
Analysis on MAV/UAV cooperative combat based on complex network
2020-04-09 18:40:14JieruFnDonggungLiRupengLiYueWng
Defence Technology 2020年1期
Jie-ru Fn ,Dong-gung Li ,Ru-peng Li ,c,Yue Wng ,*
a Beijing Institute of Technology,Beijing,China
b Beijing Electro-mechanical Engineering Institute,Beijing,China
c Beijing Institute of Electronic System Engineering,Beijing,China
Keywords:Complex network Stochastic network MAV/UAV collaborative combat Evaluation
ABSTRACT A formation model of manned/unmanned aerial vehicle(MAV/UAV)collaborative combat can qualitatively and quantitatively analyze the synergistic effects.How ever,there is currently no effective and appropriate model construction method or theory,and research in the field of collaborative capability evaluation is basically nonexistent.According to the actual conditions of cooperative operations,a new MAV/UAV collaborative combat network model construction method based on a complex network is presented.By analyzing the characteristic parameters of the abstract network,the index system and complex network are combined.Then,a method for evaluating the synergistic effect of the cooperative combat network is developed.This method provides assistance for the verification and evaluation of MAV/UAV collaborative combat.©2020 China Ordnance Society.Production and hosting by Elsevier B.V.on behalf of KeAi Communications Co.This is an open access article under the CCBY-NC-ND license(http://creativecommons.org/licenses/by-nc-nd/4.0/).
1.Introduction
In recent years,as UAVs have been shifted from auxiliary to direct operations,a new air mode of MAV/UAV collaborative combat has emerged.This new combat mode overcomes the limitations of the self-intelligent control and special handing ability of UAVs.This mode also reduces the financial cost and material resource requirements of using MAVs alone.In this information age,MAV/UAV collaborative combat has changed the existing air combat strategies and greatly improved the effectiveness of the combat system.To achieve this mode,it is necessary to establish a relatively complete collaborative combat system or a collaborative combat capability[1].Based on existing technologies,such as computers,communication devices,and networks,this system combines all sensors on manned and unmanned aerial vehicles into a network so that operational information can be shared in real time.
When studying collaborative combat systems,the primary objective is to establish and describe the collaborative combat architecture.A reasonable model can greatly influence the results of scientific research.How ever,simply building a model and using the results to guide actual operations can be ineffective,and the results must be evaluated.For any weapon system,such evaluations are part of modern military operations.Research on the modeling and evaluation of MAV/UAV collaborative combat systems is the cornerstone of research on complete collaborative combat systems.Such research provides a quantitative decision basis for military development and the procurement of new aircraft types.Moreover,the findings form a reliable basis for the research of combat guiding concepts and tactics.
In a collaborative combat system,each combat or detection unit can be regarded as a node of the network.Complex network theory is used to create an abstract model of MAV/UAV collaborative combat.Through analysis and evaluation,the architecture of the collaborative combat approach can be derived.The prominent feature of scale-free complex networks is that they are incredibly resilient to unexpected errors.That is,the unexpected faults of some random nodes will negligibly affect the normal operation of the network.How ever,when important nodes are destroyed,the network will become very fragile.If a certain number of important nodes fail,the whole network tends to collapse[2].Recently,some related efforts have been made to construct combat network models.New man[3]review ed developments in concepts such as the small-world effect,degree distributions,clustering,network correlations,and random graph models.The attack network model proposed by Care[4,5]used a connection matrix as an analysis tool and matrix eigenvalues as indicators,and an effective method of evaluating an attack network model was proposed.Dekker[6-8]utilized various network topological models in a combat effectiveness analysis of multiagents and discussed the advantages and disadvantages of each model.Cheng[9]presented a combat network of a weapon equipment system.Then,on this basis,an operational capability evaluation index of a weapon system-of systems based on an operational loop is constructed.Zhong[10]divided the MAV/UAV cooperative engagement system into three hierarchical levels,i.e.,mission level,task-cluster level and task level and designed a series of simulation experiments to verify the effectiveness and superiority of the proposed algorithms.Zhu[11,12]derived the topological structure by modeling a combat system.Shen[13]discussed the characteristics of attacking networks by establishing a topological model with“network rings”.Yang[14]constructed a network topological model of air combat using complex network theory and discussed the influence on system viability.Mu[15]studied the control problems when heterogeneous multi-agents perform tasks cooperatively,and realized the consensus problem between a quadrotors and two-wheeled mobile robots.In addition,the team also studied a novel integral sliding algorithm for two-w heeled mobile robots and quadrotors,which is used for model uncertainties and route tracking in the presence of external disturbances[16].Fan[17]studied the intercommunication and combat behaviors among combat entities.Based on the information entropy,the effect of capability uncertainties on the collaborative combat is described quantitatively.
Based on graph theory,this paper constructs a MAV/UAV collaborative combat network model by using the generation model of a random network.The cooperative effect evaluation index is combined with the complex network know ledge.By analyzing the characteristic parameters of the abstract network model,the cooperative effect evaluation index is qualitatively and quantitatively studied,and a synergistic effect evaluation method for an MAV/UAV collaborative combat network is provided.
