我国适航规定轻型水陆两栖飞机部分的修订建议
2020-05-06 06:25:26董一巍吕玥萱殷春平
航空工程进展 2020年2期
董一巍,吕玥萱,殷春平
(厦门大学 航空航天学院,厦门 361102)
0 引 言
近年来,我国在水陆两栖飞机研发领域取得了里程碑式进展:由中国航空工业集团公司研制的国内首款具有自主知识产权的轻型多用途水陆两栖飞机——海鸥300,由中国民用航空局依据CCAR-23部适航规定批准研制;中国首次按民航适航规章CCAR-25部自主研制的大型特种用途民用水陆两栖飞机鲲龙AG600实现成功双首飞。CCAR-23部《正常类、实用类、特技类和通勤类飞机适航规定》[1]和CCAR-25部《运输类飞机适航标准》[2]两项规章是我国通用飞机适航审定的主要参考,但由于水陆两栖飞机的独特设计和特殊用途,审查组和申请人需要在现有适航规定的基础上,结合国外相似机型的相关适航要求,确定国产水陆两栖飞机的型号审定标准。
目前,国内针对水陆两栖飞机通用航空适航审定领域的研究较少,相关研究多聚焦于大型水陆两栖飞机试验性质的适航认证。例如,回艳等[3]通过对AG600大型水陆两栖飞机特种工艺规范的研究,提出了AG600型号的特种工艺适航审查重点,形成了一套特种工艺规范的适航管理流程;何超等[4]参照现行的水陆两栖飞机适航要求制定了某型水陆两栖飞机的水上试飞测试改装方案,为开展相关水上试飞适航验证工作提供了参考。但上述研究多以现有适航规章为立足点开展,尚未基于水陆两栖飞机承担任务的特殊性来审视我国通用飞机适航规定中存在的可改进之处。
鉴于CCAR-23部是针对乘员和起飞重量较小的正常类、实用类、特技类和通勤类飞机型号的适航标准,而CCAR-25部侧重于起飞重量较大的运输类飞机,故本文将根据国内外现有的CCAR-23、CS-23及FAR-23通用航空适航规定,结合轻型水陆两栖飞机的实际用途,提出我国通用飞机适航规章针对轻型水陆两栖飞机的修订建议。经过完善的适航规定可以作为国产轻型水陆两栖飞机的安全研发导向,以期为其他类型国产水陆两栖飞机的适航审定提供参考,满足民用和国防需求。
1 水陆两栖飞机定义与发展
水陆两栖飞机指既能在陆地起降,也能在水面上起飞、停泊、降落的飞机。相较于单一功能的陆基飞机或水上飞机,水陆两栖飞机的优点显而易见[5]。
(1) 良好的低空飞行能力:水陆两栖飞机在飞行状态下可以比一般的飞机和直升机处于更接近地面或水面的高度,能够直接着水和着陆;
(2) 较强的起降环境适应性:水陆两栖飞机可以在一般的民用机场和水面较为平稳的水域直接起降,其航路不再受限于专用的机场;
(3) 受天气状况影响小:船舶和直升机很容易被恶劣天气因素影响,在遭遇恶劣天气时难以保持平常的航程和航速,而水陆两栖飞机可以更及时地到达指定地点完成任务。
