无位置传感器伺服系统分数阶滑模观测器设计
2020-06-18 13:23:02聂智博赵志诚高慧敏
太原科技大学学报 2020年3期
聂智博,赵志诚,高慧敏
(1.太原科技大学 电子信息工程学院,太原 030024;2.嘉兴学院 机电工程学院,浙江 嘉兴 314000)
由于信息化时代的到来,现代战争对我军联合作战能力提出了极大的挑战,相应的对武器装备的精准迅速提出了要求,光电伺服跟踪系统作为现代武器的重要组成部分,因此也对其提出了很高要求。永磁同步电机(Permanent Magnet Synchronous Motor,PMSM)具有体积小、功率密度高、转动惯量低、高效节能等优点[1],被广泛应用在光电跟踪系统中。传统的PMSM光电伺服跟踪系统,通常在转子上安装旋变来方便获取转子速度,但是这会增加系统的复杂度和成本,降低系统的可靠性,使其在实际应用中受到一定的限制。因此,把无传感器控制技术应用在PMSM光电伺服跟踪系统中已经成为了一种趋势。
目前无速度传感器的研究方法有:高频注入法[2]、模型参考自适应法[3]、扩展卡尔曼滤波器法[4]、滑模观测器法[5-6]、神经网络[7]等。其中滑模观测器方法有诸多优点,为此在实际中得到广泛应用,但是,滑模变结构的一大弊病是存在着明显抖振,为此学者们开展了一系列的研究。文献[8]通过引入高阶滑模来减小系统抖振和提高系统观测精度,仿真结果表明该设计方法具有可行性。文献[9-12]分别采用一些连续光滑的曲线来代替开关函数,在一定程度上抑制了系统抖振,提高了观测精度。
考虑到分数阶微积分具有记忆、鲁棒性强等特征,本文在非奇异终端滑模面上引入分数阶微积分算子,通过分数阶控制律得到连续光滑的反电动势估算值,最后,通过分数阶锁相环精确估算出电机转速。经仿真验证,将分数阶模型应用在滑模观测器中可实现控制方式间的平滑切换,有效减小了系统抖振,提高了对转速的估算精度。
1 传统滑模观测器设计
PMSM两相静止坐标的数学模型:
(1)
式中:is=[iα,iβ]T,us=[uα,uβ]T,iα,iβ,uα,uβ分别为α,β轴的定子电流(A)与电压(V);eα,eβ为α,β轴的反电动势(V);L,Rs为定子等效电感(H)与电阻(Ω);ψf为磁链(WB);ωr,θr为电机转子速度(r/min)与转子角度(rad)。
