基于分布式光纤传感技术的封闭空间火源精确定位方法研究
2020-04-14 10:40杨汉瑞张经纬张智鑫
东北电力大学学报 2020年1期
杨汉瑞,栾 宁,张经纬,张智鑫
(东北电力大学自动化工程学院,吉林 吉林 132012)
火灾是各种自然与社会灾害中发生概率最高的一种危害,给人类乃至生命安全构成了严重的威胁.为了减少火灾的危害,能够及时发现火源并有效灭火的自动灭火技术成为了火灾探测研究领域的一个重要方向.常见的空间灭火系统大多采用淋喷的方式对监测区域进行保护,此方法可以对监测区域进行灭火,但不是针对火源位置进行集中灭火,存在水资源浪费、灭火效率低的问题,而且对于博物馆、机房等特殊区域也容易对无火区域的物品造成损害,因此各国学者对能够精准确定火源位置的火源定位技术开展了深刻的研究.目前火灾监测主要是烟气传感技术、图像型火灾探测技术、温度传感器组网技术对火源进行定位.物体燃烧时会产生大量的标志性气体(如CO气体等),可以利用烟气传感器进行火灾报警,或利用敏感元件铂遇到可燃性气体时发生氧化反应并改变电阻的特性制成气体传感器进行火灾预警[1],Allan Melvin Andrew等通过烟气传感器对不同火源和建筑材料在早期发出的气体进行数据采集,对采集数据进行归一化特征提取并建立了分类模型,该模型方法可用于早期火灾探测和预测[2],但烟气传感器具有高误报率及耐腐蚀差的明显缺点[3].图像型火灾探测技术利用摄像机或照相机对空间进行图像监测,通过数字图像处理算法对现场图像进行处理和相关分析从而获得火源的位置及强度等相关信息[4],Nurul Shakira Bakri等采用彩色像素分类.利用RGB和YCbCr彩色模型,在给定条件下将火灾图像从背景中分离出来,并将亮度和色度从原始图像中分离出来进行火灾探测.平均火灾检出率为90%[5],T Celik等研制了一种结合颜色信息和背景场景的实时火灾探测器,可对室内及森林火灾进行监测定位[6],但图像型火灾定位探测系统多用于开放的大空间中火源的空间定位,且价格高昂,更主要的是其类似于监视器的作用不适宜在私密性场所或不希望受到外界注视的场合下使用.由于火灾发生时,温度会剧烈升高,所以可通过温度传感器阵列来推测火源的位置,Thomas Kaiser等发表了基于温度传感器阵列的火灾探测方法,分析了火灾初期温度场的情况和热气流的流动特点,给出用温度传感器阵列进行火灾定位的前提条件,用相关法完成阵列信号时延估计,并在远场中实现火源定位的计算[7].王殊等也提出使用温度传感器阵列的方式进行火源定位[8],但当火源与传感器阵列相隔较远时,火源定位的准确度大大降低.另外,当需要对大范围的空间进行火源预警和定位时,采用上述方法需要使用多个传感器阵列,存在成本较高、安装困难等问题.
基于拉曼散射效应和光时域反射技术(OTDR)的分布式拉曼测温(DTS)系统可以进行实时连续温度测量,具有高精度、长距离监测、容易布线,适用于大范围的空间温度场测量、抗电磁干扰等优点[9-12].若使用DTS系统进行火源定位,可以在火灾早期对火源位置进行准确定位进而实现高效灭火,对于减少经济损失、避免人员伤亡有非常重要的意义.为此本基于分布式拉曼测温系统提出了火源粗略定位及精确定位方法.
1 理 论
1.1 基于拉曼散射的分布式光纤测温原理
分布式拉曼测温(DTS)系统基本组成如图1所示,主要包括:泵浦光源、粗波分复用器、光电探测器、放大器、传感光纤、高速采集卡、上位机监测平台组成.泵浦光源发出脉冲光,通过粗波分复用器的1 550 nm端口进入传感光纤,传感光纤在监测区域产生后向拉曼散射光,其中后向拉曼散射光中载有温度信号的斯托克斯散射光和反斯托克斯散射光通过粗波分复用器的1 450 nm及1 660 nm端口进入光电探测器[13-15],进行光电信号转换及放大,最后被高速采集卡采集,并在上位机监测平台上将采集到的光强数据进行解调.