2.Topological model of collaborative combat
According to graph theory[18],the expression of a network is F=(V,E),where E and V are the sets of edges and nodes,respectively.Each edge in E corresponds to a pair of nodes in V;thus,the construction of a network model involves the generation and combination of nodes and edges.
1 Definitions of Nodes and Edges
In an MAV/UAV collaborative combat system,each entity can be regarded as a node,and communication,coordination and collaboration between entities can be regarded as edges.An edge existsas long as there is a connection between nodes.Based on the combat network model proposed by Care[2,3]and the OODA(Observation,Orientation,Decision,Action)cycle model[8],different combat entities can be divided into four types according to their functions:sensors(manned scout aircraft S1and unmanned scout aircraft S2),decision makers(command aircraft D),influencers(manned combat aircraft I1and unmanned combat aircraft I2)and targets.
2 Definition of Node Connections
According to the actual combat situation,a reconnaissance team consists of one manned scout aircraft and multiple unmanned scout aircrafts.Under the guidance of the command aircraft,they enter the enemy's target area and conduct reconnaissance and detection of the enemy's ground defense fortifications and command base.To protect the pilots in manned aircraft and reduce the loss of the entire system,the unmanned scout aircraft S2perform detection and interference tasks in the designated area.Once the target is found,they immediately lock and track the target and then return the target information and battle field status to the manned scout aircraft S1.Manned scout aircraft S1transmit the integrated information to the command aircraft D.Command aircraft D finish the situation assessment,tactical decision making and mission control tasks and then send the mission instructions to the manned combat aircraft I1.According to the target information and mission instructions,manned combat aircraft I1completes the coordinated target allocation and route planning tasks for unmanned combat aircraft I2.After the manned combat aircraft I1issues an attack command,unmanned combat aircraft I2attacks the target and destroys it.Finally,combat aircraft I1is responsible for surveillance and reconnaissance missions,as well as battle field assessments after unmanned combat aircraft I2strikes.If the target is not destroyed,they will perform supplementary strikes.
As the command and control center,command aircraft D must obtain the collaborative detection information from manned scout aircraft S1and unmanned scout aircraft S2and then distribute the consolidated information to manned combat aircraft I1and unmanned combat aircraft I2in a given amount of time.
Due to the tight formation of MAV/UAV,vehicles must maintain communication at all times to avoid collisions and accidental attacks and to ensure general flight safety.Considering the advantages and disadvantages of each aircraft,the tasks of each aircraft are set as follow s:the cooperative reconnaissance network is composed of manned scout aircraft S1and unmanned scout aircraft S2or command aircraft D,which is responsible for target reconnaissance and situational awareness.The cooperative attack network is composed of manned combat aircraft I1and unmanned combat aircraft I2,which are responsible for the cooperative attack.The command plane D keeps communication with each aircraft at all times and has a certain anti-jamming ability.It can adjust the formation structure in real time according to the changing battlefield environment and form a combination mode that can better adapt to the battle field environment.Assume that the flying heights of the individual aircraft are different,and there will be no collisions between them.The corresponding abstract combat network is shown in Fig.1.
As shown in Fig.1,the model must satisfy the following conditions.①Node D can be connected with S1,S2,I1and I2.How ever,command aircraft have a maximum workload limit,and the corresponding workload cannot exceed kmax.②To avoid a heavy workload for manned aircraft,different nodes in S1and I1cannot be connected.③All nodes of S2and I2must have at least one connection edge with node S1,I1or D.Although a UAV has a certain degree of autonomy,it is still inseparable from MAV control to avoid situations in which a UAV cannot control itself in a timely manner when encountering unexpected problems.
3.Network model building algorithm
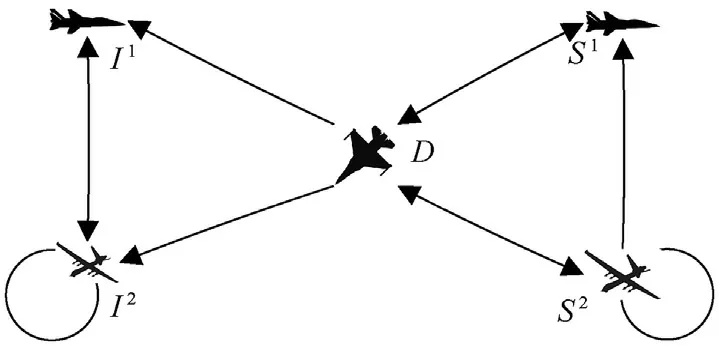
Fig.1.A collaborative combat network topology.
Suppose the sum of points is N,where NS1+NS2+ND+NI1+NI2=N.According to the composition of the previous air combat formation,the proportions of nodes S1,S2,D,I1,I2are set to PS1,PS2,PD,PI1and PI2respectively.PDDis the connection probability of node D;PDS1is the connection probability between nodes D and S1;PDS2is the connection probability between nodes D and S2;PDI1is the connection probability between nodes D and I1;and PDI2is the connection probability between nodes D and I2.To meet the load requirements,the degree of each node D should be less than kmax,that is,is the connection probability between unmanned combat aircraft,which refelcts their connectivity.is the connection probability between unmanned scout aircraft,which reflects the ability of collaborative detection and the extent of information sharing.