水陆两栖飞机几乎与水上飞机同时出现,20世纪90年代以来,美国、日本、俄罗斯、加拿大、法国等共研制出水上飞机或水陆两栖飞机共22个型号,生产总数1 000余架[6]。各国现役水陆两栖飞机的典型型号如图1所示。

图1 现役水陆两栖飞机典型型号Fig.1 Typical models of active amphibious aircraft
美国是使水上飞机从试验品阶段迈入实用品阶段的先驱,如今更多地研制轻型水陆两栖飞机,较著名的型号有LAKE LA-250、LAKE-LA4-200、塞斯纳、美人鱼等。
日本于20世纪70年代自行研制列装了PS-1水上飞机。21世纪,在US-1A的基础上全面升级,生产了性能更加完备的US-2,它不仅能够执行搜救任务,还能够执行海上巡逻和反潜等作战任务。
俄罗斯在20世纪成功研制了A-40“信天翁”。2002年,Be-200“牵牛星”双发涡扇消防型水陆两栖飞机开始批量生产,同时具备发展为反潜巡逻型、海上搜救型和客货运输型的潜力。俄罗斯还研制了Be-103轻型水陆两栖飞机和“澳洲野狗”多用途轻型水陆两栖飞机。
我国早在1919年就研制了第一架水上飞机“甲型一号”。20世纪70年代,水轰-5成功首飞。20世纪80年代初期,航空工业特种飞行器研究所/通飞研究院自行开发了A1、A2C系列超轻型水上飞机,可用于旅游观光、航空摄影、农业作业等用途。2010年11月10日,国内首款具有自主知识产权的轻型多用途水陆两栖飞机——“海鸥300”在石家庄首飞成功。2017年12月,大型特种用途飞机“鲲龙AG600”翱翔蓝天,成为我国民航工业发展的又一个里程碑。
2 国内外轻型水陆两栖飞机适航要求及对比分析
对CCAR-23部和CCAR-25部规章中针对水陆两栖飞机的条款进行总结归纳,如表1所示,可以看出:两部规章在一定程度上缺乏对水陆两栖飞机的适应性。
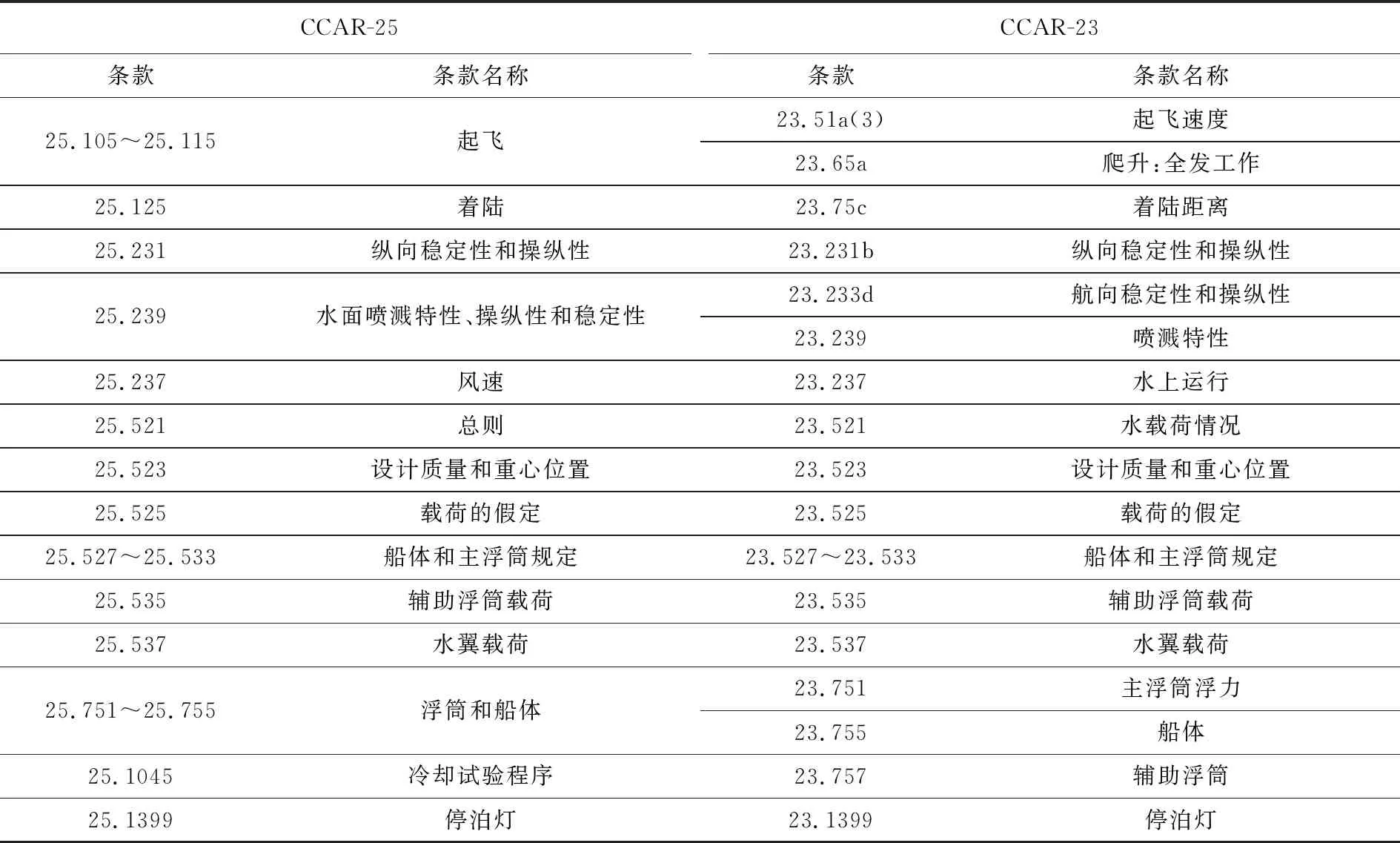
表1 CCAR-23部和CCAR-25部中水陆两栖飞机适航条例
鉴于国内同类飞机适航审定经验相对薄弱,基于美国FAA、欧洲EASA的23部规定(括号内数字为该内容在CCAR-23中的条目)中的相关内容,分析轻型水陆两栖飞机的具体适航要求。
2.1 国内外轻型水陆两栖飞机适航要求的共通点
2.1.1 飞行性能和特性
(1) 对正常类、实用类、特技类飞机,抬前轮速度VR是飞行员做出操纵想使飞机升离道面或水面的速度。对水上和水陆两栖飞机从水面起飞,VR是在所有合理预期的条件,包括紊流和临界发动机完全失效的情况下,表明安全的速度。(23.51)
(2) 当最大质量不超过2 722 kg(6 000 lb)(1 lb=0.453 592 4 kg)的活塞发动机式水上和水陆两栖飞机每台发动机不超过其最大连续功率、起落架处于收上位置、襟翼处于起飞位置、爬升速度符合规定的情况下,该飞机至少具有6.7%的定常爬升梯度。(23.65)
