
转动惯量分布对电力系统频率稳定性的影响
2020-06-03 07:59温日永秦文萍
太原理工大学学报 2020年3期
温日永,秦文萍,唐 震,曲 莹,郝 捷
(1.太原理工大学 电力系统运行与控制山西省重点实验室,太原 030024;2.国网山西省电力公司 电力科学研究院,太原 030001)
高比例新能源并网运行将成为未来电源结构的重要特征,未来具有传统惯量的同步机组被对系统表现为低惯量的新能源机组取代的比例越来越高,其呈现出的无惯量或弱惯量特征及控制方式将成为系统未来发展的趋势,而这将影响电网系统控制方式和稳定运行[1-2]。
高比例新能源电网频率稳定性的核心是能量的瞬时平衡。惯量,作为抑制系统频率波动的第一道防线,成为监测系统安全稳定运行的重要评价指标[3]。分布式发电单元不具有传统发电机组的转动惯量和阻尼特征,随着新能源机组在系统中所占比例的不断提高,系统中有效转动惯量不断降低,无法为系统在小扰动情况下提供必要的电压和频率支撑,因此电力系统更容易受到功率波动和系统故障的影响[4-5]。
针对高比例新能源系统惯量不足和系统频率稳定性下降的问题,目前的研究主要集中在如何通过新能源的辅助控制提升系统惯量水平。国内外学者提出了虚拟同步发电机(virtual synchronous generator,VSG)控制[6-7]、直接功率控制[8]及功频下垂控制[9-10]等控制方法,通过在新能源机组功率控制环节引入频率控制,增大系统有效惯量,使得新能源机组具备系统频率调节功能。如何高效利用系统现有惯量,只在必须节点增加辅助控制,提升系统惯量水平,对于提高新能源利用率和电力系统运行经济性意义重大。利用复杂网络理论评估节点惯量敏感度主要考虑了系统的网络拓扑模型和电力系统实际运行参数[11-12]。但上述文献未从系统频率稳定角度,评估对转动惯量较为敏感的节点,也未考虑惯量分布对系统频率稳定性的影响。
上述虚拟同步机的频率控制可以局部小范围增强系统有效惯量,但是受限于与电网相接的功率变换器额定功率较小,能够输送的能量有限,以及具体工况较复杂等因素,无法完全响应电网频率变化,不能够及时有效地抑制系统的频率变化[13-14]。因此系统仍旧面临系统惯量不足,系统稳定性较低的问题。在系统确定渗透率及确定拓扑时,如何通过改变系统惯量的分布来提高系统的稳定性就成为一个研究方向。
本文研究了复杂网络中,处于同步状态的耦合动力系统在受到外部扰动的情况下,不同网络拓扑节点频率响应对惯量改变的灵敏程度。首先,在节点传输功率方程基础上,构建了系统小扰动耦合动态模型,进而得到相角偏差与节点功率扰动及系统拓扑之间的关系,并由模态分解进一步得到响应节点频率扰动在非线性扰动下的表达形式。以系统响应节点频率变化率绝对值之和为指标,判断各节点惯量变化对系统稳定性的影响,即节点对惯量的敏感度。最终通过PSASP仿真软件,利用节点频率偏差监测验证拓扑节点对于惯量变化的灵敏度,即系统拓扑惯量节点位置对电力系统频率稳定性的影响。
1 系统小扰动耦合动态模型及扰动评估方法
1.1 系统扰动耦合模型
本文主要研究在系统整体惯量均匀,且系统拓扑结构确定的情况下,某个节点发生小扰动后,其他节点对于该节点扰动的抵抗能力,即电力系统在小扰动下保持同步的能力。因此本文着重分析交流电网中,计及节点惯量及阻尼,节点发生小扰动后相角及频率的暂态稳定特性。
系统对小扰动的响应特性取决于初始运行条件、输电系统强度以及发电机励磁控制等因素[13]。交流电网中的相位动态已通过有功功率平衡方程建模进行描述,该方程同时描述了旋转电机的动力学特性,则节点有功输出及线路间的有功功率传输由方程(1)描述[15]。
(1)
式中:Pi为节点i输出的有功功率;J为节点转动惯量;D为节点阻尼;θi为节点i相角;Kij为传输线功率容量,Kij=V2/(ωLij)Aij,V为节点电压,ω为系统额定角速度,Lij为节点i和j之间传输线电感,Aij为邻接矩阵。

(2)