图1 系统组成图
1.2 反斯托克斯解调理论
本部分理论主要分析介绍了的反斯托克斯解调方法和光时域反射技术,为火源的定位提供理论基础.因为反斯托克斯散射光对温度信息更加敏感,所以选用反斯托克斯散射光进行解调,并对获得的反思托克斯散射光强值进行累加平均,用于去除光功率波动白噪声.
泵浦光源发出的脉冲光的峰值功率为P0,脉冲光在传感光纤的L处产生反斯托克斯光,其光功率为[20-21]
(1)
公式中:Vas为反思托克斯光在光纤中传播的频率;Kas为与反斯托克斯光散射有关的系数;L为传感光纤发生拉曼散射的位置;α0、αas为入射光及反斯托克斯光的衰减系数;Ras(T)为反思托克斯光的玻尔兹曼因子.
由光时域反射原理可知,产生拉曼散射的位置L可表示为
L=Vat/2,
(2)
公式中:Va为频率为a的脉冲光在传感光纤中传播的速度;t为光电探测器检测到拉曼散射光的时间.
在DTS系统中,系统的空间分辨率是由脉冲光源的脉冲宽度、光电探测器的放大电路带宽、采集卡的采样频率共同决定的、如今泵浦光源发出打脉冲宽度可以达到飞秒级别,采集卡的采样频率也能达到几百兆,所以实际限制系统空间分辨率的主要因素为光电探测器的放大电路带宽不足,若要提高系统的空间分辨率,就必须提高带宽,然而带宽的增加又会使系统的温度分辨率降低,因此在确定了系统的以上参数后,在传感光纤的感温区域未达到系统的空间分辨率时,系统的反斯托克斯光强值及温度的响应值达不到光强及温度幅值[16].
1.3 封闭空间火源温度场分析
基于DTS系统实现火源位置定位,首先要对封闭受限空间内的火灾发展过程进行研究和分析,根据其特点来设计传感光纤的敷设和定位方法.在受限空间内,一般情况下建筑物内火灾初起时火源强度较低,与起火空间尺度相比可以认为是点火源,这种常见的受限空间的点火源的发展通常都要经历三个阶段:早期阴燃、火焰和放热、最后随着物质的耗尽而衰减熄灭,当火灾迅速发展时,产生大量的热、烟和火焰辐射,由于烟雾和燃烧所释放的气体比周围空气热,因而形成上升气流.随着气流的增大而开始具有浮力并形成空气对流,这就是所谓的浮力旋流,通常称为烟气羽流,烟气羽流到达房间顶部后会形成水平运动的热气层[17].如图2所示.
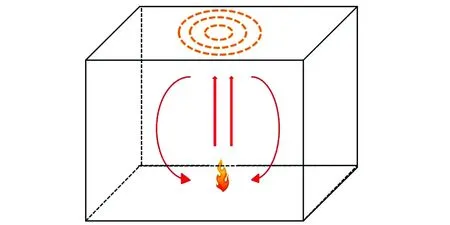
图2 封闭受限空间火源燃烧示意图
由于上升到密闭空间的顶板的热气流是以火源为中心向四周扩散的,在扩散的过程中容易受到顶板不平整、周围墙壁温度不一致等环境的影响,使热气流向四周扩散的温度波前并不是规则的圆形,为了简化分析模型,对火源定位的边界条件进行了假设:
(1) 封闭空间的顶部平坦并且顶部的热传导率较低,避免温度流失过快,温度波前形状不规则,不利于DTS系统的快速降温测量;
(2) 在火灾早期,封闭空间四周墙壁的温度是相同的,保证DTS系统测量的温度由火源燃烧产生;
(3) 着火初期,热气流扩散的速度是一致的;
(4) 燃烧没有通过暖气片、空调等对热气流有影响的设备;
(5) 燃烧点不在墙的附近,避免上升的热气流受墙壁的阻挡.
