
半球谐振陀螺在海洋导航定位中的应用
2020-06-15 03:21许江宁何泓洋
导航定位学报 2020年3期
李 鼎,许江宁,何泓洋
半球谐振陀螺在海洋导航定位中的应用
李 鼎,许江宁,何泓洋
(海军工程大学 电气工程学院,武汉 430033)
为进一步研究惯性导航系统,介绍1种具有高精度、高稳定性、长使用寿命的固态振动陀螺:给出半球谐振陀螺的结构和工作原理;阐述其国内外发展历程、研究现状和实际应用;最后分析半球谐振陀螺在海洋导航定位中的发展潜力和发展趋势。
半球谐振陀螺;导航;惯性技术;海洋导航
0 引言
随着我国经济发展,海外贸易延伸越来越远,需要加快建设海洋强国,以达到近海防御、远海护卫的战略要求。海军装备的发展十分重要,未来海军对武器装备将提出更高要求,对导航定位的核心即惯导系统也将提出更高的需求。未来的惯导系统将以高精度、高可靠性、高稳定性、长使用寿命、抗干扰能力强为目标。本文主要介绍和分析满足未来海洋导航定位需求的半球谐振陀螺技术。
半球谐振陀螺(hemispherical resonator gyros, HRG)是1种发展前景良好的新型高性能陀螺。半球谐振是基于科里奥利加速度产生的科氏力[1],利用谐振子开口端驻波进动效应来检测基座旋转。半球谐振陀螺是1种结构简单的新型固体振动陀螺,与经典陀螺相比,没有高速旋转的转子与活动支撑,从根本上避免了机械摩擦,大幅度提高了精度,具有良好的抗冲击振动性[2],惯性技术界认为,半球谐振陀螺是21世纪捷联惯导系统中最理想的元件之一[3]。美国空间任务优先采用半球陀螺惯性导航系统,已经累计在空间零故障飞行300万h,可靠性高达0.995[4]。其具有15 a以上的超长使用寿命,适合应用于卫星、空间飞行器、海洋舰船等的导航工作。
在美国、俄罗斯、欧洲等国家和地区,半球谐振陀螺已经在卫星、空间飞行器、海军舰艇、陆军装备、矿井探测等领域得到了广泛应用[5]。半球谐振陀螺已经成为法国新一代海洋导航定位系统的主要惯性导航设备。国内的研究虽然起步较晚,但在“十五”计划后,就取得了突破性成果,已经有完整的研发生产线,能够研发制造出满足我国航天航空方面工程应用的产品。
1 基本结构与工作原理
1.1 基本结构
半球谐振陀螺结构主要由敏感器件、缓冲电路、控制电路等部分组成,其中敏感器件包括3个部件:半球谐振子、激励罩和敏感基座[6],如图1所示。

图1 半球谐振陀螺结构
半球谐振子是1个由熔融石英材料制成的半球弹性体,是构成陀螺的主体部分。激励罩主要由激励电极组成,利用静电力作用,谐振子产生振动并提供修正误差。敏感基座上有多个读出电极,用于读出根据电容检测出的谐振子振动情况,并获得陀螺的旋转角度信号[7]。
随着加工技术的进步,目前基于经典3件套构型改进成2件套构型,2件套构型如图2所示。2件套构型没有3件套构型中的“激励罩”,而是把“敏感基座”上的“敏感电极”与“激励电极”结合在一起[8]。这种2件套构型体积和质量都比3件套构型小,结构简单,且成本更低。其缺点是加工技术难度大、精度高、实现难度大。