The connection probabilities of S2-D and S2-S1are PS2Dand PS2S1,respectively.Similarly,the connection probabilities of S2-D and S2-S1are PI2Dand PI2I1,respectively.The connection probabilities PS2D,PS2S1,PI2Dand PI2I1reflect the information transmission capability between UAVs and MAVs,which can also be seen as the MAV/UAV collaboration efficiency or the ability to replan during an emergency in which the UAVs maintain cooperation with the MAVs.
4.Network model generation
Assume that the sum of nodes is 30.According to previous air combat experience,there are 2 command aircraft,9 unmanned scout aircraft,3 manned scout aircraft,12 unmanned combat aircraft,and 4 manned combat aircraft.In this case,the proportion of each node is 0.067,0.3,0.1,0.4,and 0.133.Additionally,kmax=15,PS2S1=0.5,and PI2I1=0.4.Because the connection between nodes is based on a certain connection probability,according to complex network theory,the generated network is a random network.For simplicity,the random network studied in this paper is unprivileged and undirected.The basic method involves randomly generating one number r between 0 and 1.If r is less than the connection probability p between i and j,the matrix element Aij=Aji=1;otherwise,Aij=Aji=0.
According to the algorithm proposed in this paper,the adjacency matrix A can be generated.A schematic diagram of the collaborative combat network is shown in Fig.2.All the combat entities in the figure are shown in a 3000×5000 area.Command aircraft D has the largest degree value and the densest surrounding connections,so it is very important in the network.In this figure,the connections among and distribution of all nodes can be clearly observed.
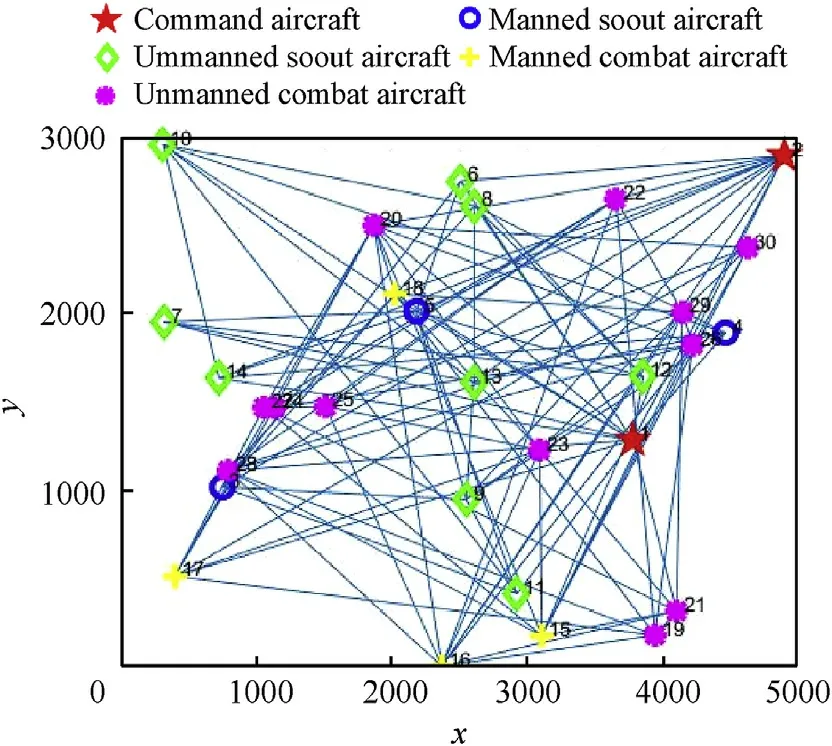
Fig.2.Collaborative combat network.
5.Network parameter analysis
In the previous section,through the use of simulation software and the random network generation mode,the network of the MAV/UAV collaborative combat is generated.Next,the parameters of the sample network will be analyzed.
5.1.Degree
The degree describes the attributes of a node.The degree kiof node i is defined as the number of other nodes connected to that node.Obviously,the greater the degree of a node is,the more important the node.The average of the degree of all nodes in the network is called the average degree,which is recorded as<k>.The degree distribution function can be expressed by P(k).Based on P(k),when a node is randomly selected,the degree of the node is exactly equal to k.

where nkdenotes the number of nodeswith degree k and N denotes the sum of nodes.The higher the average degree of nodes is,the greater the information load.The distribution of important nodes in the network can be seen from the distribution function of the node degree.If the center line of the degree distribution function is large,the greater the burden of node connections in the network.
The MAV/UAV collaborative combat network studied in this paper is undirected and unweighted.The average node degree is shown in Table 1.The average node degree of the sample network is 7.13,which indicates that the information-carrying capacity of the nodes in the network is moderate.