基于以上假设[18],热气流可以看作以规则的圆形温度波前向四周扩散,火源位于温度波前的圆心位置的正下方,确定了向四周扩散的热气流的中心点就可以得到火源的二维位置坐标.这样就将火源位置定位问题简化为热气流圆形波前圆心的求解问题[19-21].
2 火源定位模型
本部分首先对封闭空间顶部监测区域进行网格划分及传感光纤布阵,并据此建立一个通过区域监测光强值来粗略定位出火源所处的网格序号的定位模型,然后再根据火源所处网格区域内部的拉曼散射光强比来算出火源的精确位置坐标,从而实现对封闭空间火源的精确定位.
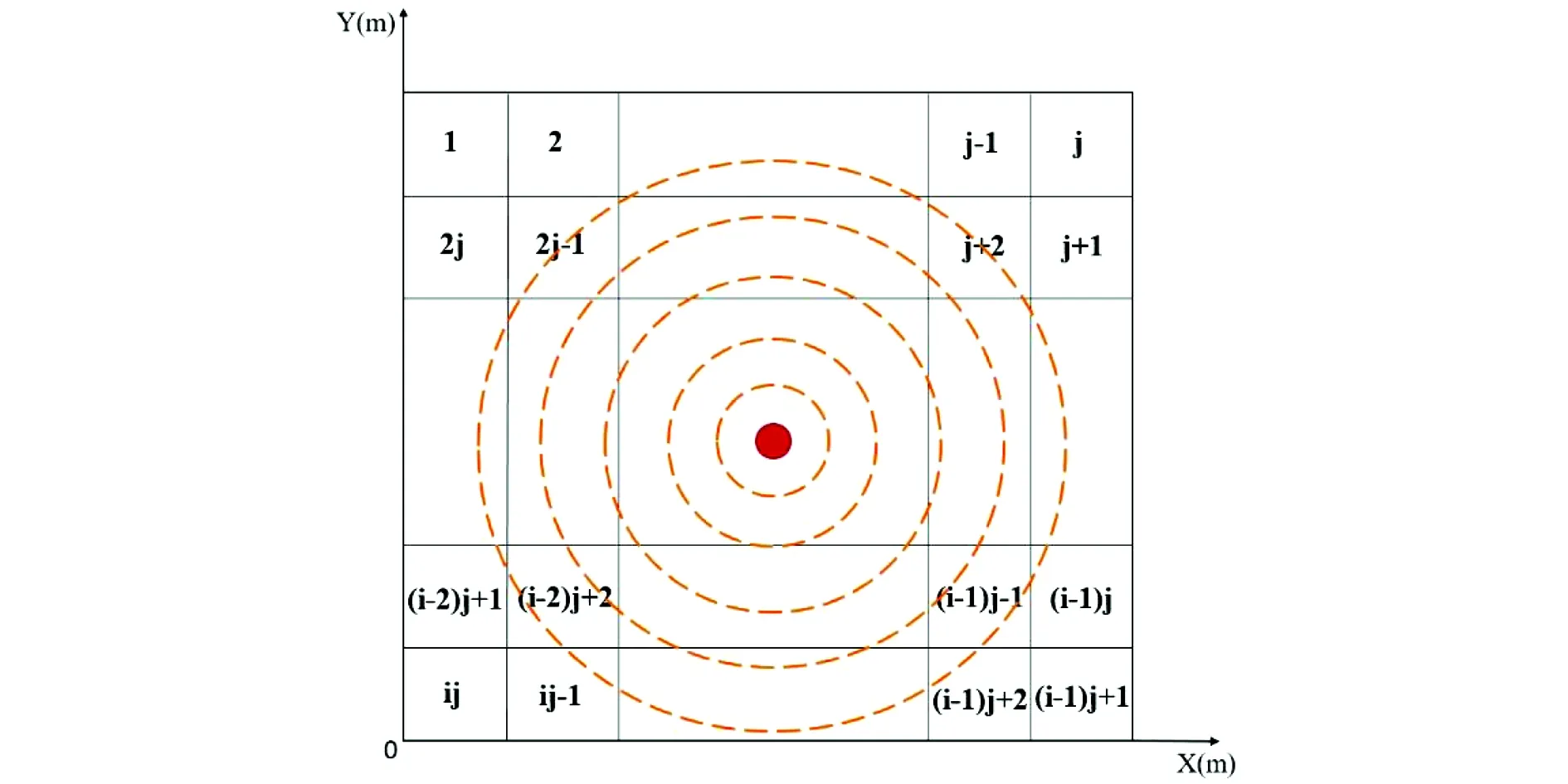
图3 封闭受限空间火源燃烧俯视图
2.1 火源中心的粗略定位模型
二维火源定位几何模型如图3所示,该图为图2的俯视图,将被测区域划分为i×j个小区域并建立起直角坐标系.其中每一个圆环代表具有相同温度的波前,火源位于波前的圆心位置,波前的半径越大,代表波前上的点距离火源越远,温度越低.因此在空间顶部不同波前位置的温度是不一致的,结合温度传感器与火源的距离,可以确定火源的位置.

图4 粗略定位原理图
传感光纤在每一个小区域内以内切圆的形式进行布阵,如图4所示.并在相邻的加热段传感光纤环(如图中红色光纤环所示)之间引出固定长度的传感光纤(如图中黑色光纤环所示),用于每个小区域的区分标定.结合温度波前的分布规律,必定会有至多四个顶点相交的小区域内部的四段传感光纤的温度明显大于其他小区域内部传感光纤温度,找到监测光强值中的四个最大值,结合OTDR技术及网格划分可以得到火源中心所处的小区域标号,四个顶点相交的标号区域的中心可视为火源中心坐标.
粗略定位模型计算公式为
aσ=xσ%j,
