
基于PSO-BA算法的飞机地面空调系统仿真
2020-06-15 07:15吴婷娜陈贵波
中国民航大学学报 2020年2期
丁 芳,周 扬,吴婷娜,陈贵波
(1.中国民航大学电子信息与自动化学院,天津 300300;2.广州白云机场空港设备技术发展有限公司,广州 510000)
飞机地面空调车是飞机发动机停机状态下,在地面通电检查和维修飞机电器电子设备时,给飞机舱内提供干燥而洁净的给定温度和湿度的冷风、热风和通风,用来控制飞机电器电子设备工作环境条件的设备[1],作为机动灵活、环保型的设备车辆,飞机地面空调代替高耗能、高污染的辅助动力装置(APU),保障了电子设备的正常运行,极大地减轻了航空公司的运行成本,减少了APU 所造成的环境污染和能源浪费。温度控制系统是飞机地面空调系统重要的组成部分。在温度控制系统中,PID 控制是最为传统和经典的控制方式,但由于传统PID 控制无法较好地解决飞机地面空调大滞后、时变非线性等问题,因此,研究智能算法改进PID控制系统是十分必要的。除了大滞后等问题,PID控制本身在信号输出上也存在着一些不足。
随着智能算法的发展与创新,研究人员已将智能控制理论带入到PID 的整定中,如粒子群算法(PSO)、遗传算法(GA)等。由于粒子群算法全局搜索能力较弱,较依赖算法参数且容易陷入局部最优,相关人员提出多种改进策略。文献[2]利用新型的惯性权重调整策略来提高PSO 寻优能力;文献[3]中利用GA 算法中杂交机制来加快粒子的搜索速度。但针对温度控制大滞后、参数多变等问题时,这几种改进策略依然存在一定弊端。根据某机场提供的飞机地面空调温度控制要求,拟采用蝙蝠算法与粒子群算法混合优化PID 控制。通过两种算法的融合,提高算法的精确度和抗干扰能力,以实现飞机地面空调的精准控制。
1 飞机地面空调系统