根据式(1)构造传统设计方法的状态方程:
(2)

式(2)减去式(1)可以得到:
(3)
(4)
(5)
由式(5)可知反电动势存在不连续信号,需要滤除高频切换信号,得到估算反电势为:
(6)
因为引用了一个低通滤波器,会引发相位延迟,所以需要额外加一个角度,进行相位补偿:
(7)
(8)
2 分数阶非奇异终端滑模观测器设计
本文提出一种分数阶非奇异终端滑模观测器设计方法,来提高传统滑模观测器对转子的估算精度,实现对电机转子位置与转速的准确、快速估计。
重新构建滑模观测器如下:
(9)
式(9)减去式(1)得到电流误差方程:
(10)

(11)

(12)
为实现对外部噪声和系统参数变化的鲁棒控制,设计控制率如下:
ν=νn+νeq
(13)
(14)
(k+η)sgns+μs]
(15)

设Lyapunov函数为:
在对函数求导前,先把控制率v带入电流误差函数得到:
(16)
并对该函数求导:
(17)
对Lyapunov函数求导:
(18)
将公式vn代入公式(18)得出:

(19)
3 基于分数阶锁相环的转速估算
传统滑模观测器通常先进行相位补偿,得到相位角,然后对其求导得到转速。但是有两点不足:第一,微分环节的引入会导致抖振,第二,需要制作相位补偿角度表。本文结合分数阶PID控制鲁棒性强和锁相环相频跟踪好的特点,使用分数阶锁相环(Fractional order phase-locked loop,FO-PLL)来估算转子位置和转速,分数阶锁相环结构图如图1所示。
对图1算法进行分析:
(20)
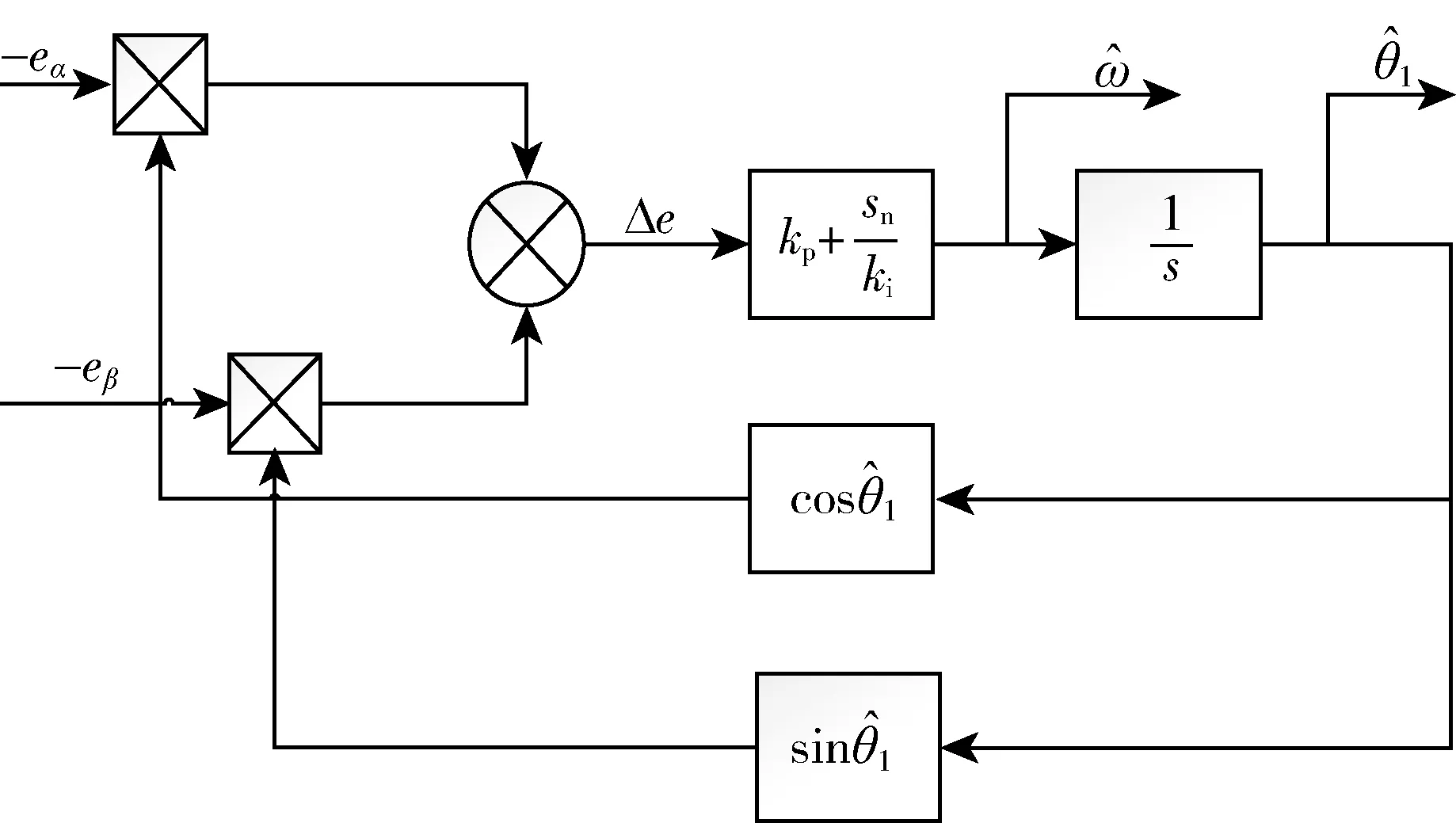
图1 分数阶锁相环结构框图
(21)
锁相环闭环传递函数为:
(22)
锁相环误差传递函数为:
(23)
系统的稳态误差:
(24)
4 仿真验证与分析
在MATLAB/Simulink平台上建立基于PMSM的分数阶滑模观测器仿真模型,采用id=0的矢量控制策略,实现对永磁同步电机的无传感器控制,控制系统框图如图2所示。
仿真所采用的电机额定参数为:
UN=220 V,R=2.875 0 Ω,L=8.5e-3H,ψf=0.175 Wb,J=e-3kg·m2,极对数p=4.
