
清漂无人船船体轻量化研究
2020-05-30 03:32张楚鹏张道德
湖北工业大学学报 2020年2期
张楚鹏, 陈 铭, 张道德
(湖北工业大学机械工程学院, 湖北 武汉 430068)
无人船能更有效地利用船体空间,增加垃圾打捞量,通过自主巡航打捞垃圾,节省能源,更加绿色环保[1]。对无人船而言,其续航能力是关键,在电池容量一定的情况下,如要提高无人船续航,需尽量降低全船质量,而船体质量占比最大,因此对无人船船体展开轻量化研究可提升续航和降低成本。
船舶结构的优化设计方法主要可分为基于规范的经典优化方法、直接计算法以及基于代理模型的优化方法三种[2]。曾广武[3]等人利用经典优化法对舰船纵向尺寸进行了优化;Li Sun[4]等人运用直接计算法对某集装箱船中部结构进行优化;史亚朋[5]等人利用基于代理模型的优化方法对某大型油船中部结构进行优化。其中,基于代理模型的优化方法用近似数学模型来代替耗时的有限元分析,成为船舶结构优化新的趋势[6-8]。
单隐含层BP神经网络处理简单问题,且需要连续函数来逼近,而清漂无人船结构参数较多,受力复杂,用单隐含层神经网络拟合效果并不理想。鉴于此,本文研究改进单层BP神经网络隐含层神经元节点数,增加隐含层数,提高神经网络的计算精度,并比较不同隐含层神经网络的性能,确定基于双隐含层BP神经网络的结构优化模型,并运用到清漂无人船轻量化中,对优化后的结果进行有限元验证分析。
1 船体优化方案
在进行基于代理模型的结构优化设计时,结构优化数学模型三要素必须确定,即:设计变量、约束条件以及目标函数[9]。
1.1 船体设计变量的选择
以自主研制的清漂无人船为研究对象。该船长5 m,宽2.4 m,为单甲板、单底板、单舷侧的双船体结构。全船为钢制船,采用横骨架式结构,有清漂装置的固定筋,两船身的连接桥,单船设有1根中内龙骨,10根横向肋板。清漂无人船的体积相对较小,参数变量较少,故忽略局部细节,将所有构件作为设计变量进行分析。采取参数试验法对船整体构件进行灵敏度分析[10],依此来确定优化过程中涉及的设计变量。清漂无人船如图1所示。

图 1 清漂无人船体
1.2 约束条件
根据中国船级社《钢制内河船舶入级与建造规范(2016)》[11],确定其中主要构件厚度尺寸约束条件为:肋板不小于35.4 mm;甲板横梁不小于35.7 mm;甲板纵桁不小于47.1 mm;船底板舱壁不小于2.4 mm。船舶所受到的等效应力、剪应力最大值约束限制如下:
(1)
σmax和τmax通过BP神经网络拟合的应力与板厚函数确定,[σ]=220 MPa,[τ]=115 MPa。
1.3 船体优化目标函数
基于物理学质量公式,以清漂无人船船体质量最轻为优化目标建立目标函数,其数学表达式为:
(2)
式中:M为船上固定设备重量;n为构件数量;Vk为第k个构件的体积;ρk为第k个构件的密度;Sk为第k个构件的面积;Tk为第k个构件的厚度。
2 基于参数试验法的船体灵敏度分析
2.1 原厚度尺寸船体有限元分析
清漂无人船船上搭载有清漂装置、垃圾收纳盒、垂直风机、蓄电池、电气控制柜、抽水泵,总质量为997.6 kg,满载时船吃水线深为500 mm。部件分布如图2所示,各部件质量如表1所示。