飞机地面空调系统基本工作原理为:通过飞机地面空调车的温度传感器来实时监测供风温度,控制器通过现场温度和设定温度之间的差值进行计算。根据算法的控制信号来调节空调的冷热阀门,改变供风量及供应气压,从而实现温度的实时调节。某机场飞机地面空调系统结构,如图1所示。
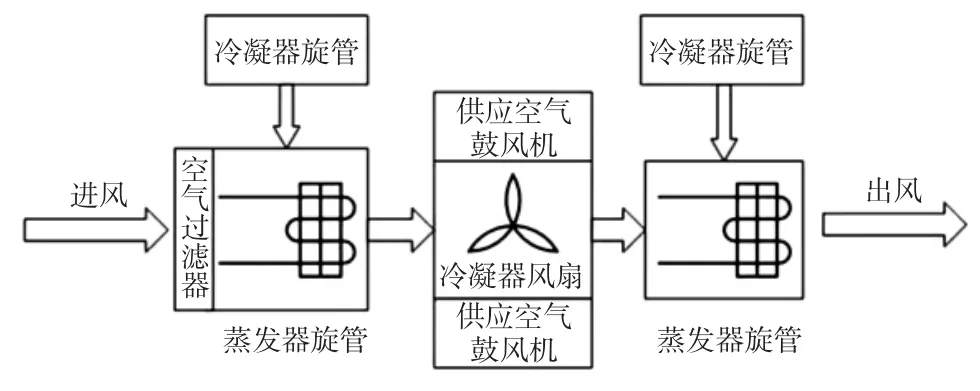
图1 飞机地面空调系统结构图Fig.1 Structure diagram of aircraft ground AC system
飞机地面空调系统与一般的温度控制系统相类似,国内外飞机空调车温度控制主要采用PID 控制[4],但该方法面对复杂环境时控制效果并不理想。通常PID 控制中Kp、Ki、Kd3 个参数主要是通过Z-N 整定法来进行人工调整,但人工整定,控制器很容易产生振荡,且超调量过大。
考虑到区域位置、环境条件、气候等因素,地面空调设备需满足10 ℃冷风和50 ℃热风及一些其他通风条件。综合各种因素及测试数据,得到飞机地面空调的温度控制模型为

其中:K 为静态增益;T 为惯性时间常数;τ 为纯滞后时间。经过反复调试,得出飞机地面空调系统模型[5]为

其中:飞机地面空调的现场温度yd(t)和设定温度y(t)之间的差值是用来调节PID 控制的关键。根据设定温度与现场测量温度构成控制偏差来调节控制器参数[6]。误差公式为

飞机地面空调PID 控制器的数学模型为

或可写成传递函数形式,即

其中:Kp为比例系数;Ti为积分常数;Td为微分时间常数。
2 粒子群算法
PSO 算法属于进化算法的一种,该算法通过随机解迭代寻优,且通过适应度来评价解的优劣[7]。
2.1 粒子速度和位置更新
基本粒子群算法的速度更新和位置更新如下

其中:w 为权值;c1、c2为学习因子;r1、r2是[0,1]范围内的随机数;Pi为个体历史最优位置;Pg为种群历史最优位置。
2.2 适应度函数
