
基于Lora无线技术的多路盆栽植物蒸散测量系统研发
2020-06-11 09:46郑勇东赵全明薛绪掌张钟莉莉汪淑娟
节水灌溉 2020年3期
郑勇东,赵全明,张 馨,薛绪掌,张钟莉莉,汪淑娟
(1.河北工业大学电子信息工程学院,天津 300401;2.北京农业智能装备技术研究中心,北京 100097;3.北京农业信息技术研究中心,北京 100097;4.昆明理工大学,昆明 650093)
0 引 言
植物蒸散量包括土壤蒸发量和植物蒸腾量,在土壤-植物-大气(SPAC)动态系统中,蒸散作为植物水文循环中的重要组成部分,与植物的各项生理活动和生物产量的形成有着密切的联系,对植物的影响贯穿于整个生长周期[1,2]。蒸散量的准确测量对于植物耗水规律的探索、灌溉模型的建立和生理参数的计算均有着重要的意义。
目前对于植物蒸散耗水量的计算方法主要包括水平衡法、红外遥感法、空气动力学法、波文比-能量平衡法和蒸渗仪法等[1,3-5]。在科学实验中更多选择蒸渗仪法来直接测定植物的蒸散量[6]。该方法主要通过蒸渗仪来测量植物的蒸散量,其依据水量平衡原理,通过单位时间内植株-土壤整体质量的变化来直接反映水分的蒸散[7]。称重式蒸渗仪有直接称重式、杠杆式、位移式等不同的结构类型,但其主要用于大田作物蒸散的测定,存在结构复杂、安装成本高等问题,极大限制了应用范围[7-10]。近几年针对盆栽植物的连续称重技术在国外被广泛应用,通过在线监测植物整个生长周期的重量变化,快速识别植物对外部环境条件的响应[11]。基于植物的称重数据和大气土壤环境数据能够进一步计算植物的蒸散速率、生长速率、水分利用率和气孔导通度等其他生理参数,实现植物生长、生理等生命信息的无损、快速和准确获取[12-15]。生产应用方面荷兰Paskal 公司采用无线称重单元观察和分析植物生长速率、蒸散速率,通过分析温室环境对植物的影响来优化植物生长环境,Ridder、Priva也有类似的水培称重系统解决方案[16]。国内在进行盆栽植物耗水实验时,一般借助于商业电子秤定期进行称重并手抄记录,测量时需要来回搬运,增加了实验现场的工作量和系统测量误差[17]。现有专用于测定盆栽植物蒸散量设备很少,均为单点式测量,通讯方式多为有线,对于多点式测量时,盆栽密集度增高,布线量明显上升,给现场工作带来很大不便;功耗普遍较大,采用电源线进行供电,对于未接通电源场景的应用有局限性;结构上不灵活,可移动性差,有待进一步改进[18,19]。