(3)
amin=min(aσ),
(4)
bσ=xσ-(amin+1)j,
(5)
(6)
公式中:a为小区域内的加热段传感光纤环长度,m;b为小区域间引出的区分段光纤长度,m;σ∈[1,4],xσ为传感光纤发生拉曼散射的位置,m.
火源中心的位置(X,Y)为
X=bminc/π,
(7)
Y=c(i-amin-1)/π,
(8)
公式中:c为小区域内的传感光纤长度,m.

图5 加热区等效示意图
2.2 火源中心精确定位模型
在粗略定位的基础上,已经将火源中心位置范围由整个二维被测平面缩小到了由四个顶点相交的小区域组成的新区域.实验数据表明,监测区域热气流的内层温度波前温度差值很小且温度远高于其他波前温度场可近似等效于一个温度均匀的圆形加热区,其中蓝色圆环为传感光纤环,黄色圆形为等效加热区,由于等效加热区外侧的少部分低温温度波前仍会对传感光纤环有低温加热,为了对此部分进行温度补偿,将等效加热区变为以黄色圆环为内切圆的一个矩形加热区,如图5所示.
因为火源中心的位置的不同,四个小区域内被加热的传感光纤的长度也是各不相同的.在DTS系统中,系统的空间分辨率是由脉冲光源的脉冲宽度、光电探测器的放大电路带宽、采集卡的采样频率共同决定的.如今泵浦光源发出打脉冲宽度可以达到飞秒级别,采集卡的采样频率也能达到几百兆,所以实际限制系统空间分辨率的主要因素为光电探测器的放大电路带宽不足,这会导致传感光纤的感温区域未达到系统的空间分辨率时,系统的光强比值及温度的响应值达不到光强比及温度幅值.大量数据分析表明空间分辨率以内的响应曲线近似高斯分布,因此可根据新区域内部四段传感光纤的光强比值确定四个小区域各自被加热的传感光纤长度,进而可确定火源中心在新区域内部的精确位置.