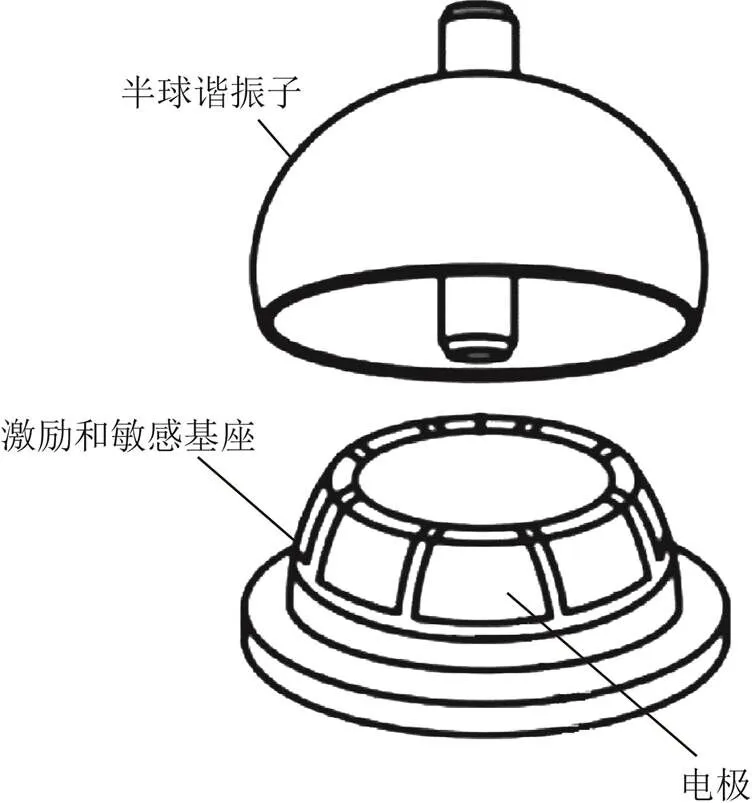
图2 2件套半球谐振陀螺构型
1.2 工作原理
半球谐振陀螺是1种固体振动陀螺,它通过检测谐振子径向振动产生的驻波沿环向的进动,来确定旋转角度与速度[9]。
半球谐振子在激励罩的作用下,处于2阶工作振型时,振型进动原理如图3所示。

图3 振型进动原理
陀螺在不加外界角速度输入时,半球谐振子维持环向波数为2的4波腹振动,半球谐振子唇缘的振型在2个正交的椭圆与圆之间变化,振型具有4个波腹点和4个波节点,2个椭圆长轴的端点为驻波的波腹点,2个椭圆的交点称为波节点[10]。

因此只要测量出半球谐振子的振型角变化,即可计算出陀螺转过的角度[7]。
半球谐振陀螺有2种常用的工作模式——全角模式(whole-angle mode)和力平衡模式(force-to-rebalance mode)[11],及1种新型工作模式——自校准模式(self-calibration)。
通过控制激励罩的激励电场,使谐振子建立1个固定振幅的驻波。陀螺在何种模式下工作,取决于驻波是否相对于谐振子产生相对运动[12]。当在力平衡模式下工作时,激励电场控制驻波波形,与谐振子保持相对静止,通过检测保持相对静止所需的静电力大小,即可以获得科氏力的大小,根据科氏力与转速间的比例关系,即可解算出载体的转动速率[13]。虽然这种模式检测精度高、噪声特性低,但由于受制于力平衡回路的电极电压饱和作用,其动态测量范围较小[14]。当在全角模式工作时,驻波与谐振子产生相对运动。由于进动角与输入角速度成正比,则可实时解算谐振振型直接输出角度信号。此模式谐振振型处于自由进动状态,因此测量范围大,动态性能好,线性度高。新型工作模式即自校准式,是利用交换激励检测模态,进行陀螺零偏的自校准,通过跟踪进动因子,进行力平衡模式比例因子的自校准,此模式可将陀螺精度提高1个数量级[15]。
2 国内外研究现状
美国、法国、俄罗斯在HRG的研制中处于领先地位,目前它们的HRG已经成功应用到卫星、飞机、空间飞行器、海洋船舶,陆地导航等领域。英国、日本近年来也开始了HRG的研制。国内的HRG研究起步较晚,但目前也取得很大突破,并已应用到卫星导航中。
1986—1990年,HRG研究取得许多突破:例如,提出利用激光进行质量清除的谐振子平衡器、改进关键工艺、开发新的谐振子制造方法来改善陀螺的时间常数等,先后研制出HRG158系列、直径为30 mm的HRG130T。美国最早研究旋转惯性导航系统就使用了Delco公司专门研制的半球谐振陀螺,基于HRG158X开发的Carousel-400惯导系统为旋转惯导系统的代表作品,该系统将HRG集成于6轴冗余导航系统中,成为首个运用到航空领域的HRG。
法国的半球谐振陀螺研制,在全球属于领先地位,代表性的公司为法国赛峰公司,其集团旗下的萨基姆(Sagem)公司自20世纪90年代开始研究HRG技术,之后在半球谐振陀螺关键技术如谐振子加工、谐振子调平、高精度控制电路等方面提出技术方案,如图4所示。

