
四轮独立驱动电动汽车直驶稳定性协调控制研究
2020-05-21 10:44贺志颖王文格
机械设计与制造 2020年5期
贺志颖,王文格,黄 龙
(湖南大学机械与运载工程学院,湖南 长沙 410082)
1 引言
四轮独立驱动电动汽车四车轮直接由轮毂电机驱动,具有传动链短、传动效率高、各驱动轮可独立控制且响应迅速等优势[1],解决了传统车辆轮间驱动转矩不可单独调节的问题,然而也引出了四轮驱动转矩协调控制的问题。文献[2]分析了两侧车轮驱动转矩差异与车辆直驶稳定性的关系。文献[3-4]研究了轮毂电机稳态误差和动态误差对电动车直线行驶的影响。文献[5]研究了车辆进入驱动防滑工况时产生的横摆角速度和横摆力矩等问题。目前有关直线行驶稳定性的研究多数选取横摆角速度为单一控制变量,以保证车辆直线行驶,而忽略车轮滑转率对车辆直线行驶过程中稳定性的影响。选取横摆角速度、滑转率为控制变量,设计了四轮独立驱动电动汽车直驶稳定性协调控制系统,保证车辆直线行驶及行驶过程中的稳定性,并以高、低附着路面、对开路面等工况验证了该协调控制系统的有效性。
2 车辆直驶稳定性分析
车辆直驶稳定性主要包括直线行驶和稳定行驶。如图1所示,车辆以速度行驶,前轮转角为0,当车辆两侧车轮驱动力失衡时,假设Fx2+Fx4>Fx1+Fx3,两侧车轮纵向驱动力将绕质心轴产生逆时针方向的力矩。为达到运动平衡状态,轮胎发生侧偏,车轮前后轴侧向力Fyi(i=1,2,3,4)将绕质心轴产生顺时针方向的力矩,以抵制横摆角速度ωr的增大。随着轮胎侧向力增加,最终车轮纵、侧向力绕质心轴产生的力矩平衡。此过程会产生一个非0的横摆角速度ωr和侧向分速度Vy,致使车辆行驶持续跑偏。另外当车辆行驶在低附着路面时,车轮驱动转矩很容易超过路面提供的最大作用力矩,使车轮出现过度滑转,车辆抵抗侧向干扰的能力被削弱,即使受到很小的侧向力作用,车轮也会发生侧滑,使车辆不能稳定行驶,并且加剧车辆跑偏。