(3) 水上飞机和水陆两栖飞机,在水面上的任何正常使用速度上,不得有危险的或不可控制的海豚运动特性(23.231),着落时必须避免大的垂直加速度和水面打转的倾向(23.75),并且在最大风速下保持令人满意的水上航向稳定性和操纵性。(23.233)
(4) 水上飞机或水陆两栖飞机,在滑行、起飞和着水的任何时候,喷溅不得危险地模糊驾驶员的视线或损坏螺旋桨或飞机的其他部件。(23.239)
2.1.2 结构和载荷
(1) 水上飞机和水陆两栖飞机的结构必须根据在可能遇到的恶劣海上条件下正常运行时很可能出现的任何姿态,以相应的向前和下沉速度起飞和着水过程中所产生的水载荷进行设计。(23.521)
(2) 必须在直到设计着水质量的各种运行质量下满足水载荷要求,但在必要条件下必须采用水面设计起飞质量(水面滑行和起飞滑跑的最大质量)。设计重心时需考虑水上飞机结构每一部分的最大设计载荷。(23.523)
(3) 一般起飞情况下,在着水时,假定水上飞机的气动升力为水上飞机重力的 2/3。(23.525)
(4) 水上和水陆两栖飞机水面反作用载荷系数计算、着水情况水载荷合力计算、船体和主浮筒底部压力计算、框架、龙骨和舭结构压力分布计算、辅助浮筒限制载荷的计算在三部规定中均相同。(23.527~23.535)
(5) 水上飞机或水陆两栖飞机的每个主浮筒必须具有比在淡水中承托该飞机最大质量所需该浮筒浮力大80%的浮力,并有足够的水密隔舱来合理保证在任一主浮筒的任何两个隔舱注满水时,水上飞机和水陆两栖飞机仍能浮在水面上而不倾覆。每个主浮筒必须具有不少于4个体积大致相等的水密隔舱。(23.751)
(6) 最大质量等于或大于680 kg(1 500 lb)的船体式水上飞机或水陆两栖飞机,其船体必须有水密隔舱。对于最大质量等于或大于2 268 kg(5 000 lb)的飞机,其设计和安排应使船体辅助浮筒和气囊(假如使用气囊)能在任何两个相邻的水密隔舱注满水时保持飞机漂浮在淡水中而不倾覆;对于最大质量为680 kg(1 500 lb)直到(但不包括)2 268 kg(5 000 lb)的飞机,其设计和安排应使船体辅助浮筒和气囊(假如使用气囊)能在任何单个水密隔舱注满水时保持飞机漂浮在淡水中而不倾覆。(23.755)
(7) 辅助浮筒的安排必须保证当其全部浸没在淡水中所提供的恢复力矩,至少为水上飞机或水陆两栖飞机倾斜时产生的倾覆力矩的1.5倍。
2.1.3 航电系统
水上飞机或水陆两栖飞机所需要的每个停泊灯的安装必须在大气洁净的夜间至少能够在3.2 km(2 nmile)(1 nmile=1.852 km)的距离内显示白光,且当该飞机在水上停泊或漂泊时,应尽可能显示最大无间断的灯光。可以使用外部吊灯。(23.1399)
