
永磁同步直线电机DDPG自适应控制
2020-05-29 11:15:56张振宇张东波
微电机 2020年4期
张振宇,张 昱,陈 丽 ,张东波
(1.沈阳工业大学 信息科学与工程学院,沈阳 110870;2.广东省智能制造研究所 广东省现代控制技术重点实验室,广州 510070)
0 引 言
永磁同步直线电机(Permanent Magnet Synchronous Linear Motor,PMSLM)有着推力大、速度大、行程大和精度高等优点,因此广泛应用于现代工业中[1]。直线电机伺服系统相比传统的伺服电机精简了机械结构,取消了传动环节,具有优越的加减速度特性和高刚度、高可靠性,运行噪声小,维护简单等优点。目前,直线电机技术已经比较成熟,并越来越多地用在高速、高精密机械加工中[2]。由于实际直线电机伺服系统的非线性及不确定性,当模型的不确定性超过传统线性最优鲁棒控制所允许的范围时,控制系统就变得不稳定[3],所以传统PID控制在直线电机高加速运行有干扰情况下不能达到理想的控制效果。
针对以上现状,为了在高速高精度应用场合实现对非线性、强耦合、负载扰动大的永磁同步直线电机的快速精准控制,本文提出深度确定性策略梯度(Deep Deterministic Policy Gradient , DDPG)算法自适应控制策略,其被控对象可以是非线性系统,DDPG自适应控制系统基于强化学习,具有很强的自学习、自整定能力,能根据负载扰动进行更新控制策略,有效提高系统抗干扰能力,减小速度信号跟踪误差。并通过在Matlab/Simulink仿真平台仿真分析和传统PID控制性能进行对比实验,验证DDPG自适应控制器的动态性能。
1 永磁同步直线电机模型建立
为了分析直线电机的特性,并在Simulink上进行仿真,首先要对直线电机进行数学建模。直线电机的数学模型是个强耦合、多变量、非线性系统,直接分析它的微分方程难度很大,通常釆用的方法是坐标变化方法[4]。将三相正弦交流电通入交流电机定子的三相绕组A、B、C中,会产生旋转磁势,它在空间是呈正弦分布的。为了分析和设计的方便,直线电机数学模型通常需要用到Clark变换、Park变换和Park逆变换。
将三相静止坐标等效为两相静止坐标(3S/2S),ABC→αβ0,称为Clark变换。
(1)
考虑零轴分量,两相αβ坐标系到两相dq坐标系的变换矩阵形式为:
(2)
通过矢量旋转变换,将两相静止的αβ坐标系变换到两相旋转的dq坐标系,称为Park变换。经过变换后,PMSLM的d、q轴数学模型模块如下:
电流平衡模块:
根据矢量控制的基本原理,可以推出直线电机在d、q轴数学模型下的电压方程式为
(3)
式中,Rs为初级绕组等效电阻,ud为直线电机d轴电压,id为d轴电流,ψd为d轴磁链;uq为q轴电压,iq为q轴电流,ψq为q轴的磁链;为永磁体极距,v为直线电机的同步运动速度。
磁链方程为
(4)
式中,Ld为d轴电感,Lq为q轴电感,ψf为永磁体励磁的基波磁链。
电磁推力方程为
Fe=K[ψfiq+(Ld-Lq)idiq]
(5)

(6)
式中,Fe为电磁推力系数。
机械运动方程:
(7)
式中,M为直线电机初级的质量,F1为负载干扰阻力,B为黏性阻力系数。
因为直线电机的次级为永磁体,由式(6)知,当初始状态保持iq与d轴垂直,不仅可以对直线电机数学模型进行参数解耦,而且还可以得到最大推力。所以采用id=0的矢量控制策略,则永磁同步直线电机的数学模型可简化为
(8)
所以直线电机传递函数结构图如图1所示。
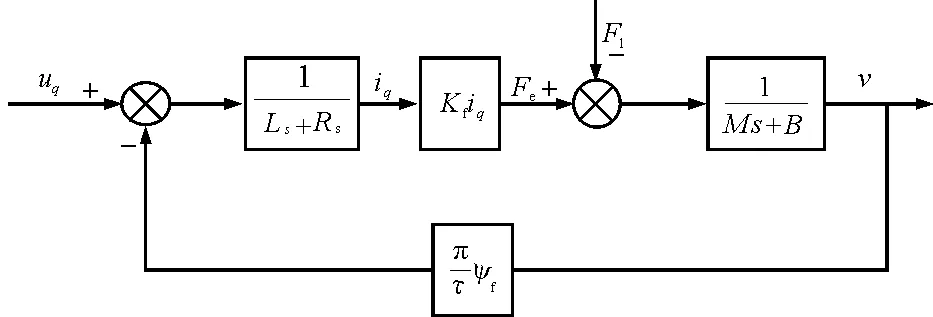