PSO 算法在搜索进化过程中用适应度来评价个体优劣,并作为搜索个体位置更新的依据。为了获取满意的动态特性,采用误差绝对值时间积分性能指标作为参数选择的最小目标函数。为了防止控制能量过大,在目标函数中加入控制输入的平方项。同时为了避免超调,采用惩罚控制,一旦发生超调,将采用超调量作为最优指标的一项,得到的最优指标函数为

其中:w1=0.999,w2=0.001,w3=10。
3 蝙蝠算法
蝙蝠算法(BA)是一种模拟蝙蝠捕食行为特征的群智能搜索算法,通过模拟蝙蝠回声定位捕食猎物的行为,寻找搜索问题的最优解[8]。首先,蝙蝠在可行域中根据自身状态及群体中的最优位置更新飞行速度,若速度超出自身飞行的极限,则重置速度值,并调整自身的位置;若蝙蝠当前位置优于其调整前的位置,则不改变;若蝙蝠当前位置比调整前的自身位置差,则按轮盘赌策略决定是否移动到最优位置附近选择的一个位置,以期望精确获得比当前最优位置附近更优的点[9]。
3.1 蝙蝠算法数学模型
蝙蝠算法的声波频率、速度、位置更新的表示[10]如下
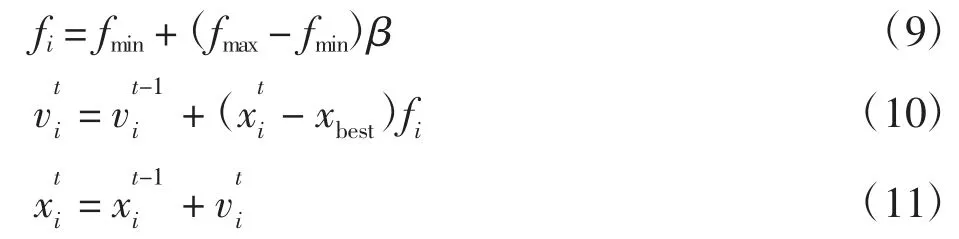
其中:β∈[0,1]的随机数;fi为蝙蝠i 发出的搜索声波频率;fmax和fmin分别为蝙蝠发出声波的最大频率和最小频率,显然fi∈[fmin,fmax];xbest为当前粒子最优位置。
3.2 声波强度和频率模型
蝙蝠算法要根据发出声波的强度和速率大小来调整搜索速度和更新位置。声波强度和速率更新如下

其中:A 为声波强度;0 <α <1,是声波强度衰减系数;γ >0,是声波速率增强系数;r 为声波速率[11]。
4 算法设计方案
混合算法应用于PID 控制中,实现对飞机地面空调系统的设计。设计时,根据飞机地面空调的系统特性,进行降阶处理后,得到飞机地面空调系统的温度控制模型,如图2所示。
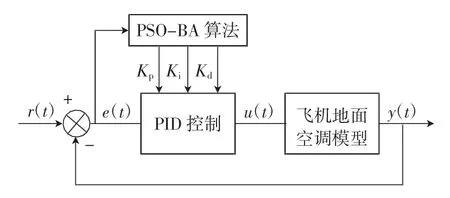