针对上述问题,本文从结构设计、数据采集、数据传输三方面入手,开发了一套基于Lora无线技术的多路盆栽植物蒸散测量系统,用以实现多路盆栽植物整个生长周期的连续称重,实时监测盆栽植物的蒸散量。将搭建的无线称重系统与大气传感器共同组建实验平台,对盆栽生菜的耗水特性和环境相关性展开分析,验证了设备的适用性和可靠性。
1 系统架构设计
无线称重系统采取上下位机结构,整个系统由工业平板电脑和各个独立的称重单元组成,两者通过无线方式进行通讯。系统设定采样周期后,各个节点周期性唤醒采集数据并上传至电脑端,实现系统的远程在线监测,系统框架见图1。

图1 称重系统架构图Fig.1 Weighing system architecture diagram
2 结构设计
称重结构可分为支撑式和悬挂式两种,考虑到设备应具有一定的稳定性和灵活性,能够抵抗部分的外界干扰,也可方便移动,本文最终选用支撑式称重单元结构。秤体结构使用AutoCAD 2007设计,结构见图2。称重单元主要由秤盖、上部支架、下部支架、压力传感器和脚杯五部分组成,结构简单,稳定性好,能够抵抗一定程度的外部干扰,组装后也可以方便搬移。
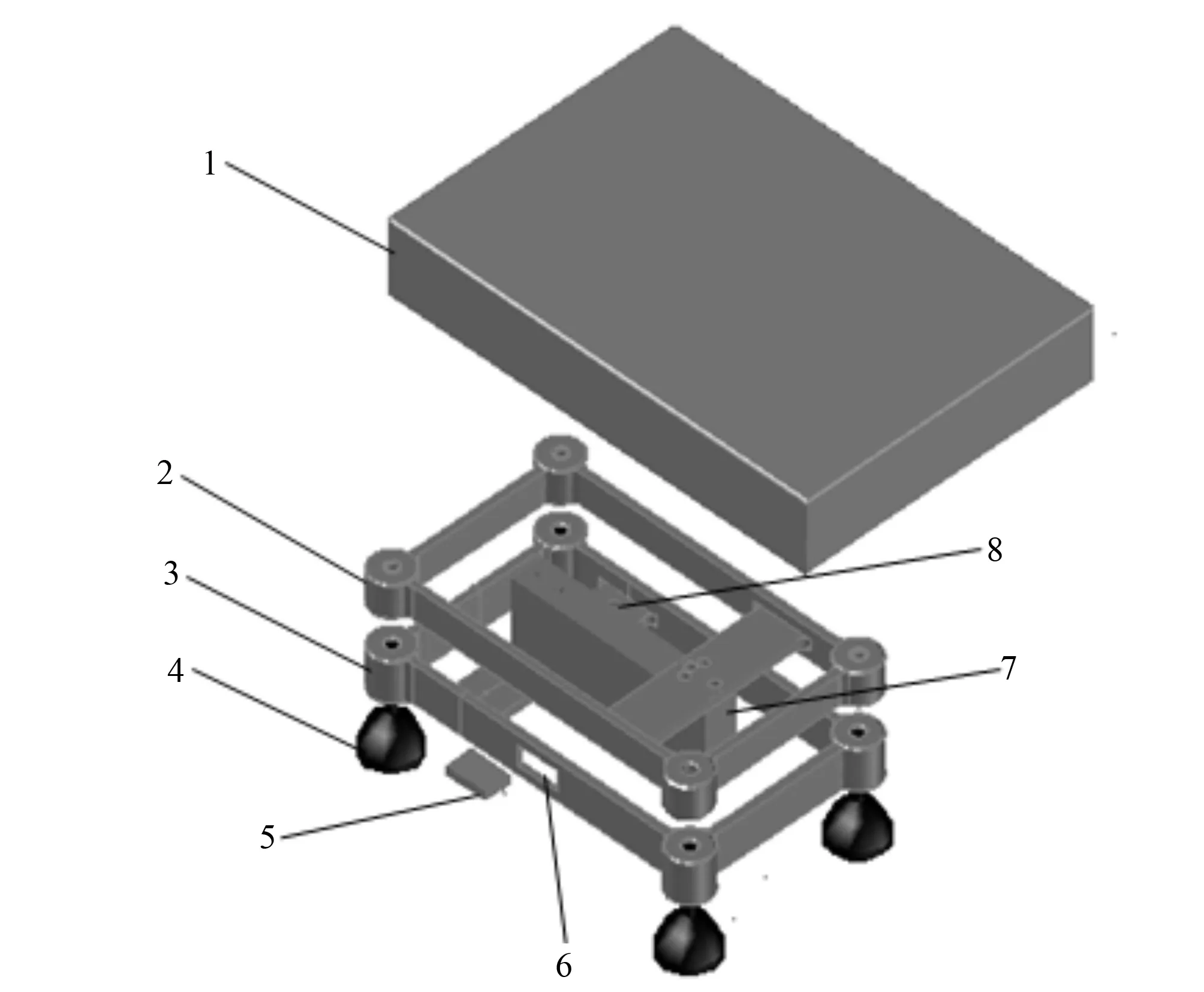
1-秤盖;2-上支架;3-下支架;4-脚杯;5-数据采集板;6-屏幕显示窗口;7-称重传感器;8-水平仪图2 称重结构模型图Fig.2 Weighing structure model diagram
3 硬件设计
硬件结构见图3,包括主控制器、电源、数据采集、数据显示、数据存储和通信模块六个部分。其中主控制器部分负责协调各个部件的正常运行,电源部分将输入的电压转化为系统所需的工作电压,数据采集用来采集重量信息,数据显示用来显示系统信息、实时时间和物体重量,数据存储用于存储系统参数和备份采集的重量和时间信息,通信模块负责采集节点和工业平板电脑之间的数据传输。

图3 硬件结构图Fig.3 Hardware structure diagram
3.1 称重传感器选型
由于采用的是支撑式称重结构,故选用压力式称重传感器。称重传感器宜工作在其量程的30%~70%,而对于一般小型盆栽植物总重量在12 kg左右,所以额定量程应选为20 kg[7]。综合考虑传感器的精度和抗蠕变、温漂等特性,本文最终选用HBM公司的PW15AH(20 kg)六线制单点式压阻传感器,最大分度数3 000,灵敏度2.0±0.2 mV/V,非线性误差0.016 6%,温度对灵敏度的影响0.017 5%,具有准确度高、线性好、稳定等特点。