图4 Sagem公司技术研发进度
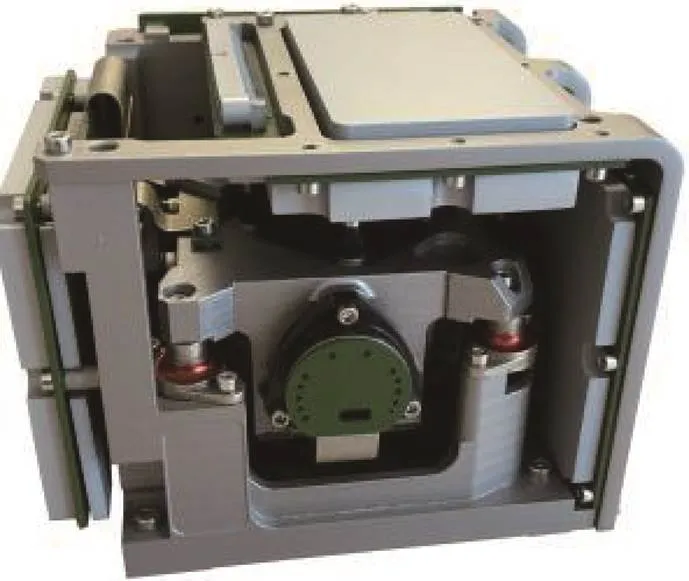
图5 ONYX惯导系统

表1 ONYX性能参数
目前ONYX已经成功应用于法国陆军的狮鹫(Griffon)轮式装甲车系统、GEONYX陆地系统、ARIANE6型火箭、PAVAM单兵导航等项目。

图6 实践-9号卫星半球谐振陀螺姿态敏感器
图7 国防科大研制的微半球谐振陀螺样机
3 HRG在海洋导航定位中的应用与分析
3.1 HRG在海洋导航定位中的应用
20世纪80年代起,HRG就开始运用到航空航天导航领域,但是HRG在海洋导航定位领域的应用,在近些年才开始得到发展。在海洋导航定位领域,HRG主要应用于航姿参考系统与惯性导航系统。
HRG结构简单、高精度、高可靠性、免维护等品质满足了长航时运行而无需维护的船舶导航。法国赛峰电子与防务公司在HRG的海洋导航定位研究中占主导地位。赛峰公司为商船、工程船舶、近海船、各种规模的军舰和潜艇提供高性能、高精度的导航系统,主要推出了面向水面舰艇的BLUENAUTE系列、ARGONYX系列和面向海军潜艇的BLACK-ONYX系列的惯性导航系统。这3种惯性导航系统都是基于赛峰公司的HRG Crystal技术研发的,赛峰公司在海洋导航定位领域主推产品为BLUENAUTE系列惯性导航系统(如图8所示)。

图8 BLUENAUTE系列惯导系统

3.2 HRG在海洋导航领域应用潜力分析
除了半球谐振陀螺,海洋导航定位惯性导航系统采用的陀螺还主要包括:液浮陀螺、静电陀螺、激光陀螺、光纤陀螺等。
美国20世纪80年代以前的水面舰船与潜艇,广泛应用液浮陀螺,20世纪从80年代开始,在战略核潜艇上装备静电陀螺。90年代以后,激光陀螺普遍装备在水面舰艇与部分战术攻击核潜艇上,战略核潜艇装备了新一代静电陀螺。目前美国正用光纤陀螺替换激光陀螺,水面舰艇已经完成了替换工作[37]。
我国大部分水面舰船的惯导系统,采用的是液浮陀螺。战略核潜艇主要使用静电陀螺,我国早期使用的为俄产静电陀螺,近年来国产静电陀螺水平已经接近美国早期水平,国产静电陀螺也开始装备到核潜艇上。
法国在20世纪90年代中后期,装备的惯性导航系统是激光陀螺,近年来光纤陀螺得到发展,开始装备舰船。法国目前积极研究半球谐振陀螺,并将逐步装备到各型水面舰船与潜艇上[37]。
未来的惯性导航系统将以高精度、高可靠性、高稳定性、长使用寿命、抗干扰能力强为目标[38],半球谐振陀螺的特点满足未来惯导系统的技术要求,是新一代舰船惯性导航系统的理想惯性元件。表2列出了各代海洋导航定位惯性导航系统采用的各种陀螺,并对半球谐振陀螺与其他各种陀螺性能进行比较分析,对半球谐振陀螺进行潜力分析。

表2 海洋导航定位惯性技术比较