图2 PSO-BA 整定的温度控制框图Fig.2 Temperature control block diagram of PSO-BA setting
根据误差绝对值时间积分性能指标确定混合算法的适应度函数,并进行参数编码。初始化粒子群的速度和位置,按照设计方案,根据粒子的速度和位置更新方式更新粒子的速度和位置。对更新完粒子的速度和位置,采用蝙蝠算法对粒子进行突变,利用蝙蝠算法声波强度和速度迭代来改变粒子的位置,粒子位置的更新公式如下

其中:xold为粒子突变前的位置;xbest为全局最佳;xnew为新的粒子位置。
通过声波强度和频率按照式(12)和式(13)进行迭代,粒子位置不断更新,将新产生的粒子位置与当前最优解进行比较,选取最优解继续进行迭代,直到找到全局最优解,从而找到最优的参数值,实现对飞机地面空调系统的设计和优化。
蝙蝠粒子群混合算法的具体设计过程如下:
1)初始化粒子群,包括群体规模N、粒子的位置xi和速度vi;
2)计算粒子适应度值Fi;
3)对每个粒子的适应度值Fi和个体极值Pbest比较,如果Fi优于Pbest,用Fi代替Pbest;
4)对每个粒子的适应度值Fi和全局极值gbest比较,如果Fi优于gbest,用Fi代替gbest;
5)根据式(6)和(7)更新粒子的位置xi和速度vi;
6)生成随机数β,如果满足β >r,进行突变,利用式(14)改变粒子位置的同时生成局部新解;
7)对式(15)得到的局部最优解进行比较,若改进后的粒子位置得到改善,则粒子移动到更新之后的位置;
8)满足条件退出,否则返回步骤2)。
算法流程如图3所示。
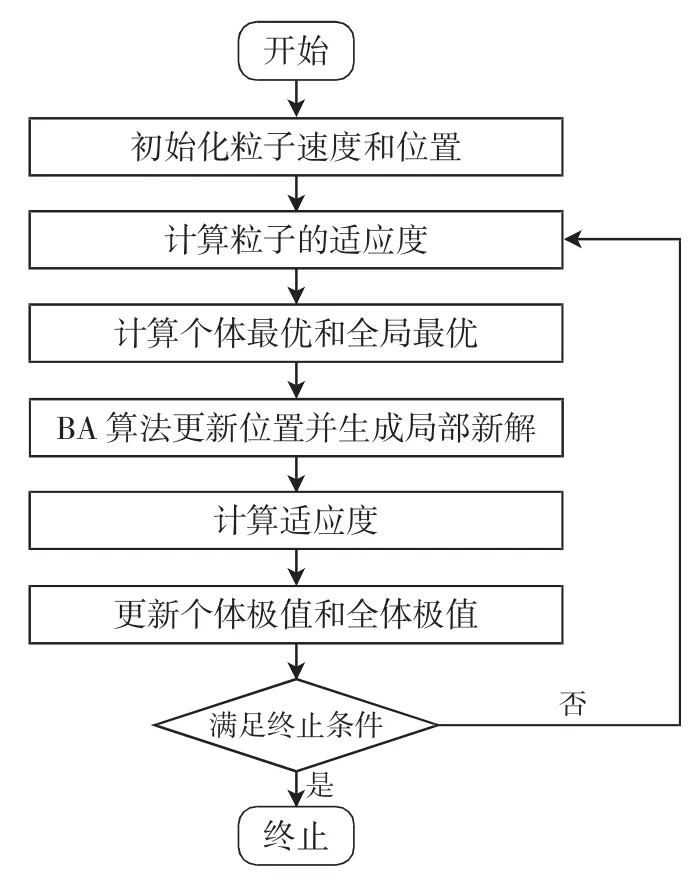
图3 PSO-BA 算法流程Fig.3 Flow chart of PSO-BA algorithm
5 仿真结果
采用的一阶惯性加纯延时环节[12],根据飞机地面空调的设计要求,采样时间设计为4 s,延迟时间设计为采样时间的5 倍。以冷风10℃为例进行曲线仿真。