本文设计方法的参数为:q=3,p=5,γ=0.001,c=1,u=0.8,μ=1 200,k=20 000,η=400,r=0.85,kp=20,ki=500.
传统设计方法的参数为:
k=200,wc=20 000.
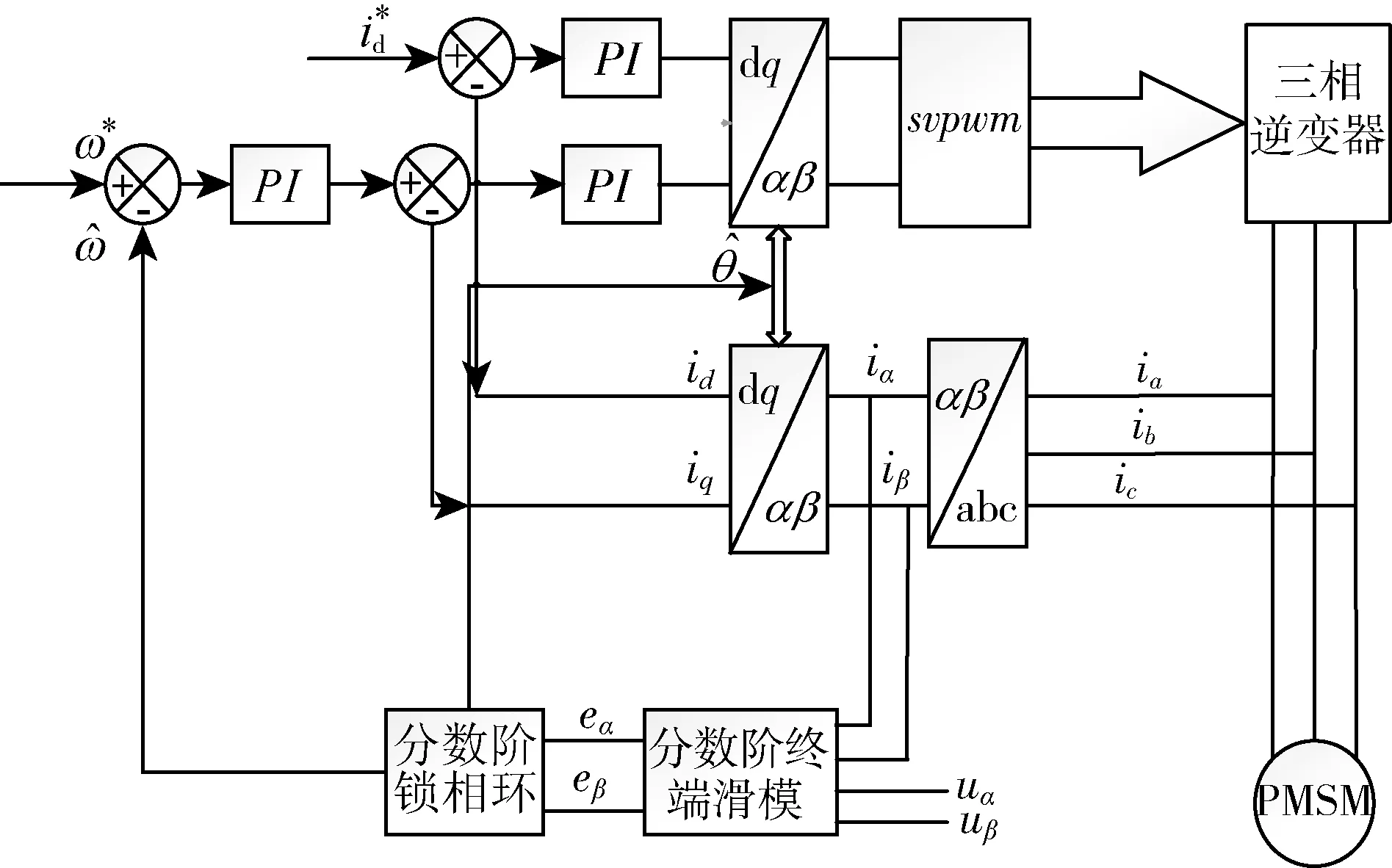
图2 控制系统框图
当系统速度设置为1 000 r/min时,图3,5是使用传统方法的系统仿真结果,图4,6是使用本文设计方法的系统仿真结果。
从图3(a)可见,当使用传统设计方法来估算转速时,估算出来的速度波动很大,并且存在大量的高次谐波。从图3(b)可看出在低速时转速估算误差接近18 r/min,在高速时转速估算误差接近12 r/min,从而可以得出结论:当系统使用传统设计方法时,在低速时转速估算误差最大,转速估算精度较低,使其在实际应用中受到一定限制,高速时转速估算误差较低速时有所减小,但是还是难以满足实际要求。
从图4(a)可以看出,系统采用本文提出的设计方法时,对转速的估算波动小,曲线光滑,不存在高次谐波,估算精度较高。从图4(b)看出,在低速时转子速度的估算误差小于10 r/min,高速时转子速度的估算误差小于1 r/min,可以看出本文提出的滑模观测器设计方法无论在低速,还是高速都可以实现对转速的精准跟踪,满足实际应用的基本要求。从图5(a),(b),图6(a),(b)可以看出,传统设计方法虽然补偿了相位,但是对转子位置的估计仍存在滞后,使其在实际应用中受到限制。本文提出的设计方法,使用分数阶锁相环估计转子位置,估算出来的转子位置能够与实际转子位置几乎保持一致。