2.2 国内外轻型水陆两栖飞机适航要求的差异
2.2.1 CS-23
(1) 评估水上或水陆两栖飞机的着陆特性并确定着陆距离时,着陆点距离是指飞机以每小时5.6 km(3 kn)(1 kn=1 nmile/h=0.514 444 m/s)的速度降落的距离,而不是对陆基飞机而言的,从着陆点上方15 m(50 ft)(1 ft=0.304 8 m)的飞行路径上的某一点到飞机完全停稳的水平距离[7]。(23.75)
(2) 评估水上或水陆两栖飞机的纵向稳定性和操纵性时,应该在适用于该飞机的各种跑道上、尽可能多的不同的水面条件下,起飞、滑行和着陆,直到确定该飞机稳定性和操纵性下的最大浪高[7]。(23.231)
(3) 水陆两栖飞机应具备适当的航向稳定性和操纵性,可从水中滑行至陆上设施,反之亦然,除非无需这种操作[7]。(23.233)
(4) 具有反推系统的飞机,应该确定在水上飞机的正常水上操作条件下,飞行员的视野不会因为反向气流的喷射而模糊,导致危险[7]。(23.933)
(5) 对于单发涡轮发动机和往复式发动机的船体式水上飞机,通过顺风滑行评估其冷却性能时,该飞机应以高于步速9.3 km/h(5 kn)的速度滑行至少10 min。每隔1 min记录冷却数据[7]。(23.1047)
2.2.2 FAR-23
FAR-23部第五修正案于2017年8月30日生效,在此之前,FAR-23部与我国CCAR-23部对水陆两栖飞机的适航要求基本一致,但此后FAR-23部不仅取消了实用类、特技类和通勤分类,而且将大部分细则从适航法规中移除,加入行业标准中,其中就包括水陆两栖飞机的一些条目。目前,与CCAR-23相比,FAR-23中只列出了定常爬升梯度(23.2120)、浮筒浮力要求(23.2310)和航行灯光(23.2530)三方面的水陆两栖飞机相关规定[8]。
2.3 现有适航标准的特点及不足
FAR-23和CS-23均特别规定了水陆两栖飞机在飞行性能和载荷方面的适航要求。相比于FAR-23,CS-23涵盖水陆两栖飞机的条目较多,提出了该类飞机额外的在起飞距离、起飞速度、水面纵向和航向稳定性、滑行稳定性、喷溅特性和反推气流喷射安全性方面的要求。通过对比分析,可知:
(1) 在飞行特性方面,现有的适航规定仅对起飞、着陆的极端危险情况予以避免,但飞行性能标准中的大部分参数是按照陆基飞机的工作情况定义的,如起飞滑跑距离、起飞航迹、着陆进场速度、着陆距离等。在地面状况由硬质地面变为具有一定风浪的水面时,适航参数的种类和定义如果不作改变,将不能适用于水面验证。