参数设置:拟将PSO-BA 算法的最大迭代次数设置为100,种群的规模设置为30。音量参数A 设置为0.1。声波频率r 设置为0.9。
仿真得到PSO-BA 适应度函数曲线与其他算法适应度函数曲线进行对比,如图4所示,可看出PSOBA 算法迭代优化的适应度值更低,收敛速度更快。得到PSO-BA 的PID 参数优化曲线如图5所示,可看出算法迭代寻优,最终达到控制要求。
PSO-BA 算法优化的响应输出曲线及响应输出误差曲线与其他几种算法对比,结果如图6和图7所示,其中rin 用来标识设定值。
从图6和图7可看出:PSO-BA 优化算法无论是从精度上、响应速度上都优于各自单独的算法,超调量小、稳定性高、性能较好。
此外,遗传算法GA 与PSO-BA 算法的对比,并和传统的PID 进行比较,得到相应的响应输出曲线和输出误差曲线如图8和9所示。
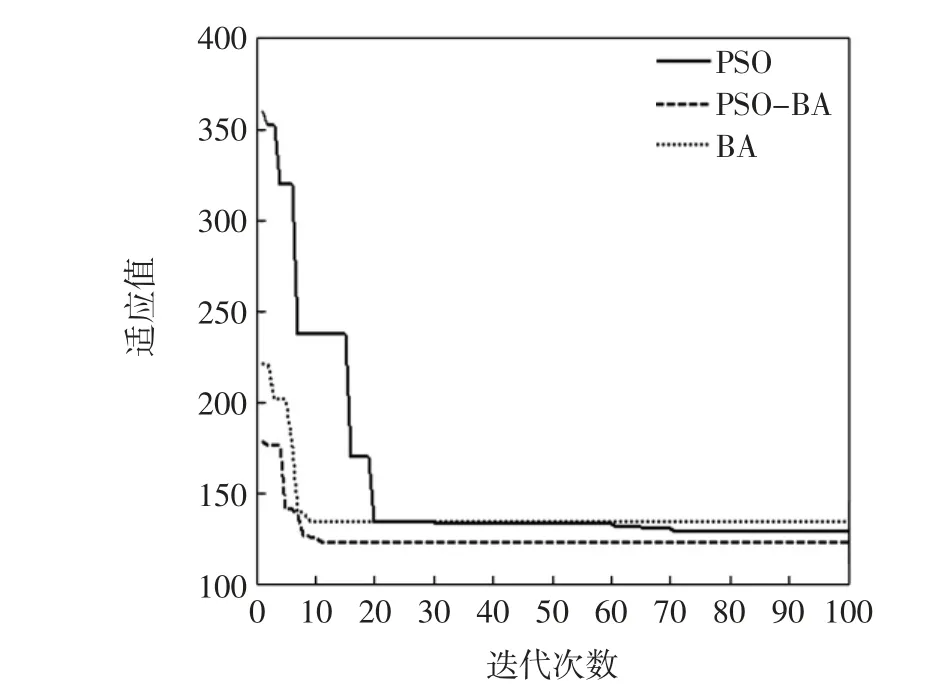
图4 不同算法的适应度函数曲线Fig.4 Fitness function curves of several algorithms

图5 PID 参数优化曲线Fig.5 PID parameter optimization curve
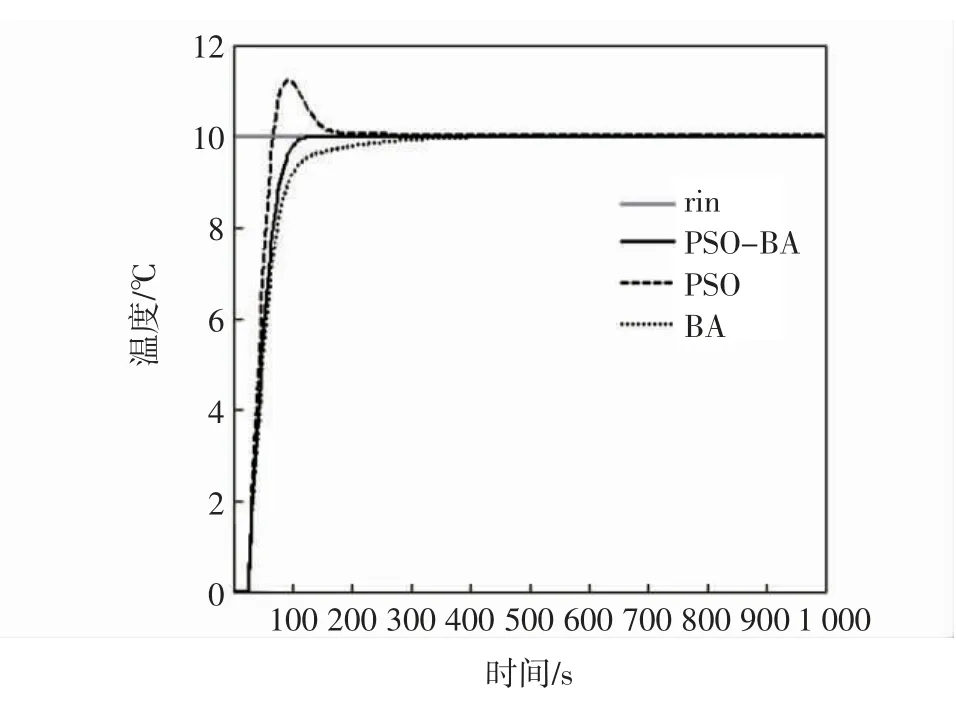
图6 响应输出曲线综合比较Fig.6 Comprehensive comparison of reponse outout curves
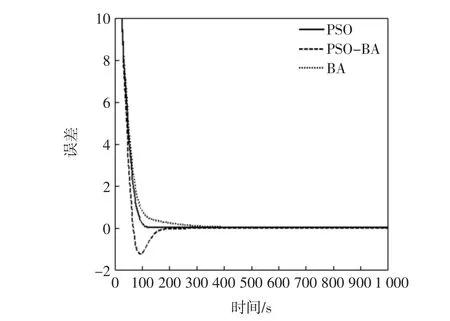
图7 响应输出误差综合比较Fig.7 Comprehensive comparison of response output errors
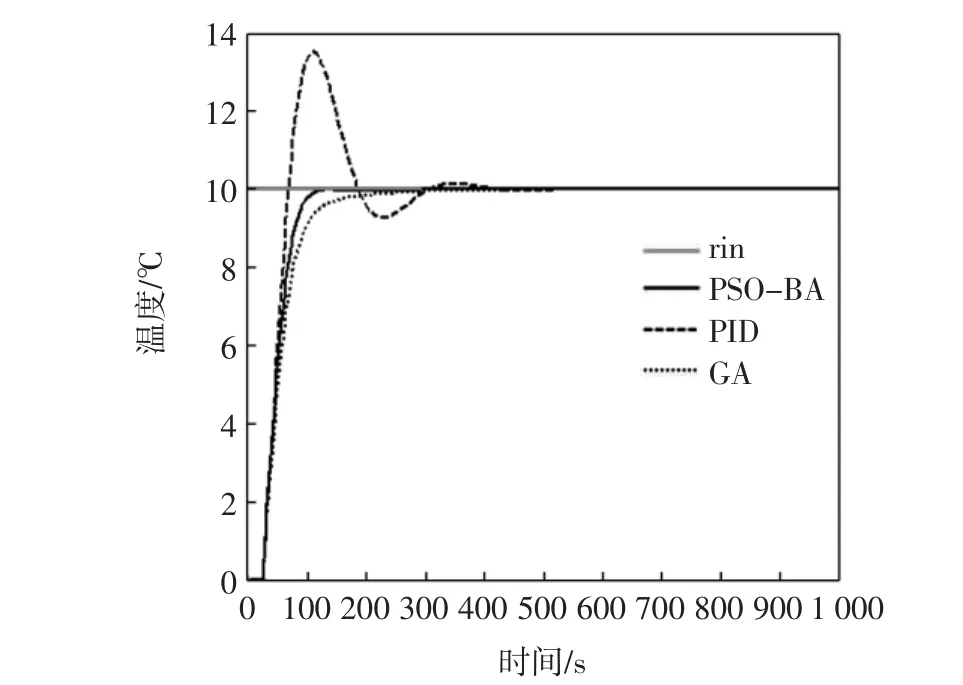
