基于直接横摆力矩和发动机扭矩调节的汽车侧向稳定性控制
2020-04-22 10:39徐文博靳立强
科学技术与工程 2020年7期
刘 刚, 徐文博, 靳立强
(1.河南工学院汽车工程系,新乡 453000;2.吉林大学汽车仿真与控制国家重点实验室, 长春 130025)
随着中国汽车数量逐年增加,汽车主动安全技术引起了广泛的关注。2007年,美国高速公路安全管理局(NHTSA)对交通事故分析,发现装备电子稳定性控制系统(electronic stability controller, ESC)的车辆,事故碰撞率减少34%,翻车率降低71%。中国市场份额的ESC控制器基本上95%被国外公司产品占据,中国公司和研究机构针对ESC的研发起步较晚,仅占据市场份额的小部分[1-4]。
近年来中外学者多采用分层思想研究ESC控制策略和方法,该方法是采用自上而下的研究思路,将ESC控制策略分成上下两部分,上层主要由稳定性控制算法构成,下层则是负责将计算所得控制命令发送给执行单元[5-6]。在上层控制器中,研究主要集中在直接横摆力矩控制(direct yaw moment control, DYC)和发动机扭矩调节控制(engine torque control, ETC)。在直接横摆力矩方面,Van Zanten等[7]利用最优控制理论计算得到汽车转向时每个车轮所需的制动力矩;Nagai等[8]采用前馈加反馈的方法,以此计算四驱车辆所需的直接横摆力矩;Hancock等[9]利用最优LQR(linear quadratic regulator)计算直接横摆力矩,并采用差动制动方式改善车辆侧向稳定性。
除了DYC控制能够改善车辆稳定性,减小发动机扭矩输出也能起到同样的作用,因为汽车在转向时,前驱车辆易出现转向不足,后驱车辆易出现转向过度情况。通过适当的减小高速行驶车辆发动机输出扭矩,则能改变车轮的纵向受力,以此维持车辆侧向稳定性。在极限工况时利用直接横摆力矩控制配合发动机扭矩调节控制,则能有效扩大ESC维稳区域范围,但是目前关于发动机扭矩调节控制配合DYC的文献较少。Yoon等[10]提出汽车转向时侧向加速度过大,且车辆处于非线性状态时,改变汽车纵向车速则能影响汽车侧向稳定型。清华大学李亮等提出将汽车纵向车速作为控制变量,利用稳定性因数判断汽车的侧向状态,通过降低车速确保汽车稳定性[11]。
