
基于PSO-BP的APU智能故障诊断方法研究*
2020-04-10 05:47刘岩松龙岩李景奎赵浩宇黄辰沈阳航空航天大学中国南方航空股份有限公司沈阳维修基地
航空维修与工程 2020年1期
■ 刘岩松 龙岩 李景奎 赵浩宇 黄辰/沈阳航空航天大学 中国南方航空股份有限公司沈阳维修基地
0 概述
辅助动力装置(APU)是放置于飞机尾部的燃气涡轮发动机,其基本构造与航空发动机类似,航空发动机故障诊断方法[1-3]对提高APU故障诊断水平具有重要的借鉴意义。目前,对于APU故障诊断研究的方法很少,付华等[4]提出了一种基于小波包和最小二乘法支持向量分类器相结合的民航APU航空传感器故障诊断系统,可有效提高APU航空传感器的故障诊断效率。罗云林等[5]提出了一种基于多小波和最小二乘法支持向量分类器融合的APU外部件故障诊断系统,可以达到预期目标并满足故障诊断要求。郭晓静等[6]提出了一种基于可测信息源的APU故障智能诊断方法,采用BP神经网络建立智能故障模型,提高了航空公司维修的自动化水平。但是,仅利用BP神经网络建立的故障模型存在诊断误差较大、仿真结果输出不稳定等问题。
针对上述情况,本文提出了一种基于PSO-BP神经网络故障诊断方法,在可测信息源的APU数据的基础上建立了基于PSO-BP神经网络故障诊断系统,从而快速诊断APU所对应的故障类型,并利用测试数据对该故障诊断系统进行测试,仿真结果表明,基于PSO-BP的故障诊断算法的正确率高于BP神经网络模型。
1 粒子群算法
粒子群优化算法的核心思想是每个粒子都是解决问题的潜在解决方案,粒子连续搜索指定区域的最佳值,根据更新公式不断更新速度和位置,适应度函数指导粒子搜索的方向和范围,单个粒子找到的最优解被称为个体极值Pbest,整个粒子群找到的最优解称为全局极值Gbest[7]。粒子速度和位置的更新公式如下:
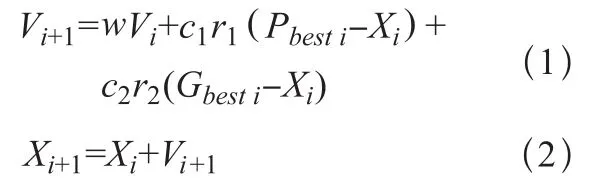
其中,Vi代表粒子的速度;Xi表示当前粒子的位置;w是加权系数;c1、c2表示群体认知系数,也被称作学习因子,一般情况下,c1=c2=1.49445;r1、r2一般是介于(0,1)之间的随机数。
为了解决搜索过程中粒子在局部最优值附近来回搜索的问题,可以增加一个加权因子w,加权因子w从最大值线性减小到最小值,其中iter为当前迭代次数,这样就解决了粒子搜索陷入局部最优解的问题,而itertotal是总的迭代次数,即:

2 PSO-BP神经网络算法
粒子群算法具备全局搜索寻优解的优点,而BP神经网络拥有反向传播的特性,将两者结合优化BP神经网络的权值阈值[8-9]。由于PSO算法优化参数过多,导致整体诊断时间过长,从而失去实际工程中的诊断意义,因此本文采用一种分段诊断的方法,将整体的诊断程序分为优化部分和诊断部分两段。优化部分可以根据现有的样本数据在后台进行实时的更新,不影响诊断部分的时效性。基于PSO-BP神经网络算法故障诊断的流程如图1所示,具体步骤如下[8-10]。
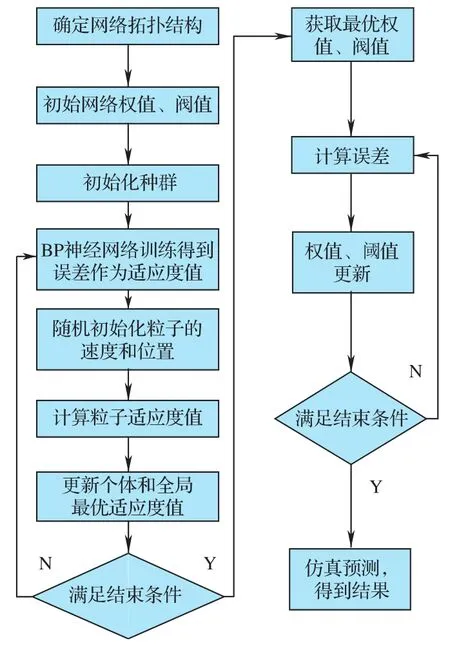
图1 PSO-BP算法流程图
1)初始化BP网络结构,确定BP神经网络隐含层的层数,并且确定每层神经元个数,权值阈值更新公式如下。