3.2 主控制器
控制器部分选用STM32的低功耗系列 L431CCT6设计,只需要极少的外围器件即可搭建最小系统。该芯片基于Contex-M4内核,片内集成256 kB的Flash以及64 kB的RAM,时钟频率最高可达80 MHz。外设资源丰富,共有38个I/O引脚可供外部使用,包括3个SPI,3个I2C,1个CAN,3个U(S)ART,1个低功耗LPUART和RTC,全速工作时工作电流仅为6.72 mA。
3.3 称重数据采集
数据采集部分选用海芯科技公司的HX712电子秤专用高精度A/D转换芯片,片内集成128增益的低噪声放大器和24位A/D转换器,无需外部时钟振荡器,可为压力传感器供电。芯片通过两根串口线与控制器通信,无需芯片内部寄存器编程,时钟脉冲个数可直接配置输入通道和数据输出速率。片内集成传感器电源MOS开关,可在芯片断电时关闭传感器电源,减少功耗,工作电流仅为1 mA。电路原理图见图4,其中R8、R9用于减少传感器的工作电流,R10、R11与C12、C15、C16构成芯片模拟信号的前端输入滤波,滤除高频干扰。

图4 压力传感器采样电路图Fig.4 Pressure sensor sampling circuit diagram
3.4 无线数据通信
无线通信方式选用低功耗广域网技术中的Lora技术,该技术融合了扩频通信、数字信号处理和纠错编码技术,具有功耗低、成本低、距离远等优点,非常适用于电池供电的远距离、小数据量发送的设备[20-22]。安美通科技公司的APC340模块以SX1278为核心设计,采用Lora扩频调制方式,有多个频道选择,可在线修改收发速率,发射功率等参数。模块采用透明传输方式,能够适应不同的用户协议,实现一对一和一对多的组网通信。模块通过UART 与MCU进行数据传输,一次最多可以传输256字节的数据,支持四种工作模式,各模式之间可以任意切换,睡眠模式下待机电流仅为2.5 uA,最大通信距离可达3 000 m。综合考虑,设定系统工作频率为435 MHz,带宽125 kHz,扩频因子9,空中速率4.56 kbps,发射功率100 mW。
3.5 数据显示与存储