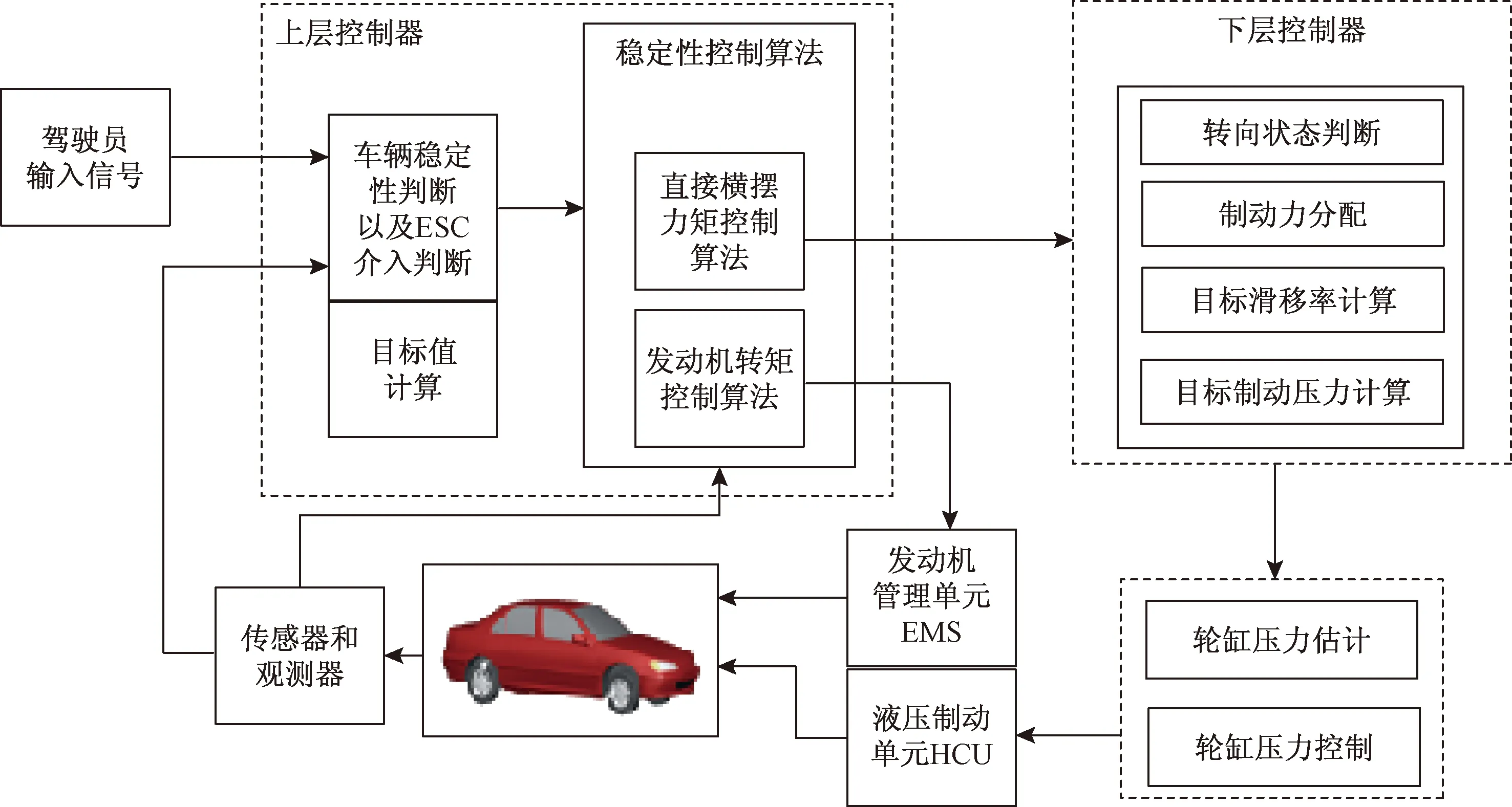
图1 车辆稳定性控制策略架构图Fig.1 Framework diagram of vehicle stability control strategy
通过上述文献分析,本文利用DYC配合ETC的方法来改善汽车侧向稳定性。
1 控制策略总体架构
车辆稳定性控制策略采用分层的思想来设计,架构如图1所示。车辆的质心侧偏角、纵向和侧向加速度、轮速等状态变量均可通过观测器估算或传感器采集得到。上层控制器主要包括三部分内容,分别为车辆稳定性状态判断、目标值计算、稳定性控制算法。上层控制器计中的DYC计算出来的直接横摆力矩发送给下层控制器,由下层控制器计算得到目标制动压力,再经过轮缸压力控制模块处理后发送给液压执行单元进行制动。ETC模块计算出来的发动机扭矩调节大小发送给发动机管理单元,由发动机管理单元执行,实现发动机扭矩调节。
2 DYC介入时机判断和ETC介入控制研究
2.1 DYC介入时机判断
(1)
式(1)中:B1和B2分别为调节变量和边界变量,利用对B1和B2变量的调节,将汽车运行状态区分为稳定状态区域、DYC介入控制区域;β为车辆质心侧偏角。由于路面附着系数会影响车辆稳定性判断,因此B1和B2取值根据路面附着系数而变化,如表1所示。如图2所示,汽车在稳定状态区域运行时,汽车的横摆角速度和质心侧偏角变化趋势紧密跟随驾驶员方向输入信号,此时DYC不会介入。但是当车辆状态参数进入图2中DYC介入控制区域时,则需要DYC介入确保车辆侧向稳定性。DYC介入时机判断流程图如图3所示。
2.2 ETC介入时机判断
汽车在转弯时,车辆的侧向加速度、纵向车速和横摆角速度的数学关系为
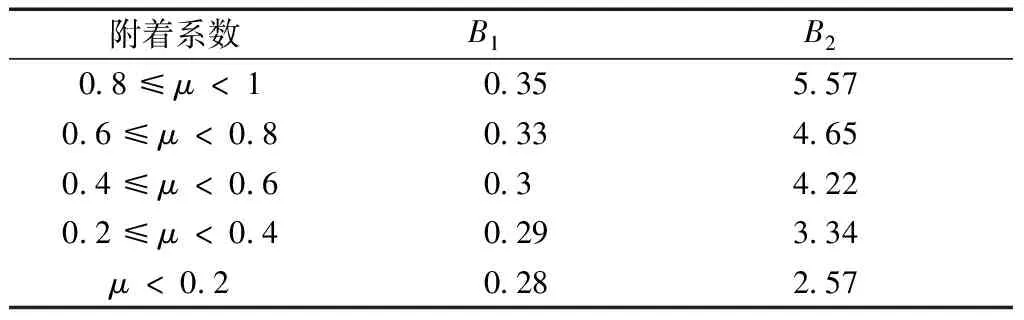
表1 B1、B2参数Table 1 Parameter of B1、B2
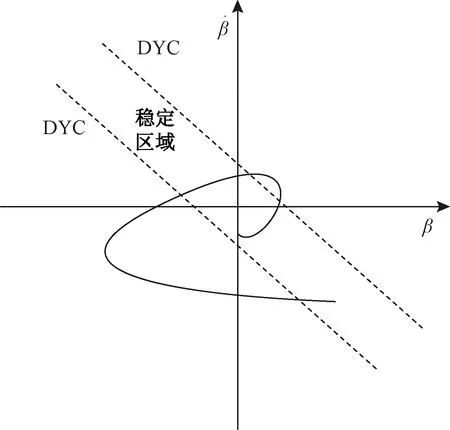
图相平面法示意图Fig.2 Phase plane method diagram

图3 DYC介入时机判断流程图Fig.3 Flow chart of DYC intervention timing judgment

