
“双8”字轨迹无碳小车的结构设计与分析
2020-05-08 09:37王三川
机械工程师 2020年4期
王三川
(福州大学机械工程及自动化学院,福州350108)
0 引 言
第七届福建省大学生工程训练综合能力竞赛规则简介:设计一种小车,使其只借助砝码的重力势能而能够前进并转向,最终实现沿“双8”字轨迹行驶。如图1所示,比赛的场地在半张乒乓球桌上,桌上设有3个桩,并排列在一条直线上。两端的桩到中间的桩距离为350±50 mm,确切数字将在比赛现场由各组抽签后公布。比赛各组要求使用组委会官方统一提供的一定质量的砝码给参赛小车提供动力,要求小车以“双8”字轨迹交替绕过中线上3个障碍桩,并保证每个障碍桩在“8”字形的一个封闭圈内[1],同时在过程中禁止人为干扰小车的运行,直到小车碰到障碍物或者由于其他方式导致停车为止。完成的“双8”字圈数越多,则得分越高。值得注意的是,比赛并没有对小车的轨迹作严格的规定。根据规则,本文设计了一种基于凸轮的“双8”字无碳小车。
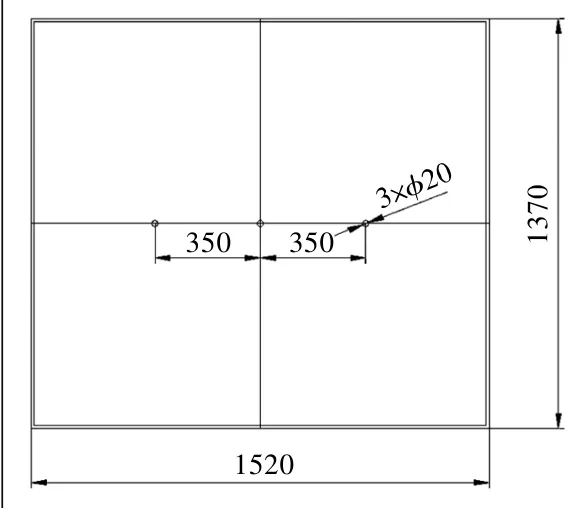
图1 比赛场地
1 轨迹设计
首先,需要设计小车的轨迹。因为小车的占地面积相对轨迹的图形大小不能忽略,故无法将小车的运动看成质点运动。在这种情况下,首先设计两后轮中心点的轨迹,并在之后的叙述中简称“轨迹”。
经历了数届的比赛,“双8”字轨迹无非用以下两种方案实现:方案一,2段圆弧加上2段余弦曲线;方案二,4段圆弧加上4段切线[2]。方案一虽然路径稍短,可以节省砝码的重力势能,并且在行走过程转向轮转角不会突变,但是轨迹距离障碍桩较方案二明显更近。如图2所示,将2个轨迹在同一张图中进行重叠比较(假定半车宽为80 mm,虚线为方案一、实线为方案二)。则方案二较方案一距障碍桩的最近距离提升率为
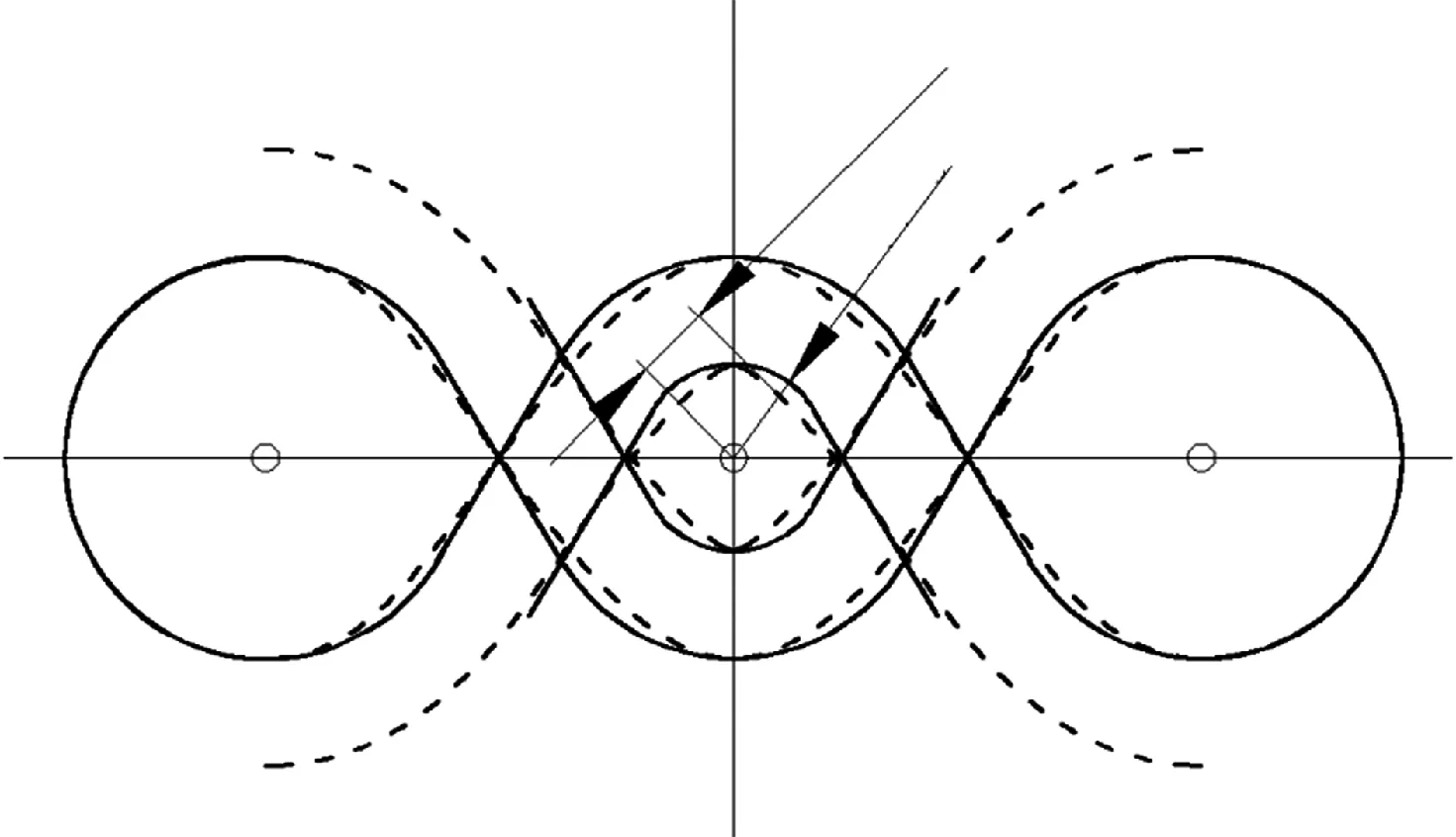
图2 两种方案轨迹比较