为建立反斯托克斯光强值与传感光纤加热长度在各温度情况下的对应关系,在温度精度为0.1 ℃的恒温水浴箱内,对小于系统空间分辨率长度的光纤进行加热,并在40 ℃~80 ℃的温度区间内以2 ℃为间隔进行高斯拟合.各温度下的拟合曲线,如图6所示.
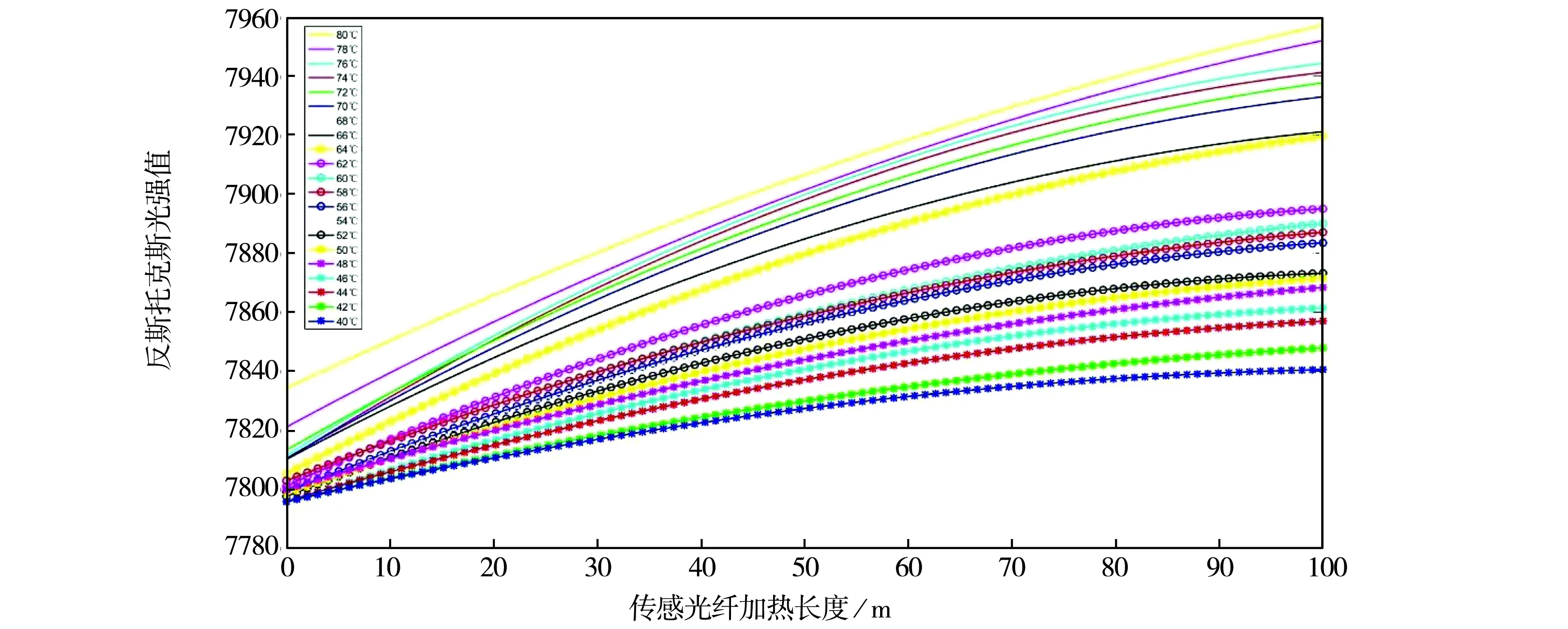
图6 光强值与传感光纤加热长度拟合关系曲线图
由于火源定位的过程中需综合考虑四个加热区域的光强值来对加热弧长进行判断,任意两个温度的拟合曲线存在1个交叉点不影响四个区域加热长度的确定.通过此拟合模型规律可将新区域内监测到的反斯托克斯光强值(a1,a2,a3,a4)转化为经过拟合计算的一组传感光纤加热弧长(l1,l2,l3,l4),其中左上角小区域为起始标号,顺时针旋转的标号顺序为(a1,a2,a3,a4)、(l1,l2,l3,l4)的标号顺序.
