
月球交会对接VLBI差分时延研究∗
2020-06-09 08:14刘庆会吴亚军马俊武
天文学报 2020年3期
郑 鑫 刘庆会 吴亚军 马俊武 邓 涛
(1 中国科学院上海天文台上海200030)
(2 中国科学院行星科学重点实验室上海200030)
(3 中国科学院大学北京100049)
1 引言
交会对接(Rendezvous and Docking, RVD)技术是发展航天技术、增强人类探索和开发太空资源能力的重大关键技术之一[1]. 1962年前苏联的东方3号和东方4号成功进行了首次空间交会. 1966年美国的双子星座(Gemini) 10号飞船与阿金纳(Agena)号火箭成功实现交会对接[2]. 自此, 美国和苏联都掌握了空间交会对接技术, 欧洲、日本和中国也积极开展交会对接技术的研究工作[3–4]. 2011年11月3日, 神舟8号追踪航天器与天宫1号目标航天器成功实现了首次交会对接, 我国成为继美国、俄罗斯之后第3个独立掌握交会对接技术的国家.
交会对接从距离上讲是一个由远及近的过程, 从精度上讲是一个由粗到精的过程.自动交会对接过程可划分为以下4个阶段: 交会段、对接段、组合体运行段、撤离段.交会段又分为远程导引段和自主控制段. 远程导引段的变轨通过地面控制实施. 自主控制段的交会对接任务依靠探测器上制导、导航与控制系统自主完成. 自主控制段又分为寻的段、接近段、平移靠拢段[5–9]. 探月3期任务过程中, 轨道器在环月轨道绕飞,着陆器完成月壤采样后, 择机发射上升组合体(上升器和返回器). 上升组合体进入环月轨道后, 进入交会对接段. 计划中上升组合体绕月轨道高于在轨飞行的轨道器轨道.地面测控系统通过X频段统一测控系统(Unified X-band System, UXB)和甚长基线干涉技术等测控手段连续跟踪两探测器, 并给出两器的精密轨道数据. 在此过程中, VLBI(Very Long Baseline Interferometry)带宽综合群时延是VLBI技术用于定轨定位最基本的观测量, 其对与视线垂直方向的轨道变化具有很高的灵敏度, 联合UXB, 可以快速高效高精度定轨定位. 在交会对接过程中, VLBI分系统也将开展同波束VLBI (Same-beam VLBI, SBI)观测模式, 即地面射电望远镜主波束同时接收来自轨道器和上升组合体的信号, 分别计算出两器的带宽综合群时延和主载波相关相位, 通过差分, 计算出差分群时延(Differential Group Delay, DGD)和差分相时延(Differential Phase Delay, DPD).不同于∆DOR (Delta-Differential One-Ranging)技术和差分VLBI技术, 通过在射电源和探测器之间交替观测的方式, 来扣除VLBI技术中的系统误差. SBI保持连续观测, 利用VLBI技术主要系统误差几乎相同的优势, 相互差分扣除VLBI技术中绝大部分系统误差, 从而计算出形式误差在ps (皮秒)量级、系统误差在ns (纳秒)量级的差分相时延,误差ns量级的差分群时延用于定轨定位. 差分群时延不存在整周模糊度偏移量, 差分相时延形式误差在ps量级, 存在整周模糊度导致的偏移量. 嫦娥3号(CE03)任务中, 利用巡视器“玉兔”和着陆器之间的同波束VLBI差分相时延, 成功计算出“玉兔”相对于着陆器的位置, 精度约1 m[10–11]. 嫦娥4号中继星任务中, 计算的中继星和哈尔滨工业大学龙江2号(微卫星B)在地月转移轨道段之间的同波束VLBI差分相时延, 联合S频段统一测控系统(Unified S-band System, USB)和DOR带宽综合群时延数据, 成功进行定轨,定轨后残差达到4.3 ps水平[12]. 在探月3期交会对接过程中, 有大量观测弧段满足同波束VLBI观测条件, 在远程导引段, 两器有多个弧段同波束VLBI差分时延可以用于定轨工作, 在自主控制段, 差分时延可以用于监视上升组合体的状态.
针对探月3期任务交会对接过程, 本文利用嫦娥3号绕月飞行VLBI带宽综合群时延数据, 分别模拟仿真了上升组合体与轨道器间隔100 km且不变轨时连续飞行半小时中的差分群时延变化情况和上升组合体距离轨道器由5 km追赶为20 m过程中差分群时延的变化情况. 探月3期中, 如果能成功计算出交会对接过程同波束VLBI差分相时延, 变化情况将类似于差分群时延. 差分相时延形式误差取决于相关相位的精度, 而轨道器和上升组合体都发射类似于嫦娥3号发射的DOR信号. 本文通过处理嫦娥3号奔月段VLBI观测数据, 主要是嫦娥3号两组不同DOR信号, 解算出同一探测器不同信标SBI差分相时延, 预判探月3期交会对接过程中差分相时延形式误差情况.