1-太阳能板;2-垂直风机;3-清漂装置;4-抽水泵; 5-蓄电池;6-电控柜;7-垃圾收纳盒图 2 船体固定部件分布
表1 各部件质量

设备名称m/kg数量/个(台)蓄电池142.52电机502垃圾收纳盒501电气控制柜601抽水泵42.61清漂装置801太阳能板27.29垂直风机28.754
按照最危险工况(即满载情况)对船体、固定筋以及船身连接桥进行有限元分析,并计算由水面以及船身所引起的固有频率,船体采用普通低碳钢建造,其密度为7.85×103 kg/m3;杨氏模量为2.1×105 MPa;重力加速度为9.8 m/s2;泊松比为0.3;屈服强度为235 N/mm2。
通过分析得出全船最大等效应力为116.13 MPa,最大剪应力为60.737 MPa,小于规范要求,有优化的空间。应力分析结果以及1阶、2阶固有频率如图3、4所示。
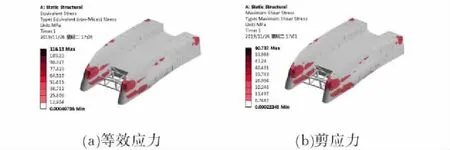
图 3 应力云图
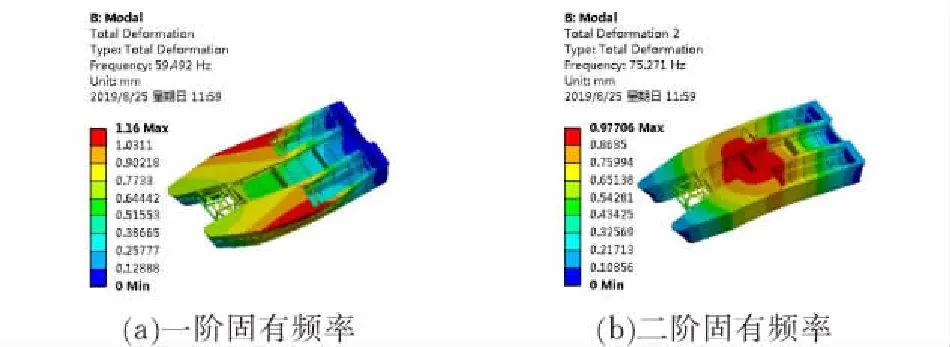
图 4 船体固有频率
2.2 船体构件灵敏度分析
用SolidWorks建立改变清漂无人船各构件厚度参数的模型,运用ANSYS有限元分析软件来计算改变构件参数后,船体的等效应力最大值、剪应力最大值、质量以及1阶、2阶固有频率的响应变化。对试验数据进行整理,部分结果如图5所示。
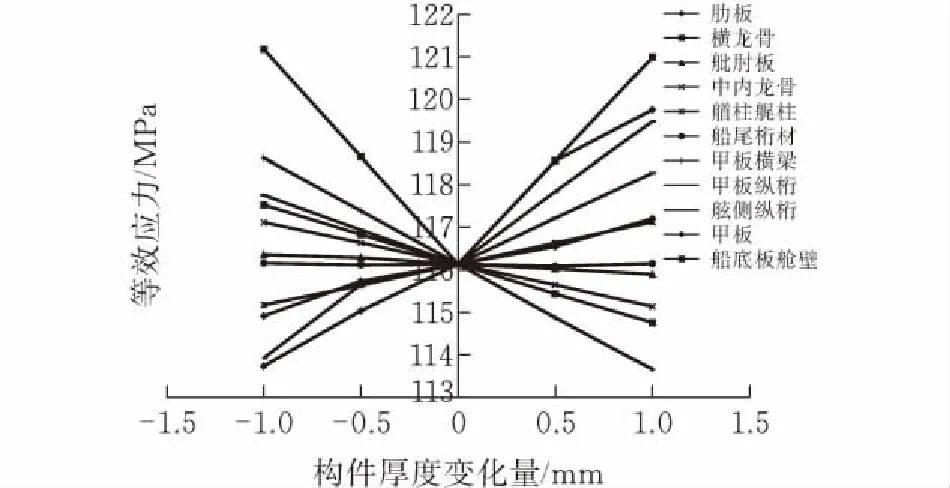
(a)等效应力
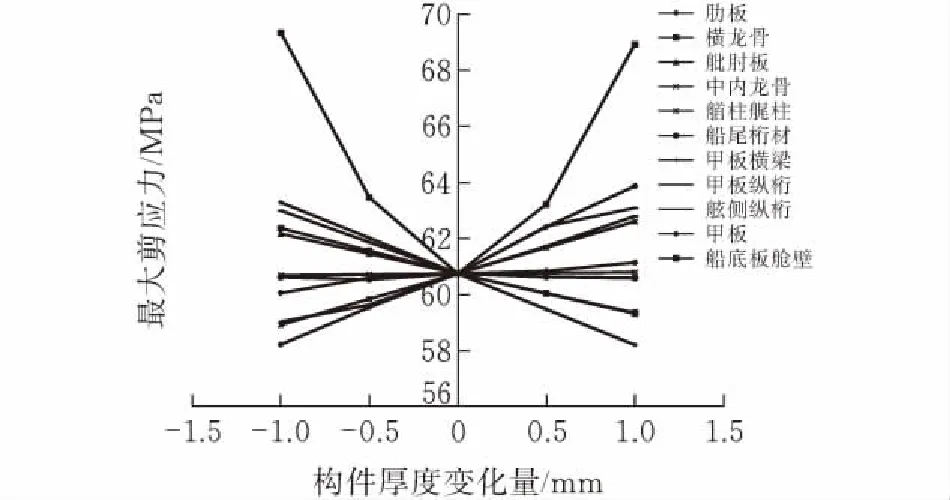
(b)剪应力
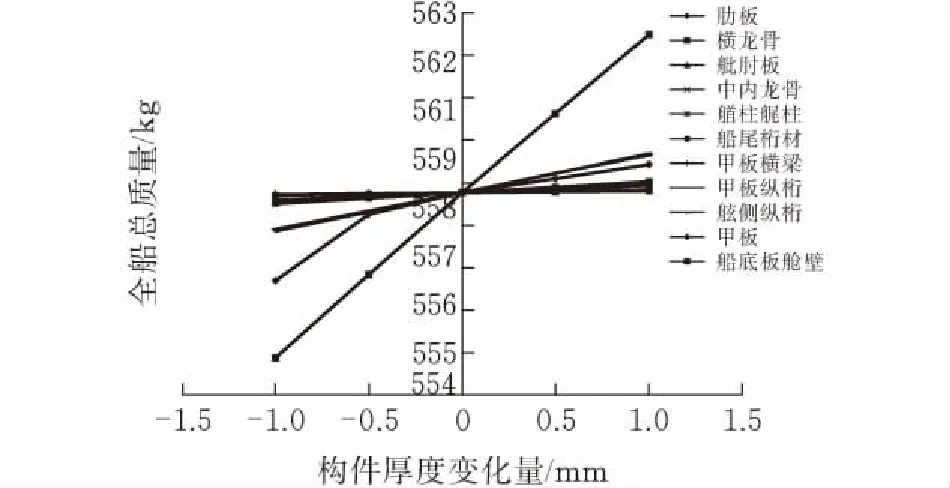
(c)全船质量