故车辆直线行驶跑偏的原因是车辆两侧车轮驱动力不平衡,使车辆产生横摆角速度,导致车辆发生横摆运动,偏离预定轨迹,尤其当车轮发生过度滑转时,车辆发生侧滑,失去稳定性,跑偏量会进一步增大。因此选取车辆质心处横摆角速度、车轮滑转率作为控制变量,实时监测车辆直线行驶状态,协调控制四轮驱动转矩,避免车轮发生过度滑转,同时纠正车辆跑偏,提高车辆直驶稳定性。
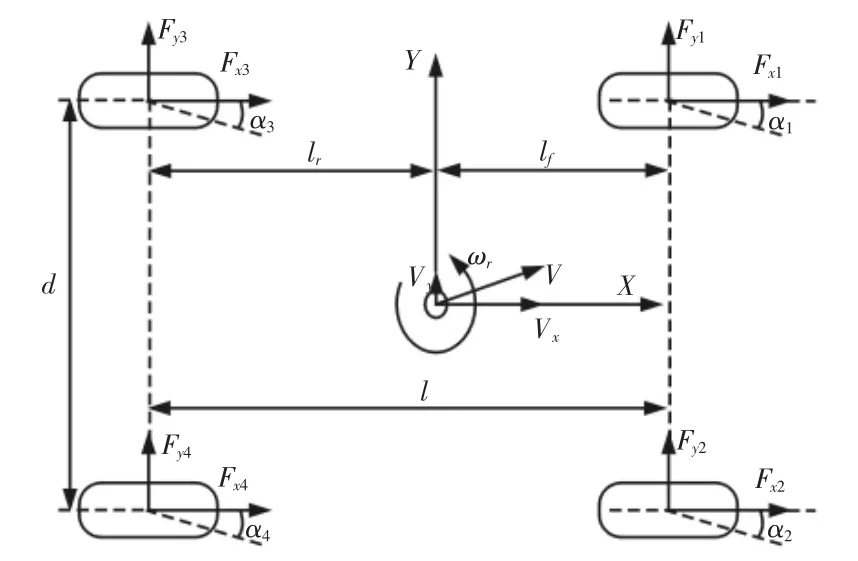
图1 车辆动力学模型示意图Fig.1 Vehicle Dynamic Model
3 整车模型
基于Carsim-Simulink联合仿真的方式,采用Carsim软件中的车辆模型,并在MATLAB/Simulink中建立轮毂电机模型,完成整车模型的搭建。
3.1 车辆模型
在Carsim软件中选择C级车,保留车辆默认的转向系统、悬架系统,将其动力传动方式改为四轮驱动,其动力装置为四个轮毂电机,同时将四轮驱动转矩设置为车辆模型的输入量,另外将车辆车速、轮速、横摆角速度、车轮垂向载荷、侧向力设置为车辆模型输出量。车辆模型参数,如表1所示。
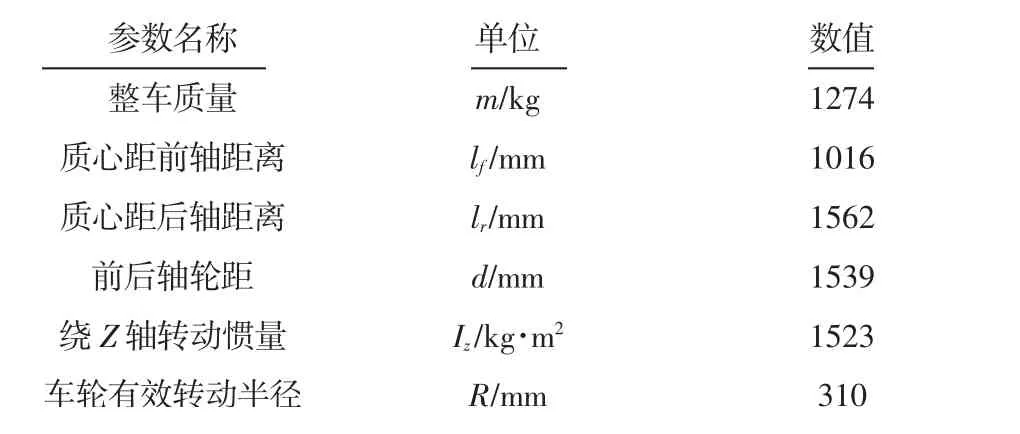
表1 车辆模型部分参数Tab.1 Vehicle Model Partial Parameters
3.2 电机模型
轮毂电机为四轮独立驱动电动汽车的动力装置,其特性直接影响车辆驱动协调控制效果,目前多数研究过于简化电机模型[6],直接按电机外特性曲线输出驱动转矩。在文献[7]基础上建立无刷直流电机单闭环转矩控制模型,其微分方程数学模型如下:
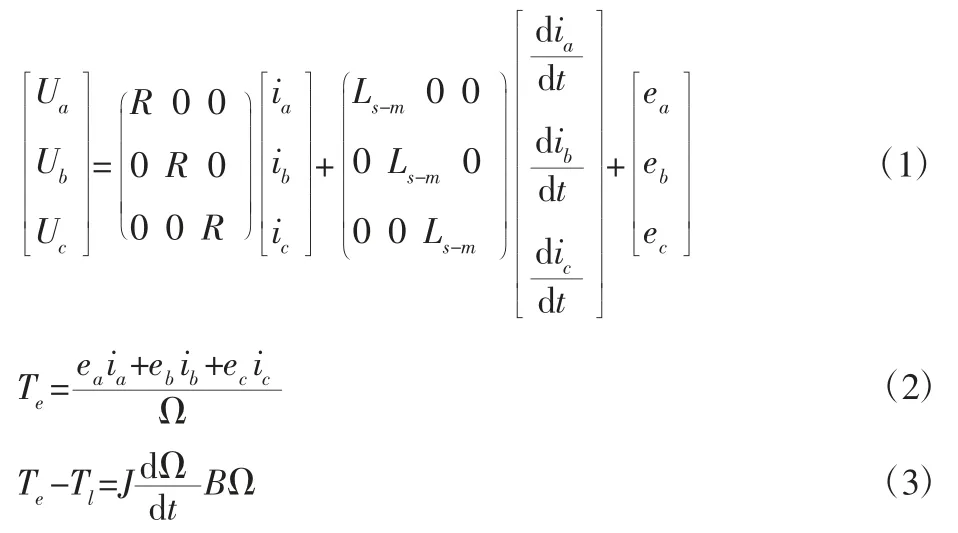
式中:Te—电磁转矩;
Tl—负载转矩;
B—粘滞摩擦系数;
J—转动惯量;
Ω—电机角速度;
Ua,Ub,Uc—绕组电压;
ia,ib,ic—相电流;
ea,eb,ec—相反电动势;
R—相电阻;