数据显示部分采用SSD1306控制器的0.91寸OLED,选用SPI接口与主控制器通信。数据存储部分采用NOR Flash类型的W25Q64,存储空间为8 MB,支持字节和扇区写入,与主机通过SPI接口通信。Flash的前3个扇区用来存储系统的参数,包括系统零点、线性系数、扇区号,从第4扇区开始存储时间和重量信息。
3.6 电源部分
电源部分选用TI公司的TPS61221升压芯片,整个采集节点使用两节碱性电池供电,通过电源芯片将干电池提供的3 V电压升压至3.3 V,对射频部分和主电路部分采用独立供电,提高系统的稳定性。整个电路通过0R的电阻将模拟地与数字地分开,以减少两个部分的干扰。
制作焊接电路板,将称重单元和采集节点连接,系统实物见图5。
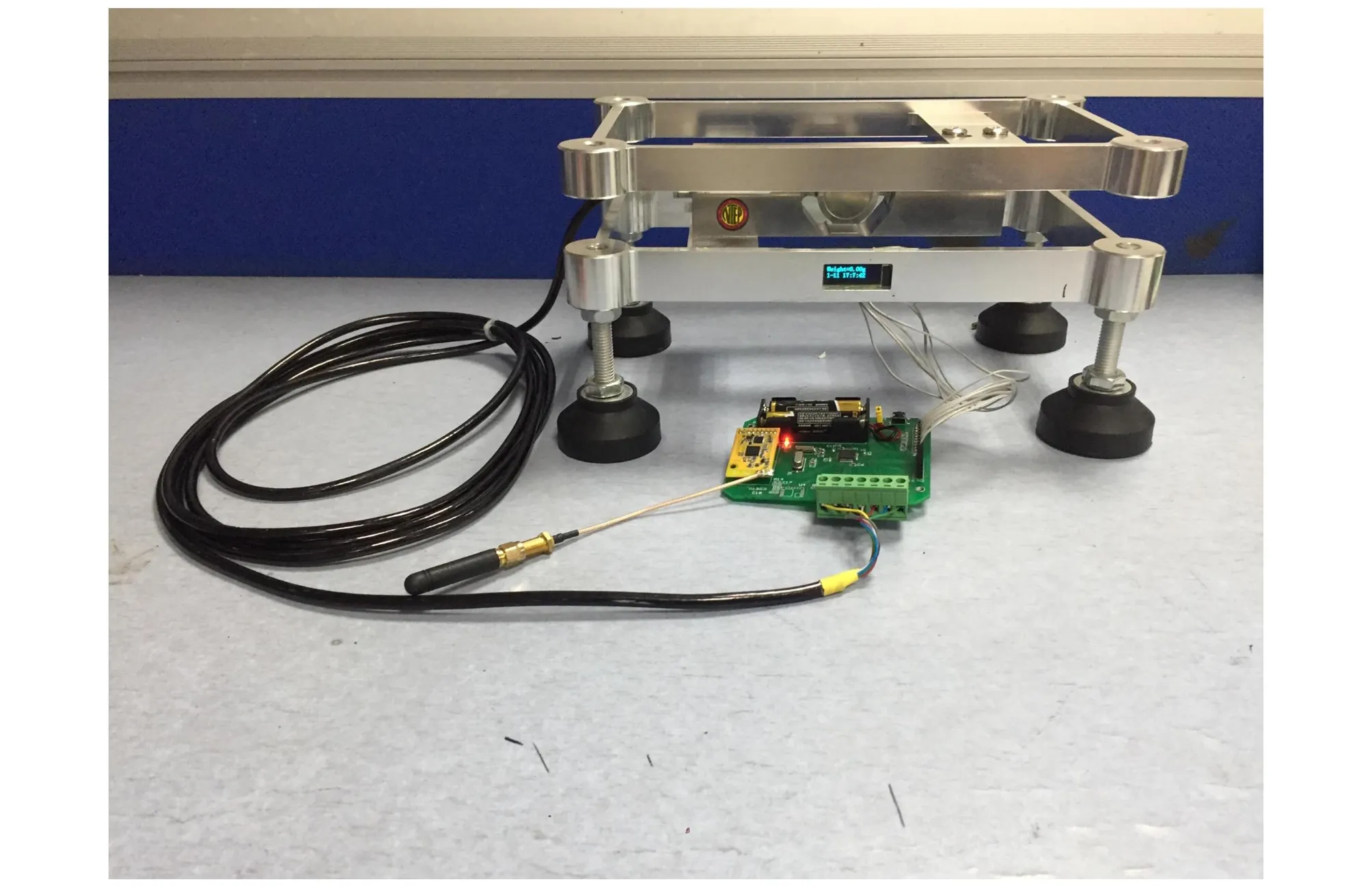
图5 系统实物图Fig.5 Material object diagram of system
4 软件设计
系统的软件设计分为采集节点和电脑软件两个部分。
4.1 采集节点软件设计
采集节点的软件部分使用STM32 CubeMX5.1.0和Keil5.24.1工具联合开发,简化开发流程,提高代码的可视性。主要内容包括硬件初始化、数据采集与处理、OLED显示、数据存储、数据传输五个部分,软件设计流程见图6。

图6 采集节点软件流程图Fig.6 Software flow diagram of acquisition node
4.1.1 主程序设计
节点上电以后对系统硬件进行初始化设置,并从Flash中读取系统参数,根据拨码开关选定工作模式。在数据采集模式下使用自定义协议,采集节点通过RTC中断定期唤醒完成数据采集、存储、显示,在向主机发送数据后将进入低功耗模式。在修改参数模式下,遵循Modbus-RTU协议,工业平板电脑向节点发送命令,节点通过串口解析命令并执行相关功能码的具体操作,最后向主机做出应答。
4.1.2 称重数据处理
为了消除外界干扰,提高数据采集的精度,采用中位值平均滤波对采集的数据进行处理,并加入了零点跟踪,在给定的最大漂移量内系统自动更新零点,数据处理流程见图7。中位值平均滤波部分系统依次采集12个值,去除12个值中的最大值和最小值,并对剩余的10个值求算术平均值,将该值作为一次采样值,如式(1)所示:
(1)
式中:xmax为12个采样值中的最大值;xmin为12个采样值中的最小值。