其中,η是网络学习的学习速率,η=0.8。Hj为隐藏层的输出值,ek是输出层实际输出与期望输出误差总和,a是动量学习率,a=0.9。b为权值,ω为权值。

表1 故障对应关系
2)初始化粒子群和个体粒子的速度v、位置x、粒子种群数N、速度向量的维数D,D等于从输入层到隐含层的权值个数、输入层到隐含层的阈值个数、隐含层到输出层的权值个数和隐含层到输出层的阈值个数之和。
3)计算粒子的适应度函数,并将神经网络输出和实际结果的差作为适应度函数Z[11-12]。
4)对比适应度并确定每个粒子的个体极值和全局最优极值:如果存在Present<Pbest,Pbest=Present,Pbest=xi; 否 则,Pbest不 变; 如 果 存 在 Present<Gbest,Gbest=Present,Gbest=xi;否则,Gbest不会改变。
5)根据式(1)和式(2)更新粒子的速度和位置,更新的位置和速度应在指定的范围内。位置和速度都有最大边界和最小边界值。
6)比较是否达到迭代次数和预设精度。若满足预设精度,算法收敛并保存最优权值和阈值;否则,返回第二步,算法继续迭代,直至达到预设迭代次数算法终止。
3 基于PSO-BP的APU故障诊断
具有实际工程意义的APU故障诊断性能参数为引气流量(WB)、峰值温度(EGTP)、滑油温度(OT)、排气温度(EGT)、引气压力(PT)、峰值转速(NPA)、APU启动时间(STA)。常见的APU故障类型有滑油冷却器故障、燃油组件故障、转轴机械卡阻、整机性能衰减和起动机故障等。
3.1 数据归一化处理
对基于可测信息源的22组APU数据进行归一化处理,从而缩短运行时间[13],公式如下:

3.2 故障模式的建立
建立故障对应模式,故障模式采用二进制表示,对应关系见表1。
3.3 BP神经网络训练
取16组数据作为训练数据,将6组数据作为测试数据,测试数据见表2,建立三层神经网络。基于所选择的特征性能参数确定输入层神经元的数量。输入层神经元的数量为7,隐含层神经元个数根据经验设定为12,输出层根据所选择的5种故障类型确定,因此输出层中的神经元个数为5。其他参数分别为:粒子数N=600、迭代次数iter=60、c1=c2=1.49445、最大位置xmax=1、最小位置xmin=0、最大速度vmax=1、最小速度vmin=-vmax、最大惯性权重Wmax=0.9、最小惯性权重Wmin=0.4、预设误差为10-5。
利用Matlab软件对PSO-BP神经网络算法仿真。首先,PSO算法用于优化BP网络各层的权值阈值,以获得最优的权值和阈值,将最优的权值和阈值输入到BP。由训练样本数据得出测试数据的诊断结果。结果表明,随着迭代次数的增加,个体最优适应度逐渐减小,PSO算法对于BP神经网络的优化效果显著,如图2所示。虽然BP神经网络的权值、阈值的训练时间较长,但是本程序分为两段,其中故障诊断过程仅需3s。

表2 测试数据
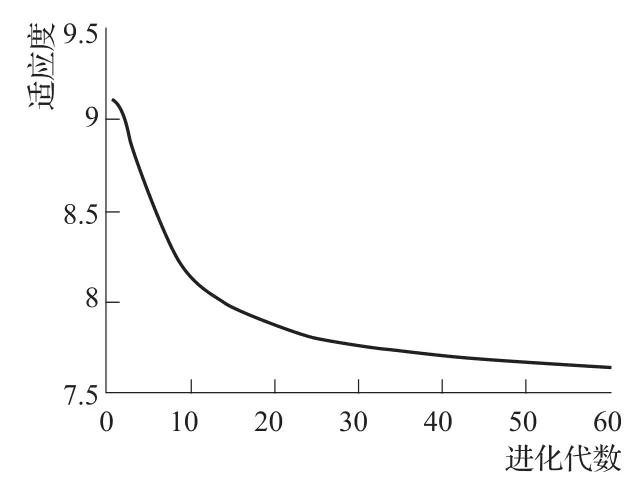
图2 最优个体适应度
3.4 故障诊断
采用训练好的PSO-BP故障诊断仿真系统对测试数据进行诊断,如图3所示,实际输出与预测输出一致,达到了预定的要求。BP神经网络诊断结果如表3所示,PSO-BP神经网络诊断结果如表4所示,通过对比第二组和第六组的诊断结果,可以得出PSO-BP故障诊断仿真系统较BP神经网络更优越的结论。