(2) 现有的轻型水陆两栖飞机的结构和载荷方面的适航标准最为系统和完整,该部分针对水陆两栖飞机的船体、浮筒、水密舱提出了适航要求,其中主浮筒的设计和稳定性验证方法也较为成熟[9],还包括了针对该类飞机的不同任务模式(三种断阶着水情况)下载荷的详细数值分析过程[10]。但规定仍然缺少该类飞机特有的零件与系统(如水面转向系统)的相关适航要求。
(3) 在航电系统设计方面,现有适航规定鲜少区分陆基和水上飞机的航电控制系统,未注重水陆两栖飞机执行特殊任务时面临的复杂情况,如驾驶舱告警系统的欠缺考量可能会对该类飞机的安全性造成极大影响。
3 对我国轻型水陆两栖飞机适航审定标准的修订建议
3.1 起飞特性
现有的23部法规均采用起飞抬前轮速度(VR)来制定一个安全且标准化的程序,VR则由最小定常飞行速度VS1和地面最小操纵速度VMCG共同确定。但是在实际应用中,水陆两栖飞机水上起飞的情况与陆基飞机在跑道上起飞的情况有很大不同:一是飞机在水面上起飞时受到静浮力、水动力、气动力等力和力矩的复杂作用,这些力和力矩会随着飞机速度和姿态的改变发生巨大变化,造成飞机起飞过程中的纵向不稳定,因此飞机在水面起飞时具有一个与速度和姿态相关的稳定区域[11],如图2所示,水陆两栖飞机的水面最小操纵速度主要受飞机稳定上边界限制,一旦超出限制,飞机便会出现弹跳、海豚运动等危险动作;二是飞机从水面起飞时不存在抬前轮的动作,飞行员通过操纵升降舵使飞机在不发生“海豚运动”的情况下改变飞机姿态,从而顺利升空,在23部中表述为“是在所有合理预期的条件包括紊流和临界发动机完全失效的情况下表明安全的速度”。
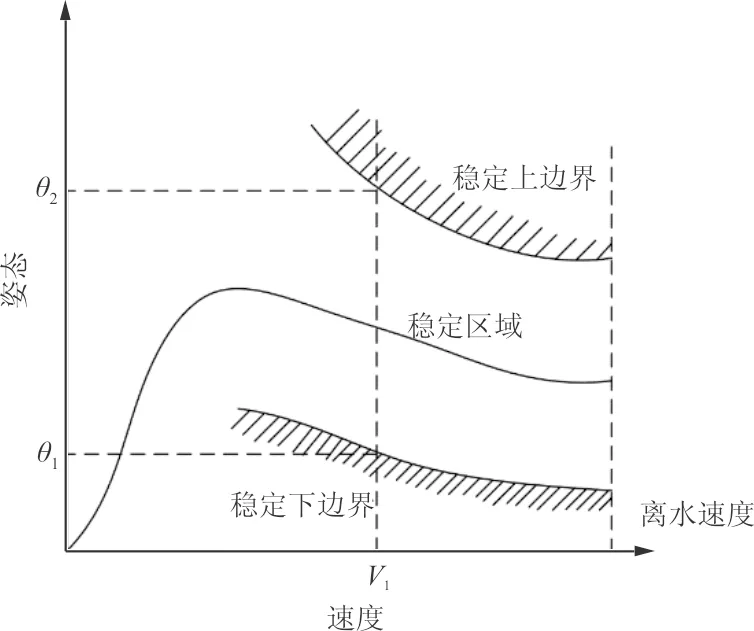
图2 水陆两栖飞机水面纵向运动稳定边界示意图Fig.2 Diagram of stability boundary of surface longitudinal movement of amphibious aircraft
由此可见,现有的以VR为基础的标准化程序并不适用于水陆两栖飞机的适航验证。应针对水陆两栖飞机从水上起飞的特点制定符合性适航标准。
针对起飞速度,适航规定里应以最小定常速度VS1或起飞速度VMC为参考,完善对水陆两栖飞机在水面起飞过程的水面最小操纵速度VMCW和抬前轮速度VR的规定,进而完善飞机的起飞安全速度V2、参考着陆进场速度VREF、加速-停止距离的定义,使其同样适用于飞机水上起飞的情况。
3.2 水面转向系统
水舵操纵系统是水上飞机用来控制水上航向的系统,主要靠操纵水舵来获得水中的操纵力以在水面保持或改变航向[12]。水舵一般安装在船体式飞机的底面尾部,由一根转轴控制,飞行员通过蹬动驾驶舱内的脚蹬实现水舵的偏转,从而操纵航向。某型飞机水舵操纵系统连接原理如图3所示,水舵与航电系统、机械作动系统相连接,从而实现对飞机水上机动的控制。此系统的典型机型包括俄罗斯的Be-200多用途水陆两栖飞机和国产水轰-5水上飞机。