(2)

(3)
路面附着力所能提供的最大侧向加速度为
ay_max=μmaxg
(4)
式(4)中:μmax表示路面附着系数的最大值,g为重力加速度。
将ay_ref与ay_max的比值作为车辆稳定性状态系数:
(5)
稳定性状态参数Kfactor表示车辆稳定性状态的程度,在已经确定路面附着系数的情况下,稳定性状态参数Kfactor增大,表示侧偏角变大,此时维持车辆稳定所需的侧向力就需要增大,侧向加速度接近或超过路面提供侧向加速度的极限值,下一时刻车辆可能会处于失稳状态;Kfactor减小,表示车辆逐渐接近稳定状态。因此,设定门限值As,当Kfactor≤As时,则意味车辆侧向稳定。针对式(5),当前路面系数一定的情况下,车辆转弯时,则可以通过减小纵向车速vx来确保车辆侧向稳定。纵向车速在车辆转弯时的门限值可以求得:
(6)
式(6)中:δlast为上一时刻前轮转角参数。
汽车在转弯过程中,纵向车速超过vx_limit,表示当前车辆行驶的路面提供的侧向力,小于维持车辆稳定所需的侧向力,车辆逐渐无法保持稳定,因此需要依靠ETC模块依据当前车辆状态参数和路面工况减少发动机扭矩的输出,以此降低车辆纵向车速,从而维持车辆侧向稳定。
3 直接横摆力矩控制算法
DYC的控制量选择横摆角速度和质心侧偏角,因为横摆角速度能够准确描述车辆转弯过程中旋转情况,质心侧偏角则反映了汽车转向过程中偏离行驶轨迹的情况,横摆角速度和质心侧偏角目标值计算由文献[12]可得。
车辆模型采用3自由度模型,该模型能够准确描述汽车在转弯过程中纵向力、侧向力和横摆力矩之间的数学关系[13],如图4所示,表达式为
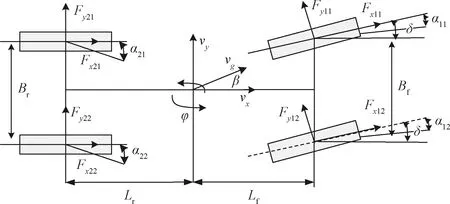
图4 3自由度非线性车辆模型Fig.4 Nonlinear vehicle model with 3 degree of freedom
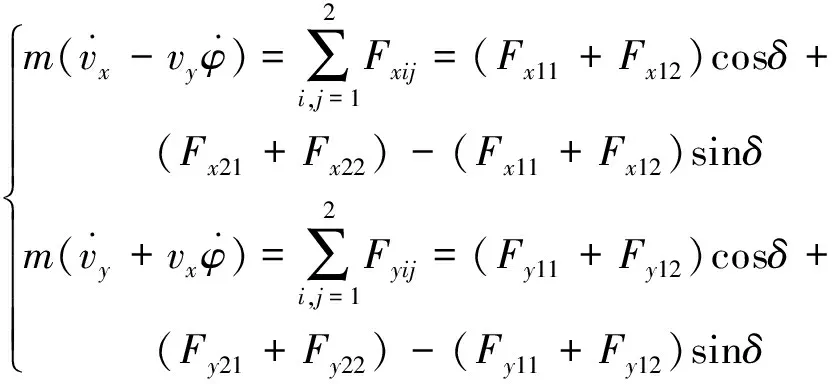
(7)
(8)
汽车的前轮侧偏角δ较小,正弦值可以认为是0,因此整理可得:
(9)
(10)
式(10)中:Myaw_des即为车辆在失稳时DYC介入维稳所需的直接横摆力矩输入值。
DYC采用指数趋近律的滑模控制算法,指数趋近律为