L—相绕组自感系数;
M—相绕组互感系数。
由于电动汽车采用转矩控制方式,而电机电流与输出转矩成正比,故设计单闭环电流调节系统实现对电流I的反馈控制即可实现对转矩T的闭环控制[7]。单闭环转矩控制系统框图,如图2所示。
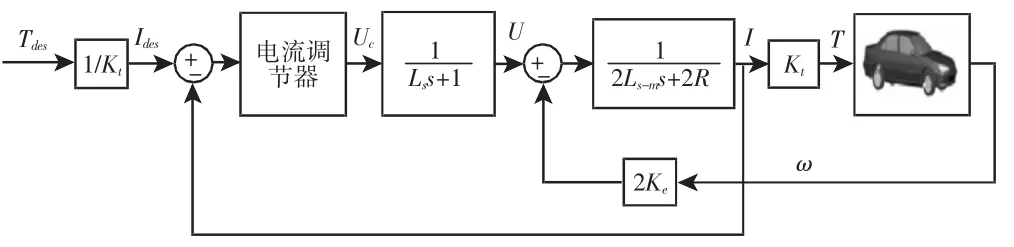
图2单闭环转矩控制框图Fig.2 Single Closed Loop Torque Control Block Diagram
图2 中Ks为可调节参数,电流调节器采用PID控制,有效调节了电机电流,实现对电机输出转矩的闭环控制。
4 直驶稳定性协调控制系统
如图3直驶稳定性协调控制系统采用分层控制逻辑,上层主要由速度控制器、附加横摆力矩控制器和驱动防滑控制器三部分组成,下层为驱动转矩协调分配控制器,将协调分配后的驱动转矩指令输出至轮毂电机。
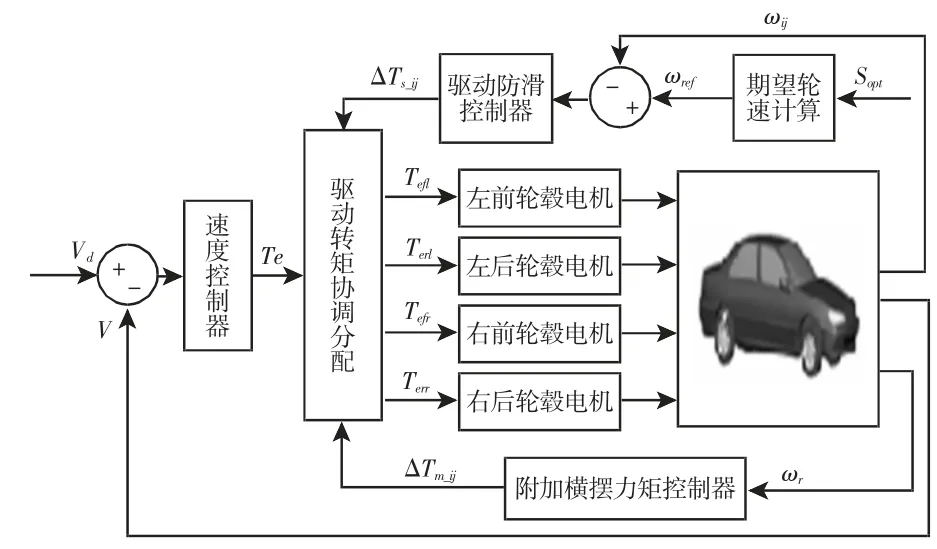
图3 直驶稳定性协调控制系统Fig.3 Straight Driving Stability Coordinated Control System
4.1 速度控制器
速度控制器输入量有2个:驾驶员期望速度vd及实际车速v。速度控制器通过两个速度的差值经过PI控制器计算车辆的期望转矩Te。

式中:kp,ki—PI控制器参数。
4.2 附加横摆力矩控制器
滑模变结构的滑动模态不受系统参数和外界扰动影响,具有良好的动态品质和鲁棒性[8]。在横摆运动平衡状态下,车辆前后轴车轮侧向力与车辆左右两侧车轮驱动力绕车辆质心轴产生大小相等,方向相反的力矩,为限制或消除车辆直线行驶时发生的横摆和侧向运动,需要调节两侧轮毂电机驱动转矩以产生附加横摆力矩。由车辆横摆运动方程得:

式中:Iz—车辆横摆转动惯量;ΔMz—所需的附加横摆力矩;Fvr=Fv3+Fv4,Fvf=Fv1+Fv2。