(3)
(4)
电力系统中机组间的耦合程度可以通过构建无向图来表示[17],其耦合程度由拉普拉斯矩阵L定义[18-19]。

1.2 扰动评估参数
为评估小扰动情况下,各种扰动对同步状态的扰动程度,可以针对系统相角和频率的总体偏差进行评估,由文献[20-21]可得方程(5)和(6).
(5)
(6)

上述这种通过节点相角及频率偏移量与系统总体相角及频率偏移量估计系统受扰动情况的方法,在实际工程中受限于节点扰动时相角和频率的测量方式与测量误差,因此这种评估理论上可行,在实际应用中需要大量数据的收集与处理,且不能反映扰动与相角及频率偏移的本质联系。
1.3 非线性信号的模态分解
由于电力系统中小干扰扰动造成的信号多为非线性信号,且多种扰动间相互影响,不能反映节点扰动对于被分析节点的干扰情况,不利于扰动信号及其响应的分析。而模态分解利用非线性模态研究了非线性动力系统的行为,能够依据系统拓扑与电机初始相角准确地表示系统的扰动节点及响应节点的非线性表达式,并根据其模式分析它们的相互作用,这种表达能够避免测量误差对进一步频率稳定性分析带来的影响,更适合用于理解和分析功率系统的复杂行为[22]。
对节点扰动相角进行模态分解,
δθ(t)=∑αkα(t)uα,δPi(t)=∑αδP0uα k
代入方程(3),可得方程(7):
(7)
式中:λα为模态α对应的特征值;uα i和uα k分别为节点i及扰动节点k处对应的特征向量。
将方程(7)进行拉普拉斯变换,可得方程(8):
(8)
将方程(8)进行拉普拉斯反变换,可得kα的时域表达式,如方程(9)所示。
(9)
由方程(9)可知,节点扰动信号δθ(t)=∑αkα(t)uα与扰动初始有功偏差δP0及扰动节点对应的特征向量uα k成正比,与节点转动惯量J及额定转动频率ω成反比。此处,获得响应节点对扰动的响应在各模态下关于扰动位置及转动惯量等要素的表达式,可以定量地分析各模态下扰动对于各节点的扰动状况。
1.4 频率扰动及对应节点响应
评估扰动对系统同步状态的影响程度,从相角的角度评估之外可以进一步考虑频率的偏离程度。
从模态分解的角度,考虑扰动点k发生有功偏差δP0后,节点i对应的频率偏差δω,如方程(10)所示。将节点频率响应为系统拓扑对应拉普拉斯矩阵的特征向量{uα}和特征值{λα}的频谱和系数。
(10)
(11)
(12)
(13)
在实际电网中,以离散时间间隔t→kΔt监测频率,其中Δt在40 ms和2 s之间[23]。将频率变化率评估为两次测量之间的频率斜率,则点i处频率变化率如方程(14)所示。
(14)
将方程(13)带入方程(14)可得方程(15).
(15)

而第三项为
对比可知,第三项几乎是第二项的两倍,进而得到较高特征值对应的模式只有短暂且近乎可忽略不计的贡献。因此,在估计某节点扰动时对系统整体频率偏移的影响,可以通过几个较大特征值对应的模式来估算,以提高评估扰动对系统频率稳定影响的速度。
这些结果表明,对于系统整体均匀惯性和阻尼,短时间频率变化率与惯量成反比;较长时间的频率变化率取决于较低模态对应的特征值及该特征值下表征扰动节点的特征向量uα k.即小扰动对均匀惯性和均匀阻尼系统总体稳定性的影响主要与系统平均惯量、故障节点所受有功扰动、较低模态对应特征值及该模态下故障节点的对应特征向量有关。
为了评估整个电网中任意节点上的功率变化对系统整体频率稳定性的干扰幅度,需要在不同的时间和地点收集有关频率变化率的信息。因此,本文通过频率变化率绝对值总和引入绩效指标。
(16)
惯量支撑针对系统频率变化,相较于一次调频是一种响应很快的短时冲击型功率支撑,其主要作用是短时内延缓系统频率变化[25]。电网频率变化达到一次调频动作值,到机组负荷开始变化所需的时间,为一次调频负荷响应滞后时间,应小于3 s,作用时间为2.5~15 s.因此我们设置(0,2.5 s)和(0,15 s)两个时间域来考量节点惯量变化对系统稳定性的影响,即系统稳定性对于不同节点惯量的敏感度。
1.5 惯量变化对系统稳定性影响评估方法及流程
惯量变化对系统稳定性影响评估方法及流程如下所示。
1) 确定网络拓扑结构及参数,包括节点的初始相角、节点间的导纳、节点的惯性时间常数和阻尼,然后由方程(4)确定节点的拉普拉斯矩阵,计算该网络的特征值及对应每个节点的特征向量。
2) 将除平衡节点外的所有发电机节点依次替换设置功率扰动,确定监测时间间隔Δt=0.5 s,对两个时间域(0,2.5 s)和(0,15 s),由方程(16)可以获得在不同节点施加扰动时,其他节点相应的频率变化率,以获得该点功率扰动对其他节点频率的影响。
3) 通过方程(16)可以获得监测时间内,针对扰动节点,其他节点频率变化率绝对值的总和,从而评估系统稳定性对于节点惯量变化的敏感度。
4) 将所有发电机节点按照其他节点频率变化率绝对值总和的大小依次排序,在这些节点依次改变相同惯量,对比相同频率下通过小干扰稳定分析中特征值分析法得到特征值实部的数值变化,以验证系统稳定性对于不同网络拓扑节点惯量变化的敏感度这种评估方法的正确性。
2 仿真分析
2.1 均匀惯量系统频率稳定性分析
图1为IEEE 8机36节点系统结构图,节点1至8为同步机,所有机组的额定有功功率和惯性时间常数见表1所示。为防止负荷惯量对系统中节点惯量造成的影响,负荷皆采用恒阻抗模型。