图3 某型飞机水舵操纵系统连接示意图Fig.3 Diagram of water rudder control system of a certain type of aircraft
目前CCAR-23部中尚无针对水舵操纵系统的适航条款,因此建议增加水舵操纵系统的符合性适航要求,包括但不限于水舵操作要求,水舵与航电系统,机械操作系统交联规定,水面操纵性能要求,水舵中立位置告警,水舵失效要求等。
3.3 密封和腐蚀防护
复合材料在小型水上飞机上的应用十分广泛,全复合材料的小型水上飞机并不少见。水陆两栖飞机的工作环境较为恶劣:飞机在水面滑行取水或着水时,船体直接浸泡在水中,密封性能若较差将导致海水腐蚀机身和机体内部[13];飞机执行灭火任务时,处于火场的高温空气上方,机身易受高温影响;飞机在高湿度的环境中长期工作,也加重了材料的腐蚀,故而飞机的复合材料必须满足腐蚀防护和密封设计要求[14]。
在现有的23部规定中,“结构保护”条目(23.609)指出,结构零件应有适当保护、通风排水,以防止使用中由于气候、腐蚀等原因而引起性能降低或强度丧失;“结构的损伤容限和疲劳评定”条目(23.573)提到了复合材料机体结构的损伤评定,包括腐蚀引起的损伤扩展率。
目前我国已有针对轻型水陆两栖飞机的结构密封防水和排水设计[15],包括结合面、填角、缝隙密封防水方法和紧固件湿安装方法等,并通过了水密试验验证,符合适航规定的要求,但现有适航规定中仍缺少水陆两栖飞机结构和材料的防腐蚀性能、抗高温性能、密封性能的具体设计要求、工艺质量要求以及相关的零件安装要求,这将在很大程度上影响水陆两栖飞机的研发与维护。
3.4 航电系统
目前通用飞机的驾驶舱仪表布置和告警系统设计安装多是针对常规陆基飞机而言的,当水陆两栖飞机在执行特殊任务时,不匹配的告警系统可能产生混乱。例如,水陆两栖飞机进行森林灭火或水上救援时,因为飞行高度过低,可能触发地形告警、拉起告警等;当飞机在水上滑行、停泊时,触发起落架收起告警、水密舱进水告警等,这些系统信息会严重干扰飞行员对飞机情况的判断,影响飞行安全。
CCAR-23部第23.1309条“设备、系统及安装”中规定:当系统和有关部件在单独考虑以及与其他系统一起考虑时,“必须提供警告信息提醒机组注意系统的不安全工作情况并能使机组采取相应的纠正动作。系统、操纵器件以及有关的监视和警告装置的设计必须将可能产生附加危险的机组失误减至最小”。这说明如果告警系统设计理念不明确、设计准则不统一、设计流程方法可操作性不强,对驾驶安全有害无益。