横摆角表征了车辆直线行驶跑偏方向,横摆角速度可表征车辆直线行驶跑偏方向改变速度。因此选取以上两者构成滑模变结构控制切换函数:

针对系统在非滑模态段的运动,采用带饱和函数指数趋近律:

由式(7)和式(8)得:

将式(9)代入式(5),计算纠正车辆直驶跑偏所需的附加横摆力矩:

4.3 驱动防滑控制器
当车轮处于过度滑转状态时,即使受到很小的侧向力作用,车辆也会发生侧滑,从而失去稳定性。因此,当车轮滑转率超过最优滑转率(Sopt=0.15)时,即认为车轮发生过度滑转,需要通过减小驱动转矩控制车轮转速,使得车轮运行在稳定的区间内。车轮滑转率可由式(11)获得:

式中:Sij—车轮滑转率;
ωij—车轮转速;
R—车轮半径;v—车速。
(ij=fl,fr,rl,rr—左前轮,右前轮,左后轮,右后轮)。
当车轮处于最优滑转率Sopt时,车轮具有期望角速度ωref,即期望角速度ωref和最优滑转率Sopt存在对应关系,如式(12)所示。
当车轮滑转率超过最优滑转率时,车轮实际转速大于车轮期望转速,此时车轮发生过度滑转,采用PI控制器对车轮转速进行控制,得到调节力矩,如式(13)所示。


式中:ωref—车轮期望转速;ωij—车轮实际转速;eij—车轮转速偏差;kp,ki—PI控制器的参数。
当车轮滑转率小于最优滑转率时,车轮实际转速小于车轮期望转速,车轮未发生过度滑转,处于正常状态,调节转矩ΔTs_ij=0。
4.4 驱动转矩协调分配
直线行驶协调分配的思路:根据车辆直线行驶状态,在保证车辆四个车轮不发生过度滑转前提下,满足驾驶员速度期望需求,实时调节四个电机的输出转矩,以产生附加横摆力矩,纠正车辆跑偏。在所有车轮正常驱动下,为尽可能有效快速地产生纠偏所需的附加横摆力矩,采用两侧调节的方式可以产生更大范围的附加横摆力矩值,快速有效地纠正车辆跑偏[9]。采用文献[10]前后轴垂向载荷比重的方式对获得的附加横摆力矩进行分配。
具体如下:
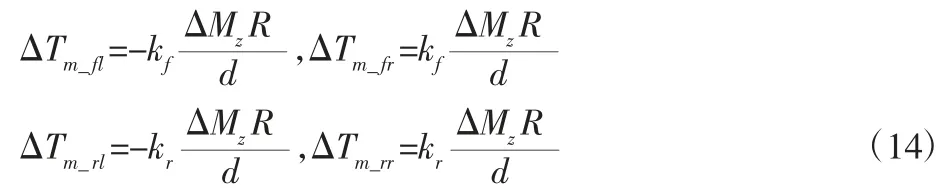
