12-6台体型并联机构位置正解的唯一性分析
2020-05-21 10:49:02尤晶晶朱俊豪符周舟双家炜
机械设计与制造 2020年5期
尤晶晶,朱俊豪,符周舟,双家炜
(1.南京林业大学机械电子工程学院,江苏 南京 210037;2.江苏省精密与微细制造技术重点实验室,江苏 南京 210016;3.南京林业大学汽车与交通工程学院,江苏 南京 210037)
1 引言
并联机构具有高刚度、高精度等优点,愈发受到关注[1],其中的六自由度并联机构在传感器[2-3]、模拟器[4]等领域有着非常良好的应用前景。并联机构的运动学正解算法是研究其动力学控制、奇异位形、工作空间等问题的基础,甚至可以说,正解问题不解决,后续工作将举步维艰。针对该问题,国内外学者提出了很多不同的方法,如对偶四元数[5-6]、粒子群[7]、拓扑结构[8-9]。从算法形式来划分,并联机构的运动学正解又可以分为解析法、数值法和半解析法(本质上也是数值法)。其中,数值法适用于任何构型,但运算效率低、过度依赖于给定的初值且容易失根。相比较,解析法有明确的数学表达式,精确度高、运算效率高,有着数值法和半解析法无法比拟的优势,故六自由度并联机构要想得到大规模的实际运用,给出其正解的解析表达式极其重要。
从检索到的文献资料来看,并不是所有的六自由度并联机构都具有解析正解,而且,即使存在解析解,其推导过程也异常复杂,不利于程式化。在文献[10]中提出了一种可完全解耦的六自由度十二杆的台体型冗余并联机构,并给出了其运动学正解的求解流程。然而,进一步研究发现,由于不能确定正解的具体个数,该算法在处理几类特殊位形时存在增根或失根的可能性,这将影响机构的连续性控制。
针对上述问题,通过剖析文献[10]的正解算法,并结合机构拓扑构型内固有的尺度约束关系,对所有可能出现的特殊位形逐类进行分析,确定了新型并联机构的正解数,给出了最终的解析解表达式。最后,通过虚拟试验验证了算法的正确性。
2 结构模型及正解算法
2.1 结构模型
所讨论的并联机构共有12根初始长度为L的可伸缩支链,支链的一端通过一般球铰链与静平台相连,另一端通过复合球铰链与动平台相连,且每两条支链共用1个复合球铰链;动平台是边长为2n的正方体,静平台是边长为2(n+L)的空壳状正方体;初始状态下,动平台与静平台的中心点重合,且姿态相同;六个复合球铰链分别位于动平台的左上棱、后上棱、右后棱、右下棱、左前棱、前下棱的中点位置,如图1所示。
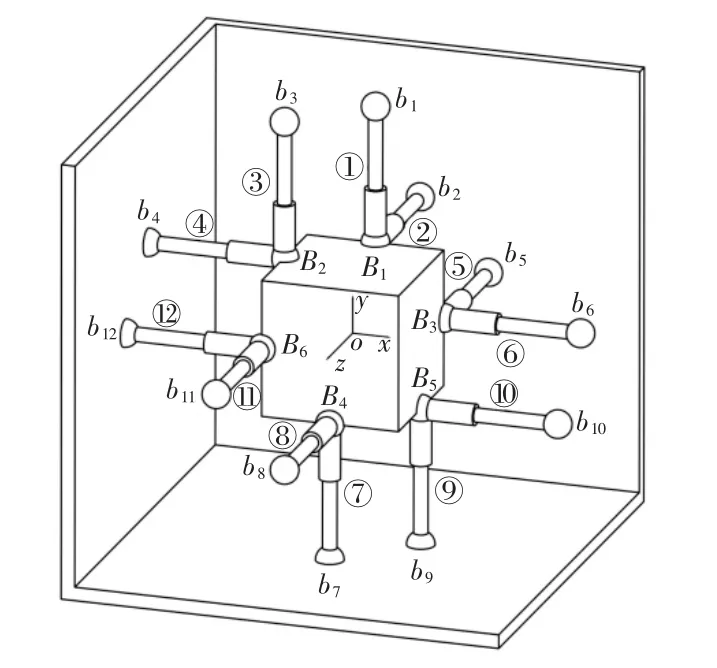