Fig.3 shows the degree distribution of each node in the example network.As the command and control center of the whole system,the average degree of the command aircraft node is 13.Its information load is the largest,and it is the most important unit of the whole cooperative system.As the assistant decision-making center of the whole system,the average degree of the manned scout aircraft is 6.67,and the average degree of the manned combat aircraft is 8.25.The average node degrees of the unmanned scout aircraft and unmanned combat aircraft are 7.08 and 5.56,respectively.Because the UAV has poor decision-making ability,its average degree value is relatively low.In this cooperative combat formation,the number of unmanned combat aircrafts is the largest,and there is communication between them,resulting in the average node degree being slightly larger than that of the manned scout aircraft.
Fig.4 shows the distribution function of each node degree in the example network.From the graph,it can be seen that the degree distribution of nodes is approximately a normal distribution,which means that the degree of nodes is relatively average.It conforms to the actual situation of the MAV/UAV.
To embody the completeness of the research,50 cooperative combat networks are randomly generated according to the network generation mode in the previous section.The averagenode degrees of each type of node in each network are analyzed,and the average values of 50 sets of data are calculated.The results are shown in Table 2.

Table 1 Average node degree.
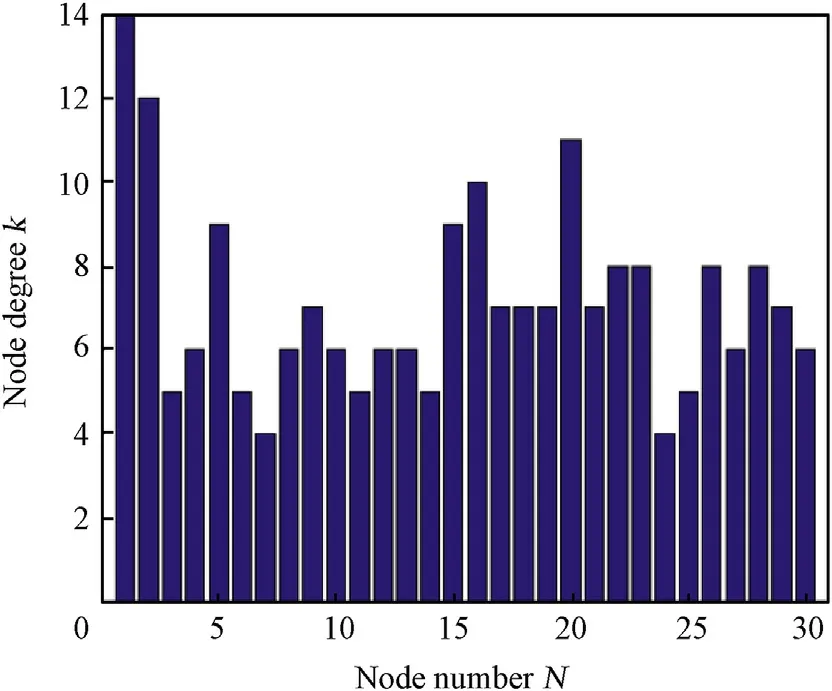
Fig.3.Degree of each node.
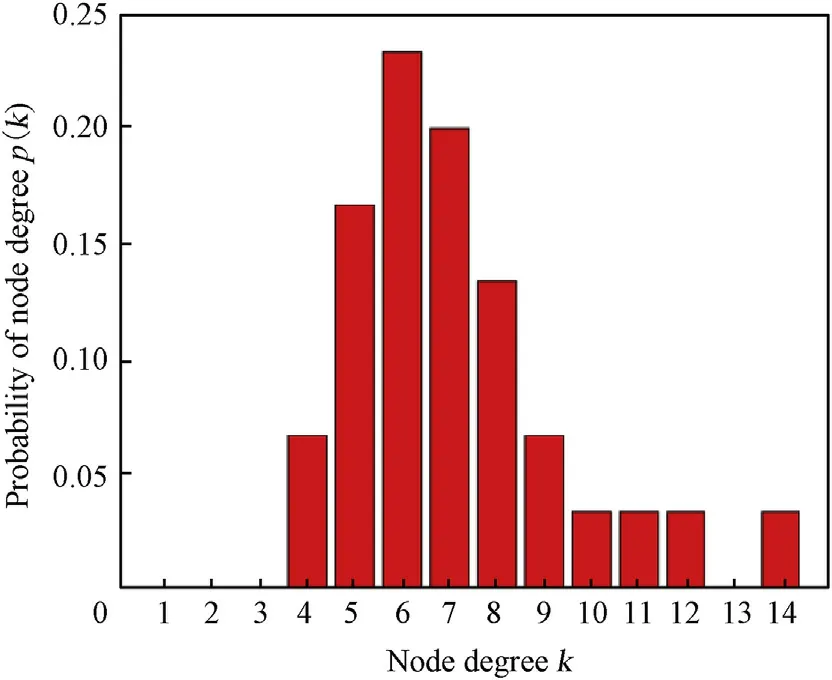
Fig.4.Distribution function of node degrees.

Table 2 Average node degree of 50 networks.
The results show that the average node degree of all types of nodes has the following relationship:command aircraft>manned combat aircraft>unmanned combat aircraft>manned scout aircraft>unmanned scout aircraft.This is consistent with the average degree of nodes generated by the example network and can reflect the information-bearing degree of all types of nodes in the network.