分析表2可以得出:静电陀螺是目前精度水平最高的陀螺,适用于潜艇等高精度场合,HRG的精度次于静电陀螺。HRG的精度目前无法超越静电陀螺。但是HRG相比于静电陀螺,有着成本低、启动时间短、抗干扰能力强、体积小等优点。静电陀螺是导航系统中费用最高的元件,这限制了它的进一步推广与发展。对于光纤陀螺与激光陀螺,其优势主要体现在成本方面,精度有一定的发展潜力,但是与HRG相比,精度较低。HRG可以满足我国海军长航时作战舰艇对长航时工作、高精度、高可靠性、高抗干扰能力的惯性导航系统的需求。综上所述,HRG相比其他陀螺有着更好的发展前景。
但是,HRG也存在着一些限制其发展及推广的短板:
1)目前HRG的制造成本较高,单只HRG高达10万~100万美元,不利于其市场开拓及工程化应用。
2)由于石英半球谐振子的加工与装配工艺限制,而其壁薄、形状复杂、对加工精度要求高,制约了HRG的研制。同时,在半球谐振陀螺装配过程中,谐振子、激励罩与读出基座间存在装配间隙误差,影响其均匀性和对称性,导致半球谐振陀螺的谐振中心偏离质心和形心,影响半球谐振陀螺的精度。
3)测控电路对谐振子的振动控制的不精确性,也是限制HRG精度的1个因素,因此需要进一步研究高分辨率的测控电路[39]。
4 HRG发展趋势
随着科技水平的发展及制造工艺的提高,半球谐振陀螺技术也随之加速发展。半球谐振陀螺未来的发展趋势主要为以下几个方面:
1)向更高性能化发展。更高性能是指更高精度、更低成本、系统体积更小、功耗更低。目前国内研究的半球谐振陀螺精度和国外研制的半球谐振陀螺相比差距较大,还有很大进步空间。可以通过设计更高分辨率测控电路[40]或提高加工与装配精度2方面来降低误差,提高精度。不断减小半球谐振陀螺的体积、成本、功耗等性能是推进半球谐振陀螺发展的必然趋势。未来需要在保证半球谐振陀螺的精度与可靠性等优势的前提下,不断减小整个半球谐振陀螺惯导系统的成本、体积、质量和功耗,使整个惯导系统的C+SWaP优于其他传统陀螺。
3)在海洋导航领域将取代光学陀螺。随着科研水平的提高和制造工艺的发展,半球谐振陀螺的各项性能得到改善,导航的精确性、连续性、可靠性、价格成本等优势越来越突出。在未来几十年,半球谐振陀螺将取代光学陀螺,成为新一代海洋导航惯性导航系统惯性器件的可能性很大。
5 结束语
半球谐振陀螺是1种新型的固态振动陀螺,具有高精度、高可靠性、长使用寿命等优点,已经在航空航天领域得到了广泛应用,各方面性能都得到验证。半球谐振陀螺技术将进一步发展,应用也会更加普遍,在海洋导航领域的应用也有着较好的发展前景。但是国内半球谐振陀螺研制技术尚处于起步阶段,与国外有着较大的差距,精度和尺寸等性能参数有进一步提升的空间。半球谐振陀螺技术的发展,对我国的国防安全和科技发展有着重要的作用,对综合定位、导航、授时(positioning, navigation and timing, PNT)体系的建设有重要意义。
[1] PERSSON A. How do we understand the Coriolis force ?[J]. Bulletin of the American Meteorological Society, 1998, 79(7): 1373-1386.