图1 初始位形下的机构简图Fig.1 Schematic Diagram of Mechanism in the Initial State
2.2 正解算法
以静平台的中心为原点,固连三维直角坐标系{o-x-y-z},其中,x、y、z轴分别指向静平台右侧面、上侧面、前侧面的中心点。将静平台上十二个一般球铰链的中心点记为b1~b12,动平台上六个复合球铰链的中心点记为B1~B6,动平台的中心点记为P,十二条支链记为①~12○,其实时杆长表示为li。分别将B1、B2、B3、P点的笛卡尔坐标表示为(x1,y1,z1)、(x2,y2,z2)、(x3,y3,z3)、(x0,y0,z0),因此,正解算法中共有十二个未知量。任意给定一组杆长,容易推导出y1、z1、x2、y2、x3、z3、x0、y0、z0这9个量的解析表达式[10]。然而,在特殊位形时,x1、y3、z2可能会出现多解。为便于讨论,这里首先对多解的情况进行分组,如表1所示。
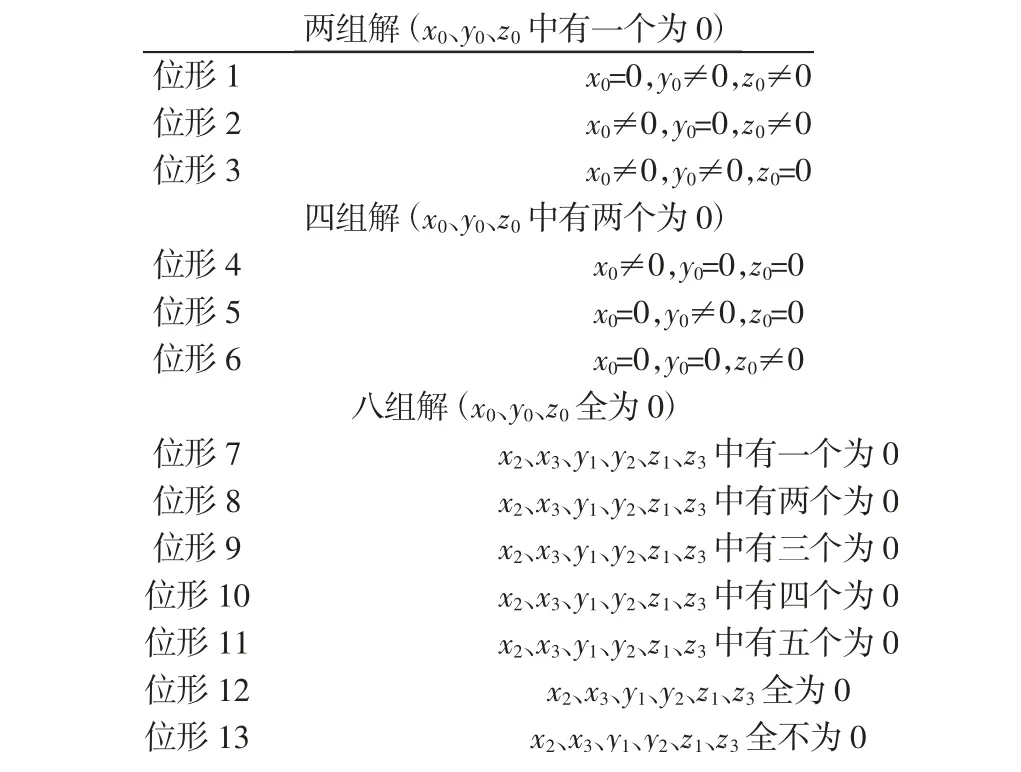
表1 多解情况的分组Tab.1 The Division of Situations of Multiple Solutions
3 正解唯一性分析
3.1 两组解的情况分析
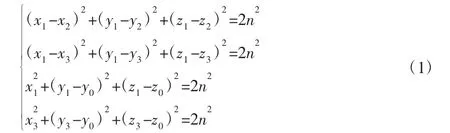
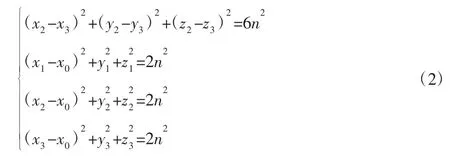
以位形1为例,2、3的分析过程与此类似。根据动平台上复合球铰链之间、复合球铰链与动平台质心之间的固有尺度约束关系,建立未知量之间的约束方程:
当x2≠0且x3≠0或者x2=0且x3≠0或者x2≠0且x3=0时,x1均具有唯一解。
构型中,B1B2平行于B3P,且B1、B2、B3、P四点共面。因此,当x2=0且x3=0时,x1只有零解。
综上所述,当x0,y0,z0中只有一个为0时,新型并联机构的运动学正解是唯一的。
3.2 四组解的情况分析
以位形4为例,位形5、6的分析过程与此类似。约束方程为:
当z1≠0且y1≠0或者z1=0、y1≠0且z3≠0时,y3、z2有唯一解。
当z1=0、y1≠0且z3=0时,y3有唯一解;另外,根据“四点共面”,z2的值等于0。同理,当z1≠0且y1=0时,y3、z2有唯一解。
当z1=y1=0时,若y2=z3=0,则由“四点共面”可得z2=y3=0;若y2=0且z3≠0,则z2有唯一解,且由“四点共面”得到y3=0;若z3=0且y2≠0,同理可得,y3、z2只有唯一解;若z3≠0且y2≠0,由“四点共面”可得z2≠0、y3≠0,且:
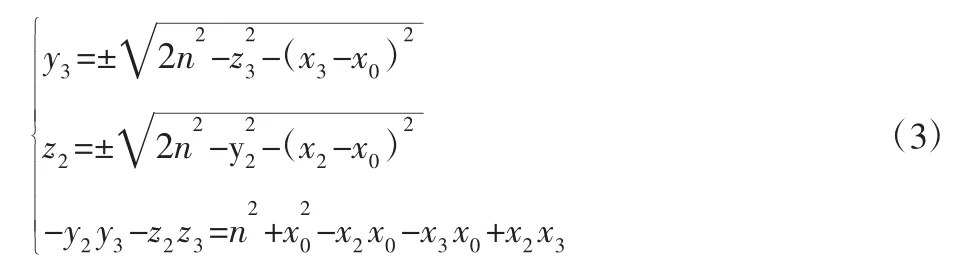
为更好地描述式(3)中变量之间的几何关系,以y3、z2为正交轴建立辅助笛卡尔坐标系,如图2所示。
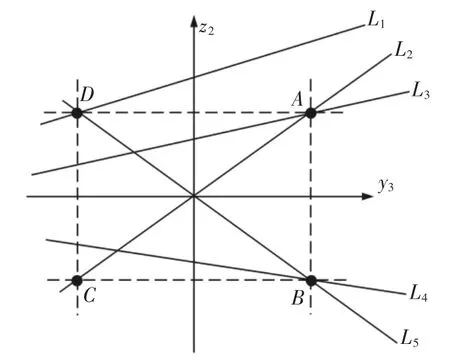
图2 辅助笛卡尔坐标系Fig.2 The Auxiliary Cartesian Coordinate System
式(3)中的前两个方程在坐标系中表示为四条直线,如图2中的虚线所示,它们的四个交点A、B、C、D关于原点对称。第三个方程为一条斜线,理论上它与A、B、C、D可能有一个交点(如L1、L3、L4等),也可能有两个交点(如L2、L5等),而后者一定对应着斜线过原点的情况。由于z1=y1=y0=z0=0,故B1、P点在x轴上;又因为B2与B1、P的距离相等,故B2在x轴上的投影为B1、P的中点。同理,B3在x轴上的投影也为B1、P的中点。又由于n>0,故第三个方程对应的斜线一定不可能过原点。综上所述,当x0,y0,z0中有两个为0时,正解是唯一的。
3.3 八组解的情况分析
约束方程为:

3.3.1 位形7
以x2=0为例分析,其它五种情况与此类似。
结合式(4)可知,x1、y3有唯一解。
3.3.2 位形8
仅分析三种典型情况,其它与此类似。
当x2=x3=0时,由“四点共面”关系得到x1、y3、z2的唯一解。
当z1=y1=0时,x1、z2、y3有唯一解。
当x2=z1=0时,x1、z2、y3有唯一解。
3.3.3 位形9
仅分析两种典型情况,其它与此类似。
当x2=x3=z1=0时,由“四点共面”关系得到x1、y3、z2的唯一解。
当x2=z1=y2=0时,z2有唯一解。此时,B2、P点都在z轴上;又因为B2P平行于B1B3,所以B1B3也平行于z轴,即y3=y1且x1=x3。因此,x1、y3的解唯一。
3.3.4 位形10
以x2=x3=z1=y1=0为例进行分析。由“四点共面”得到x1=0;再结合式(4),z2、y3的解唯一。
3.3.5 位形11
以x2=x3=z1=y1=y2=0为例进行分析。z2的解唯一;再结合“四点共面”关系,得到x1=y3=0。
3.3.6 位形12
直接由“四点共面”关系得到:x1=y3=z2=0。
3.3.7 位形13

当上述行列式的值等于零时,方程组发生退化;但此时由“四点共面”的几何特征关系可得:
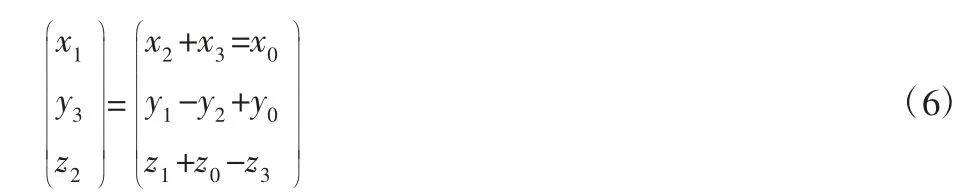