图3 训练数据预测
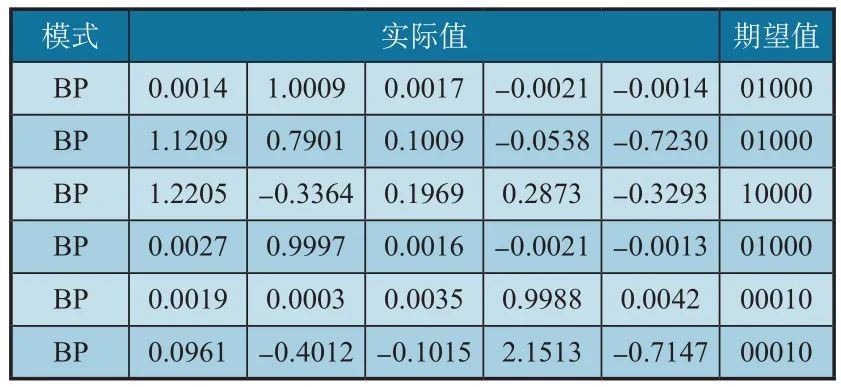
表3 BP诊断结果
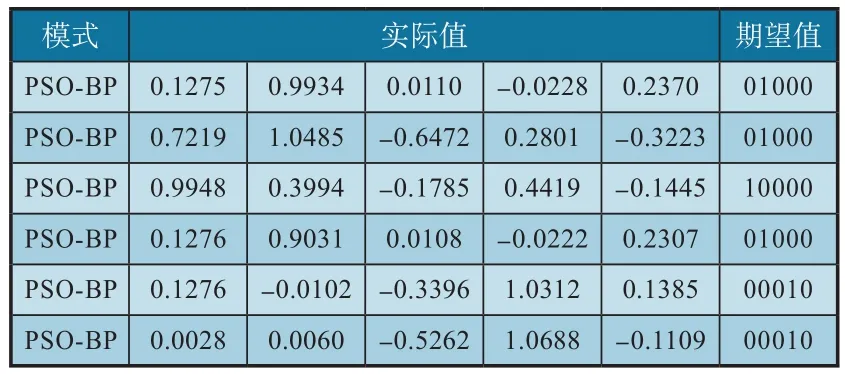
表4 PSO-BP诊断结果
BP神经网络存在诊断波动甚至错误诊断的情况,在第二组对比数据中BP神经网络将故障2诊断为故障1,在第六组对比数据中BP神经网络虽然诊断结果正确,但出现了较大的误差偏离,存在着错误诊断的隐患。以上数据对比说明,PSOBP神经网络能够显著提升故障诊断的准确性和稳定性,而BP神经网络诊断结果变化较大甚至存在诊断错误的情况。
4 结束语
利用PSO对BP神经网络的权值阈值进行优化,其诊断结果较BP神经网络更加稳定更加精准,弥补了BP神经网络容易陷入局部极值的问题。通过对APU故障诊断实例仿真说明,基于PSO算法训练的神经网络提高了APU故障诊断的稳定性和可靠性,满足APU故障诊断的需求,在实际工程中有一定的应用价值,为实现全自动智能故障诊断奠定了基础。
猜你喜欢
计算机仿真(2022年8期)2022-09-28
成都信息工程大学学报(2022年3期)2022-07-21
邮电设计技术(2021年2期)2021-03-13
科学与财富(2018年30期)2018-12-28
计算机与数字工程(2018年5期)2018-05-29
计算机测量与控制(2018年3期)2018-03-27
当代旅游(2016年10期)2017-04-17
计算机应用(2016年9期)2016-11-01
体育科技(2016年2期)2016-02-28
财经理论与实践(2015年2期)2015-04-16