图7 称重数据处理流程图Fig.7 Weighing data processing flow diagram
4.1.3 系统通讯协议
在数据采集模式下,系统采用30个字节的自定义协议帧,协议帧结构见图8。

固定标识节点ID设备号数据域固定标识校验域3Bytes1Byte7Bytes16Bytes1Byte2Bytes
图8 自定义协议帧
Fig.8 Structure of the custom protocol
在参数修改模式下,系统采用Modbus-RTU协议,协议帧结构见图9。

地址域功能码数据域差错校验1Byte1ByteN·Bytes2Bytes
图9 Modbus-RTU协议帧结构
Fig.9 Structure of the Modbus-RTU protocol
4.2 电脑软件设计
电脑软件部分使用VS2010开发工具,选用C#设计编写,分为系统显示,修改参数和数据查询三个部分,软件通过USB网关接收节点上传数据。系统显示将各个节点上传的数据实时显示在界面上,保存为Excel文件,并以折线图的方式展示;修改参数可以选定通道,设置节点零点和传感器线性值等参数;数据查询可以查看各盆植物历史重量的变化趋势。软件界面见图10。

图10 软件界面Fig.10 Software interface
5 实验验证
5.1 称重传感器性能测试
5.1.1 称重传感器标定
压力传感器输出电压值和加载重量之间的线性关系:
(2)
式中:V1为空载电压;V2为加载电压;K为传感器线性系数;W为重量值。
通过2、4、6、8 kg的砝码对压力传感器的输入(重量)和输出(电压采样值)进行拟合,拟合后测量精度可达1 g,拟合结果见图11。
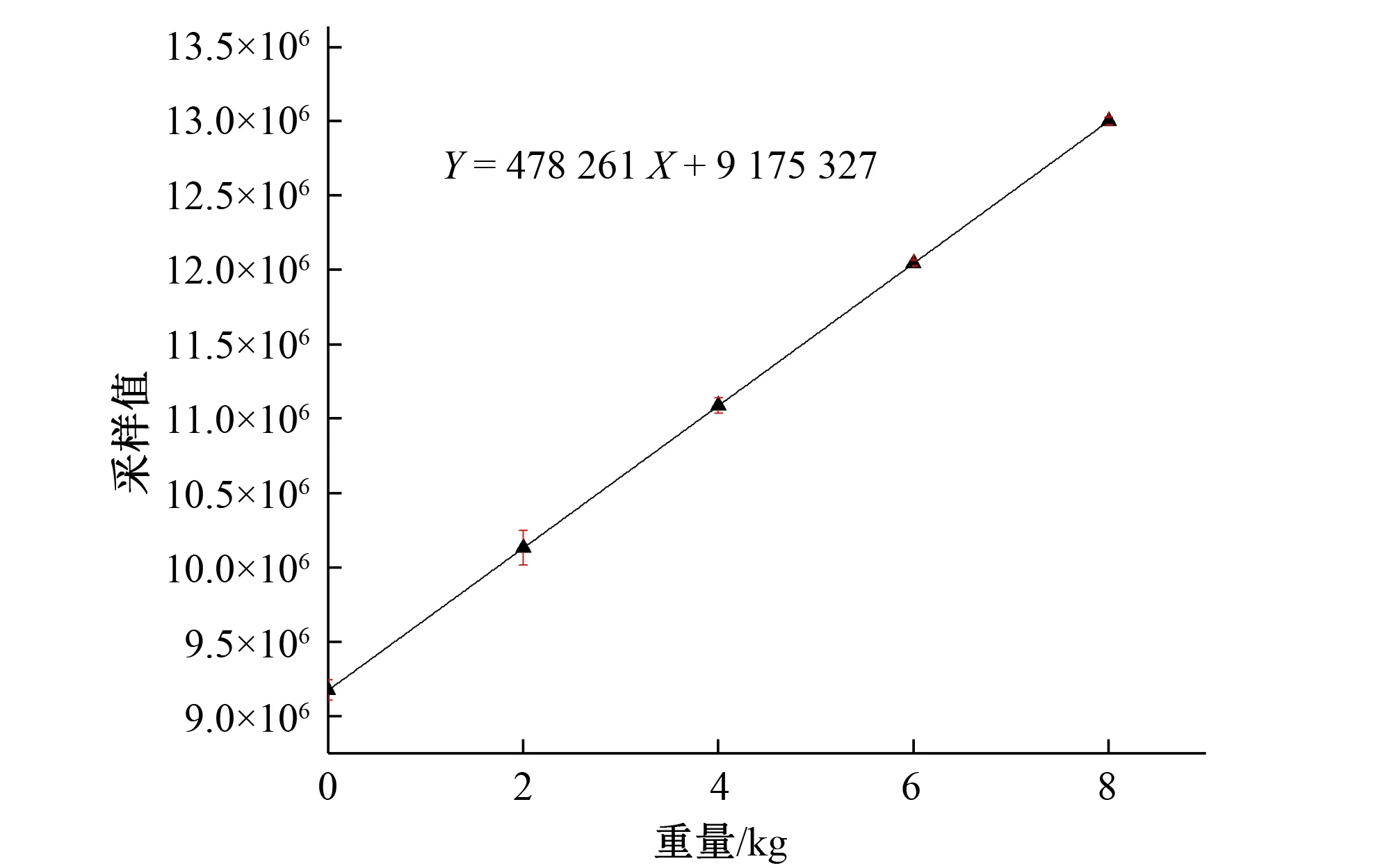
图11 线性拟合Fig.11 Linear fit
5.1.2 长期稳定性测试
对于应变式压力传感器,在长时间外力作用下传感器内部的应变片会发生蠕变,导致在固定压力下传感器的输出会随时间发生变化,从而影响测量精度。为了检测由于压力传感器的蠕变特性所引起的系统误差,本文在系统连续15 d在线称重的情况下,选取3.5、8和10 kg三组砝码每天对系统误差进行测试,测试结果见图12。从图中可以看出连续15 d在线称重,三组砝码测得的系统误差均在1 g以内。对于盆栽作物整个生长周期的连续在线称重,系统可以保持较高的测量精度。

图12 稳定性测试Fig.12 Stability test