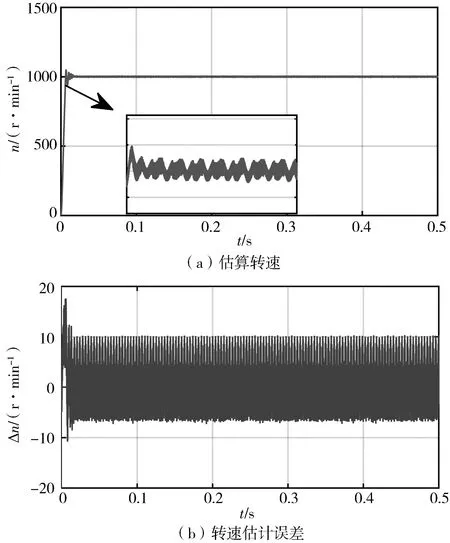
图3 传统滑模观测器转速分析
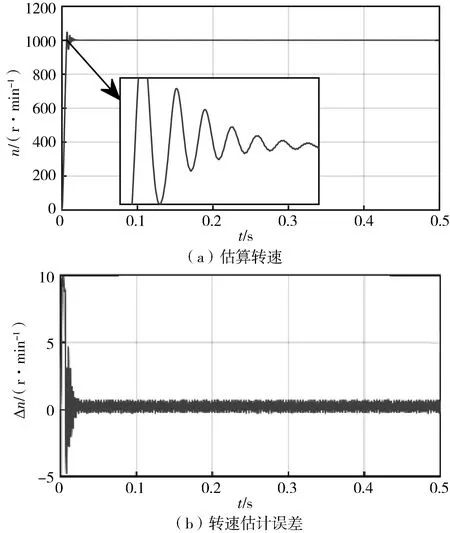
图4 分数阶非奇异终端滑模观测器转速分析

图5 传统滑模观测器转子位置分析
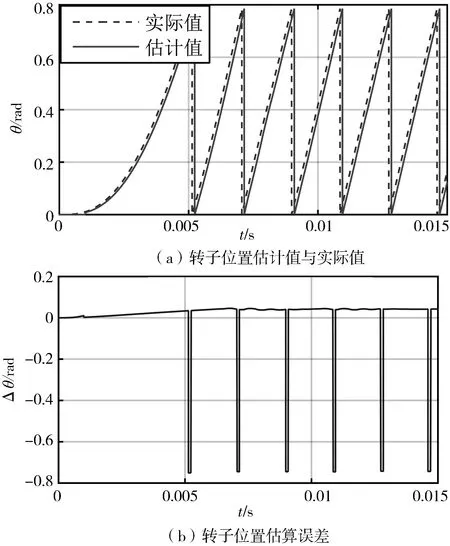
图6 分数阶非奇异终端滑模观测器转子位置分析
为验证本文所提方法在转速发生突变时,能否精准跟踪转速。当系统初始速度是800 r/min时,在0.2 s时转速突然变成1 000 r/min情况时,图7是系统使用传统设计方法的仿真结果,图8是系统使用本文设计方法的仿真结果。
从图7(a),(b)可以看出,当在0.2 s改变转速,系统使用传统设计方法时,对转子速度的估算偏差超过14 r/min,0.04 s以后对转子速度的估算偏差减小到9 r/min,但是还是无法精准、快速跟踪转速。从图8(a),(b)可见,当在0.2 s转子速度突然发生变化时,系统使用本文设计方法时,对转子速度的估计偏差小于8 r/min,0.02 s以后对转子速度的估计偏差小于2 r/min,可以看出当转子速度突然发生变化时,本文所提方法可以快速跟踪实际转速并且估算偏差很小。
5 结论
