一种搜索导航航路点信息的验证方法
2020-06-11 13:46:36刘经纬
电子技术与软件工程 2020年3期
刘经纬
(中国直升机设计研究所 江西省景德镇市 333001)
1 引言
为了验证搜索导航航路点信息计算是否正确,本文针对常见的三个搜索导航模式,提出相应的较为简便的搜索导航航路点信息验证方法。
2 搜索导航简介
目前国内主要使用扇形搜索、盒形搜索、梯形搜索三种搜索导航,其搜索方式分别如下:
扇形搜索导航是实现飞行器按照扇形进行搜索的导航模式,如图1所示。扇形搜索需要设定的参数有:起始点经纬度,初始航向,顺逆时针搜索,搜索扇形的扇面角度和搜索扇形的半径。
盒形搜索导航是实现飞行器按照盒形进行搜索的导航模式,如图2所示。盒形搜索需要设定的参数有:起始点经纬度,初始航向,顺逆时针搜索,搜索增量S。
梯形搜索导航是实现飞行器按照梯形进行搜索的导航模式,如图3所示。梯形搜索需要设定的参数有:起始点经纬度,初始航向,顺逆时针搜索,横向搜索幅度Length,纵向增加步长S。
3 搜索导航航路点信息验证方法
搜索导航的航路点是由航电系统计算得出,在进行航电测试验证过程中,有必要对航路点信息是否计算正确进行验证。本文提出一种较为简便的航路点信息验证方法,该方法利用航路点信息和初始航向以外的初始条件计算初始航向,通过比较计算得出初始航向和设定的初始航向来判定航路点信息计算是否正确。接下来,本文将针对三种搜索导航方式分别进行验证方法的详细说明。由于搜索导航航线情况较多,在此,本文仅以其中一种情况作为实例说明,其余情况以此类推即可。另外,由于搜索导航航线区域较小,因此在本文中将该区域近似看为平面进行计算。
3.1 扇形搜索导航航路点信息验证方法
扇形搜索导航航路点信息验证方法以图4中的情况为例进行说明。在图4中,N指代正北方向;S0点为搜索起始点,经纬度为(X0,Y0);S1和S2为搜索导航飞行计划上的第一点和第二点,S2点经纬度为(X2,Y2);C为初始航向;A为搜索扇面角度;R为搜索半径。以S2向正北方向做垂直线,得到S2’,其经纬度为(X0,Y2)。设地球半径为L。

图1:扇形搜索示意图[1]

图2:盒形搜索示意图[1]
则S0与S2’的距离|S0 S2’|为:
文中选用BOOST电路作为DC-DC变换器的实现方式。首先分析BOOST电路的工作状态,在考虑低电压、高效率、低功耗的应用环境下,选用同步BOOST电路为主电路,采用PWM控制器方式;利用状态空间平均法得到BOOST电路的传递函数。在设计电压控制环路时,先分析了未加补偿网络时系统的开环传递函数的Bode图,根据Bode的特点和系统稳定性分析,选用III型补偿网络进行传递函数的补偿设计。

对于由S0、S2和S2’构成的三角形,即可推算得出初始航向C’为:

而S0与S2的距离|S0 S2|为R。因此,由公式(1)和(2)即可计算出推算初始航向C’。通过比较多组C与C’的值是否相同或相近即可验证扇形搜索导航航路点计算算法是否正确。
需要注意,本文选用S2而非S1作为计算点的原因是:使用S2点计算推算初始航向C’必须用到除初始航向C之外的所有其它初始条件(即起始点经纬度X0,Y0,顺逆时针搜索,搜索扇形的扇面角度A和搜索扇形的半径R),保证了对原搜索算法有充分的验证;而使用S1作为计算点是不能满足上述条件的,因此本文不选用S1作为计算点。其它两种搜索导航情况类似,因此下文不再赘述。

图3:梯形搜索示意图[1]

图4:扇形搜索验证方法示意图
3.2 盒形搜索导航航路点信息验证方法
盒形搜索导航航路点信息验证方法以图5中的情况为例进行说明。在图5中,N指代正北方向;S0点为搜索起始点,经纬度为(X0,Y0);S1和S2为搜索导航飞行计划上的第一点和第二点,S2点经纬度为(X2,Y2);C为初始航向;D为搜索增量。以S2向正北方向做垂直线,得到S2’,其经纬度为(X0,Y2)。设地球半径为L。
则S0与S2’的距离|S0 S2’|为:

对于由S0、S2和S2’构成的三角形,即可推算得出初始航向C’为:
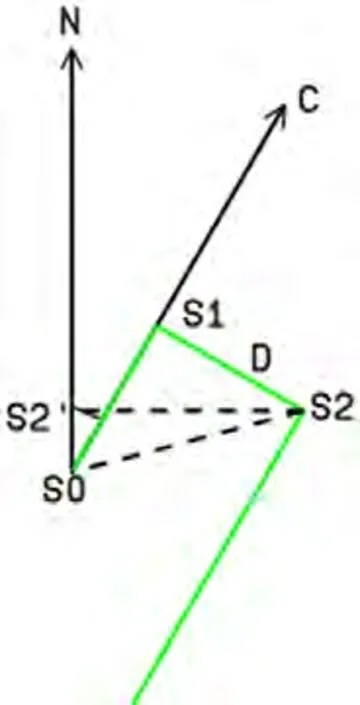
图5:盒形搜索验证方法示意图

3.3 梯形搜索导航 航路点信息验证方法
梯形搜索导航航路点信息验证方法以图6中的情况为例进行说明。在图6中,N指代正北方向;S0点为搜索起始点,经纬度为(X0,Y0);S1和S2为搜索导航飞行计划上的第一点和第二点,S2点经纬度为(X2,Y2);C为初始航向;R为横向搜索幅度;D为纵向增加步长。以S2向正北方向做垂直线,得到S2’,其经纬度为(X0,Y2)。设地球半径为L。

表1:扇形搜索实验结果

表2:盒形搜索实验结果

表3:梯形搜索实验结果
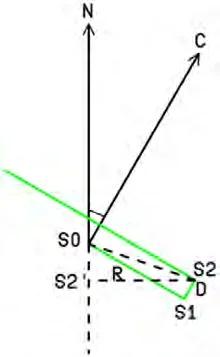
图6:梯形搜索验证方法示意图
则S0与S2’的距离|S0 S2’|为:

对于由S0、S2、S2’构成的三角形和由S0、S1、S2构成的三角形,即可推算得出初始航向C’为:

4 实验结果与分析
使用本文上述验证方法,对搜索导航实验数据进行验证得出如表1至表3所示实验结果,表1至表3分别为扇形搜索、盒形搜索和梯形搜索的实验结果。计算过程中地球半径取6378.245千米。
从表中数据可以看出,利用本文方法推算得出的初始航向与设定初始航向误差在0.02%-0.70%之间,误差较小。在扇形搜索的第6组实验数据中,扇形角度取边界值179度,误差同样在可接受范围内。计算误差主要由于本文方法将搜索导航航线所处区域近似视作平面,于非欧空间使用欧式几何导致。由于误差较小,于验证算法正确性时可以忽略不计。
以上实验结果证明,本文提出的方法可以用作搜索导航航路点信息算法的验证。
5 结束语
本文介绍了一种针对常见搜索导航航路点信息算法的验证方法。该方法利用航路点信息和和初始航向以外的初始条件计算初始航向,通过比较推算初始航向和设定初始航向来判定航路点信息计算是否正确。实验证明,这种验证方法是有效可行的。
猜你喜欢
小学生学习指导(高年级)(2021年11期)2021-11-30 10:49:26
装备制造技术(2020年9期)2021-01-26 00:14:34
———《扇形的认识》教学廖
小学教学设计(数学)(2018年10期)2018-10-20 02:53:38
数学物理学报(2017年5期)2017-11-23 07:51:31
新课程·中旬(2017年1期)2017-03-27 19:32:35
环球时报(2016-08-01)2016-08-01 07:00:24
科技经济市场(2015年12期)2016-01-21 23:11:14
海军航空大学学报(2015年3期)2015-11-11 17:18:49
中学历史教学(2015年11期)2015-11-11 07:09:09
中国民航大学学报(2015年3期)2015-03-01 01:57:13