图1 直线电机传递函数结构图
根据上述直线电机数学建模在Simulink上搭建好直线电机模型,由于直线电机采用脉宽调制的三相电流供电,并采取电流跟踪控制的,所以需要在直线电机模型前再连接SVPWM模块,而DDPG自适应控制器是根据控制电流跟踪,来实现直线电机模型控制的。
2 DDPG自适应控制策略
DDPG是深度强化学习的一种算法,是一种数据驱动的控制方法,可以根据系统的输入输出数据,学习系统的数学模型,并根据给定的奖励实现系统的最优控制。2013年,Deep mind公司提出了深度Q网络(Deep Q-Network, DQN)。通过将DQN应用到视频游戏,强化代理仅通过从图像中获取信息多次训练,就可以就能熟练的闯关游戏[5]。Lillicrap 等人于2015年提出了一种深度确定性策略梯度(DDPG)算法作为重放缓冲器来构建目标网络,以解决连续运动空间神经网络收敛和慢速算法更新的问题[6],并在Nature上发表的关于深度强化学习的论文[7]。
DDPG算法是一种无模型、在线、离线策略的强化学习方法,仅利用受控系统的输入输出数据直接进行控制器的设计和分析,使用批量次的数据对仿真代理进行训练,最终培训出合适的强化代理,在强化代理根据环境改变而更新策略,来更新评判Q值。DDPG采取经验回放机制,通过连续对目标网络参数与当前网络的参数加权平均进行训练,以避免振荡[8]。
深度强化学习具有良好的知识转移能力,这对于伺服系统跟踪具有不同幅度或频率的信号是必要的。DDPG是一种数据驱动的控制方法,可以根据系统的输入输出数据学习系统的数学模型,并根据给定的奖励实现系统的最优控制。通过DDPG的自学习智能结构,提高直流电机伺服系统精度[9]。
DDPG自适应控制器基本框架如图2所示。

图2 DDPG自适应控制器基本框架图
图中虚线上部分是基于强化学习的自适应参数调节器,由强化学习代理组成,虚线下部分由被控对象组成作为代理环境交互对象。其中误差e(t)=u(t)-y(t),u(t)是初始输入值,y(t)是反馈值。
考虑到系统误差和反馈值数值范围对系统控制性能的影响, 奖励函数定义为
rt=α1r1(t)+α2r2(t)
(9)
其中,α1,α2分别为限定误差值范围和反馈数值范围的奖励系数,r1(t),r2(t)分别为误差值范围和反馈数值范围,定义为
(10)
(11)
其中,σ为允许的误差带,y′(t)为反馈数值上限。
在Simulink上搭建的基于DDPG自适应控制器的直线电机速度环控制框图如图3所示。

图3 DDPG自适应直线电机速度环Simulink控制框图
V0为初始给定速度模块;C_npmlsm为直线电机电流环集成模块;Signal Processing为直线电机对强化代理的信号处理模块,以直线电机的速度误差e和反馈速度Velocity信号作为输入,再将速度误差e、误差积分及反馈速度Velocity作为观察状态st输入到强化代理的观察状态Observation端口,反馈速度Velocity的速度范围作为强化代理的截至范围输入到强化代理的Isdone端口,根据对误差e的限定范围及反馈速度截至范围设定的奖励输入到强化代理的Reward端口;RL Agent为DDPG强化代理模块,将动作值作为直线电机电流环的输入电流值输入到C_npmlsm模块中。
DDPG自适应控制器在Simulink上搭建大部分需要采用M文件下编写S函数来调用神经网络模块组建强化学习代理。
3 实验结果与分析