(11)
式(11)中:ε和ks均为消除抖动的可调节参数。
横摆角速度和质心侧偏角为DYC的控制变量,将滑模面s设置为
(12)
式(12)中:ξ为可调节参数。
针对滑模面s微分可得:
(13)
将式(10)、式(12)、式(13)整理可得车辆在极限工况下维持汽车侧向稳定性所需的直接横摆力矩为

(14)
4 发动机控制算法
发动机控制(engine torque control, ETC)是基于车辆微控制器已经具备驱动防滑控制(TCS)情况下的。ETC介入时会根据工况计算得到发动机扭矩调节数值,控制器将数值通过CAN总线传送给发动机管理系统(engine management system,EMS)。EMS根据接收到的发动机扭矩调节数值做出相应调整。发动机控制架构如图5所示,发动机输出扭矩的数学表达式为
Te=Tbase-ΔTωe-Tfast
(15)
式(15)中:Tbase是发动机输出扭矩的基础值,主要利用节气门开度参数与发动机转速参数,通过查询MAP图得到;Tfast为ETC介入后计算得到的发动机减少扭矩目标值;ΔTωe为发动机扭矩修正参数,数学模型为
(16)
4.1 变参数PID发动机扭矩调节算法
ETC算法选取汽车车轮的轮速作为控制变量,因为轮速和滑移率构成数学关系,且轮速能够利用轮速传感器采集得到。轮速作为控制变量,其目标值为
(17)
式(17)中:λnom=f(λp)KTCS_flag+λcorr;vref是车辆的参考车速;KTCS_flag为驱动防滑控制标志位,当车轮滑转率超过TCS门限值时置1,未超过则置0;λcorr为ETC介入时滑移率的修正参数,该值计算是ETC算法的关键,在4.2节介绍;f(λp)是TCS介入时车轮在当前行驶工况下的最佳滑转率,f(λp)计算可以参考文献[14-15]。
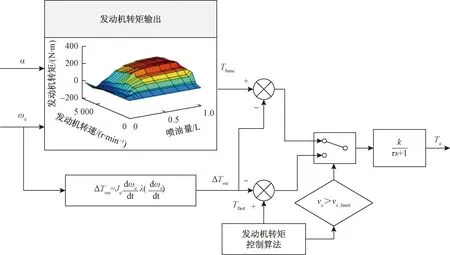
图5 发动机转矩控制架构图Fig.5 Engine torque control architecture
ETC采用可变参数的PID控制算法,算法公式为
(18)
式(18)中:vT是驱动轴同轴两个车轮轮速的平均值vT=(vl+vr)/2。ETC变参数PID算法中的KP、KI、KD主要是依据Δv以及当前路面的附着系数改变,参数的改变保证了在高附着路面行驶时汽车具备强劲的驱动能力,并且改善在低附着冰雪路面行驶时的舒适度,三个参数取值范围如表2所示,μcorr取值范围如图6所示。