2 时延和差分时延
2.1 时延
时延是VLBI技术应用于深空探测最主要的观测量. 图1给出了VLBI技术接收探测器射电信号进行测量的原理图.−→R1和−→R2是探测器信号分别到达两个台站站心的向量,−→B是两个台站在地球坐标系中的基线向量.c是光速,τg是两个台站跟踪探测器信号的理论时延模型. (1)式给出了理论时延模型. 因为射电信号从探测器发射出来后, 经过太空受太阳风等影响, 穿过地球大气层会存在延迟和电离层的干扰, 到达台站时由于地块运动等因素导致台站站心和基线向量−→B的变化, 所以实际VLBI观测过程中, 时延中包含了大量需要修正的误差项. 中性大气时延、电离层时延、设备时延、钟差、钟速是当前VLBI技术应用于深空探测中需要修正的误差项. 在进行VLBI观测过程中, 利用水汽辐射计、GPS (Global Positioning System)或者常用的大气模型分别计算各台站方向上由于中性大气影响导致的时延量, 一般各台站方向电离层时延则是用电离层球谐函数模型进行计算; 设备时延通常是用相位校准(Phase CALibration, PCAL)信号相位进行计算. 当前我国VLBI技术观测一般都是通过观测射电源, 利用射电源位置精确已知的前提条件, 计算出信号在设备中的时延; 钟速和钟差是利用氢原子钟的变化曲线得到. 修正上述主要误差项后, 就可以得到探测器信号到达不同台站的时间差, 即各条基线可以用于后续定轨定位的时延数据.


图1 VLBI技术观测卫星的时延模型Fig.1 The delay model as using VLBI observing satellite
2.2 差分时延
同波束VLBI观测过程中, 地面各台站同时接收两个探测器发射的信号. 一般两个信号频率有数MHz的差异. 两个探测器在空间位置并不相同, 对于月球轨道X波段信标, 空间距离最大可以达到300 km. 计算出两个探测器的时延后, 两个时延相减, 可以得到同波束VLBI差分时延. 将两个探测器群时延相减就能得到差分群时延. 差分相时延的计算相对复杂一些, 影响差分相时延的主要误差因素几乎不用考虑. 但是电离层时延与频率平方成反比, 如果两个探测器信号频率不同, 那么就会导致差分相时延的电离层时延系统误差, 如下所示:

其中,表示电离层时延影响,k=40.28 m3/s2, ∆TEC表示射电望远镜视线方向总电子含量之差, 可以根据模型或者GPS观测数据进行解算,f1和f2表示两个信号频率.将两个几何时延模型τ1geo和τ2geo相减, 将两个残余相时延相减, 然后此两项相加, 得到含偏移量的差分相时延τdpd:

φ1和φ2是两个信号的相位,m1和m2是两个相位整周模糊度导致的偏差. 因为在一个连续弧段中, (m2−m1)要保证是一个固定值, 所以此偏移量在定轨定位过程中可以计算修正.
3 嫦娥3号VLBI时延数据模拟仿真差分群时延
2013年12月10日, 嫦娥3号探测器处在绕月飞行阶段, 预定轨道约为100×100 km,绕月一圈约2 h. 中国VLBI网连续跟踪嫦娥3号主载波频率为8470 MHz的DOR信号, 从协调世界时(UTC)时刻21点27分到时刻22点13分, 不间断观测嫦娥3号. 这里利用这46 min的数据进行模拟仿真. 这段时间内, VLBI数据处理中心计算得到带宽综合群时延数据, 并可以直接用于嫦娥3号的定轨定位. 此群时延已经修正了探测器信号到达地面所包含的绝大部分系统误差, 真实记录了嫦娥3号在此时刻绕月轨道上VLBI时延观测量.
3.1 两器保持轨道不变化
目前带宽综合群时延时域积分时间约5 s, 时间间隔长. 为了便于在模拟仿真过程中计算以及比较, 选取21点30分(t1时刻)到22点(t2时刻)间30 min连续观测数据, 进行9次多项式拟合, 得到拟合系数(a0,a1,a2,a3,a4,a5,a6,a7,a8). 将时间段t1至t2以1 s间隔生成模拟时间1×1800数组ta, 利用拟合系数可以得到带宽综合模拟群时延, 任务期间,月球交会对接时上升组合体慢慢靠近轨道器, 这里定义此模拟群时延为仿真得到的交会对接过程中轨道器的群时延, 如下所示:

月球半径约1700 km, 嫦娥3号绕月轨道距离月面约100 km, 用半径1800 km计算得到嫦娥3号绕月一周长为11309 km, 嫦娥3号绕月一周约2 h, 所以绕月运行速度大概为1.57 km/s. 如果在估算过程中, 认为上升组合体和轨道器的轨道相同, 只是上升组合体落后轨道器100 km, 就可以在时间ta基础上减去时间dt得到新的时间数组tb, 模拟出上升组合体的群时延:

根据新的时间, 利用多项式拟合系数(a0,a1,a2,a3,a4,a5,a6,a7,a8), 同样也可以计算一个新的模拟群时延:

由于dt很小, 两器轨道间隔100 km, dt=63 s. 地球、月球和太阳等天体相对位置关系变化导致的时延变化在这里忽略不计. 由于传输路径不同导致的大气电离层时延影响不同也忽略不计. 模拟群时延τasdgd就是上升组合体在时间段t1至t2模拟仿真得到的带宽综合群时延.