[2] ROZELLE D M. The hemispherical resonator gyro: from wineglass to the planets[C]//Space Flight Mechanics Committee. Proceedings of the 19th AAS/AIAA Space Flight Mechanics Meeting. Savannah, USA: Space Flight Mechanics Committee, 2009: 1157-1178.
[3] 吕志清. 半球谐振陀螺在宇宙飞船上的应用[J]. 压电与声光, 1999, 21(5): 349-353.
[4] Anon. Northrop Grunnan′s hemispherical resonator gyro matks 30 million operating hours in space[EB/OL]. [2019-10-26]. http://news.northropgrumman.com/news/leleases/Northrop-grumman-s-hemispherical-resonator-gyro-marks-30-million-operating-hours-in-space.
[5] 毛海燕, 梁宇, 袁小平, 等. 半球谐振陀螺现状及发展趋势[J]. 压电与声光, 2014, 36(4): 584-587.
[6] 高胜利. 半球谐振陀螺的分析与研究[D]. 哈尔滨: 哈尔滨工程大学, 2008.
[7] 方针, 刘书海, 余波. 半球谐振陀螺的基础理论研究[J]. 导航定位与授时, 2017, 4(2): 72-78.
[8] 徐志强, 刘建梅, 王振, 等. 石英半球谐振子精密加工技术探讨[J]. 导航与控制, 2019, 18(2): 69-76.
[9] 杨倩. 基于半球谐振陀螺的惯性导航系统研究[D]. 哈尔滨: 哈尔滨工业大学, 2007.
[10] WANG X, WU W, LOU B, et al. The modeling of hemispherical resonator gyro and its space applications[C]//The International Society for Optics and Photonics (SPIE). Proceedings of the 7th International Symposium on Precision Engineering Measurements and Instrumentation. Yunnan, China: SPIE, 2011: 8321-8324.
[11] MATTHEWS A, RYBAK F J. Comparison of hemispherical resonator gyro and optical gyros[J]. IEEE Aerospace and Electronic Systems Magazine, 1992, 7(5): 40-46.
[12] 于翔宇, 张岚昕, 段杰, 等. 全角模式半球谐振陀螺振型控制与角度检测[J]. 导航与控制, 2019, 18(2): 33-38, 76.
[13] 赵万良, 成宇翔, 孙殿竣, 等. MEMS半球谐振陀螺的角速度积分及其FPGA设计[J]. 半导体光电, 2017, 38(1): 40-44.
[14] 王旭, 吴文启, 方针, 等. 力平衡模式下半球谐振陀螺正交误差控制[J]. 仪器仪表学报, 2012, 33(4): 936-941.