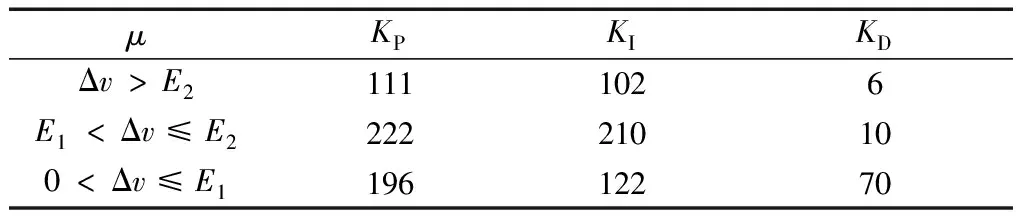
表2 变参数PID参数Table 2 Variable parameter PID parameter
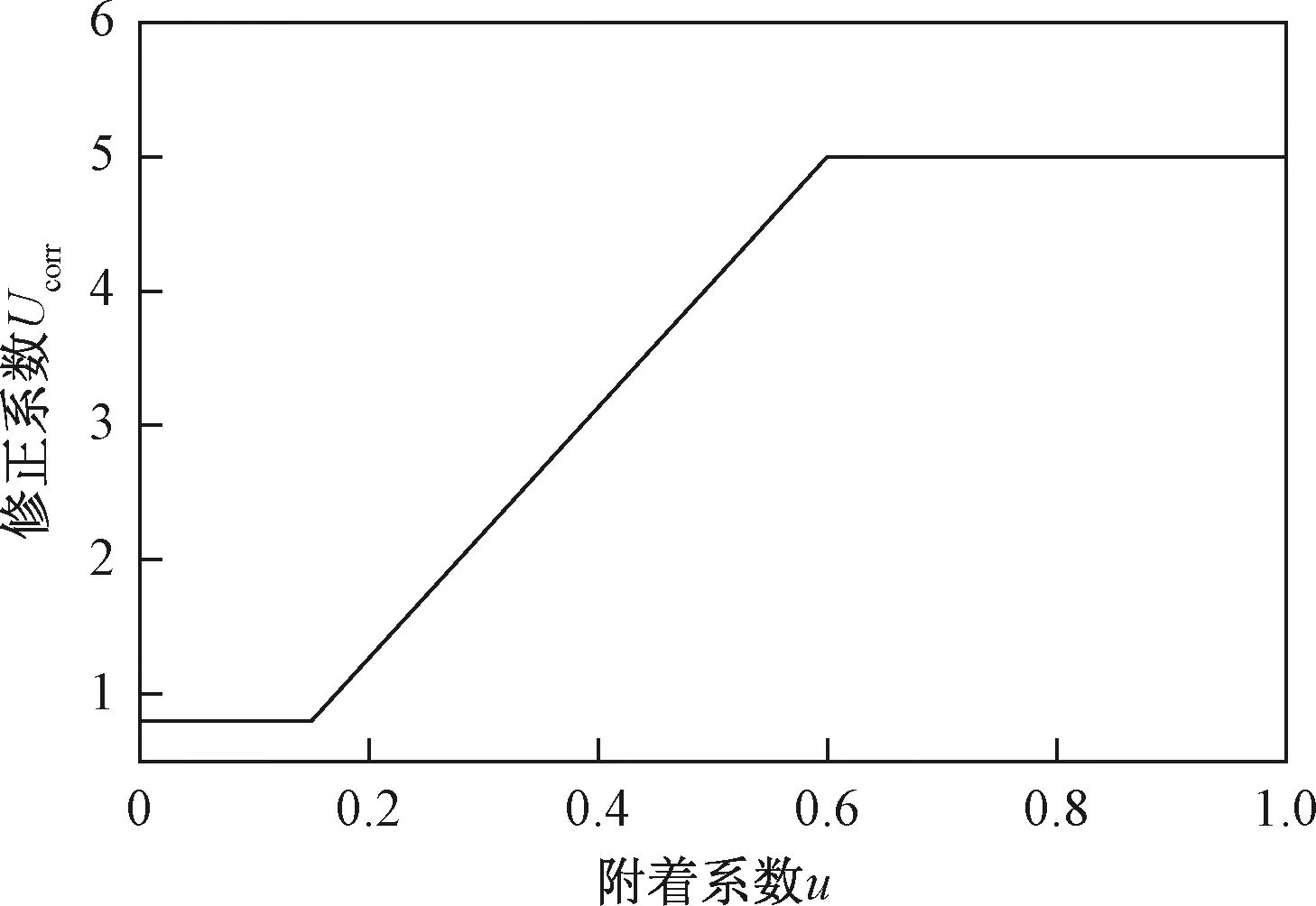
图6 路面附着系数与滑移率修正值关系Fig.6 The relationship between pavement adhesion coefficient and slip correction value
4.2 发动机扭矩调节的期望值计算
汽车在转向过程中,发动机扭矩调节滑移率期望值的修正量由模糊算法计算得到。基于模糊算法的滑移率修正值算法架构如图7所示。
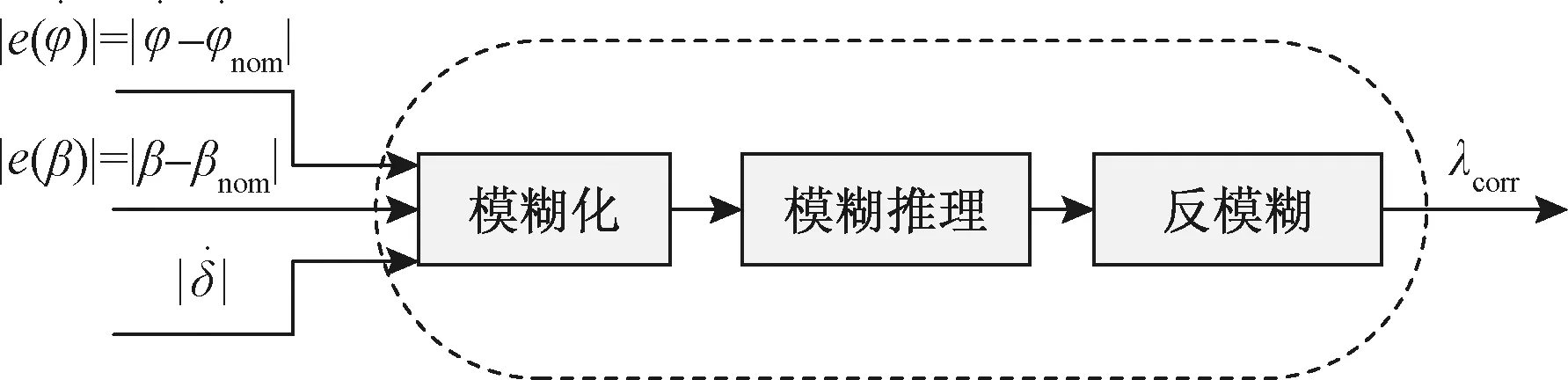
图7 滑移率修正值的模糊算法架构Fig.7 Fuzzy algorithm architecture of slip rate correction value
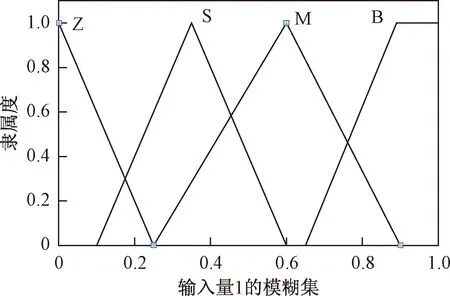
图8 输入量1的模糊集Fig.8 Fuzzy set of input 1
第二个输入变量是|e(β)|=|β-βnom|,其论域设置为[0,1],0表示汽车处于稳态,1表示汽车转向过程中偏离期望轨迹程度很大。输入变量2的模糊集如图9所示。
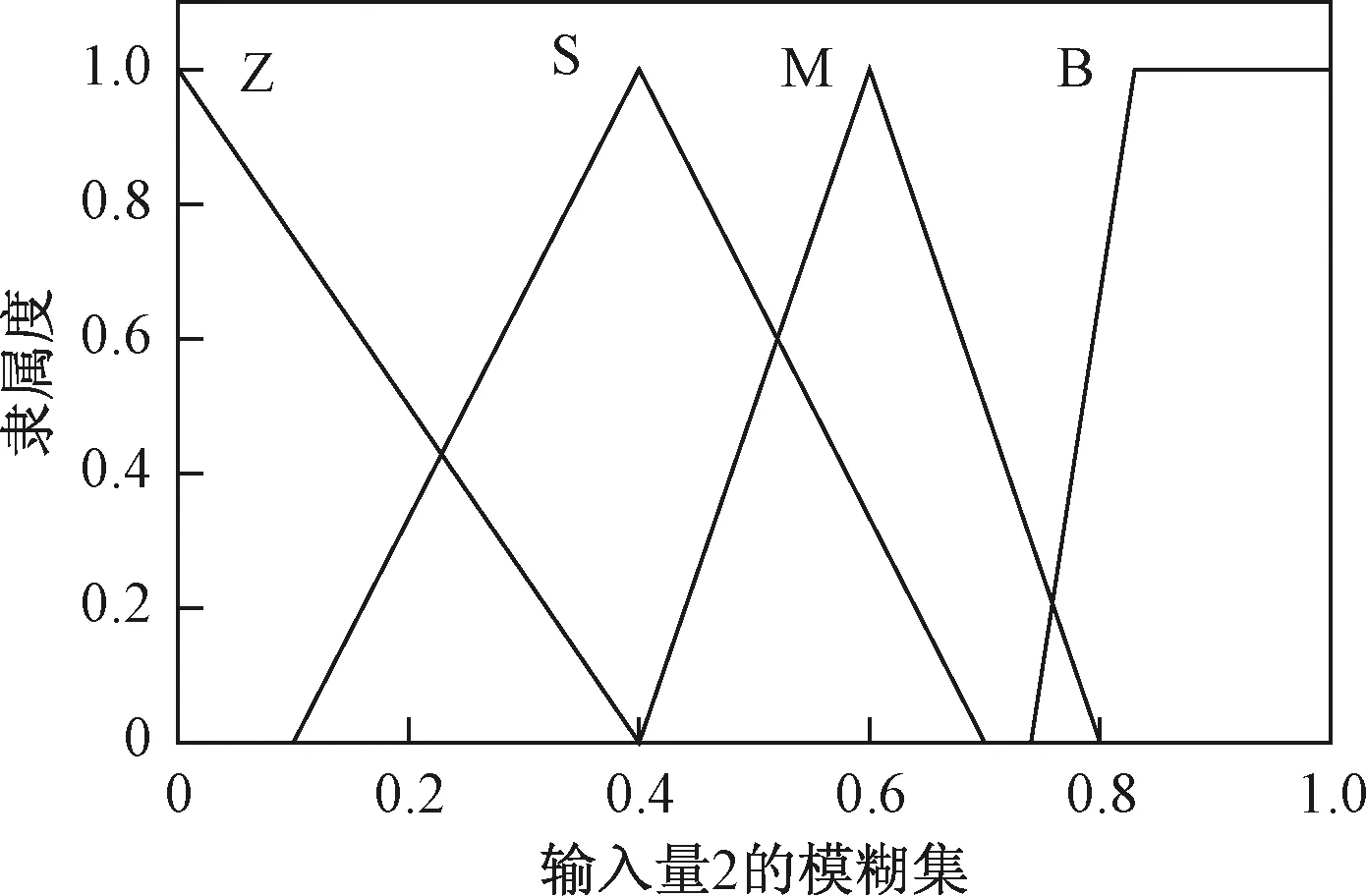
图9 输入量2的模糊集Fig.9 Fuzzy sets of input 2
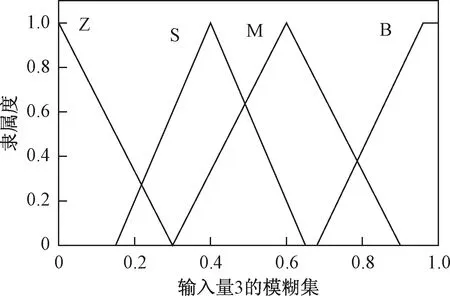
图10 输入量3的模糊集Fig.10 Fuzzy set of input 3
输出量为目标滑移率修正值λcorr,其论域设置[0,1],用来表示发动机扭矩介入时减小扭矩输出的修正量,模糊子集如图11所示。

图11 输出量的模糊集Fig.11 Fuzzy sets of output
5 软件联仿