(d)一阶固有频率图 5 灵敏度分析结果
对图5结果进行分析,将改变构件几何参数后对应力、质量以及固有频率影响小的构件因素筛选剔除,发现:肋板、甲板横梁、甲板纵桁以及船底板舱壁等构件对等效应力、剪应力影响较大;船底板舱壁、肋板对质量影响较大;船底板舱壁、龙骨对固有频率影响较大。综合考虑,将肋板、甲板横梁、甲板纵桁以及船底板舱壁等构件作为有效的设计变量。
3 船体双隐含层BP神经网络的建立
利用MATLAB构建反映设计变量与最大等效应力、最大剪应力映射关系的BP神经网络,并对其进行训练和测试。发现单隐含层BP神经网络的拟合情况并不理想,决定系数略小,相对误差较大。针对此问题,提出构建基于双隐含层的BP神经网络,增加隐含层神经元节点,提高神经网络传递时的计算精确率,以此来减小相对误差,达到更好的拟合效果,并与三、四隐含层BP神经网络进行性能比较。双隐含层BP神经网络结构如图6所示。

图 6 双隐含层BP神经网络
图6中,x为输入设计变量,y为应力输出,P1至Pn为输入层神经元节点,1至S1为第一隐含层神经元节点,1至S2为第二隐含层神经元节点,T为输出层神经元节点。
3.1 BP神经网络结构设计
将灵敏度分析得出的肋板、甲板横梁、甲板纵桁以及船底板舱壁等构件的厚度变量作为神经网络的输入,构造4因素5水平的正交表,进行正交试验[12],得到100组作为神经网络训练和测试样本的数据,其中80组数据用于训练样本,20组数据作为测试样本,将最大剪应力和等效应力值作为神经网络的输出,构造2个BP神经网络。
神经网络输入层节点数由输入变量数决定,取4个节点;输出层节点数由应力输出决定,取1;隐含层节点数由经验公式确定,其表达式如下:
第一隐含层
l=2m+1
(3)
多隐含层
(4)
式中:l为隐含层节点数;m为输入节点数;n为输出节点数;a为1~10间的调节常数。
据此构建单隐含层、双隐含层以及三、四隐含层BP神经网络结构。
3.2 BP神经网络训练与检测
对构造的BP神经网络在最小均方误差、学习率、最大迭代次数一致的情况下进行训练,具体参数设置如表2所示。

表2 BP神经网络训练
训练完成后,比较这几类BP神经网络应力输出的真实值与预测值的拟合情况,以及决定系数R2,其范围在[0,1],其越接近1,表示模型的性能越好,反之代表模型性能越差。其拟合效果见图7。