3.2 上升组合体靠近轨道器
对于上升组合体靠近轨道器的过程, 模拟了t1−t2两器轨道距离从5 km慢慢追赶到200 m的过程. 模拟开始的时候上升组合体距离轨道器5 km, 上升组合体速度为1.57 km/s, 需要耗费∆t1(3.19 s)到达轨道器模拟仿真的开始位置, 所以模拟仿真的时候, 上升组合体的开始时间为t1−∆t1. 模拟结束的时候上升组合体距离轨道器200 m,飞到轨道器模拟结束的位置需要∆t2(0.127 s), 所以上升组合体模拟仿真结束时间为t2−∆t2. 模拟仿真时间内上升组合体距离轨道器由5 km减小到200 m, 整个过程中上升组合体速度比轨道器大了2.67 m/s. 将时间段t1−∆t1至t2−∆t2以均匀间隔生成模拟时间1×1800数组tc, 利用前面9次多项式拟合系数, 可以模拟出此过程中上升组合体模拟群时延:


3.3 上升组合体接近轨道器
上升组合体距离轨道器200 m之后, 上升组合体缓慢接近轨道器, 这里模拟仿真了t2时刻(22点)到t3时刻(22点10分), 总共10 min的接近过程, 前4 min上升组合体加速,两器距离从200 m减小为50 m, 然后上升组合体减速, 2 min内两器距离从50 m扩大为60 m, 最后上升组合体加速4 min内两器距离从60 m减小为20 m.
上升组合体模拟群时延的计算过程和3.2节中一样, 4 min内两器距离从200 m减小到50 m, 上升组合体模拟仿真开始时间为t2−0.127 (200 m两器距离需要0.127 s追赶), 模拟仿真结束时间为t2+240 −0.0318 (50 m两器距离需要0.0318 s追赶). 将时间段t2−0.127至t2+240 −0.0318均匀间隔生成模拟时间1×240数组t1d.
2 min内两器距离从50 m扩大为60 m, 上升组合体模拟仿真开始时间为t2+240 −0.0318, 模拟仿真结束时间为t2+360 −0.0382 (60 m两器距离需要0.0382 s追赶). 将时间段t2+240 −0.0318至t2+360 −0.0382均匀间隔生成模拟时间1×120数组t2d.
4 min内两器距离从60 m减小为20 m, 上升组合体模拟仿真开始时间为t2+360 −0.0382, 模拟仿真结束时间为t3−0.0172 (20 m两器距离需要0.0172 s追赶). 将时间段t2+360 −0.0382至t3−0.0172均匀间隔生成模拟时间1×240数组t3d.

4 模拟仿真结果和分析
4.1 仿真结果概况
图2给出了2013年12月10日CVN (Chinese VLBI Network)观测嫦娥3号DOR信号得到的带宽综合群时延, 时间为21点27分至22点13分, 基线分别为北京(BJ)-昆明(KM)、北京-乌鲁木齐(UR)、北京-天马(TM)、昆明-乌鲁木齐、昆明-天马、乌鲁木齐-天马.6条基线带宽综合群时延都在微秒量级. 将此群时延进行9次多项式拟合, 得到拟合群时延, 与此群时延相减, 计算出拟合时延和观测时延之差, 如图3所示, UR-TM拟合残差均方根(Root Mean Square, RMS)为0.3629 ns, 其他5条基线拟合时延残差类似于图3, 说明利用拟合系数计算的模拟群时延变化趋势和观测值一致, 可以代替带宽综合群时延用于后面的仿真分析.