利用MATLAB/Simulink、Carsim和Lab AMESim软件联合构建了仿真平台,联合仿真平台方案如图12所示。直接横摆力矩和发动机扭矩调节控制算法采用MATLAB/Simulink建模构建,轮缸压力控制和轮缸压力估计模块参考文献[16]。液压控制单元采用LAB AMESim软件构建。在算法仿真验证部分,分别进行了符合FMVSS126法规的正弦迟滞实验和方向盘增幅实验。车辆参数如表3所示。
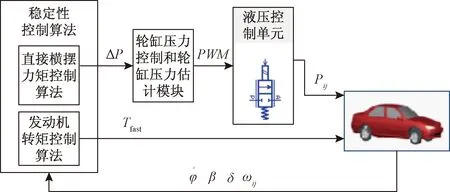
图12 稳定性控制软件联合仿真验证方案Fig.12 Co-simulation and verification scheme of stability control software
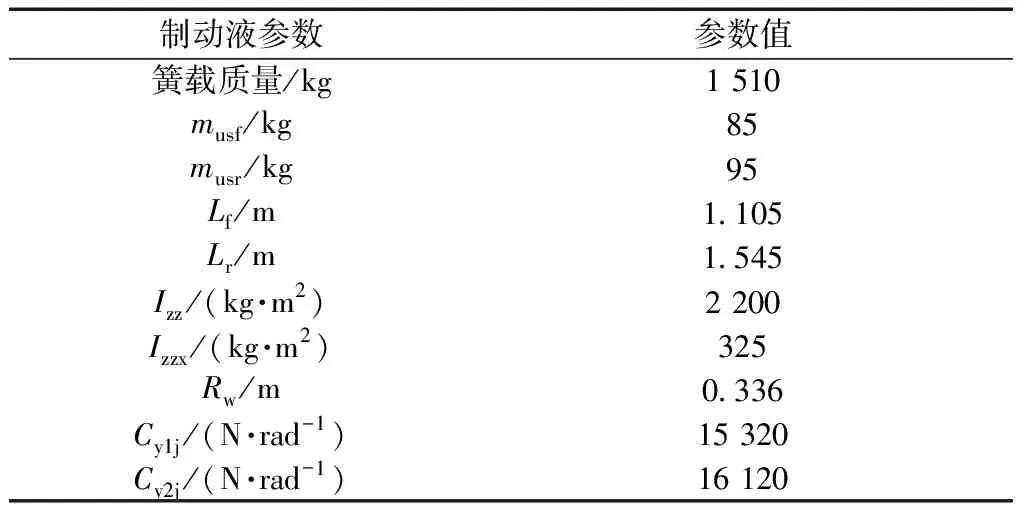
表3 软件联合仿真车辆参数Table 3 Software co-simulation of vehicle parameters
5.1 正弦迟滞仿真实验

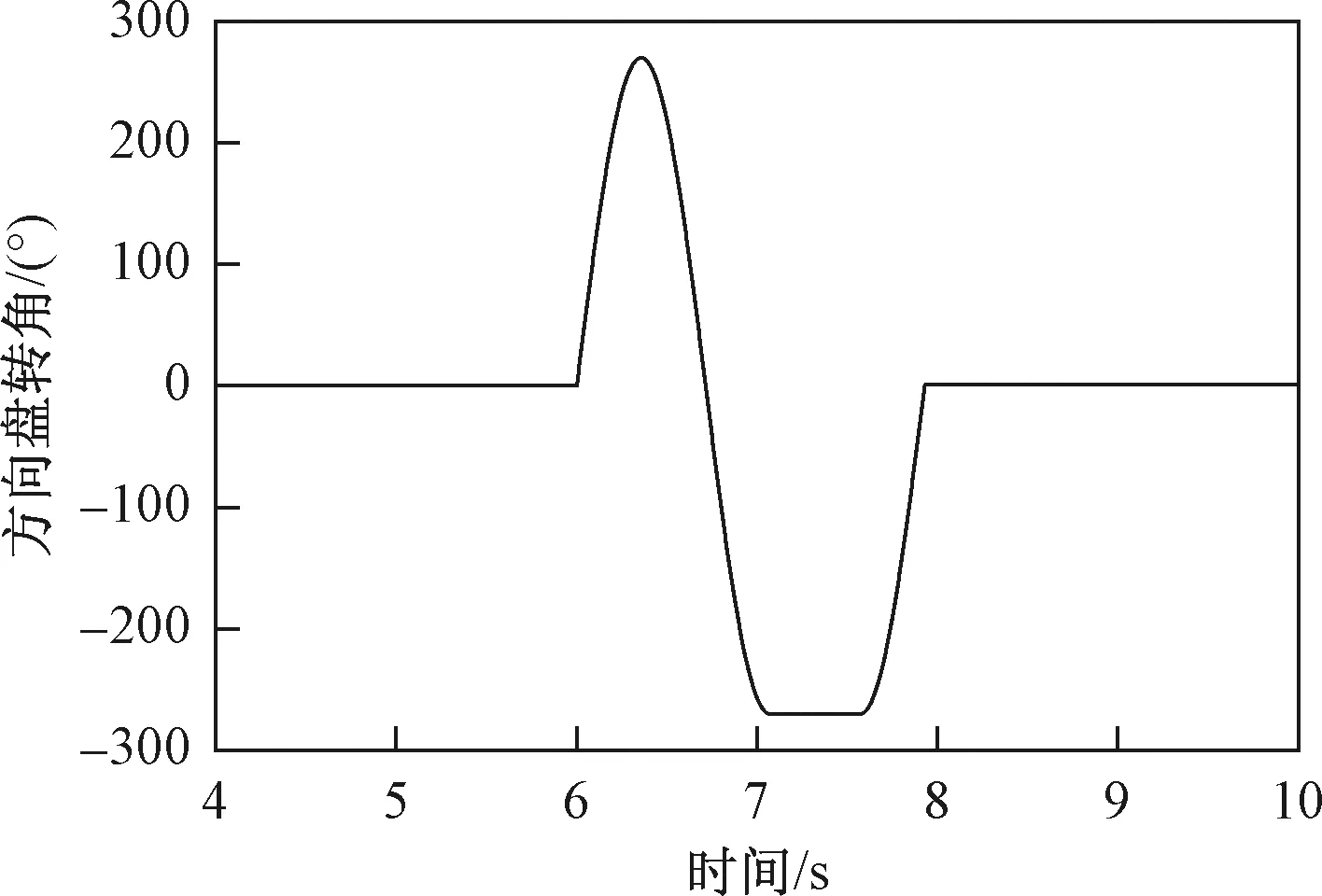
图13 正弦迟滞工况下方向盘输入信号Fig.13 Steering wheel input signal under sinusoidal hysteresis condition
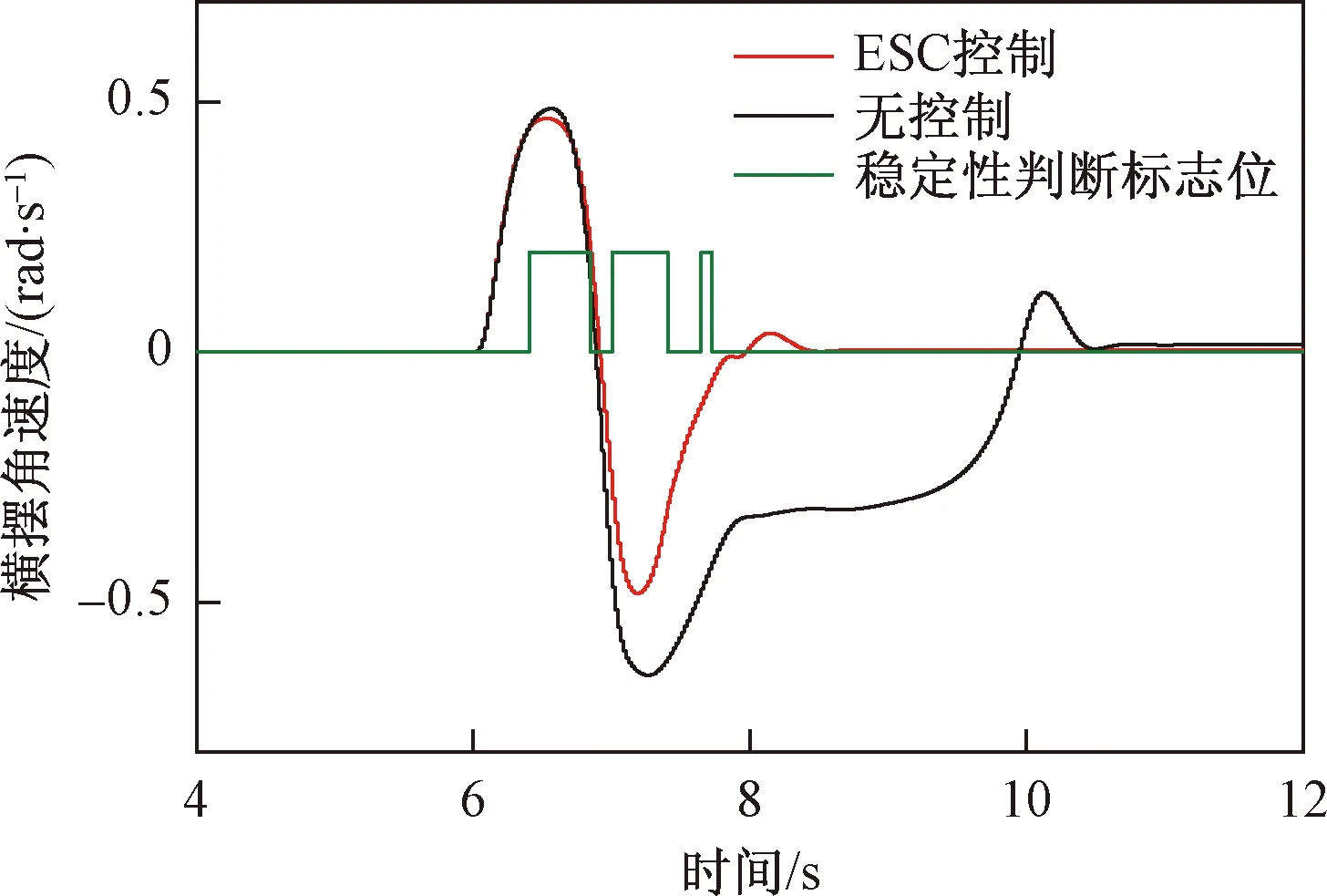
图14 正弦迟滞工况下横摆角速度数据Fig.14 Yaw angular velocity data under sinusoidal hysteresis

图15 正弦迟滞工况下侧向加速度Fig.15 Lateral acceleration under sinusoidal hysteresis

图16 正弦迟滞工况下相平面Fig.16 Phase plan under sinusoidal hysteresis
5.2 方向盘转角输入增幅仿真验证
方向盘转角输入增幅实验是在高速情况下,依靠方向盘转角逐渐增加来验证车辆是否能够保证侧向稳定,方向盘转角输入数值如图17所示,车辆速度为90 km/h,路面设置为低附路面,附着系数为0.3。与正弦迟滞实验不同,车辆在实验全程保持匀速,所以驾驶员模型需要控制燃油供给,该工况主要是为了验证直接横摆力矩和发动机扭矩调节协调配合控制的效果。