式中:kf、kr—前后轴载荷比重系数。
将驱动防滑控制器得到的转矩调节量ΔTs_ij与附加横摆力矩分配的转矩调节量ΔTm_ij相加得到每个车轮总的转矩调节量ΔTe_ij,从而调整驱动转矩Teij,动态调节两侧车轮驱动力平衡,以达到防止或消除车辆跑偏,保证车辆直线行驶的稳定性。协调控制流程图,如图4所示。

图4 协调控制流程图Fig.4 Coordinated Control Flow Chart
5 仿真分析
仿真对象为采用PID跟踪车速、转矩平均分配的车辆(标注为“无控制”)和基于附加横摆力矩和驱动防滑协调控制的车辆(标注为“协调控制”)。
仿真工况:车辆转角δ=0,车辆起步加速至期望车速60km/h,之后保持匀速行驶。仿真过程中不考虑车轮定位参数误差和侧向风影响。
5.1 高附着路面仿真分析
车辆在路面附着系数为1.0的高附着路面上行驶,仿真时间为10s。如图5(a)所示,在无控制及协调控制作用下车速均在5.5s时达到60km/h,车速均未发生超调。车辆跑偏量和车辆横摆角速度,两种控制作用下车辆横摆角速度和跑偏量数值都非常小,说明在高附着路面,两种控制方式使得车辆都具有较好的直线行驶能力,如图5(b)、图5(c)所示。车辆前后轮滑转率变化情况,车辆在附着系数为1.0路面上行驶,两种控制方式下,前轮滑转率保持在0.013,后轮滑转率保持在0.015,未发生过度滑转,此时协调控制下驱动防滑控制器输出调节转矩为0,如图5(d)、图5(e)所示。由此表明:两种控制方式都可以保证四轮独立驱动电动汽车在高附着路面的直驶稳定性。
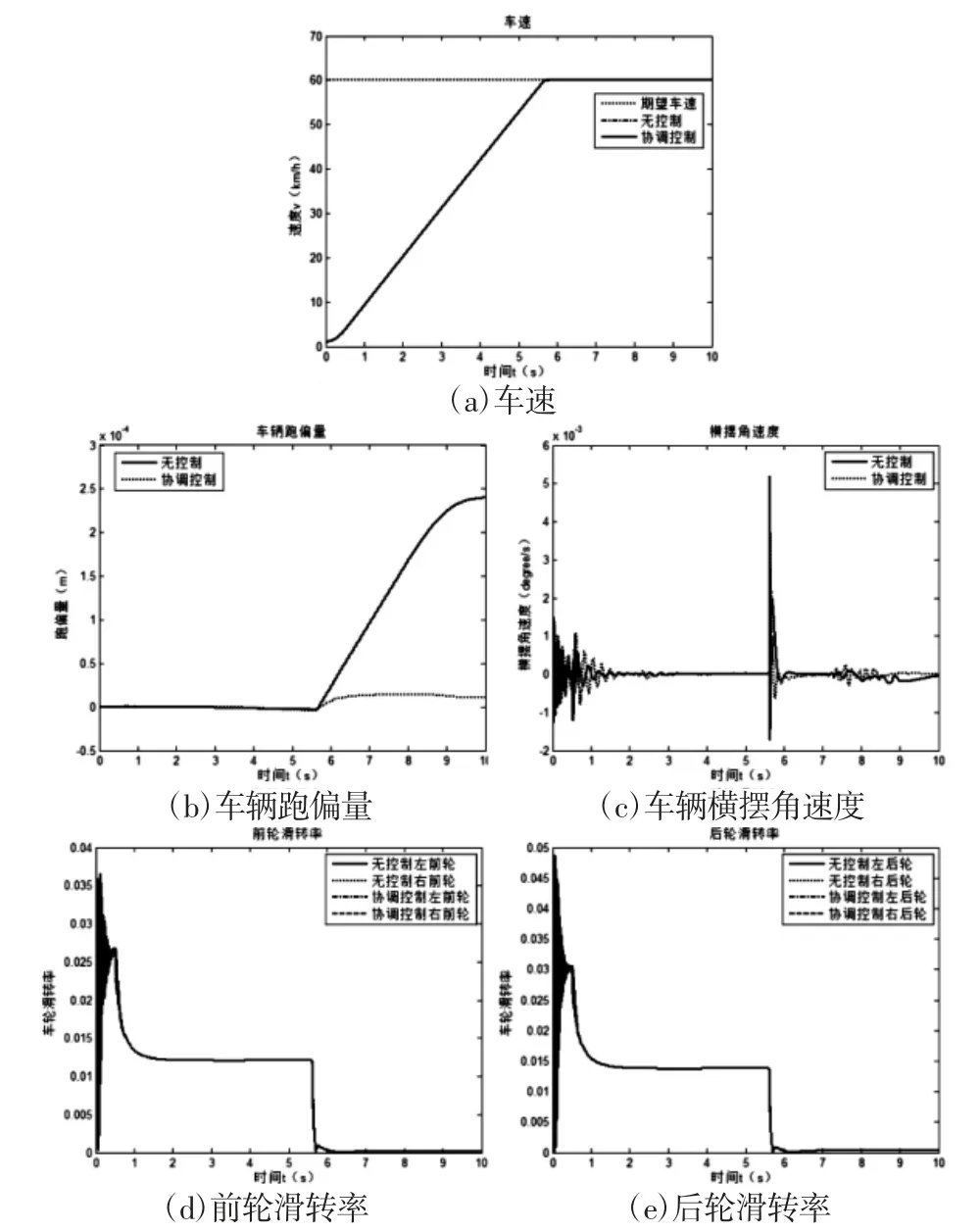
图5 高附着路面仿真曲线图Fig.5 Simulation Curve Under High Adhesion Road
5.2 低附着路面仿真分析
车辆在路面附着系数为0.2的低附着路面上行驶,仿真时间为10s。