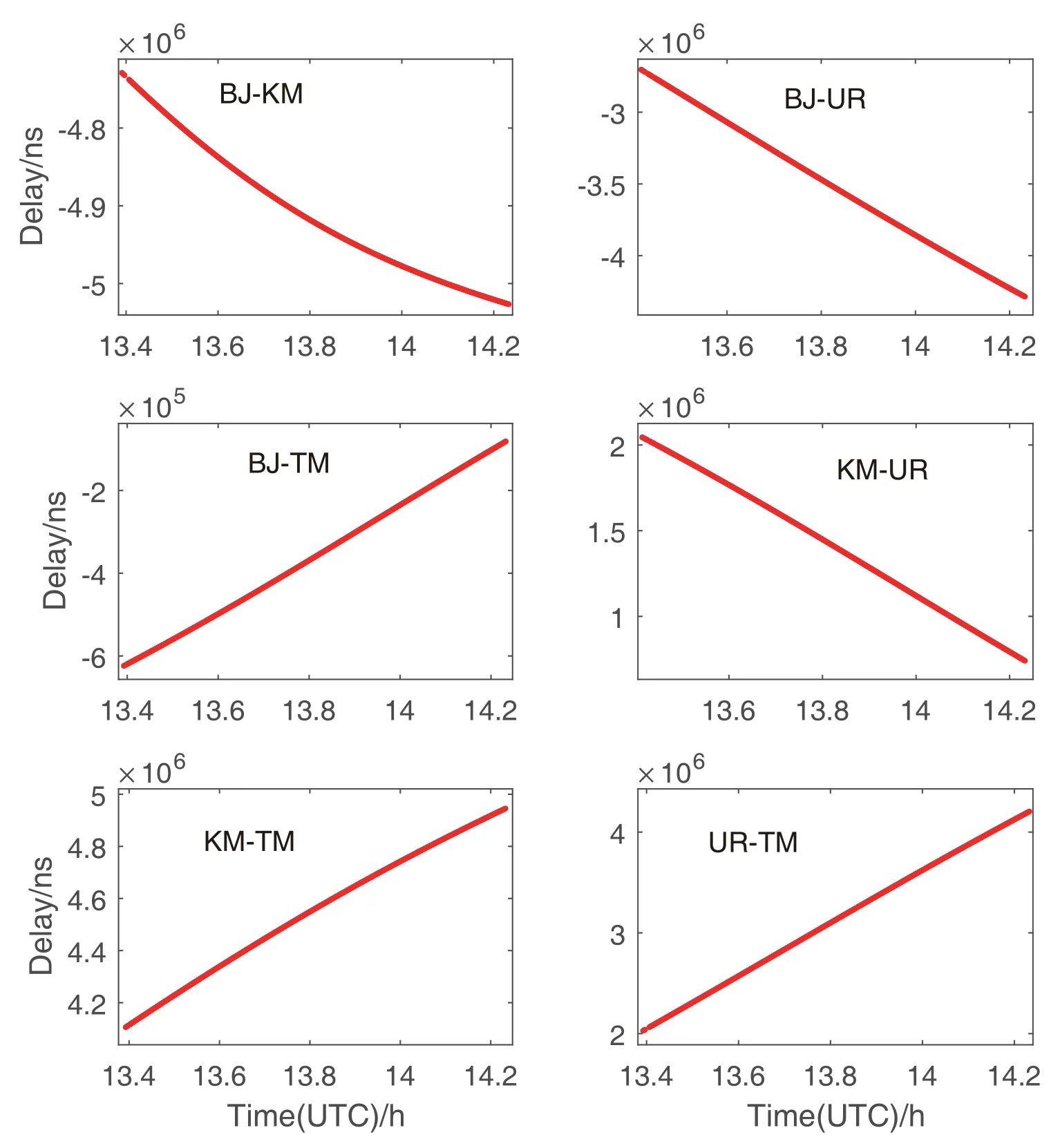
图2 带宽综合群时延Fig.2 Group delay of bandwidth synthesis
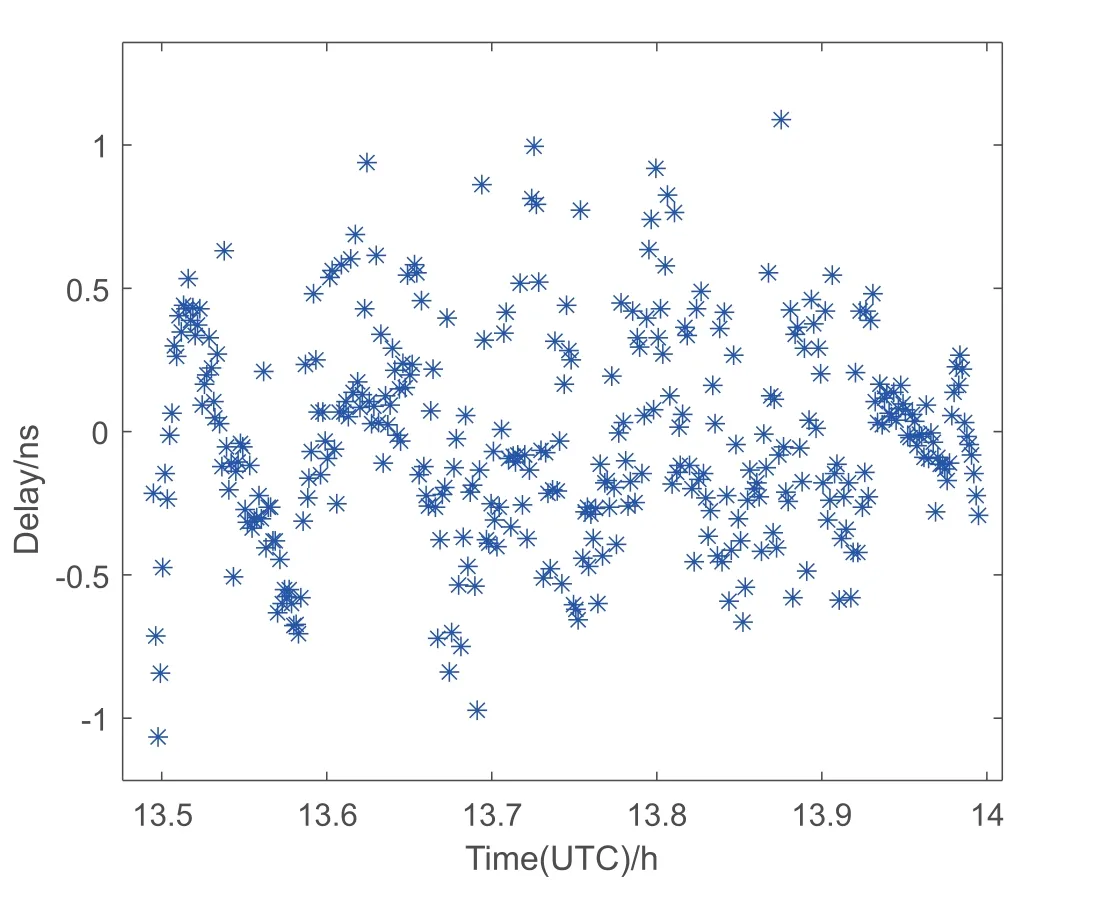
图3 UR-TM基线的拟合值和观测值之差Fig.3 The difference of fitted values and observed values of UR-TM baseline
4.2 上升组合体轨道不变时的模拟差分群时延
整个远程导引段轨道器和上升组合体空间距离由数百km, 慢慢减小到数十km, 整个过程持续1 d以上. CVN的5架射电望远镜最大口径为65 m, 在X波段信标条件下, 同波束VLBI观测的最低要求是两器在视线垂直方向的投影距离小于约300 km. 所以远程导引段, 有数小时的时间可以开展同波束VLBI观测, 并用差分相时延进行轨道器和上升组合体的定轨定位. 这里模拟仿真了轨道器和上升组合体在相同轨道上、轨道间距为100 km情况下, 同波束VLBI差分群时延的变化情况. 轨道器模拟时延利用9次多项式拟合系数根据实际观测时间计算得到; 上升组合体模拟时延则是利用9次多项式拟合系数, 根据(5)–(6)式给出的时间计算得到, 其中dt=63 s. 用上升组合体模拟时延减去轨道器模拟时延得到同波束VLBI差分群时延, 如图4所示. 