可以算出,如果采用方案二小车距障碍桩的最近距离可以提高大约22.61%, 这无疑大大降低了小车碰撞障碍桩的概率。
此外,方案二中转向轮转角虽然会突变,但是因为突变范围不大,车速不高,所以对小车行驶过程影响不大。其次,虽然方案一路径较短,看似节省了能量,但在实际比赛中经过观察,大部分参赛组都是在没有耗尽砝码重力势能之前就已经撞到了障碍桩,提前结束比赛。故在笔者看来,节省这部分能量的意义不大。
2 转向机构设计
为了控制转向的精度,两后轮必须有差速功能。实现差速要求可以有两种方案:1)单轮驱动;2)安装差速器。笔者推荐单轮驱动方案,理由如下:首先,虽然安装差速器的小车比单轮驱动的小车行驶速度更稳定,但结构更复杂,传动效率更低[3];其次,因为差速器精度要求高,制造难度大,且难以控制制造成本。所以本文中只将两后轮设计成一主动一从动的形式以实现差速功能。
由于左后轮作为主动轮或右后轮作为主动轮差别不大,笔者就选取左后轮为主动轮为例,读者可以根据自己的要求随意选择。先将原曲线向行进方向的左边偏移80 mm,得到主动轮轨迹曲线。此外,笔者发现,一圈完整的“双8”轨迹可以被分解成两段完全相同的曲线(图3实线和虚线),因此我们可以这样设计:小车走一圈,转向机构重复2个周期。

图3 转弯半径与转向角
本文取半车宽80 mm、前后轮距130 mm进行计算。这里要注意,在可能的情况下,前后轮距越短越好,因为轮距越短,前轮的最大转向角就越小,行驶越稳定。需要说明的是,为了示范,本文按照笔者当时设计的数据代入。读者亦可使用自己的数据代入以下公式进行计算。

根据此转向角,笔者对转向机构作如图4设计,抽象模型与相关数据如图5所示(部分数据可由计算机绘图软件直接量得)。

图4 转向机构

图5 凸轮行程计算
3 凸轮设计
根据图5可知,凸轮的行程为h=12.99×2=25.98 mm。在图3中借助计算机绘图软件AutoCAD分别量得AB、BC、CD、DE的长度或弧长,即主动轮(左后轮)的4段轨迹长度:AB=363.22 mm;BC=180.28 mm;CD=472.84 mm;DE=180.28 mm。总长AE=363.22+180.28+472.84+180.28=1196.62 mm。
对应的凸轮角度为:

根据以上数据,设计出如图6所示的凸轮(对心直动尖顶推杆盘形[4])轮廓(基圆半径取10 mm)。
4 后轮设计
之前已经计算过,凸轮回转的一个周期内,小车的主动轮(左后轮)行进距离为1196.62 mm。根据这个数据,我们来设计后轮的直径与传动比。其中,传动比需要由一对相互啮合的齿轮保证。由于齿轮工作强度不大,工作时间不长,耐磨性要求不高,故此时的齿轮齿数无需保证互质。在保证主动轮半径合适、齿轮制造难度不大的情况下,传动比可以按照需求在一定范围内任取。
笔者采用了传动比为1:3的一对齿轮作为凸轮轴与主动轮轴的啮合齿轮进行计算。则左后轮的半径应为R左后轮=AE/(3×2π)=1196.62÷(3×2π)=63.48 mm。

图6 凸轮轮廓
为了小车的美观,笔者将从动轮(右后轮)的半径设计成与主动轮(左后轮)相等。有设计者认为从动轮的半径较大会使小车质量变大,影响小车的动力性,故将从动轮的半径设计为较主动轮小,同时降低从动轮轴的高度。读者可以根据自己的喜好与需求选择一种方案进行设计。
关于车轮的材质,为减小地面的滚动摩擦,通常采用较硬的材质,如亚克力或铝合金,而避免使用质软的材质,如硬橡胶等[5]。
另外,在保证强度与刚度的情况下,车轮可以采用较薄的板材,在加工条件允许的情况下,甚至可以加工一定的倒角。这样做可以使车轮与地面接触面积减小,进一步提高行驶轨迹的精确性。CATIA三维建模结果如图7所示。
5 小车的速度控制
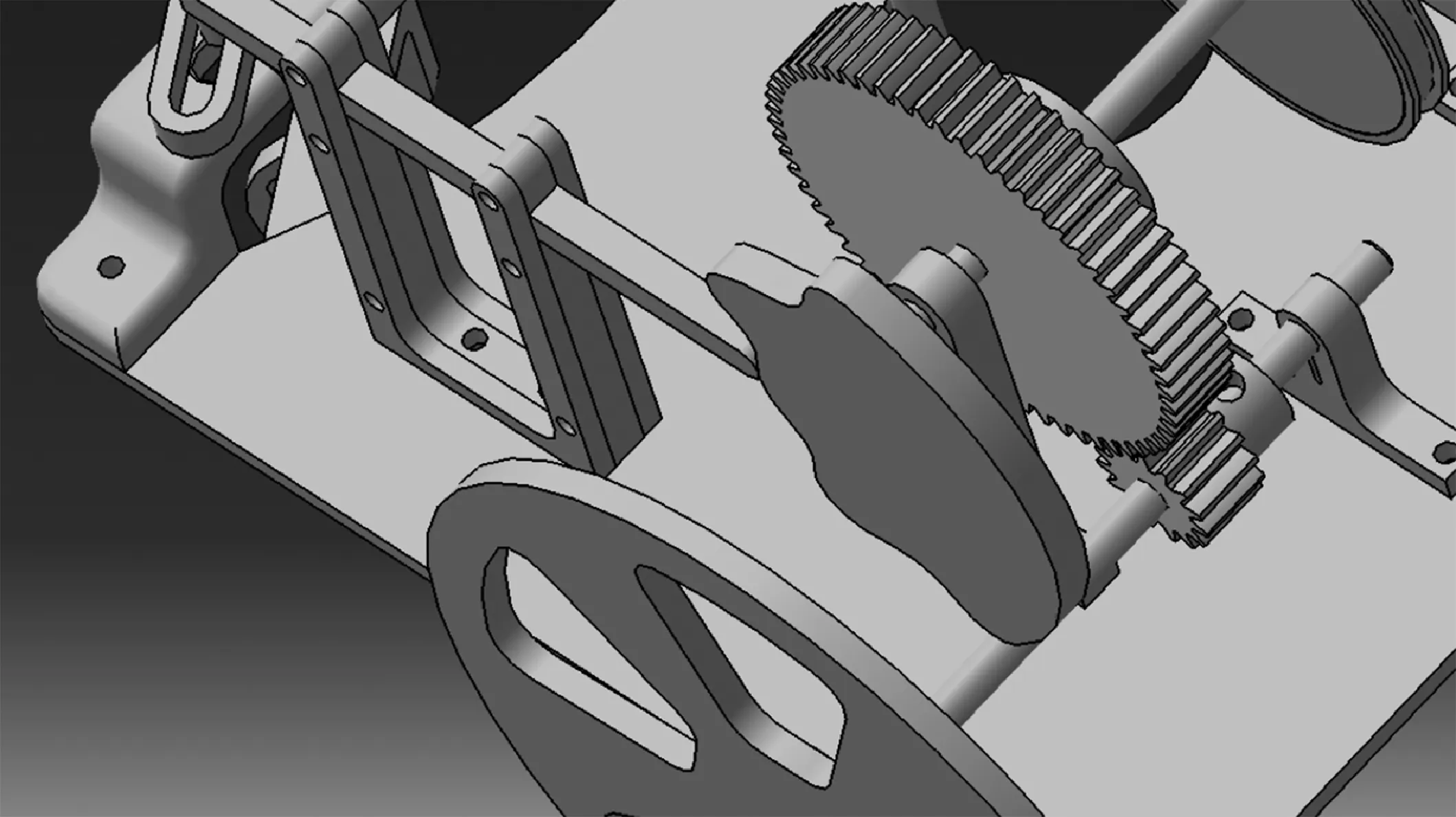
图7 主动轮与凸轮示意图
由于砝码质量较大,所以在小车行驶的初期,重心会较高。为了避免小车发生侧翻,必须要限制小车的最高速度。另外,由于凸轮的压力角不断变化,会导致小车行驶中受到的内部阻力不断变化,这将会导致小车行驶速度的不稳定。这里,笔者在主动轮轴上加装了一个减速装置,原理如图8所示,小盒子底部装有胀流型流体,其动力黏度随着角变形速度增长而增大[6]。当叶轮速度过快时,其产生的阻力将大大增大,可对主动轮轴起减速作用。此胀流型流体可由玉米淀粉加水混合而成,为生活中常见原料,制备成本低廉。值得注意的是,为了使小车达到最佳速度,在调试过程中可以在盒子里装不同浓度和不同液面高度的玉米淀粉溶液,并将此浓度和液面高度记录下来。由于这种流体无法长期保存,故在比赛时,我们可以根据之前的最佳浓度和液面高度现场制备和添加。