5.1.3 温漂特性测试
压阻式压力传感器是基于惠更斯电桥将压力转换为电信号,受应用场景温度的变化,电桥输入与输出无法保持理想的线性关系,传感器会产生温度漂移,造成测量误差。本文使用北京切克试验设备有限公司的高低温交变湿热实验箱,测量了-10~50 ℃温度变化范围内的系统误差,结果见图13。从图中可以看出在0~30 ℃温度变化范围内,系统的最大误差不超过1 g,在-10、40和50 ℃时系统误差最大为4 g。因此对于一般盆栽作物的生长环境,系统可以保持较高的测量精度。

图13 温度特性测试Fig.13 Temperature characteristic test
5.1.4 功耗测试
节点正常工作状态下发射信号的最大电流为56 mA,休眠状态下的最大电流为70 uA。采用两节容量为15 000 mAh的碱性电池供电,采样间隔为5 min,工作时间可达120 d以上,能够实现植物整个生长周期的监测。
5.2 盆栽生菜实验验证
实验于2018年12月4日至2019年1月15日在北京市农林科学院小汤山基地日光温室内进行,以波士顿奶油生菜为实验对象,对生菜的整个生长周期进行监测。实验用盆直径34 cm,盆高30 cm,盆内种植1棵生菜,8盆生菜南北朝向排成一列依次放在温室地面,各盆之间间隔20 cm,每棵生菜由1根滴箭灌溉,平均每隔5 d灌水一次,整个生长周期共灌水8次。实验现场见图14。

图14 实验现场图Fig.14 Field diagram of experiment
盆栽植物的重量信息通过无线称重系统测量,从南到北依次对应系统的8个测量通道,系统采样间隔为5 min。环境信息通过Decagon公司的EM50数据采集器进行采集,采样间隔同样设置为5 min。采集器采集的指标为空气温湿度、太阳总辐射、土壤温度、湿度和电导率,其中空气温湿度通过SHT75传感器测定,太阳总辐射量通过PYR传感器测定,土壤三参数通过GS3传感器测定。
5.2.1 蒸散量
植物的日蒸散量可以通过当日零点(W1)和次日零点(W2)的称重传感器读数差值进行计算,如式(3)所示。
ETd=W1-W2
(3)
式中:ETd为每日蒸散量,g;W1为当日00∶00前后两个采样时刻重量的平均值,g;W2为次日00∶00前后两个采样时刻重量的平均值,g。