综上,当x0,y0,z0全部为0时,正解也是唯一的。
4 虚拟试验的算例验证
运用Mathematica软件建立新型并联机构的虚拟样机,如图3所示。其中,质量块的边长和支链的初始长度分别设置为30mm、25mm。虚拟试验中,通过给定并联机构12条支链的长度,可以测量出动平台的位置、姿态数据以及所有特征点的坐标值;相反地,通过给定动平台的位置、姿态或者三个非共线特征点的坐标值,也可以测量出12条支链的长度数据。

图3 并联机构的虚拟样机Fig.3 The Virtual Prototype of Parallel Mechanism
给出三个典型算例,首先,基于正解算法计算特征点的坐标值;然后,将理论计算值与试验测量数据进行对比,如表2所示。结果显示,该新型并联机构具有确定的、唯一的运动学正解,且计算值与试验值完全吻合,表明这里的算法是正确、有效的。
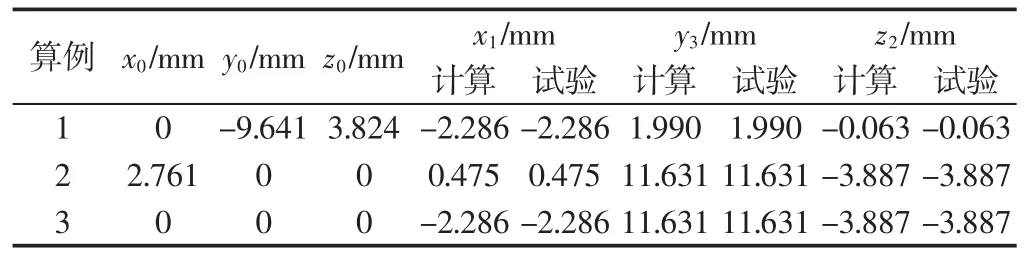
表2 并联机构正解模型的算例验证Tab.2 Exam ples of Forward Kinematics of Parallel Mechanism
5 结论
针对一种新提出的12-6台体型并联机构,对其正向运动学算法进行了剖析,从理论上证明了该机构的运动学正解不存在增根和失根的现象,并推导出了全解析表达式。进一步通过虚拟试验验证了所提出方法的正确性和有效性。研究结果表明,当给定一组合适的杆长时,并联机构动平台的位姿能够唯一确定,这为机构后续的实时、有效控制奠定了理论保障。下一步工作计划是从输入、输出量的解析映射出发,推导并求解杆长协调方程。
猜你喜欢
振动与冲击(2022年11期)2022-06-17 03:03:32
民用飞机设计与研究(2019年2期)2019-08-05 01:33:44
北京汽车(2019年6期)2019-02-12 05:19:50
汽车电器(2018年10期)2018-11-01 01:17:26
河北工业大学学报(2016年1期)2017-01-06 13:42:10
大众科技(2015年11期)2015-11-24 01:57:16
组合机床与自动化加工技术(2015年1期)2015-11-03 07:17:34
实用手外科杂志(2015年2期)2015-08-28 09:50:56
饲料博览(2015年4期)2015-04-05 10:34:14
北京航空航天大学学报(2014年1期)2014-12-19 08:58:38