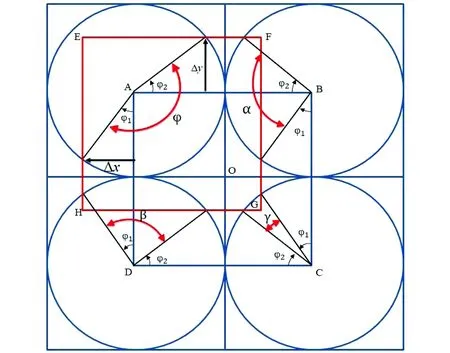
图7 精确定原理图
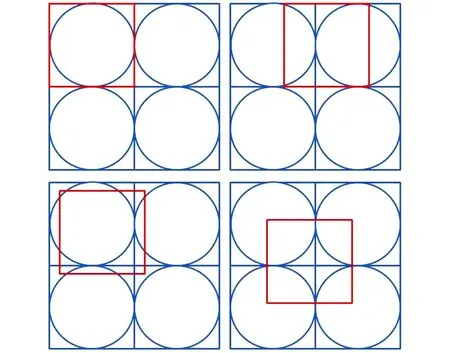
图8 等效加热区位置类型图
可建立以下关系式:
正方形ABCD为等效加热区的粗略定位,如图7所示.其中心点O的位置坐标为通过粗略定位方法获得的火源中心坐标(X,Y),正方形EFGH为等效加热区的实际位置,φ1为因横向平移而改变的旋转角,φ2为因纵向平移而改变的旋转角,α、β、γ、φ为传感光纤加热段的弧长l1、l2、l3、l4所对应的圆心角,ΔX为等效加热区在横向的平移量,ΔY为等效加热区在纵向的平移量.规定图中的所有旋转角顺时针旋转为正,ΔX向左为正方向,ΔY向下为正方向.
(9)
(10)
公式中:L1、L2、L3、L4分别为圆心角α、β、γ、φ的弧长形式,m;r为传感光纤环的半径,m.
其中,加热区域内部共有四种位置类型,如图8所示.
图8中红色正方形为等效加热区轮廓,蓝色内切圆每个小区域的内部的传感光纤.这四种类型分别为(l1,l2,l3,l4)中包含三个0元素;(l1,l2,l3,l4)中包含两个0元素;(l1,l2,l3,l4)中包含一个0元素;(l1,l2,l3,l4)无0元素.下面进行逐一分析:
(1)(l1,l2,l3,l4)中包含三个0元素
l1≠0:ΔX=r,ΔY=-r,
(11)
l2≠0:ΔX=-r,ΔY=-r,
(12)
l3≠0:ΔX=r,ΔY=r,
(13)
l4≠0:ΔX=-r,ΔY=r,
(14)
公式中:ΔX为等效加热区在横向的平移量;ΔY为等效加热区在纵向的平移量;r为小区域内的传感光纤环的半径.
(2)(l1,l2,l3,l4)中包含两个0元素
以(l1,l2,l3,l4)l2>l1为例,根据圆心角及弧长关系可得到:
ΔY=-r;L3<0;L2=l2+L3;L1=l1-L3;L4=-L3,
(15)
将上式带入公式(9)、公式(10)可得以下系数矩阵:
(16)
(3)(l1,l2,l3,l4)中包含一个0元素
以(l1,l2,l3,l4)为例,根据圆心角及弧长关系可得到:
L1=l1+L4;L2=l2-L4;L3=l3-L4,
(17)
将上式带入公式(9)、公式(10)可得以下系数矩阵:
(18)
(4)(l1,l2,l3,l4)无0元素
根据圆心角及弧长关系可得到:
L1=l1;L2=l2;L3=l3;L4=l4,
(19)
将上式带入公式(9)、公式(10)可得以下系数矩阵:
(20)
整理求解结果,如表1所示。

表1 精确定位公式表
通过将解得的ΔX、ΔY与粗定位的热源位置中心坐标(X,Y)进行叠加,得到新坐标(X+ΔX,Y+ΔY),该坐标为火源中心在整个二维平面的精确位置坐标.