5.2.Average path length
The distance dijis defined as the number of edges on the shortest path between nodes i and j.The average path length is the average of the distances between any two nodes.The average path length is an important parameter used to measure the transmission efficiency of the network.

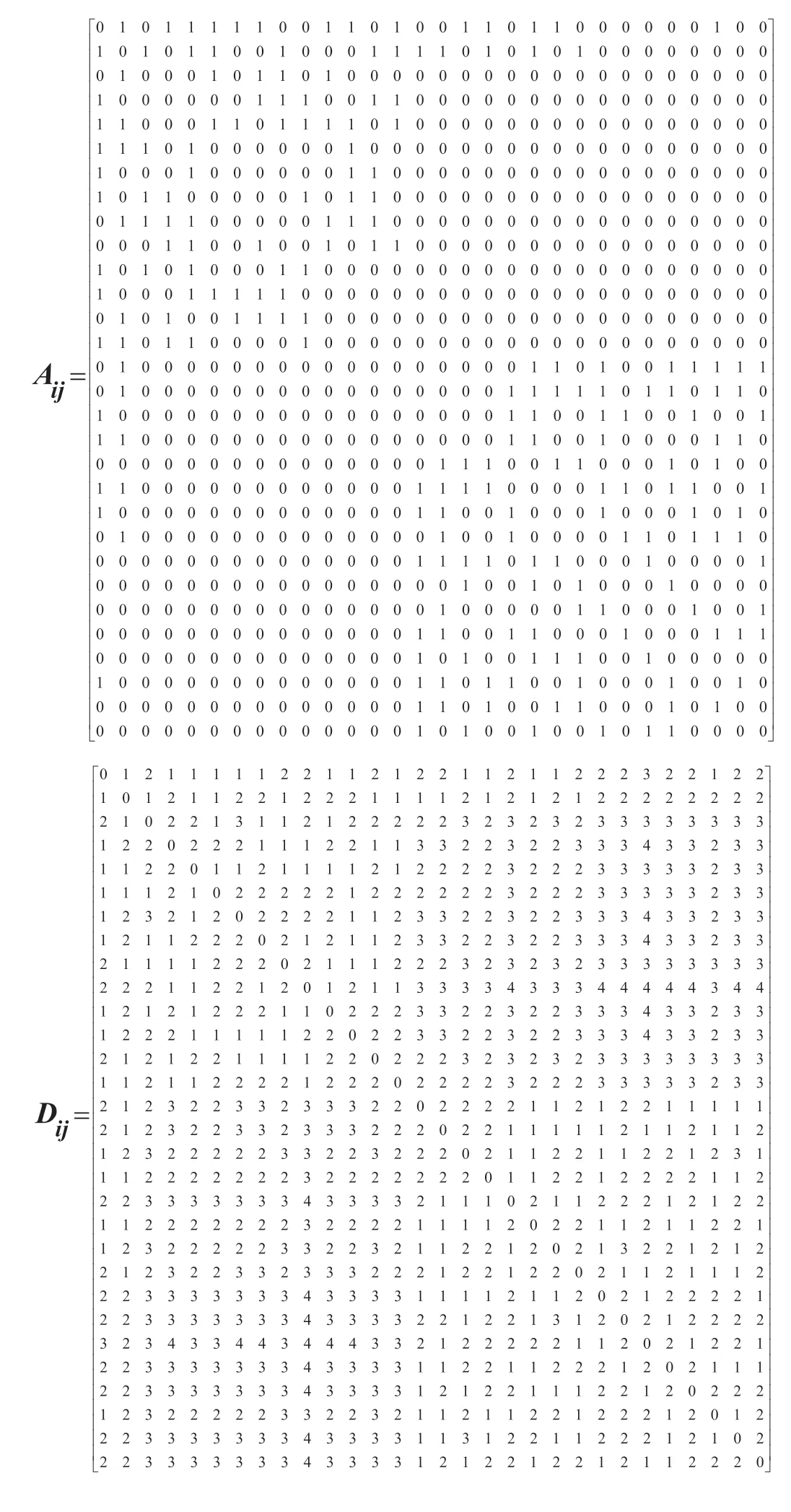
The adjacency matrix Aijand the shortest path matrix Dijof the network are shown as follow s.The number of edges of the longest path is 4,and the average path length is L=2.0874 in the network.Therefore,any two nodes in the network can make contact through a third node.In short,the transmission efficiency of the collaborative combat network is high.
The network generation test was also performed 50 times,and the average path length of 50 groups of networks was obtained,as shown in Table 3.The average path length of the network is L=2.1779.Under the network generation mode proposed in this paper,any two nodes can generally connect through a third node,which shows that the network transmission efficiency of the MAV/UAV cooperative combat network is good.