差分群时延大小在104ns水平, 半小时内有数千ns的变化. 嫦娥3号着陆器和巡视器在月面保持不动时,计算的同波束VLBI差分相时延5 h内变化了约100 ps[13]. 日本月亮女神(SELenological and ENgineering Explorer,SELENE)任务中Rstar和Vstar同波束VLBI差分相时延相比,Rstar和Vstar是绕月椭圆轨道飞行,近月点都是100 km,远月点分别为2400和800 km,卫星飞行情况相对来说比较复杂, VERA (VLBI Exploration of Radio Astrometry)得到的差分相时延如图5所示, 大小在数km水平. 观测时间为2008年1月15日, 石垣岛(Ishigaki,IS)-水泽(Mizusawa, MZ)基线, 长度约2270 km. SELENE任务中, ps量级的差分相时延数据结合测距测速数据能将两器定轨精度提高到10 m水平[13]. 嫦娥3号任务中, 单独利用差分相时延数据成功计算出巡视器相对于轨道器的相对位置, 精度达到1 m水平.黄勇等人利用形式误差10 ps的差分相时延数据, 联合测速测距数据, 对轨道器和上升器定轨, 可以达到1 m的相对定轨精度[14]. 综上所述, 当轨道器和上升组合体轨道间隔约100 km水平时, 地面VLBI系统连续不间断利用同波束观测模式观测, 解算的差分群时延和测距测速数据可以用于两器的轨道确定.