3 实验与结果分析
3.1 实验方案
为验证经该定位方法的可行性及确定该方法的误差,通过在实验室内用尺寸为5 cm×5 cm×2.5 cm的酒精炉来模拟火源,将其中心作为火源中心,在酒精炉的正上方50 cm处放置一个尺寸为1.5 m×1.5 m×0.05 m的隔热板,由于酒精燃烧而产生的热气流上升至隔热板并在其下方产生一个热气层,因此可在隔热板下方进行传感光纤布阵并结合本文的定位方法来定位火源中心位置,其中传感光纤环的半径为20 cm,每个小区域之间的区分段光纤长度与小区域内部加热段传感光纤长度之和为5 m,将顶层隔热板分成9个小区域.
3.2 火源定位实验数据分析
根据火源粗略定位方法及2.4.1中的实验方案,共对16个火源位置做了定位实验,定位数据表如表2所示.
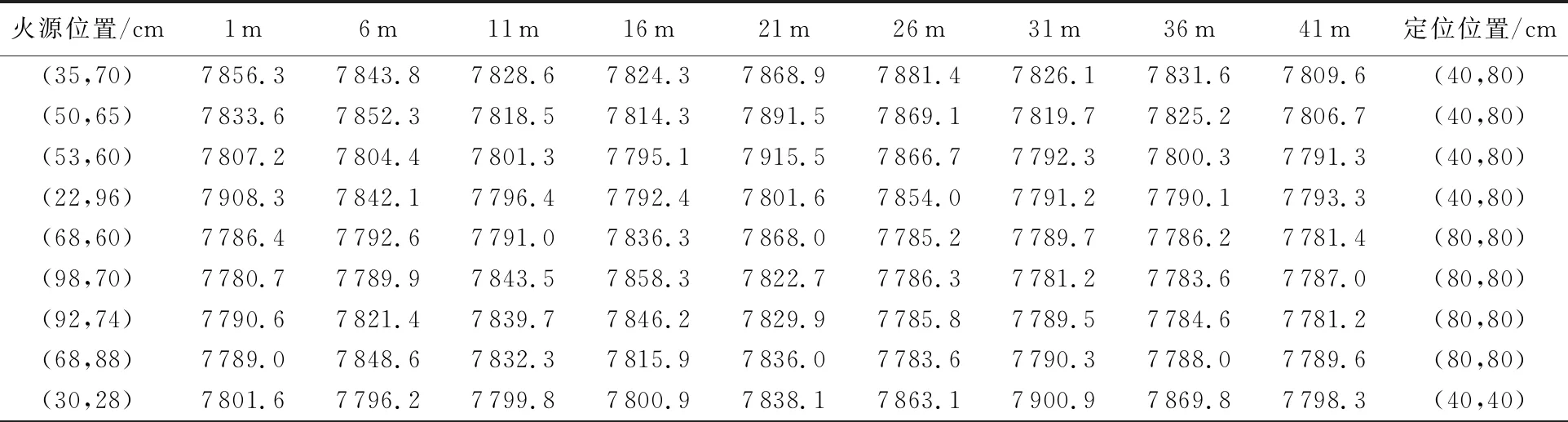
表2 火源位置粗滤定位表
(续)表2
通过粗略定位方法确定四个监测光强值后,由于火源温度未知,所以需要将监测光强带入光强拟合模型进行判断.根据圆心角及弧长规律可知在实际加热过程中,火源正上方的四段光纤弧长之和应为传感光纤环的周长,所以可以选择拟合计算出加热弧长之和与传感光纤环的周长之差最小的一组光强拟合模型.以火源位置为(30 cm,28 cm)的反斯托克斯光强监测值(7 863.1,7 838.1,7 900.9,7 869.8)为例,逐个带入拟合标准,得出加热段传感光纤弧长之和与加热段传感光纤周长的差值表,如表3所示.