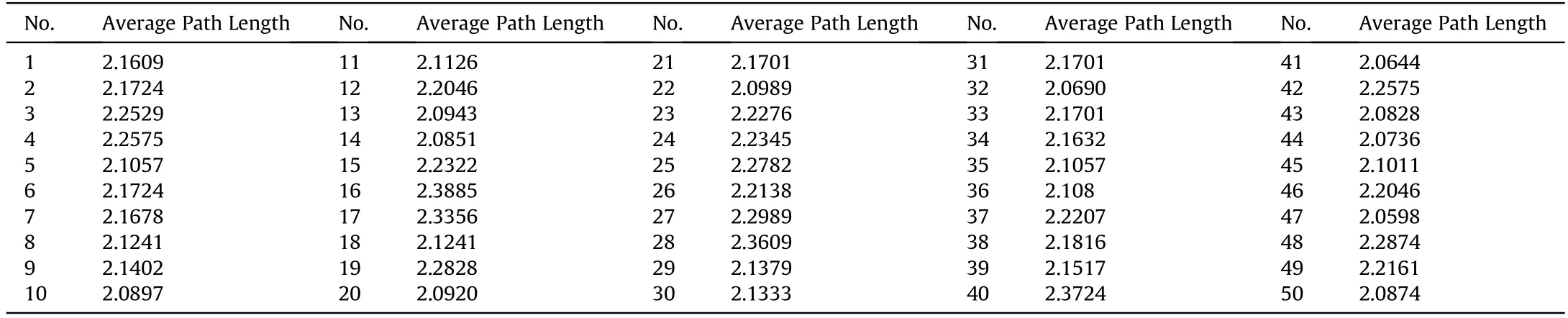
Table 3 Average path length of 50 networks.
5.3.Clustering coefficient
The clustering coefficient Cirefers to the ratio that the number of actual edges Eito the number of possible edges ki(ki-1)among the neighbors of node i.

where kiis the number of edges connected to node i.The nodes connected to these kiedges are the neighbors of node i.The average clustering coefficient of all nodes is called the network clustering coefficient C.The larger the clustering coefficient C is,the higher the network connectivity.
The clustering coefficients of all nodes in the network are shown in Fig.5,and the specific values are shown in Table 4.The average clustering coefficients are shown in Table 5,which indicates that the average clustering coefficient of unmanned scout aircraft is the highest.Additionally,unmanned scout aircraft are closely connected,which is helpful for sharing target information and situational battle field information.The average clustering coefficient of scout nodes is higher than that of combat nodes,which indicates that scout nodes are more closely related than combat nodes.The average clustering coefficient of UAVs is higher than that of MAVs,which indicates that the relationship among UAVs is closer than that among MAVs.The network clustering coefficient C is 0.3832,which suggests that the network is highly connected.
Similarly,50 groups of randomly generated network models were studied,and the clustering coefficients were obtained,as shown in Table 6.The average clustering coefficient C=0.3972 is obtained by averaging the 50 sets of data,which indicates that the probability of the connections in each node's neighbors is 39.72%.It further shows that in the network generation mode proposed in this paper,the connection of the MAV/UAV cooperative combat network is good.
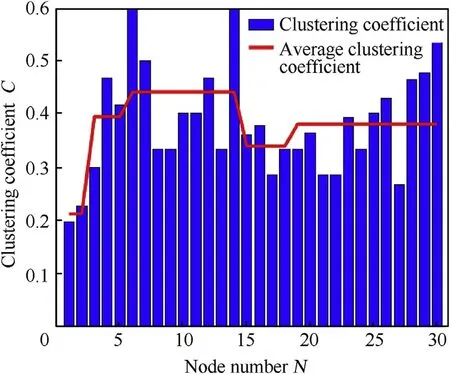
Fig.5.Clustering coefficients.
5.4.Betweenness
Betweenness reflects the distribution of a node on the path between other nodes.Thus,a node of with a high betweenness value controls the messaging between other nodes.Therefore,during information transmission,a high betweenness node always has more information to process.
Assuming that node i is located on the shortest path from node s to t,we define1;otherwise,it will be zero.The betweenness is expressed as follow s.

The betweenness reflects the distribution of one node on the edges of other nodes,or the importance of the one node.The betweenness values of various types of nodes in the sample network are shown in Table 7.The average betweenness value of the nodes in the sample network is 15.77,which indicates that the information-carrying capacity of the nodes in the network is moderate.
Fig.6 shows the betweenness value of each node in the example network.The betweenness of the command aircraft nodes is far higher than that of other nodes.Therefore,the command aircraft are very important in the system.How ever,there is no significant difference in the betweenness of UAVs and MAVs.The betweenness levels of some UAVs are even higher than those of MAVs.The results illustrate that MAVs have not fully developed their auxiliary characteristics.This situation is extremely dangerous,because once the command plane fails,the whole cooperative combat network may be paralyzed due to the interruption of communication.
Similarly,50 randomly generated cooperative combat networks are analyzed,and the betweenness values of all types of nodes in the network are obtained.The average betweenness of the 50 sets of data is as shown in Table 8.
The results show that the betweenness value of the command aircraft is much higher than that of the other nodes,follow ed by the manned combat aircraft and the manned scout aircraft.The smallest betweenness values are for the unmanned combat aircraft and unmanned scout aircraft.This shows that under the current connection probability,the communication burden of the command aircraft is too heavy,and the MAV does not play a supporting role.This phenomenon is ubiquitous.