为了提高光电伺服跟踪系统对转速的估算精度,本文设计了分数阶非奇异终端滑模观测器,提出的控制律中不仅有积分项还有分数阶项,可以很好的对信号进行滤波处理。然后,通过分数阶锁相环调制出转子速度,所以分数阶滑模观测器不需要加滤波器,也不需要加角度补偿,就可以提高观测器估算精度,减小系统抖振,克服传统滑模观测器存在的相位滞后与高频抖振现象。仿真结果表明,本文提出的设计方法能实时的跟踪转子位置与转速,有效减小了系统抖振,提高了对转速的估算精度。

图7 传统滑模观测器转速突变分析
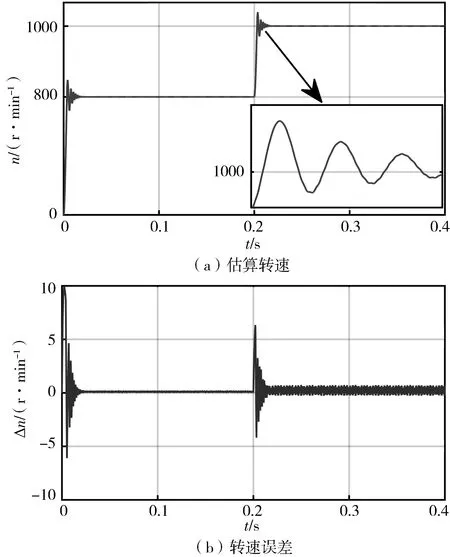
图8 分数阶非奇异终端滑模观测器转速突变分析
猜你喜欢
中国惯性技术学报(2019年6期)2019-03-04 09:50:06
测控技术(2018年4期)2018-11-25 09:47:26
测控技术(2018年3期)2018-11-25 09:45:40
电子测试(2018年14期)2018-09-26 06:04:00
电测与仪表(2017年24期)2017-12-19 05:15:22
铁道科学与工程学报(2015年5期)2015-12-24 12:12:08
深空探测学报(2015年3期)2015-12-07 11:15:06
电测与仪表(2015年9期)2015-04-09 11:59:28
电测与仪表(2015年19期)2015-04-09 11:32:56
电测与仪表(2014年11期)2014-04-04 09:21:36