选取1月4日(晴天)和1月7日(阴天)两盆生菜数据进行分析,此时植株已经基本成型,蒸散作用相对较强,由于两天间隔较短,生理差异可以忽略。两盆生菜全天重量的动态变化曲线见图15,从图15中可以清晰看出晴天的蒸散量要明显大于阴天,两天生菜的重量均在11∶00到17∶00期间呈现出清晰的下降趋势,植物的蒸散主要发生在这段时间。上述分析表明该设备可以详细记录盆栽生菜全天的重量变化信息,呈现出全天各个时段蒸散强度的动态变化趋势。
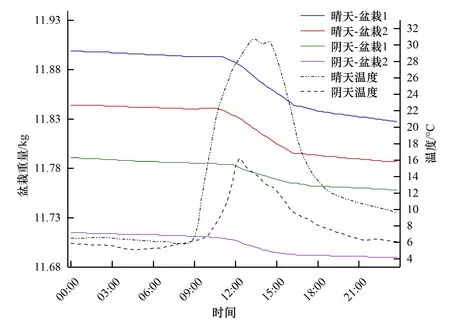
图15 日重量变化Fig.15 Daily weight variety
整个生长周期生菜日蒸散量的变化曲线见图16(a),前期(前12 d)的平均日蒸散量分别为44.67和39.92 g,中后期(12 d以后)的平均日蒸散量分别为60.84和48.32 g,中后期的日蒸散速率要高于前期的日蒸散速率。整个生长期生菜的累积日蒸散量图见16(b),两盆生菜的累积日蒸散量分别为2.422和1.977 kg,累积速率总体上呈现出了先增加后减少的趋势。根据重量数据计算的生菜日蒸散量和累积日蒸散量,能够清楚展现出生菜在不同生长时期对水分的需求量,描述植物在整个生长周期的耗水特性。

图16 蒸散量变化Fig.16 Evapotranspiration variety
5.2.2 环境相关性分析
选取2018.12.25到2019.1.2连续9 d的称重数据与环境数据进行分析,环境因素主要考虑空气温湿度、太阳辐射量对生菜蒸散速率的影响。饱和水汽压差常用来描述空气的干燥程度,其影响着植物气孔的闭合,对植物的生理活动有重要的影响,可由空气温度和湿度估算[23]。
(4)
式中:VPD为饱和水汽压差,kPa;RH为相对空气湿度,%;t为空气温度,℃;0.611为0 ℃时的饱和水气压,kPa。
饱和水汽压和太阳辐射量的变化曲线见图17(a),从早上开棚后开始逐渐增高,中午达到峰值后又逐步下降。两盆生菜重量变化曲线见图17(b),两盆生菜重量的变化趋势一致,图中箭头所指的两个重量突变点表示进行了灌溉。盆栽土壤含水量变化曲线见图17(c),在灌溉操作后土壤含水率呈现出了清晰的上升趋势。小时蒸散速率变化曲线见图17(d),单天内呈现出先增加后减少的峰值曲线变化趋势。对比图17(a)和图17(d)可以看出蒸散速率的变化趋势与太阳辐射量和饱和水气压差的变化趋势一致,蒸散作用主要发生在白天。每日开棚后温室内太阳辐射量增加,饱和水气压差增加,生菜气孔导通度增大,生菜的蒸散速率也逐渐上升,在12∶00-14∶00点间达到峰值,下午变化相反。对比图17(c)和图17(d),在灌水后土壤含水率上升,土壤中可供生菜利用的水分增加,根通量增大,生菜的蒸散速率明显升高。