图17 方向盘转角输入信号数据Fig.17 Steering wheel angle input signal data

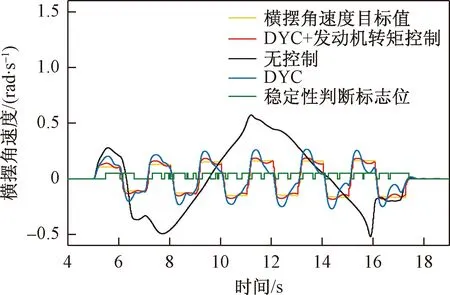
图18 低附路面工况横摆角速度曲线Fig.18 Yaw angular velocity curve under lower surface conditions
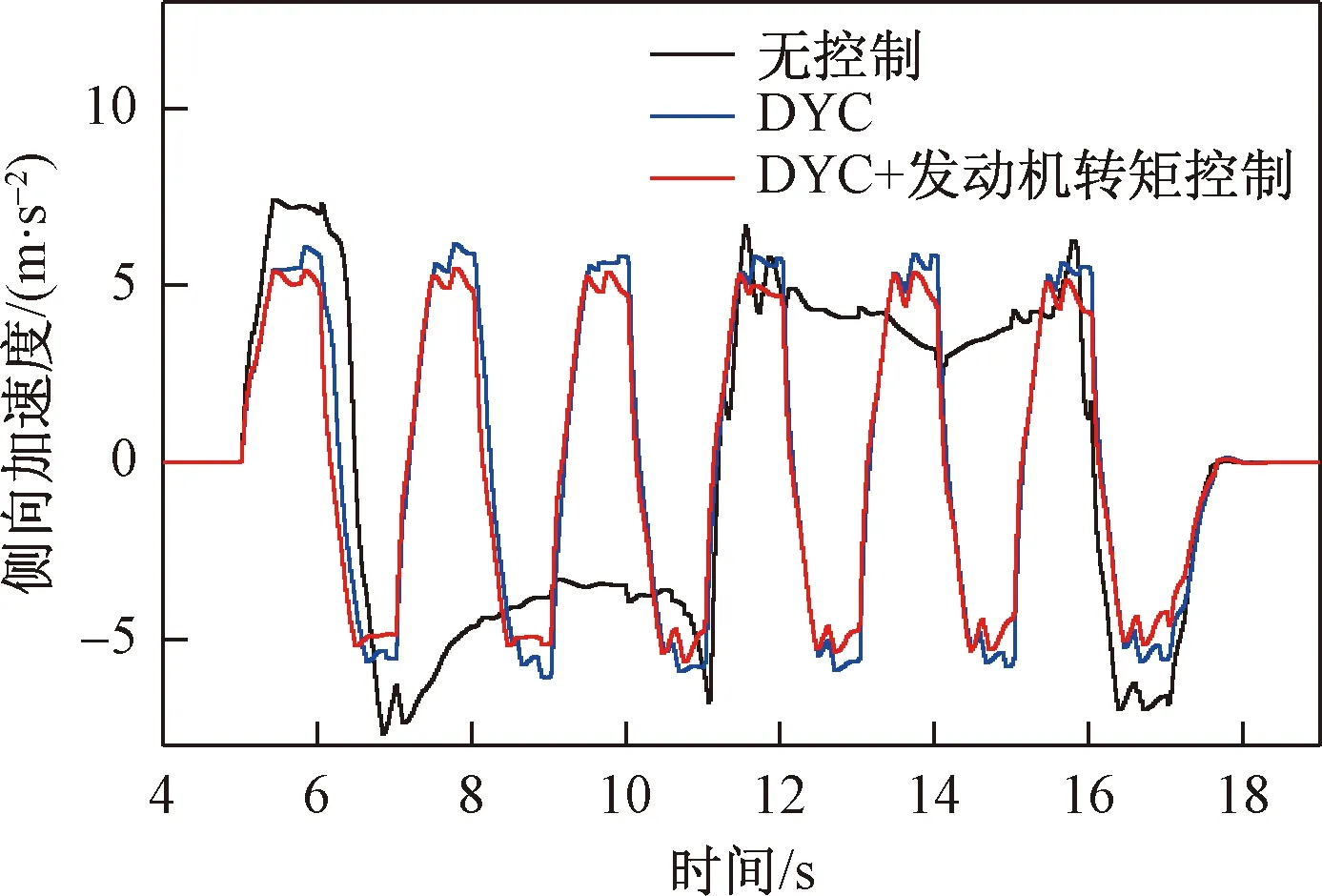
图19 低附路面工况侧向加速度曲线Fig.19 Lateral acceleration curve of low attached pavement working conditions
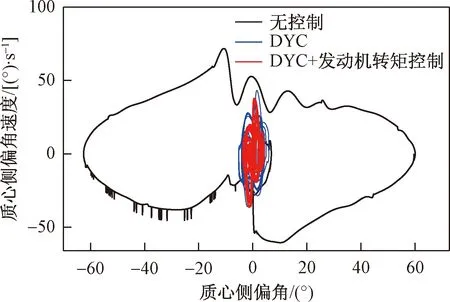
图20 低附路面工况相平面Fig.20 Phase plan of low-attached pavement working conditions
6 实验验证
实验车辆选择上汽乘用车的名爵锐腾,除了车身自带的方向盘转角传感器、横摆角速度组合传感器以外,增加了SpeedBox测试仪、并且安装了防滚架。车辆改装以及内部设备布置如图21所示。实车实验在安徽广德通用-泛亚试车场进行,路面为附着系数0.9的高附着路面,主要进行了符合ISO-3888-1标准的双移线工况实验。车辆初始速度保持在75 km/h,全程匀速驾驶。实验分为关闭ESC控制器效果验证和开启ESC控制器效果验证。

图21 车辆改装以及内部设备图Fig.21 Vehicle refitting and internal equipment diagram
图22所示为无ESC控制前轮转角和侧向加速度数据。从图22侧向加速度在4.02 s时达到最大值8.51 m/s2,且侧向加速度、横摆角速度没有密切跟随前轮转角变化趋势,出现较长时间的响应滞后现象,说明汽车行驶状态和轨迹已经与驾驶员操作出现偏差,此时汽车已经失稳。无ESC控制的双移线工况实验做了10次,均出现了汽车撞桩现象。
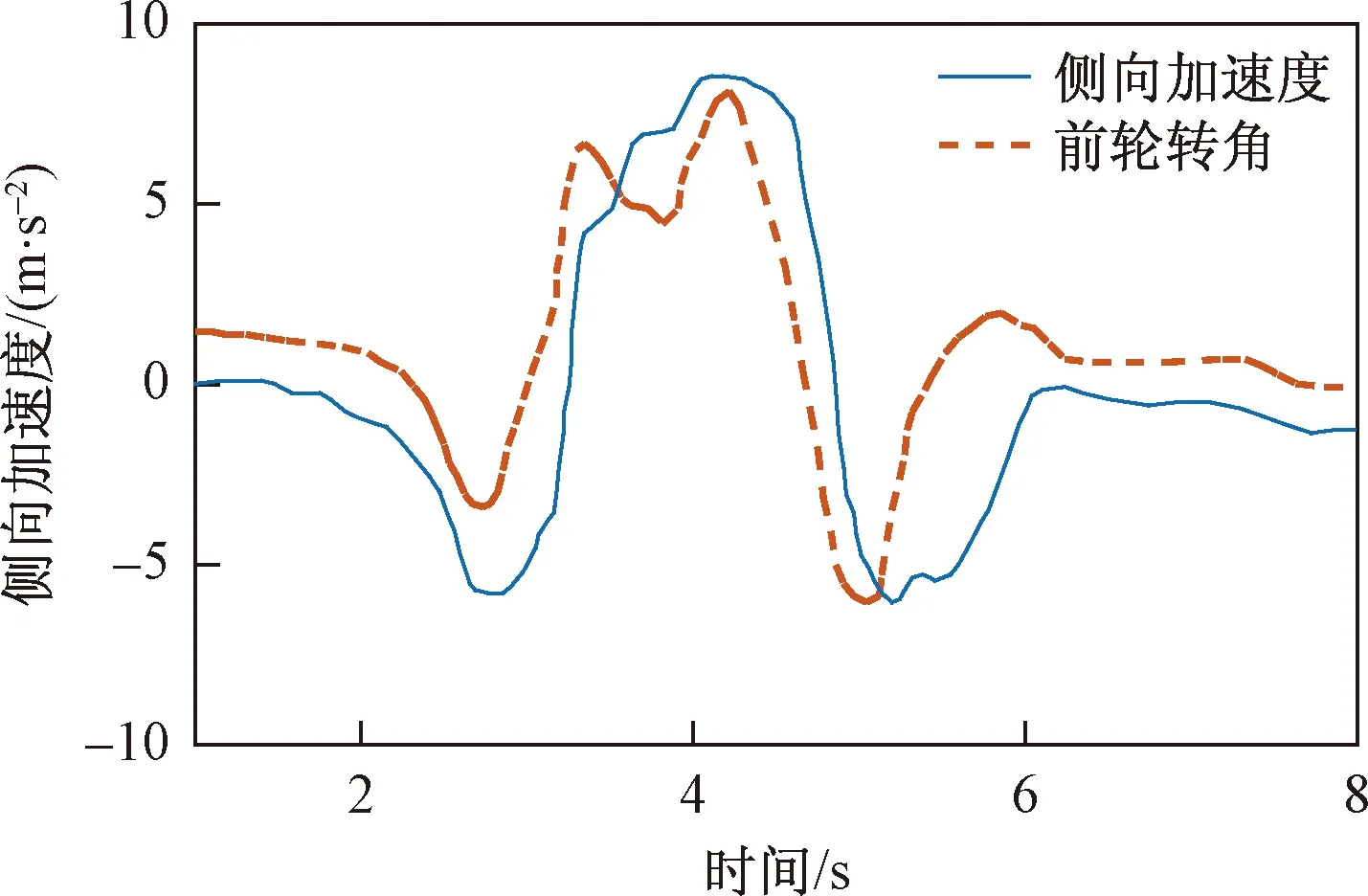