In view of the situation that the betweenness value of the command aircraft is too large,this paper engages in a preliminary exploration on how to alleviate the communication burden of thecommand aircraft.According to the network generation mode described,we assume that the connection probabilities of the MAVs and UAVs are PS2S1=0.5 and PI2I1=0.4,respectively.Three collaborative combat networks are randomly generated,and three groups of betweenness curves are derived,as illustrated in Fig.7.

Table 4 Clustering coefficients of nodes.

Table 5 Average clustering coefficients.
The betweenness derived by improving the connection probability PI2I1of the MAVs and UAVs is shown in Fig.8.The curve not only illustrates the importance of command aircraft nodes but also the auxiliary characteristics of MAVs,which are used as auxiliary nodes.As the connection probability PI2I1increases,the betweenness of commander aircraft decreases,and that of the manned combat aircraft increases.The red circle indicates the nodes of manned combat aircraft.To some extent,the manned combat aircraft share the communication burden of the commander aircraft.Thus,the collaborative efficiency has been improved.
The assumed connection probabilities(PS2S1,PI2I1)in this paper reflect the communication capability between the UAVs and MAVs.By adjusting the value of the connection probability,the collaborative efficiency can be influenced.Therefore,the connection probability has an important influence on the collaborative efficiency.This relation is in line with the emergent property of stochastic networks.That is,once the connection probability exceeds a certain value,the properties of the network change radically.This approach provides a feasible way of evaluating the collaborative efficiency and provides a foundation for establishing an indicator for collaborative efficiency evaluation.
6.Collaborative efficiency evaluation
6.1.Collaborative communication capability
The collaborative communication capability of a network can berepresented by its average shortest path.A shorter average shortest path means a stronger communication capability.By utilizing MATLAB Software,we obtained a matrix of shortest paths denoted as Dij.Based on the derived matrix,the average shortest path(coefficient of the collaborative communication capability)wascomputed.Eq.(5)gives the specific expression and the calculation result.

Table 7 Average betweenness values.
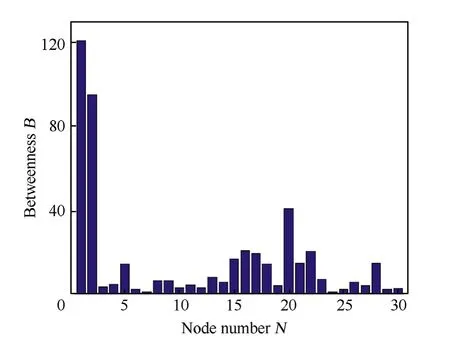
Fig.6.Betweenness.

Table 8 Average betweenness of 50 networks.
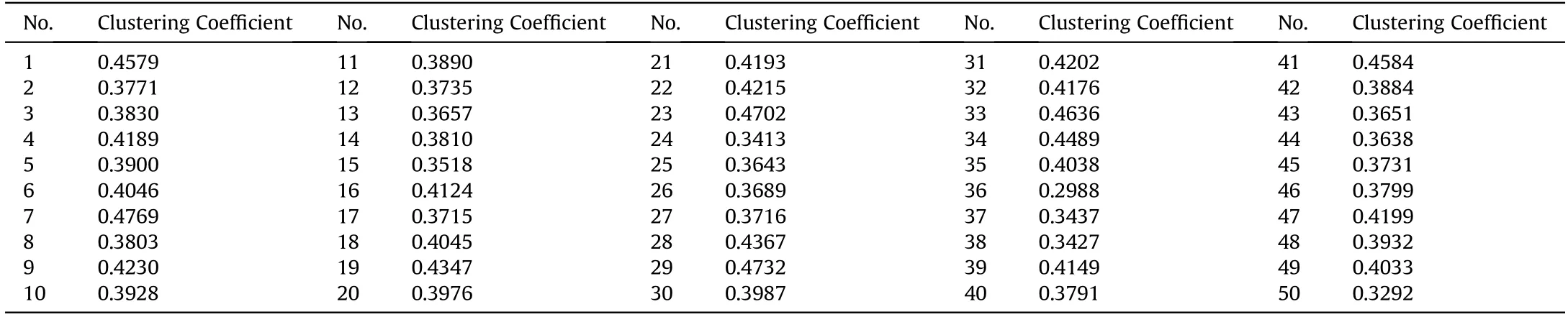
Table 6 Clustering coefficients of 50 networks.