[15] TRUSOV A A, PHILLIPS M R, MCCAMMON G H, et al. Continuously self-calibrating CVG system using hemispherical resonator gyroscopes[C]//The Institute of Electrical and Electronic Engineers(IEEE). Proceedings of 2015 IEEE International Symposium on Inertial Sensors and Systems (ISISS). Hapuna Beach, USA: IEEE, 2015: 1-4.
[16] BRYAN G H. On the beats in the vibrations of a revolving cylinder or bell[C]//University of Cambridge. Proceedings of the Cambridge Philosophical Society. Cambs, UK: University of Cambridge, 1890, 7(24): 101-111.
[17] LYNCH D D, MATTHEWS A, VARTY G T. Innovative mechanizations to optimize inertial sensors for high or low rate operations[C]//German Society for Positioning and Navigation. Proceedings of Symposium Gyro Technology. Stuttgart, Germany: German Society for Positioning and Navigation, 1997: 109-130.
[18] DICKINSON J, STRANDT C R. HRG strapdown navigator[C]//The Institute of Electrical and Electronic Engineers(IEEE). Proceedings of the IEEE Symposium on Position Location and Navigation. Las Vegas, USA: IEEE, 1990: 110-117.
[19] ANTHONY M. The operation and mechanization of the hemispherical resonator gyroscope[C]//The Institute of Electrical and Electronics Engineers (IEEE). Proceedings of the 2018 IEEE/ION Position, Location and Navigation Symposium (PLANS). Monterey, USA: IEEE, 2018: 7-14.
[20] LOPER E J, LYNCH D D. Hemispherical resonator gyro-status report and test results[C]//Institute of Navigation. Proceedings of the National Technical Meeting. San Diego, USA: Institute of Navigation, 1984: 105-107.
[21] 郭宗本. 旋转调制式捷联惯导系统初始对准技术研究[D]. 北京: 北京航空航天大学, 2008.
[22] 杨建业, 汪立新, 张胜修, 等. 半球谐振陀螺旋转惯导系统误差抑制机理研究[J]. 宇航学报, 2010, 31(10): 2321-2327.
[23] 潘瑶, 曲天良, 杨开勇, 等. 半球谐振陀螺研究现状与发展趋势[J]. 导航定位与授时, 2017, 4(2): 9-13.
[24] MEYER D, ROZELLE D. Milli-HRG inertial navigation system[J]. Gyroscopy and Navigation, 2012, 3(4): 227-234.
[25] 彭慧, 方针, 谭文跃, 等. 半球谐振陀螺发展的技术特征[J]. 导航定位与授时, 2019, 6(4): 108-114.
[26] REMILLIEUX G, DELHAYE F. Sagem Coriolis vibrating gyros: a vision realized[EB/OL]. [2019-10-26]. https: //www. researchgate. net/publication/283814118_Sagem_Coriolis_Vibrating_Gyros_A_vision_realized.
[27] CLERC S, MARTELLA P, DURRANT D, et al. Development of the european IMU for space applications[C]//Aerospace Research Central (ARC). Proceedings of the AIAA Guidance, Navigation, and Control Conference. Florida, USA: ARC, 2009: 5870.
[28] JEANROY A, BOUVET A, REMILLIEUX G. HRG and marine applications[J]. Gyroscopy and Navigation, 2014, 5(2): 67-74.
[29] DELHAYE F. HRG by SAFRAN: the game-changing technology[C]//The Institute of Electrical and Electronic Engineers(IEEE). Proceedings of the 5th IEEE International Symposium on Inertial Sensors and Systems (INERTIAL). Lake Como, Italy: IEEE, 2018: 1-4.
[30] 薛连莉, 戴敏, 葛悦涛, 等. 2018年国外惯性技术发展与回顾[J].飞航导弹, 2019(4): 16-21.
[31] DELEAUX B, LENOIR Y. The world smallest, most accurate and reliable pure inertial navigator: ONYX™[C]//IEEE Aerospace and Electronic Systems Society (IEEE AESS). Proceedings of the 2018 DGON Inertial Sensors and Systems (ISS). Braunschweig, Germany: IEEE, 2018: 1-24.