如图6(a)所示,在无控制作用下车辆持续加速至62.5km/h,之后稳定在62km/h,车速产生超调,超调量为4.2%,稳态误差为2km/h。而在协调控制用下车速于8.5s达到60km/h,之后保持匀速行驶,车速未超调。车辆跑偏量和车辆横摆角速度,两种控制方式下车辆的横摆角速度和跑偏量都处于较小的范围,车辆具有良好的直线行驶能力,但协调控制相比于无控制效果更优,如图6(b)、图6(c)所示。车辆前后轮滑转率变化情况,车辆在附着系数为0.2路面上行驶,在无控制作用下车轮迅速打滑,滑转率迅速上升。在协调控制作用下,根据车轮实际转速,降低电机驱动转矩,使前后轮滑转率稳定在0.15,如图6(d)、图6(e)所示。由此表明:在低附着路面工况下,协调控制能够将两侧车轮的滑转率控制在最优滑转率范围内,避免车轮发生过度滑转,保证车辆行驶稳定性。
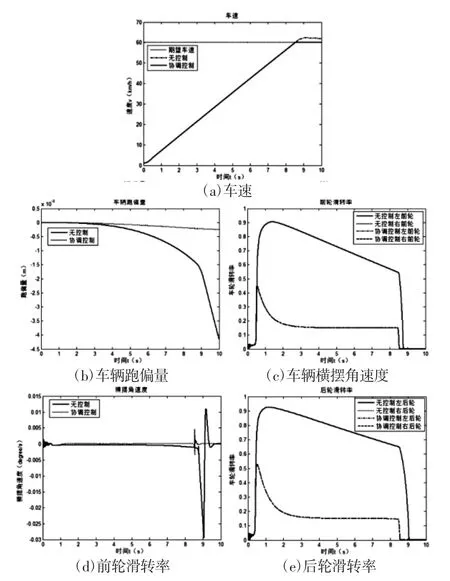
图6 低附着路面仿真曲线图Fig.6 Simulation Curve Under Low Adhesion Road
5.3 对开路面仿真分析
车辆在对开路面上行驶,左侧道路附着系数为0.2,右侧道路附着系数为1.0,仿真时间为10s。
如图7(a)所示,在无控制方式下,车辆加速性能较好,车辆持续加速至62km/h,之后车速保持在59.9km/h,车速产生超调,超调量为3.3%,稳态误差为0.1km/h。而在协调控制用下,车辆于9s加速至60km/h,之后保持匀速行驶,车速未超调。车辆跑偏量和车辆横摆角速度,无控制作用下车辆横摆角速度持续增大至11.8(°)/s,导致车辆发生严重的侧偏,跑偏量为11.4m,如图7(b)、图7(c)所示。而在协调控制作用下,车辆横摆角速度保持在0±0.05(°)/s范围内,车辆跑偏量为0.32m。