图 7 四类BP神经网络输出结果拟合
由图7可见,双隐含层BP神经网络决定系数R2=0.93768,相比于单隐含层BP神经网络决定系数(0.39175)、三隐含层BP神经网络决定系数(0.5414)、四隐含层BP神经网络决定系数(0.78374),其拟合效果更好,更趋近于1。
计算比较这几类BP神经网络训练误差,其训练误差如图8所示,其误差表达式:
(5)
式中:p为第p个样本;n为样本数;di(p)为第p个样本的预测值;yi(p)为第p个样本的真实值。

图 8 四类BP神经网络训练误差
由图8可算出单隐含层BP神经网络训练误差为0.068,双隐含层BP神经网络训练误差为0.0135,三隐含层BP神经网络训练误差为0.0509,四隐含层BP神经网络训练误差为0.1565,比较得出双隐含层误差更小,精度更高。故本文构建的双隐含层BP神经网络能有效、精确反映设计变量与输出应力之间的关系,可作为代理模型代替有限元模型,参与到清漂船结构优化中。
4 全船结构优化与分析
利用结构优化数学模型,全船结构优化表达式:
(6)
式中:x=(x1,x2,…,xn)为需优化的设计变量;f(x)为目标函数;lk(x)=0,(k=1,2,…,K)为设计变量需满足的等式约束条件,船体尺寸约束;gj(x)≤0,(j=1,2,…,J)为设计变量满足的不等式约束,BP神经网络拟合的应力与板厚函数。
将肋板、甲板横梁、甲板纵桁以及船底板舱壁等构件作为优化的设计变量,利用相关规定中的尺寸约束以及BP神经网络中预测的构件厚度与等效应力、最大剪应力非线性函数作为约束条件,将清漂无人船质量最轻函数作为目标函数,进行全船结构优化。优化以后,全船质量从568.775 kg减少至510.191 kg,质量减少10.3%左右。构件尺寸结果如表3所示。

表3 优化前后构件尺寸结果对比 mm
依照表中数据,对清漂船参数进行修改,对优化后的清漂船进行有限元分析,部分结果如图9所示。

图 9 应力云图
由图9可知,优化后的清漂无人船最大等效应力为155.45 MPa,小于[σ]=220 MPa;最大剪应力为85.231 MPa,小于[τ]=115 MPa,故满足规范设计要求。
将优化后的清漂无人船装载至武汉市蔡甸区高湖进行试验,其满足吃水航行以及强度要求。试验实物如图10所示。
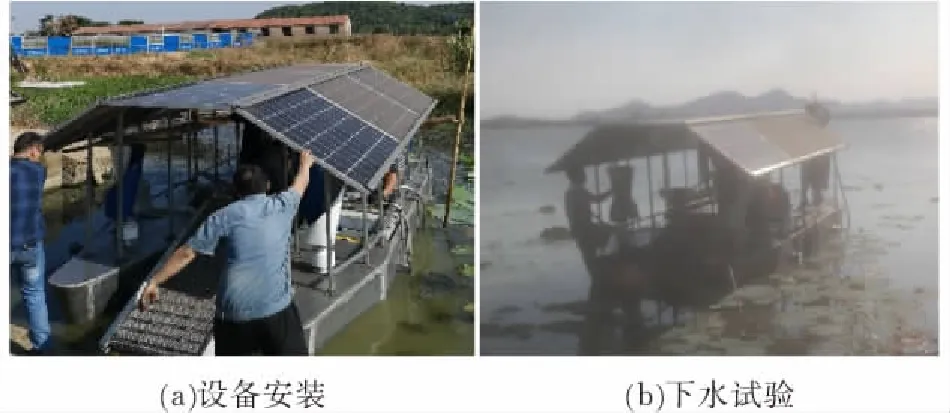
图10 优化后船体下水试验
5 结论
通过建立清漂无人船全船优化模型,以全船质量最轻为目标优化函数,构造双隐含层BP神经网络作为有限元分析替代模型,根据船舶设计规范来约束应力与厚度尺寸,对清漂无人船进行结构优化,优化后全船质量降低10.3%。对优化后的结果采用有限元分析,优化后的清漂无人船满足规范要求,下水试验成功,证明了双隐含层BP神经网络在清漂无人船结构优化上的可行性。
猜你喜欢
舰船科学技术(2022年20期)2022-11-28
舰船科学技术(2022年11期)2022-07-15
铝加工(2021年6期)2021-12-04
山西建筑(2020年20期)2020-10-12
兰州交通大学学报(2020年1期)2020-03-19
船舶标准化工程师(2019年4期)2019-07-24
学生导报·中职周刊(2019年7期)2019-06-11
实验流体力学(2017年3期)2017-07-07
实验流体力学(2017年3期)2017-07-07