表3 周长误差表
由表3中数据可知将光强数据带入44 ℃的光强拟合模型时的误差-4.70是所有温度标准中误差最小的,所以将火源位置为(30 cm,28 cm)的反斯托克斯光强监测值带入44 ℃的光强拟合模型中进行拟合求解,进而可以对火源位置进行精确定位.
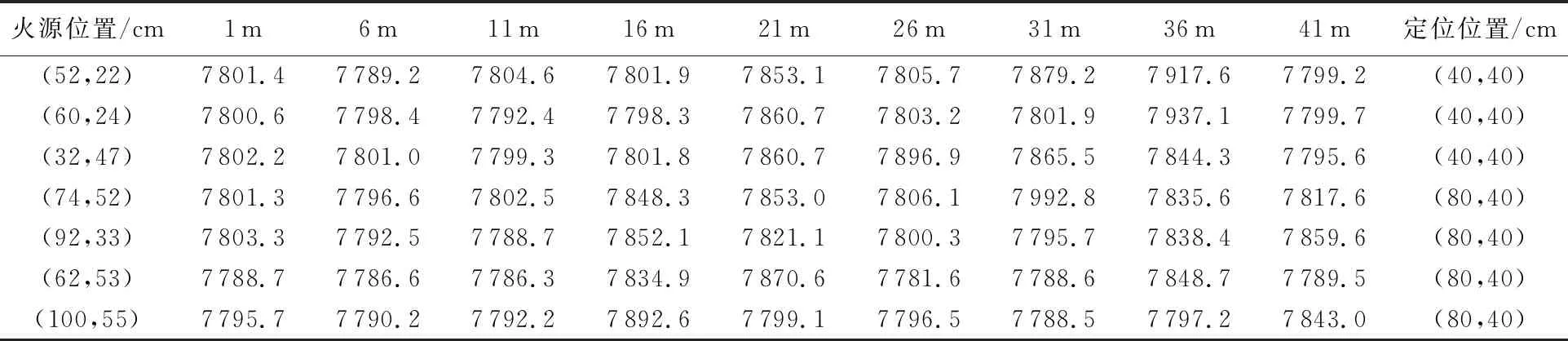
对16组经过粗定位的火源位置进行精确定位,实验结果如表4所示.

表4 精确定位误差表

(续)表4
3.3 误差分析
实验过程中由于反斯托克斯光强拟合模型存在拟合误差,理想化隔热板热气层模型等原因,实际的火源位置坐标与实测的火源位置坐标位置应有一个定位误差范围,本实验的误差范围计算方法,为以实际的热源平移量(ΔX1,ΔY1)为圆心,以其与定位计算得出的火源平移量(ΔX2,ΔY2)之间的距离为半径的圆的面积为火源定位误差范围δ,即
δ=π[(ΔX1-ΔX2)2+(ΔY1-ΔY2)2].
(21)
由表4可知,在每一个1 200 cm×1 200 cm的精确定位区域的范围内,定位误差范围不超过54 cm2.
4 结 论
本文从分布式光纤拉曼测温原理出发,利用其监测方便、实时检测、分布式测量、空间分辨率高的优点,针对室内火源定位存在定位精度低,传感器布阵成本高等问题,提出了一种利用分布式光纤温度传感技术的火源定位方法.并给出实际的传感光纤布阵方案、粗略定位、精确定位模型.通过实验验证了在1 200 cm×1 200 cm的精确定位区域内的,对火源中心定位误差范围可控制在54 cm2以内.有效的解决了火灾火源定位精度低的问题以及分布式光纤传感在二维、三维传感领域的应用难点问题.
猜你喜欢
传感技术学报(2022年7期)2022-10-19
今日农业(2022年15期)2022-09-20
水上消防(2021年5期)2022-01-18
辽宁省博物馆馆刊(2021年0期)2021-07-23
好日子(2020年3期)2020-06-03
分析化学(2017年12期)2017-12-25
分析化学(2017年12期)2017-12-25
新疆人文地理(2016年9期)2016-05-14
环球时报(2009-07-06)2009-07-06