图8 响应输出曲线综合对比Fig.8 Comprehensive comparison of response output curves
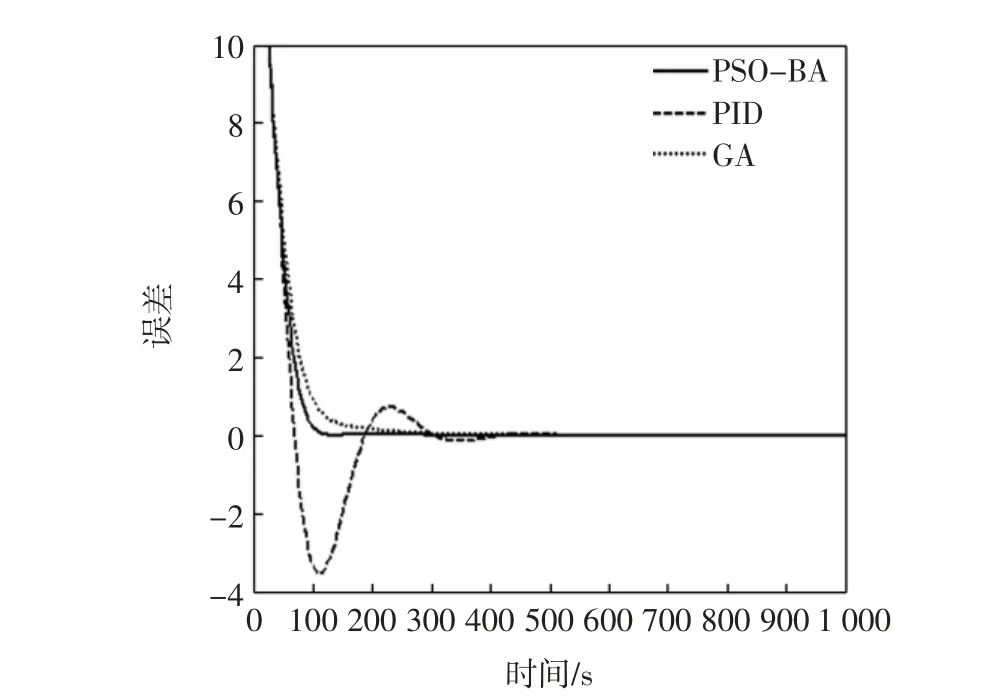
图9 响应输出误差比较Fig.9 Response output error comparison
从图8和图9中可看出:经典PID 控制超调量大且稳定性较差,已不适合直接应用到飞机地面空调温度控制系统当中;虽然GA 算法对PID 的整定起到了一定的作用,超调量减小,稳定性提高,但响应速度慢,而PSO-BA 算法优化的曲线相较于其他几种算法,响应时间、精度和稳定性方面都有一定提高,有效地解决了飞机地面空调温度控制系统非线性、时变等问题,可满足更快、更精准的设计要求。
6 结语
针对飞机地面空调温度控制系统,利用蝙蝠算法前期搜索速度快的优势,优化粒子群算法,加强粒子群算法的搜索能力,设计了PSO-BA 算法。通过飞机地面空调仿真模型进行算法仿真,得到混合算法的PID整定曲线和响应输出误差曲线,并与其他几种智能算法比较,证明混合算法对PID 的整定较其他几种算法响应速度快且具有较强鲁棒性和稳定性,有效地提高了飞机地面空调温度控制系统的动态性能,更好地应用于飞机地面空调设备的优化中。
猜你喜欢
计算机仿真(2022年8期)2022-09-28
电子制作(2018年23期)2018-12-26
小猕猴智力画刊(2017年6期)2017-07-03
小溪流(画刊)(2017年5期)2017-06-15
当代旅游(2016年10期)2017-04-17
小溪流(画刊)(2016年12期)2017-02-04
微型小说选刊(2015年5期)2015-06-05
财经理论与实践(2015年2期)2015-04-16
小学生·多元智能大王(2014年5期)2014-07-24
智慧与创想(2013年5期)2013-06-25