图1 8机36节点系统结构图Fig.1 IEEE36 node schematic
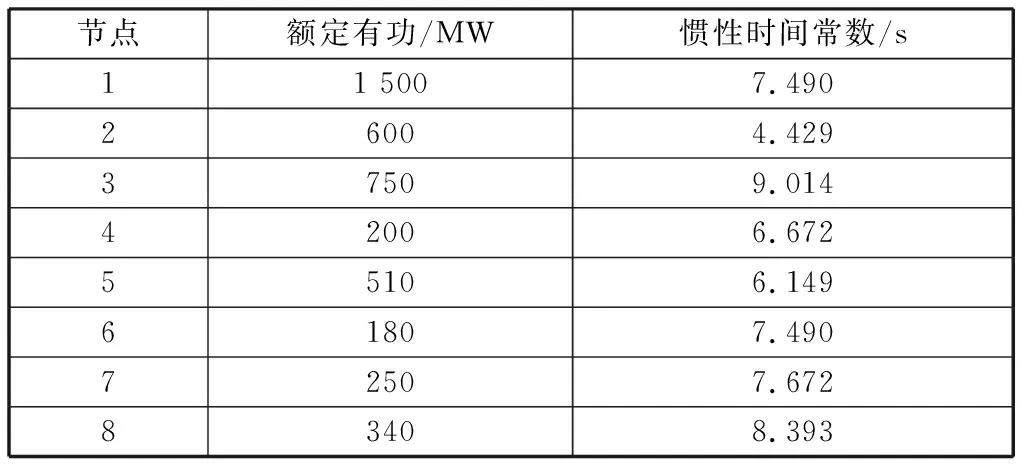
表1 同步机额定有功功率及惯性时间常数Table 1 Synchronous machine rated active power and inertia time constant
将所有节点发电机设置为相同参数的同步机,本文假设所有机组替换为节点8所示的同步机,其额定有功功率为340 MW,依次在不同发电机节点设置相同的功率扰动,每个节点有功功率的变化不超过该节点额定有功功率的10%。本文设置扰动为切机30 MW,持续相同的时间为1 s,监控每个发电机相角及频率,保证扰动消失后每个节点不发生自发振荡或非周期性失步,满足小干扰的条件。针对扰动节点,在两个时间域内,即(0,2.5 s)和(0,15 s),计算节点频率变化率绝对值的总和,从而评估系统稳定性对不同节点惯量变化的敏感度。如表2和表3所示。