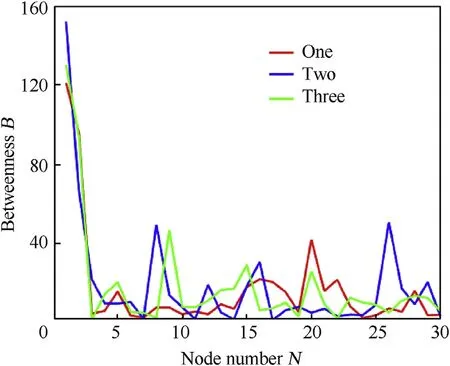
Fig.7.Betweenness of nodes(
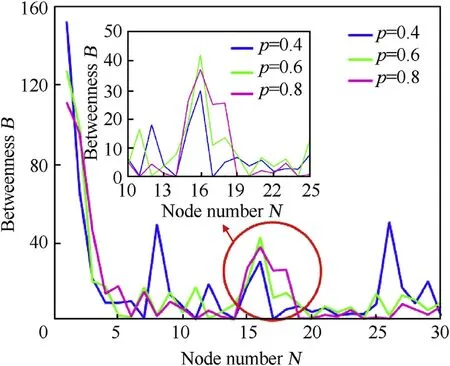
Fig.8.Betweenness with different connection probabilities.

6.2.Adaptability of the command aircraft
When the detection information from manned scout aircraft is integrated and sent to the command aircraft,a tactical decision can be made.Then,the combat commands are generated and assigned to manned combat aircraft.There is a time delay during the above process.The time delay is deemed the information delay in this paper.The information delay between manned scout aircraft and the command aircraft can be computed by their shortest paths.The information delay of the entire network can be measured by the average shortest path of the network,which is composed of manned scout aircraft and command aircraft.We define the coefficient C to illustrate the information delay of the network.This coefficient reflects the adaptability of the command aircraft pilot and is a value greater than or equal to 1.A value of C=1 represents the strongest adaptability.Table 9 illustrates the shortest paths between manned scout aircraft and the command aircraft according to matrix D.The coefficient C is derived by the following equation:CD1=CD2=

Table 9 Shortest path length matrix connected by S1 and D.
6.3.Collaborative situational perception
Unmanned and manned scout aircraft should cooperate and share perception data during the process of collaborative situational perception.The more data unmanned scout aircraft provide,the more comprehensive situational perception is.In this paper,we assume that each unmanned scout aircraft has equal perception ability(i.e.,an equal quantity of perception data).Therefore,more connections between the unmanned and manned scout aircraft represent more comprehensive situational perception.We use the ratio of connections to the total nodes of unmanned scout aircraft to depict the degree of collaborative situational perception.
Table 10 shows the connection matrix of the unmanned and manned scout aircraft.
The degree of collaborative situational perception Dsitis expressed as follow s.

Thus,the expression of the synergistic effect Eis as follow s:

where Psucis the probability of a successful attack by unmanned combat aircraft and Lrelis the reliability degree of the data links,with a value between 0 and 1.When Psucis set to 0.9,Lrelis set to 0.8,and
7.Conclusion
In this paper,the meanings of the nodes and edges in the cooperative operation network of MAV/UAV are elaborated in detail.Based on an analysis of the connection probability between nodes,a stochastic network generation model is used to construct the cooperative operation network model of MAV/UAV.By analyzing the characteristic parameters of the abstract network model,such as the node degree,average path length,clustering coefficient and median center,the synergistic effect of the network is studied.The results show that the average degree of the nodes in the network is 7.13.The degree distribution of the nodes is similar to a normal distribution,indicating that the nodes in the network have a moderate information-carrying capacity.The average path length of the network is 2.0874,which shows that the network has a good transmission efficiency.This conforms to the actual situation of the cooperative operation of MAV/UAV.The clustering coefficientof the network is 0.3832,which shows that the network has a good connection tightness.By analyzing the centrality of the network mediation,it can be concluded that when the connection probability between UAV and MAV is approximately 0.4,the mediation value of the command aircraft node is much higher than that of the other nodes.This may cause a paralysis of the cooperative operation network.By improving the connection probability between manned combat aircraft and unmanned combat aircraft,the manned combat aircraft can share the communication burden of the command aircraft,which can reduce the risk to a certain extent.By calculating the cooperative communication capability,command response capability and degree of cooperative situational awareness,the synergistic effect of the MAV/UAV cooperative combat network is quantitatively analyzed.
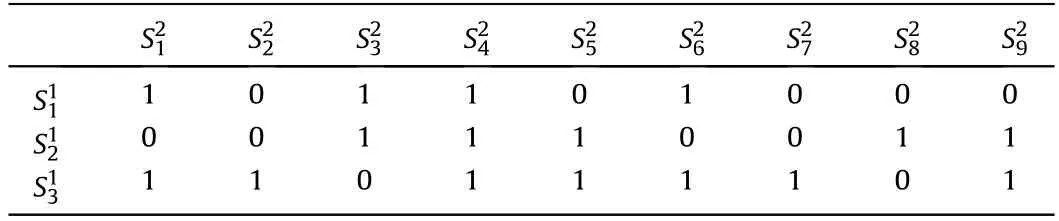
Table 10 Adjacency matrix of S1 and S2.
- Defence Technology的其它文章
- An approach for predicting digital material consumption in electronic warfare
- Initial alignment of compass based on genetic algorithm-particle swarm optimization
- The non-isothermal gravimetric method for study the thermal decomposition kinetic of HNBB and HNS explosives
- A non-myopic scheduling method of radar sensors for maneuvering target tracking and radiation control
- Research on construction of operation architecture based on complex network
- Estimating the metal acceleration ability of high explosives