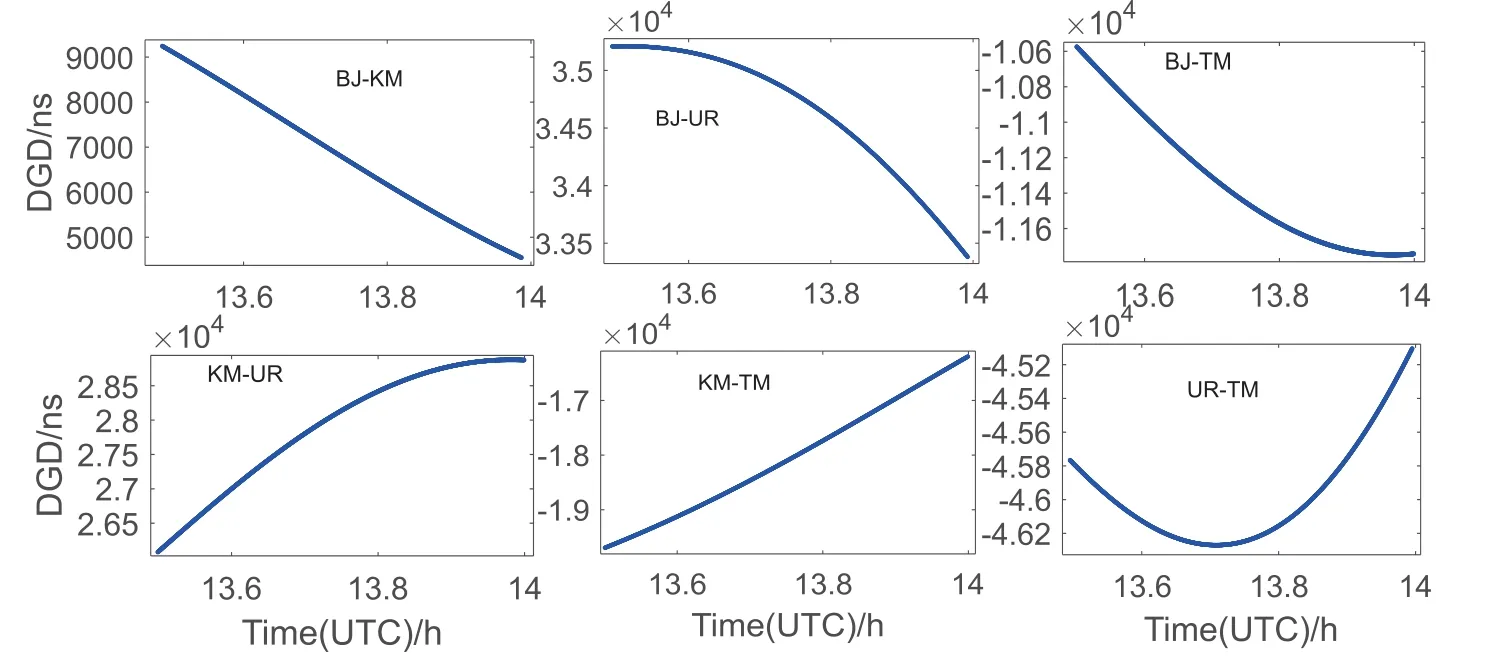
图4 上升组合体轨道不变化时模拟的差分群时延Fig.4 Simulated DGD as the orbit of ascender is keeping
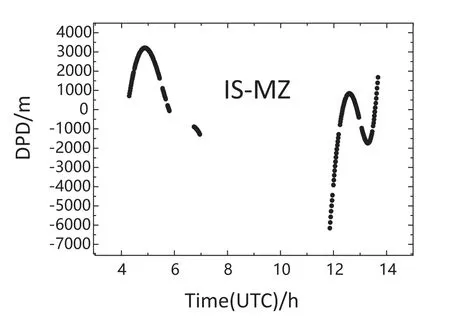
图5 SELENE计算的差分相时延Fig.5 DPD calculated by SELENE mission
4.3 上升组合体靠近和接近轨道器时的模拟差分群时延
地面测控系统根据测速测距和VLBI技术对轨道器和上升组合体进行定轨定位, 到了自主控制段将主要依靠探测器上的自主导航系统完成交会对接过程. 在寻的段、接近段和平移靠拢段, 轨道器和上升组合体间距小于50 km, 满足同波束VLBI观测条件[15–22], 但是此过程持续时间短, 而且上升组合体大部分时间处于机动状态, 差分时延并不能用于定轨定位, 仅能用于监视上升组合体的变化情况. 这里模拟仿真接近段轨道器和上升组合体轨道间距在30 min内从5 km均匀减小到200 m差分群时延的变化情况以及10 min内从200 m减小到20 m差分群时延变化情况.
图6是模拟仿真轨道器和上升组合体轨道间距在30 min内从5 km均匀减小到200 m差分群时延的变化情况. 可以发现上升组合体缓慢靠近轨道器过程中, 两器相对速度为2.67 m/s, 差分群时延趋势是迅速逼近0值附近. 图7是模拟仿真上升组合体缓慢接近轨道器, 在10 min内从200 m到20 m差分群时延的变化情况. 前4 min上升组合体加速,两器距离从200 m减小为50 m, 两器相对速度为0.625 m/s; 中间2 min上升组合体减速,两器距离从50 m扩大为60 m, 两器相对速度为0.083 m/s; 最后4 min上升组合体加速, 两器距离从60 m减小为20 m, 两器相对速度为0.167 m/s. 从图7可知, 上升组合体追赶轨道器过程中, 差分群时延会很明显地趋近于0, 当上升组合体远离轨道器时, 差分群时延绝对值也会很明显变大.