目前各国的23部规定中还没有出现对水陆两栖飞机告警系统设计的补充规定,也缺少响应的验证方法,但一个适合水陆两栖飞机的、能对复杂任务环境做出准确判断和智能分析的驾驶舱告警系统是未来该类通用飞机不可或缺的一部分。以降落构型告警系统为例:如果水陆两栖飞机在襟翼和油门都处于进场位置降落时,起落架未全部放下并上锁,告警系统应该进行陆上降落告警;起落架并未完全收上到位并上锁,或水舵处于未回中位置,告警系统应该进行水上降落告警[16]。告警系统可通过情况选择开关进行控制,如图4所示。

图4 水陆两栖飞机模式选择告警系统示意图Fig.4 Diagram of alternative modes alarm system of amphibious aircraft
此外,水陆两栖飞机要完成水上救援和森林灭火任务,则必须在驾驶舱操作面板上加装额外的操纵与显示器件,例如水舵操纵开关、投水灭火开关、投水量实时显示、水密舱渗漏水液位监控显示等,此时操作面板的布局设计会更加困难。如果信息集成度较差,驾驶员受到的干扰会很强,极大地影响飞行安全,因此新的适航规定中应针对该类飞机的用途提出更加全面的航电系统适航要求。
4 结 论
(1) 在适航规定的飞行性能中,一部分与地面状况有关的性能参数没有考虑水面的特殊情况,飞机的水上操纵性没有定量的标准描述,应根据水陆两栖飞机的实际起飞情况在规定中完善此类要求。
(2) 在适航规定的设计与结构标准中,缺少水陆两栖飞机特有的一些机构和零件的适航评定,而此类机构和零件至关重要,若出现问题,则可能对飞行安全造成极大影响。
(3) 在适航规章的航电系统标准中,现有的规定缺少水陆两栖飞机因为其特定用途和功能所增设的仪表或电气系统和设备的标准与限制,要完善这方面的系统规定,很可能要打破目前的驾驶舱操纵面板的设计和电子设备布线模式。
此外,针对轻型水陆两栖飞机的适航要求仍存在适航验证与审定难以完成的问题,适航验证无法做到全面模拟飞机执行任务时的环境请况,如森林大火等;其余适航验证试验则可能缺少相应的试验方法或技术支持,如复合材料防腐蚀性能验证等。
猜你喜欢
中国海洋平台(2022年5期)2022-11-01 09:54:50
房地产导刊(2022年4期)2022-04-19 09:04:22
国画家(2021年4期)2021-10-13 07:32:06
课外生活(小学1-3年级)(2020年2期)2020-03-09 03:24:26
中国航海(2018年1期)2018-05-07 11:12:23
摄影之友(影像视觉)(2017年8期)2017-11-27 02:08:34
世界海运(2017年10期)2017-10-19 05:57:44
青少年科技博览(中学版)(2017年1期)2017-03-02 06:19:16
能源(2016年3期)2016-12-01 05:11:02
现代企业(2015年6期)2015-02-28 18:51:56