车辆前后轮滑转率变化情况,由于左侧道路附着系数为0.2,右侧道路附着系数为1.0,在无控制作用下,左侧车轮迅速打滑,滑转率迅速上升,右侧车轮未发生滑转,4s之后由于车辆完全侧偏至左侧路面,导致右侧车轮迅速打滑,滑转率迅速上升,如图7(d)、图7(e)所示。而在协调控制作用下,根据左侧车轮实际转速,降低左侧电机驱动转矩,使左侧前后轮滑转率稳定在0.15,右侧车轮滑转率保持在0附近。由此表明:在对开路面工况下,协调控制能够将低附着路面一侧的车轮滑转率保持在最优滑转率范围内,保证了车辆行驶的稳定性,并且通过附加横摆力矩控制实时纠正车辆跑偏,保证车辆直线行驶的能力。
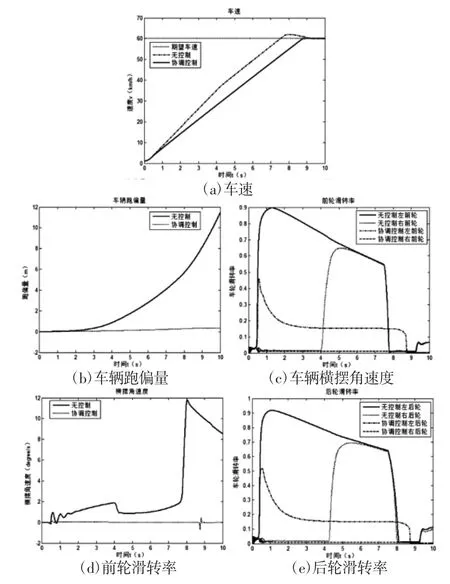
图7 对开路面仿真曲线图Fig.7 Simulation Curve Under Split Road
6 结论
基于车辆动力学软件Carsim与MATLAB/Simulink设计了四轮独立驱动电动汽车直驶稳定性协调控制系统,其中包括速度控制器、附加横摆力矩控制器、驱动防滑控制器的建立。通过联合仿真表明,在高附着、低附着及对开路面工况下,所设计的协调控制系统能满足速度期望需求,使车速达到期望车速。当车轮出现过度滑转时,驱动防滑控制器能够迅速将车轮滑转率限制在最优滑转率范围内,同时附加横摆力矩控制器快速纠正车辆跑偏,提高了车辆直驶稳定性。
猜你喜欢
小读者(2019年24期)2020-01-19
汽车观察(2019年2期)2019-03-15
中学生数理化·八年级物理人教版(2017年6期)2017-11-09
中学生数理化·高一版(2017年3期)2017-07-08
自动化学报(2017年4期)2017-06-15
发明与创新·中学生(2016年7期)2016-05-14
火控雷达技术(2016年1期)2016-02-06
中国塑料(2015年3期)2015-11-27
中国铁道科学(2015年4期)2015-06-21
空间控制技术与应用(2015年2期)2015-06-05