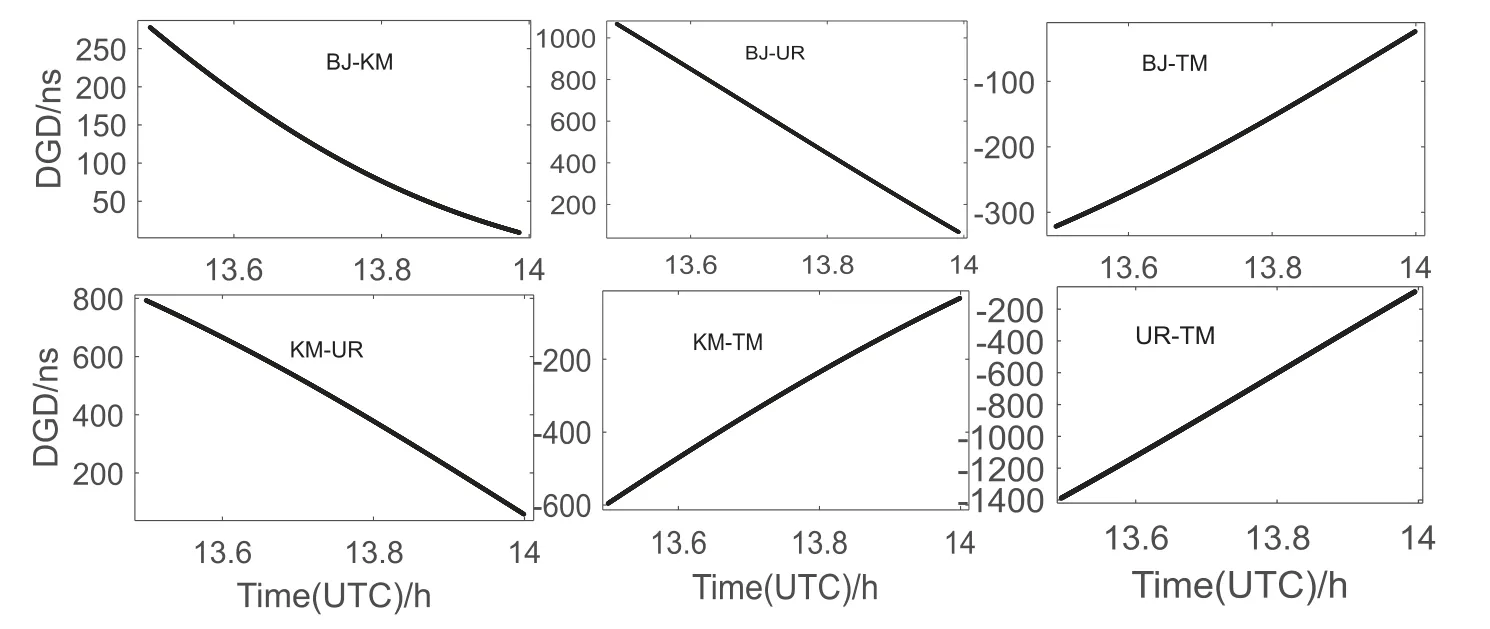
图6 上升组合体靠近轨道器时模拟的差分群时延Fig.6 Simulated DGD as ascender near orbiter
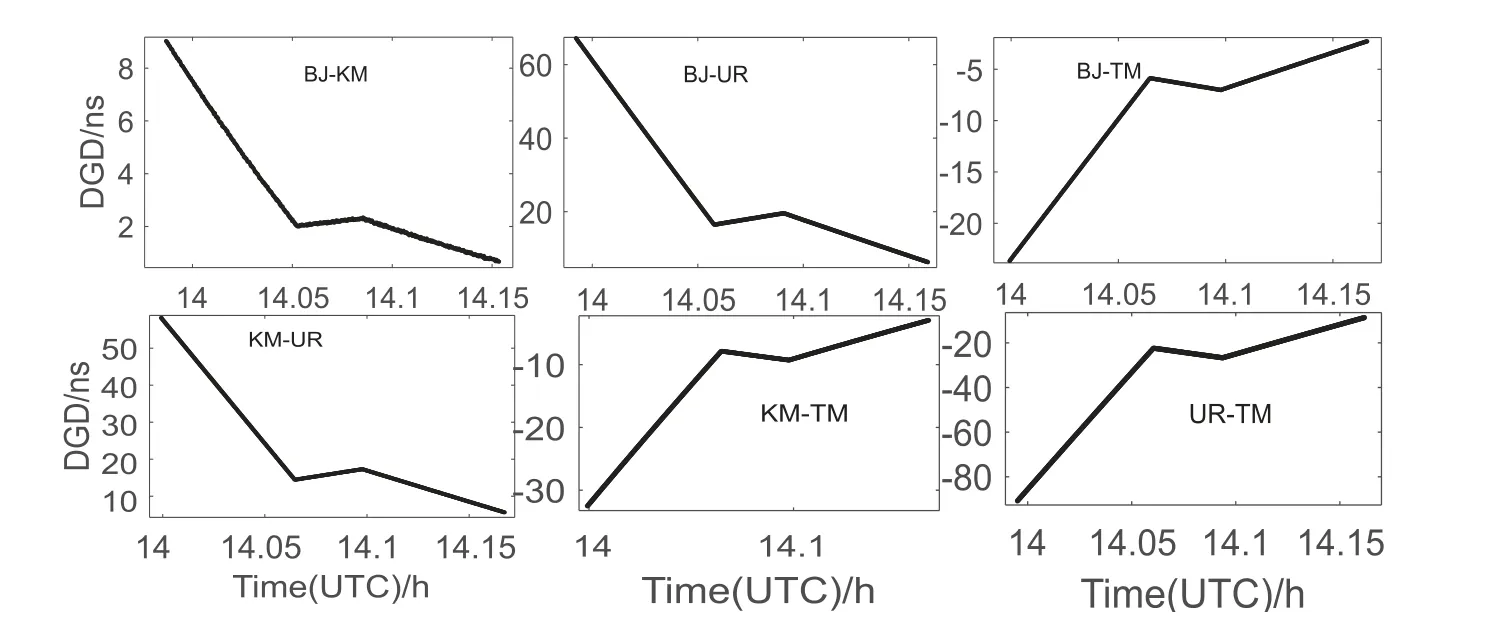
图7 上升组合体接近轨道器时模拟的差分群时延Fig.7 Simulated DGD as ascender close to orbiter
5 讨论
4.2和4.3节用嫦娥3号绕月飞行VLBI观测数据模拟仿真了月球交会对接过程中差分群时延的变化情况. 实际上, 差分相时延相比差分群时延更有优势, 而且可以监视上升组合体靠近过程中的变轨和机动等变化情况. 2013年12月4日嫦娥3号奔月段同时发射了主载波为8470 MHz和8479 MHz两组DOR信号[23–26], 同时被中国VLBI网接收并处理.中国科学院上海天文台VLBI数据处理中心用探月3期软件重新处理了此数据, 并得到了差分相时延结果[27], 如图8所示. 两组DOR信号由嫦娥3号两个不同位置的天线同时发射到地球上, 两个天线距离约2 m, 奔月过程中两天线的运行轨道几乎一样, 所以差分相时延整体上在0左右, 又因为DOR主载波相关相位精度在0.01 rad水平, 差分相时延随机误差在ps量级. 探月3期任务中, 探测器发射的DOR信标信号强度与嫦娥3号DOR信标几乎一样, 实际任务中差分相时延的形式误差也会类似于此图.

图8 用探月3期软件处理嫦娥3号两个DOR信号数据解算得到的差分相时延Fig.8 DPD of two DOR signal transmitted by CE03 and calculated by software that was prepared for our third phase of lunar exploration
嫦娥4号中继星任务中, 利用为探月3期准备的软件处理了地月转移段嫦娥4号中继星和哈工大微卫星B之间的同波束VLBI数据, 成功计算出4 d的差分相时延, 并成功利用2018年5月22日14时30分到15时30分(UTC)的差分相时延、联合测速测距、带宽综合群时延数据进行定轨, 定轨后残差达到4.3 ps水平. 