表2 15 s内频率变化率绝对值总和及排序Table 2 Frequency change rate absolute value sum and sort in 15 s
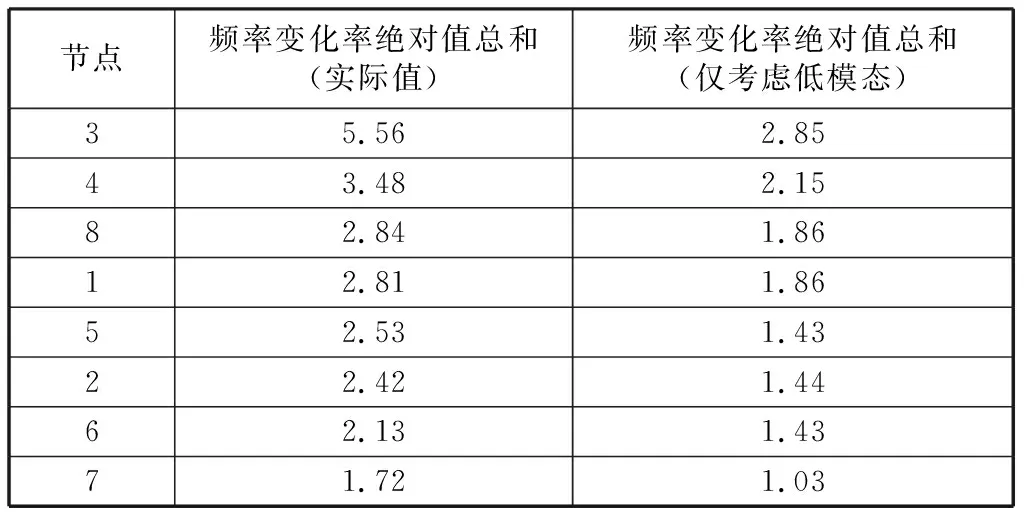
表3 2.5 s内频率变化率绝对值总和及排序Table 3 Frequency change rate absolute value sum and sort in 2.5 s
本文将系统稳定性对节点惯量敏感度评价指标定义为响应节点频率变化率绝对值之和,由表2和表3可知,在两个考量的时间域内,仅考虑低模态所得响应节点频率变化率之和数值基本与实际计算数值趋势一致,说明本方法在系统惯量均匀时是可靠的。而考虑的时间域不同时,响应节点频率变化率绝对值之和数值趋势总体相同,个别节点的响应结果有所区别,这是由于发生扰动时,前2.5 s内仅由惯量抑制频率变化,2.5~15 s内除了惯量抑制频率波动外,还需考虑一次调频对频率波动的抑制作用。
在上述分析中,已经找到并验证节点扰动对均匀惯量系统稳定性的影响因素,并依据此方法进一步得到不同网络节点位置扰动在相同惯量改变下对系统整体稳定性影响的节点排名。下面将进一步研究在非均匀惯量系统中,这种对系统整体稳定性影响的节点排序是否存在,且每个节点惯量变化如何影响系统稳定性。
2.2 非均匀惯量系统频率稳定性分析
2.2.1系统惯量整体均匀改变
图2为对图1中所示8机36节点系统,按实际标准设置系统参数后,将每个发电机节点按10%依次增加系统整体的惯性时间常数时(即均匀改变节点转动惯量),系统特征根实部的变化情况。这样做的优点在于评估整个系统稳定性不受扰动方式和扰动位置的影响,直接获得系统整体转动惯量变化对系统稳定性的影响。由图2可知,当系统整体惯量均匀增大时,针对不同扰动频率,系统特征根实部的变化趋势并非单调递增或递减。本文选择最大振荡频率的数据来判断系统稳定性,当振荡频率为2.90 Hz时,惯量降低时,系统特征根实部增大,系统稳定性减弱;当振荡频率为2.82 Hz时,惯量降低时,系统特征根实部减小,系统稳定性增强;当振荡频率为2.7 Hz时,惯量降低时,系统特征根实部先增加后减小,系统稳定性先减弱后增强。
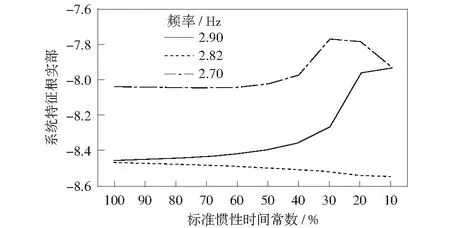
图2 部分特征根实部变化趋势Fig.2 Uniform change of inertia and partial characteristic root
综上所述,对于不同振荡频率,系统整体惯量增加或减少,系统稳定性并不是单调增强或减弱的,仅仅增大惯量并不一定能提高系统的稳定性。因此在接下来的研究中,要计及不同节点网络拓扑位置对于惯量变化的敏感度,区别不同敏感度的节点。
2.2.2单独改变节点惯量
根据2.1节中,惯量均匀电网的仿真分析可知,节点3发生扰动对系统整体频率扰动总和最大,因此本文分析对比节点3发生扰动时,各节点惯量发生变化,响应节点频率变化率绝对值之和,以考量节点惯量变化对系统稳定性的影响。
本文设置扰动为节点3切机60 MW,持续时间为1 s,监测每个发电机相角及频率,保证扰动消失后每个节点不发生自发振荡或非周期性失步,满足小干扰的条件。考量时间尺度为2.5 s和15 s,监测时间间隔Δt=0.5 s.
由PSASP仿真结果可知,当系统为标准惯量时,系统总体频率偏移量针对两时间尺度分别为3.751 54 Hz和24.835 55 Hz.改变各节点惯量时系统总体频率偏移量针对两时间尺度结果如表4和表5所示。