图17 周期数据Fig.17 Periodic data
基于上述的变化趋势,选取2018.12.25到2019.1.15的数据,将日蒸散量与太阳辐射量、饱和水汽压差进行相关性分析,结果见图18。分析结果均呈正相关,与太阳总辐射的R2=0.86,与大气饱和水汽压的R2=0.78。蒸散速率与环境相关程度的顺序是太阳总辐射>大气饱和水汽压,与现有的研究基本一致[24]。

图18 相关性分析Fig.18 Correlation analysis
6 结 语
为了实时监测盆栽植物在整个生长过程中的蒸散变化,本文针对现有研究中所存在的问题进行了改进,提出了一套测定多路盆栽植物蒸散量的装置,研究结论如下。
(1)使用STM32L低功耗系列设计了一套基于Lora无线技术的多路盆栽植物蒸散测量系统,该系统可以同时测定8路盆栽植物,且方便进行扩展,能够实现植物的远程在线称重。通过实验对系统进行了测试,测试结果表明该系统具有精度高、稳定性好、功耗低等特点,能够满足一般小型盆栽植物蒸散量测量的需求。
(2)基于无线称重系统和环境传感器对盆栽生菜整个生长周期内的耗水规律进行了研究,验证了设备的可行性。生菜每日的蒸散主要在11∶00-17∶00之间,整个生长期日蒸散速率呈现先增加后减少的趋势,中后期要高于前期。经相关性分析,生菜的日蒸散量与太阳辐射量、大气饱和水汽压有着密切的关系。实验结果与现有研究基本一致,验证了该系统的可行性和可靠性,能够应用到实际的农业生产活动中,为数字化农业提供技术与装备支撑。
猜你喜欢
中老年保健(2022年6期)2022-08-19
小星星·阅读100分(低年级)(2020年8期)2020-10-26
文苑(2020年6期)2020-06-22
童话世界(2020年8期)2020-06-15
红领巾·探索(2020年3期)2020-05-19
小学生学习指导(高年级)(2019年4期)2019-11-27
食品与健康(2017年3期)2017-03-15
美食堂(2017年2期)2017-02-14
诗潮(2014年7期)2014-02-28
阅读与作文(英语高中版)(2013年8期)2013-08-20