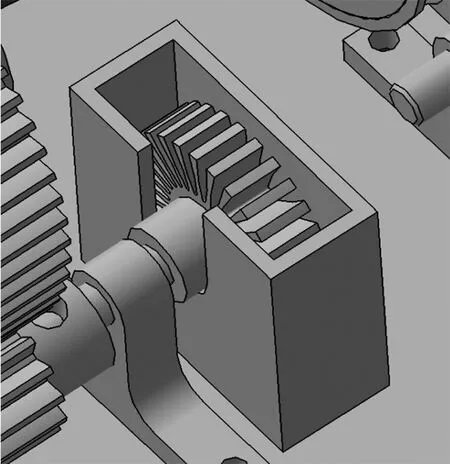
图8 速度控制装置
6 优化设计
至此为止,小车的主要结构已经设计完毕,接下来就可以进行优化设计。同样为了小车行驶稳定而不侧翻,要尽量降低小车的重心高度。笔者发现,降低底盘高度是一个既方便又有效的方法。根据以往的经验,底盘到桌面的距离取5 mm左右[7]较合适。小车中心如果还是过高,可以考虑在底盘上增加配重块。
此外,还可以对绕线轮进行优化。由于小车从静止到启动需要较大的力矩,可以将绕线轮做成阶梯轴式,绕线时只要将最后一圈绕在轴径较大的地方,便可增加启动力矩,改善小车的行驶平稳性。
7 结 语
本文通过对基于凸轮传动的“双8”字型无碳小车进行结构设计和分析,设计出如上机构,以使小车能够沿规定轨迹行驶。先通过对“双8”字轨迹进行分析,确定最佳的行驶轨迹;再对轨迹各段进行分析,确定前轮转向角;然后对凸轮的轮廓进行设计,确定小车的传动比、主动轮半径等相关参数;最后再控制小车的速度,并将小车进行优化设计,使小车的性能更佳。由于大部分参赛队伍都在砝码没有落到底之前结束比赛,所以本文中没有进行很多节省砝码能量的设计,换来的是小车结构的简单与生产制造的方便。在设计过程中充分运用了CATIA、AutoCAD等相关计算机制图软件,使小车的设计更为方便快捷。
猜你喜欢
汽车维护与修理(2022年5期)2022-09-06
商品与质量(2021年7期)2021-04-02
绿色科技(2019年22期)2019-12-30
高考·上(2019年1期)2019-09-10
小学生学习指导·爆笑校园(2019年6期)2019-09-10
数学小灵通(1-2年级)(2018年6期)2018-06-28
红蜻蜓·低年级(2015年11期)2016-02-02
汽车文摘(2015年3期)2015-12-11
数学大王·中高年级(2015年6期)2015-06-26
创业家(2015年2期)2015-02-27