图22 无控制高附双移线工况车辆侧向加速度和前轮转角曲线Fig.22 Vehicle lateral acceleration and front wheel rotation curve under uncontrolled high-attachment double lane-shifting condition
在打开ESC控制器的情况下,图23所示为前轮转角和侧向加速度数据。从图23可以看出,ESC控制在4.89、5.71、7.21 s时介入改善车辆稳定状态,横摆角速度和侧向加速度变化趋势基本与前轮转角一致。
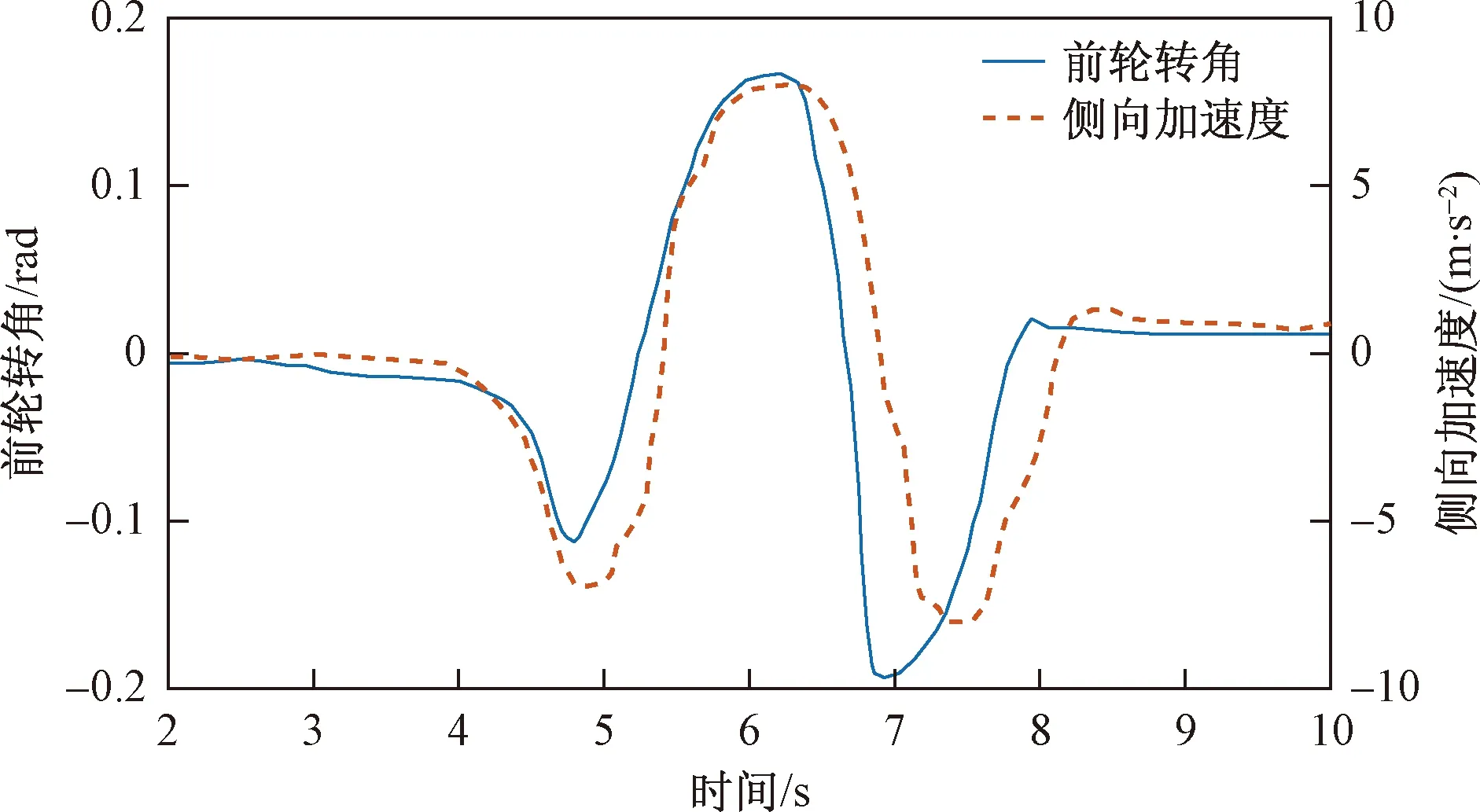
图23 有控制高附双移线工况车辆侧向加速度和前轮转角曲线Fig.23 Shows the lateral acceleration and front wheel angle curves under the condition of high attachment and double lane shifting
图24所示为发动机时机输出扭矩和驾驶员期望输出扭矩曲线,在5.62~6.32 s、7.21~7.52 s两个时间段,车辆纵向车速大于门限值,ETC控制介入减小发动机输出扭矩,所以从图24中可以看出在这两个时间段发动机实际输出扭矩小于期望扭矩。
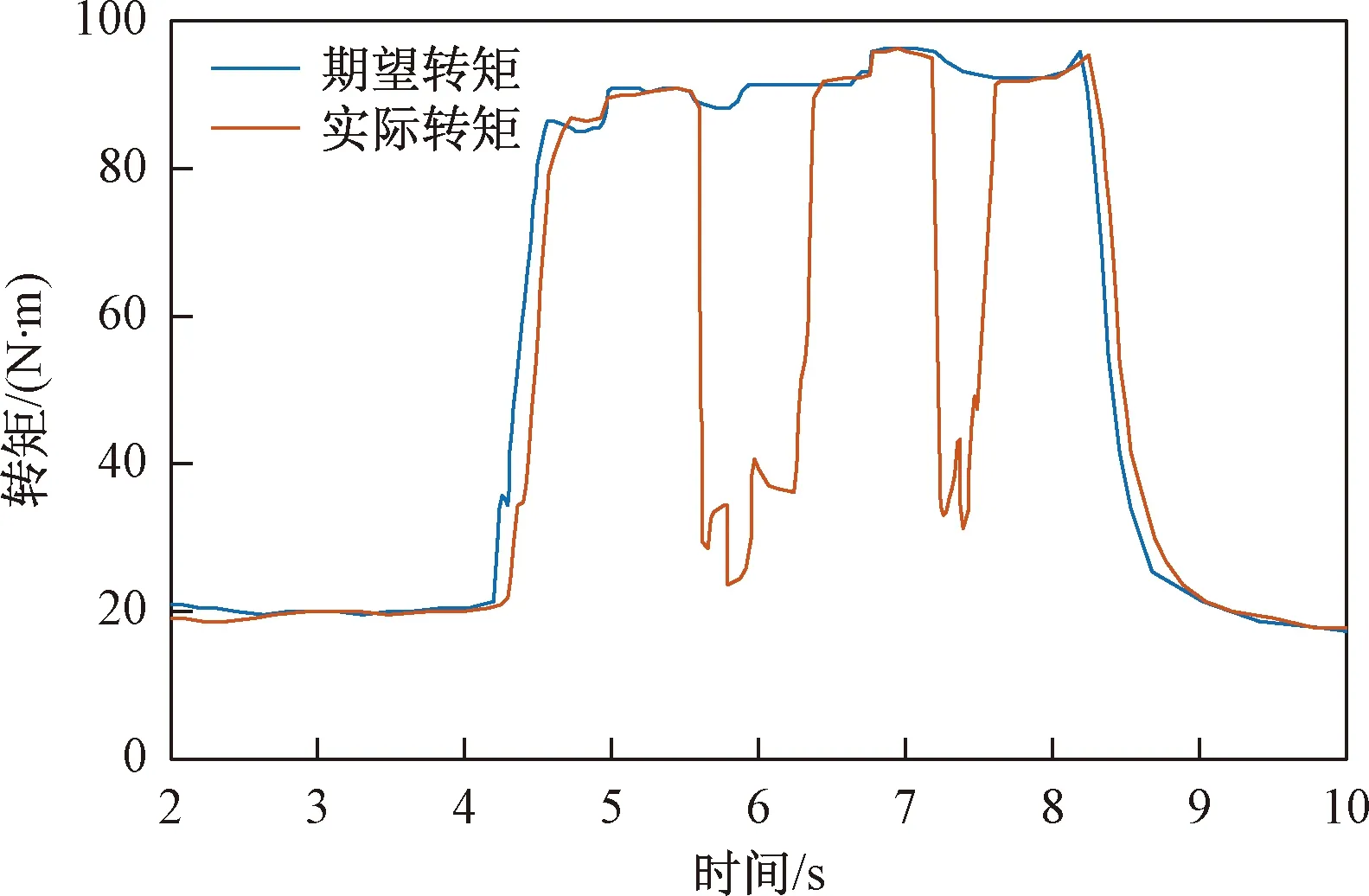
图24 高附双移线工况发动机扭矩输出曲线Fig.24 Torque output curve of engine under high attachment and double line shift conditions
7 结论
猜你喜欢
中国特种设备安全(2022年2期)2022-07-08
军民两用技术与产品(2022年2期)2022-06-01
汽车实用技术(2022年2期)2022-02-21
北京航空航天大学学报(2021年4期)2021-11-24
商品与质量(2020年41期)2020-11-09
北京汽车(2018年5期)2018-11-07
山东青年(2016年12期)2017-03-02
航天制造技术(2016年6期)2016-05-09
探测与控制学报(2015年4期)2015-12-15
汽车文摘(2015年11期)2015-12-02