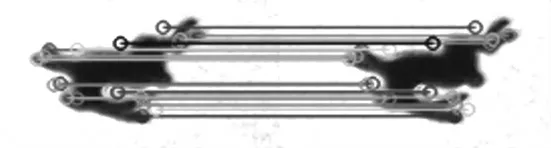
图4 烫金图案原图匹配效果Fig.4 Matching effect of the original bronzing pattern

图5 烫金图案旋转90°效果Fig.5 Matching effect of bronzing pattern rotated 90°
2.3 烫金图案定位
在精装盒烫金图案压纹生产线上,使用的机器人是水平多关节机器人,其上安装的夹具为长条形夹具,夹具安装方式为一端固定在机器人上下运动的R 轴上。这种安装方式下夹具的中心点不在机器人上下运动的R 轴的中心点上,这种情况称夹具为偏心夹具。 夹具如图6 所示。
在生产工艺要求上, 机器人每次抓取精装盒时根据烫金图案位置调整机器人位置保证夹具与烫金图案的位置关系始终一致。此时烫金图案位置数据无法直接使用,需要处理计算为定位数据[9,10]。
烫金图案定位数据为机器人移动到取盒位置时的偏差量数据,其目的是保证机器人抓取精装盒时, 每次抓取时其姿态位置与烫金图案的位置关系始终保持一致。 机器人与烫金图案的位置关系在烫金图案模板设定时确定。机器人抓取精装盒的水平面移动量和旋转轴的旋转角度值为机器人初始设置的位置数据与烫金图案定位数据之和。 我们假定烫金图案模板设定时烫金图案坐标值为p0(x0,y0,θ0),机器人抓取精装盒时坐标值为p1(x1,y1,θ1),当前烫金图案位置数据坐标值为p2(x2,y2,θ2),则烫金图案定位坐标值为△p(△x,△y,△θ),以上数据中x,y 为机器人坐标系下平面坐标值,θ 为旋转角度值。 则图案定位坐标的旋转角度为:

图6 精装盒夹具Fig.6 Hardcover box fixture

在计算烫金图案定位坐标△p(△x,△y)时,我们假定机器人在p1点抓取烫金图案模板旋转△θ角度后, 得到的烫金图案模板坐标值p3(x3,y3,θ3)为:

根据此坐标值, 最终得到烫金图案定位坐标值△p(△x,△y,△θ)为:

化简公式(3)中的中间变量得:

在系统的实现中, 系统将烫金图案识别的数据通过上述公式(4),计算为烫金图案定位数据,然后将其发送给机器人系统执行。
3 总结
本文基于Opencv 的精装盒烫金图案识别与定位系统应用在精装盒烫金图案自动压纹生产线上, 实现了烫金图案识别、定位、缺损检测等功能。 解决了人工操作烫金图案压纹精确度不高和质量不稳定的缺点, 提高了烫金图案压纹精度和生产效率,为企业提高了经济效益。
猜你喜欢
北京汽车(2023年1期)2023-03-03 00:50:38
新型建筑材料(2022年2期)2022-12-14 04:18:55
新型建筑材料(2022年9期)2022-12-12 09:26:40
新型建筑材料(2022年11期)2022-03-01 09:03:27
网印工业(2021年5期)2021-06-02 06:09:04
新型建筑材料(2021年4期)2021-04-01 19:12:48
今日印刷(2019年1期)2019-07-02 16:41:56
制冷(2019年1期)2019-04-11 03:31:12
机械研究与应用(2018年3期)2018-07-11 00:25:38
网印工业(2014年11期)2014-02-07 06:36:03