研究过程中, 发现同波束VLBI观测模式需要注意以下几点: (1)在月球交会对接远程导引段, 中国VLBI网能同时观测到两个探测器时, 一个观测弧段连续时间需要大于30 min, 这段时间两个探测器没有变轨机动等导致轨道变化的操作, 当观测弧段结束, 能快速计算出差分相时延, 利用差分相时延变化趋势进行定轨; (2)在月球交会对接自主控制段, 中国VLBI网观测时都能满足同波束观测条件, 实时计算的差分时延主要能监视上升组合体的状态; (3)对于两个探测器,中国VLBI网对准其中一个探测器, 另外一个探测器如果能看到就进入同波束观测模式,并按照同波束模式处理数据, 没有满足同波束观测条件, 就按照正常的DOR处理单探测器数据.
6 总结
本文利用嫦娥3号绕月飞行的VLBI时延数据, 模拟仿真绕月交会对接过程中, 同波束VLBI观测模式下, 差分群时延的变化情况. 仿真结果显示: 在远程导引段, 轨道器和上升组合体轨道距离保持100 km, 持续半小时, DGD很好地反映了两者的轨道信息, 可以用于定轨定位; 自主控制段, 上升组合体靠近轨道器, 轨道距离从5 km减小到20 m过程中, 上升组合体加速追赶轨道器, 差分群时延快速趋近于0, 上升组合体减速远离轨道器, 差分群时延绝对值快速变大, 可以监视两器整个交会对接过程; 利用嫦娥3号奔月段VLBI时延数据, 计算差分相时延, 发现探月3期交会对接过程中, 同波束VLBI差分相时延的随机误差在ps量级.
致谢感谢中国VLBI网工作人员辛苦的观测. 感谢中国科学院上海天文台VLBI数据处理中心各位同仁认真地处理得到此数据.
猜你喜欢
信息通信技术(2022年2期)2022-05-31
军民两用技术与产品(2021年10期)2021-03-16
成都信息工程大学学报(2021年6期)2021-02-12
舰船科学技术(2020年3期)2020-04-22
中学课程辅导·教育科研(2019年3期)2019-09-10
当代水产(2019年1期)2019-05-16
煤矿安全(2019年2期)2019-03-20
太空探索(2016年9期)2016-07-12
舰船科学技术(2015年8期)2015-02-27
创业家(2015年1期)2015-02-27