[32] 吕志清. 半球谐振陀螺(HRG)研究现状及发展趋势[C]//中国惯性技术学会. 2003年惯性技术科技工作者研讨会论文集. 北京: 中国惯性技术学会, 2003: 106-108.
[33] 方针, 余波, 彭慧, 等. 半球谐振陀螺技术发展概述[J]. 导航与控制, 2015, 14(3): 2-7.
[34] 帅鹏, 魏学宝, 邓亮. 半球谐振陀螺发展综述[J]. 导航定位与授时, 2018, 5(6): 17-24.
[35] 石岩, 席翔, 吴学忠, 等. 微半球谐振陀螺技术研究进展[J]. 导航与控制, 2019, 18(2): 1-8.
[36] LI W, XI X, LU K, et al. A novel high transduction efficiency micro shell resonator gyroscope with 16 T-shape masses using out-of-plane electrodes[J]. IEEE Sensors Journal, 2019, 19(13): 4820-4828.
[37] 刘飞, 马林. 舰艇惯性导航技术现状及发展趋势[J]. 中国造船, 2011, 52(4): 282-293.
[38] 许江宁. 浅析水下PNT体系及其关键技术[J]. 导航定位与授时, 2017, 4(1): 1-6.
[39] 张钰莹, 张卫, 崔峰, 等. 基于FPGA的压电半球谐振陀螺数字测控系统设计[J].半导体光电, 2019, 40(3): 313-317.
[40] 何杰, 朴继军, 朱玲瑞, 等. 先进微陀螺器件及微惯性测量单元最新研究进展[J].压电与声光, 2019, 41(3): 410-415.
[41] 庄须叶, 王世和, 李平华, 等. 微型化半球陀螺制备工艺发展现状及趋势分析[J].导航与控制, 2019, 18(2): 52-60.
[42] 汪红兵, 林丙涛, 梅松, 等. 微半球谐振陀螺技术研究进展[J].微纳电子技术, 2017, 54(11): 772-780.
Application of hemispheric resonant gyro in marine navigation and positioning
LI Ding, XU Jiangning, HE Hongyang
(College of Electrical Engineering, Naval University of Engineering, Wuhan 430033, China)
In order to further study on the inertial navigation system, the paper introduced a solid-state vibrating gyroscope with high precision, high stability and long service life: the structure and working principle of the hemispheric resonant gyro were given, and the domestic and foreign development history, research status and practical application were described, finally the development potential and development trend of hemispherical resonant gyro in marine navigation and positioning were analyzed.
hemispherical resonant gyro; navigation; inertial technology; marine navigation
P228
A
2095-4999(2020)03-0023-09
李鼎,许江宁,何泓洋. 半球谐振陀螺在海洋导航定位中的应用[J]. 导航定位学报, 2020, 8(3): 23-31.(LI Ding, XU Jiangning, HE Hongyang. Application of hemispheric resonant gyro in marine navigation and positioning[J]. Journal of Navigation and Positioning, 2020, 8(3): 23-31.)
10.16547/j.cnki.10-1096.20200304.
2019-12-16
国家重点研发计划项目(2016YFB0501700, 2016YFB0501701)。
李鼎(1997—),男,湖南益阳人,硕士研究生,研究方向为惯性技术及应用。
许江宁(1964—),男,江西九江人,博士,教授,研究方向为惯性技术及应用。
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
舰船科学技术(2022年10期)2022-06-17
舰船科学技术(2022年10期)2022-06-17
中国典型病例大全(2022年12期)2022-05-13
导航定位与授时(2022年1期)2022-02-18
军民两用技术与产品(2021年7期)2021-10-13
科学与财富(2021年33期)2021-05-10
数字海洋与水下攻防(2020年5期)2021-01-04
现代电子技术(2015年15期)2015-08-14
计算技术与自动化(2014年1期)2014-12-12