表4 15 s内频率变化率绝对值总和Table 4 Frequency change rate absolute value sum in 15 s

表5 2.5 s内频率变化率绝对值总和Table 5 Frequency change rate absolute value sum in 2.5 s
由表可知:时间域为(0,2.5 s)时,上述差量相对线性;而时间域为(0,15 s)时,上述差量整体呈非线性趋势。这是由于2.5 s内,抑制频率变化主要由转动惯量抑制;而15 s内抑制惯量变化由转动惯量和一次调频共同作用。
通过以上分析可得,2.5 s内惯量改变对系统稳定性的影响节点排序为1,3,5,8,2,4,6,7;15 s内惯量改变对系统稳定性的影响节点排序为1,3,5,8,4,2,7,6.其中节点1是平衡节点,其惯量改变会对系统造成较大影响,因此分析中不予考虑;剩余节点惯量改变对系统稳定性影响大小的趋势在两个时间域内总体与仅考虑低模态下节点对频率变化的敏感度趋势基本相同。排序较高的节点惯量变化对系统稳定性影响较大,因此可以通过均匀系统模态分析初步得到节点对惯量敏感度的排序。综上所述,仿真分析初步验证了不同网络拓扑节点位置对节点惯量改变造成系统频率变化的敏感度不同,并验证了均匀系统模态分析得到的节点对惯量敏感度的排序的正确性。
3 结论
本文针对复杂网络中,处于同步状态的耦合动力系统在受到外部扰动的情况下,通过模态分解,分析了节点惯量改变对系统频率稳定性的影响。从频率扰动的角度,分析了在各模态下响应节点频率扰动的表达形式,以系统所有节点频率变化率绝对值之和为指标,结合IEEE 8机36节点系统研究了各节点惯量变化对系统稳定性的影响,即系统频率稳定性对不同位置节点惯量变化的敏感度,具体结论如下。
1) 在均匀惯量系统中,节点频率变化率的影响主要与扰动节点位置有关,与扰动节点有功变化成正比,与系统整体惯量及额定转动频率成反比。
2) 系统整体惯量的均匀增加或减少并不能提高系统稳定性,在不同振荡频段稳定性变化趋势有所不同。
3) 以系统中响应节点频率变化率绝对值总和为指标,通过改变节点惯量,得到了非均匀惯量系统不同节点对于转动惯量的敏感度排序,较为敏感的节点惯量减小将导致系统频率变化率响应的增加较多,即对系统频率稳定性影响较大,对系统转动惯量变化更为敏感。
4) 节点对于转动惯量的敏感程度可以通过模态分解的方法,在考虑系统拓扑及扰动节点位置等因素的条件下,大致估计节点位置对于惯量变化的敏感度,而不需要通过对所有节点进行频率监测来评估。
在系统有效转动惯量不断减小的背景下,通过研究系统频率稳定性对节点转动惯量改变的敏感度。在新机组规划时,将对系统表现较高惯量的机组或惯量占比较高的发电机组合配置在对转动惯量敏感的节点;而将新能源机组或惯量占比较低的发电机组合配置在对转动惯量不敏感的节点,通过这种方式提高系统的频率稳定性。
猜你喜欢
电力系统保护与控制(2022年19期)2022-10-21
山西大同大学学报(自然科学版)(2022年4期)2022-08-29
农业灾害研究(2022年6期)2022-08-29
现代电力(2022年2期)2022-05-23
防爆电机(2021年3期)2021-07-21
汽车实用技术(2021年6期)2021-04-07
初中生世界·九年级(2020年9期)2020-09-21
智富时代(2019年5期)2019-07-05
智富时代(2019年5期)2019-07-05
汽车工程(2019年4期)2019-05-07