基于DDPG自适应控制器的直线电机速度环控制系统在Simulink上搭建好以后,将主要相关参数输入。本论文仿真参数设置为Rs=3.3 Ω,Ld=Lq=0.001 H,M=1 kg,B=1.2 N·s/m,ψf=0.23336Wb,=0.048 m,连续推力F1=130 N。给定速度设置为2 m/s,奖励函数设置为rt=5×(e<0.01)-1×(e>0.01)-100((y′(t)>4)‖(y′(t)<0))。在强化代理经过多回合自学习,自整定后,当训练的指标达到设定的指标时,仿真模型停止训练,并生成最优强化代理,保存到指定的文件夹下。
仿真速度初始给定2 m/s,在无干扰条件下,传统PID控制和DDPG自适应控制的速度对比仿真结果如图4所示,从图中的对比波形图可看出,DDPG自适应控制不仅超调量小,而且具有更快的响应速度。
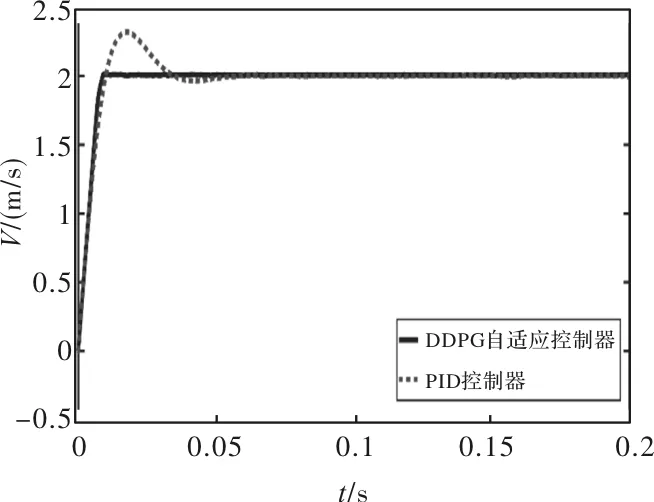
图4 无干扰速度对比仿真波形图
为了检验系统的抗干扰能力,仿真速度初始给定2 m/s,在t=0.1 s时,施加50 N的负载扰动,传统PID控制和DDPG自适应控制的速度对比仿真结果如图5所示,从仿真图中速度波形可看出,DDPG自适应控制相比PID控制,不仅减小了超调量,提高了系统的响应速度,而且在被控系统突加扰动的情况下,扰动小,能使系统快速恢复稳定,具有较强的抗干扰能力。

图5 施加干扰速度对比仿真波形图
为了检验系统的跟随性能,仿真速度输入为方波信号,初始速度为1 m/s,在t=0.08 s时,变为4 m/s,在t=0.16 s时,变为2 m/s,在t=0.24 s时,变为1 m/s,在t=0.32 s时,变为3 m/s。传统PID控制和DDPG自适应控制的速度对比仿真结果如图6所示,从仿真图中速度波形可看出,DDPG自适应控制相比PID控制,具有更优良的跟随性能。
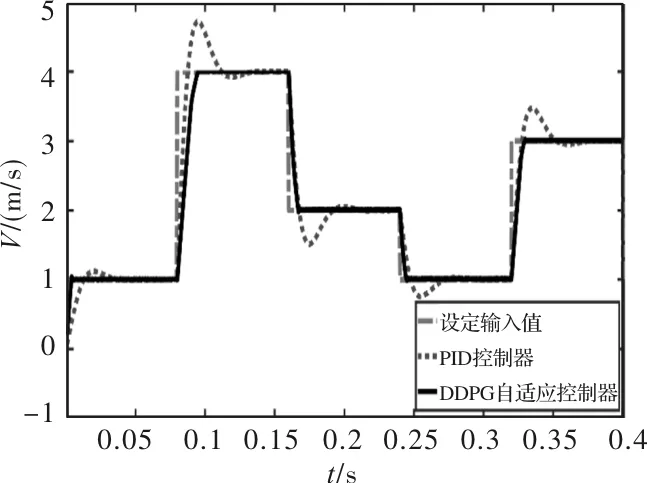
图6 跟随速度对比仿真波形图
4 结 语
本文针对直线电机的模型的非线性、强耦合、负载扰动大等特点,提出了一种基于DDPG自适应控制新型控制方法,应用于PMLSM的速度控制环中。DDPG自适应控制器强化代理是在Actor-Critic网络基础上建立的,Actor网络实现了策略的最佳近似,Critic网络实现了价值函数的最优逼近,采用参数随机OU噪声动态调整等策略,提高了神经网络的收敛速度,同时提高了控制系统的精度。
本文利用Matlab/Simulink软件包中现有的工具和库,对PID控制器和DDPG自适应控制器的性能进行了比较研究,并通过不断在Simulink上仿真训练,优化DDPG自适应控制器。模拟仿真后,实验结果表明:DDPG自适应控制器可以实现对非线性系统的稳定跟踪控制, 并且与传统的PID控制相比, 基于DDPG自适应控制器控制器具有响应速度快, 自适应能力强, 抗干扰能力强,跟随效果好等优点。
猜你喜欢
体育科技文献通报(2022年3期)2022-05-23 13:46:54
新高考·高二数学(2022年3期)2022-04-29 05:08:09
趣味(数学)(2018年12期)2018-12-29 11:24:00
电子测试(2018年15期)2018-09-26 06:01:04
现代营销(创富信息版)(2018年8期)2018-09-08 08:51:50
中学数学杂志(初中版)(2016年5期)2016-11-01 11:22:43
学生天地(2016年23期)2016-05-17 05:47:15
自动化学报(2016年8期)2016-04-16 03:38:51
西北工业大学学报(2015年1期)2016-01-19 03:29:56
哈尔滨师范大学自然科学学报(2015年6期)2015-04-23 08:20:35
