
基于比例积分与多重比例谐振策略的光伏发电并网逆变器控制技术
2020-04-08 07:53贾彦钰
上海电气技术 2020年1期
贾彦钰, 李 赛
宁夏磐石检研科技有限公司 银川 750001
1 研究背景
光伏发电作为一种分布式新兴能源发电技术,具有安全、无污染、不受地域限制等优点。同时,相对于传统发电行业,光伏发电也具有输出电能质量偏低、抗负载和抗干扰能力弱等缺点,这些缺点严重影响了光伏发电并网系统的安全可靠运行,增加了电力系统的负载[1-3]。可见,提高光伏发电并网系统的稳态和动态性能,具有重要意义。
当电网末端阻抗参数出现较大幅度变化时,并网逆变器输出电能的质量往往会降低。针对这一问题,文献[4]在文献[5]的基础上提出一种自适应鲁棒控制方案,建立并网逆变器鲁棒模型,不需要对末端电网阻抗参数进行实时观测,就能够实现电网阻抗参数在大范围波动下的鲁棒稳定。文献[6]采用一种基于二阶广义积分器的锁相模块,结合比例积分(PI)和比例谐振(PR)控制策略,实现电网在谐波和不平衡电压下输出高品质电能的目的,并通过PSCAD软件[7-8]验证了研究的正确性和可行性。为了保证电网的安全、可靠运行,文献[9]通过调整光伏发电并网逆变器的有功、无功功率,对光伏发电接入点的穿越电压进行调整[10-11],保证系统经济、稳定运行。
笔者介绍了LCL型光伏发电并网逆变器的拓扑结构和传统PI电流环控制策略,在此基础上进行改进优化,提出一种基于PI与多重比例谐振(MPR)策略的光伏发电并网逆变器控制技术。对这一控制技术的可行性进行了讨论,通过在系统中加入五次、七次谐波,验证了控制技术对特定低次谐波具有良好的抑制作用,当负载参数发生突变时,还具有较好的动态响应能力。
在仿真和试验过程中,三相并网逆变器系统的负载和线路参数均相同,笔者以A相并网电流为例进行分析。
2 LCL型光伏发电并网逆变器拓扑结构
LCL型光伏发电并网逆变器拓扑结构如图1所示。图1中,Udc为直流母线电压,Cdc为直流侧电容,u为逆变器输出电压,C为电容,uc为电容电压,ic为电容电流,ug为并网电压,i1为逆变器输出电流,i2为并网电流,L1为逆变器侧电感,R1为逆变器侧电感串联等效电阻,L2为并网侧电感,R2为并网侧电感串联等效电阻。

图1 LCL型光伏发电并网逆变器拓扑结构
3 PI电流环控制原理

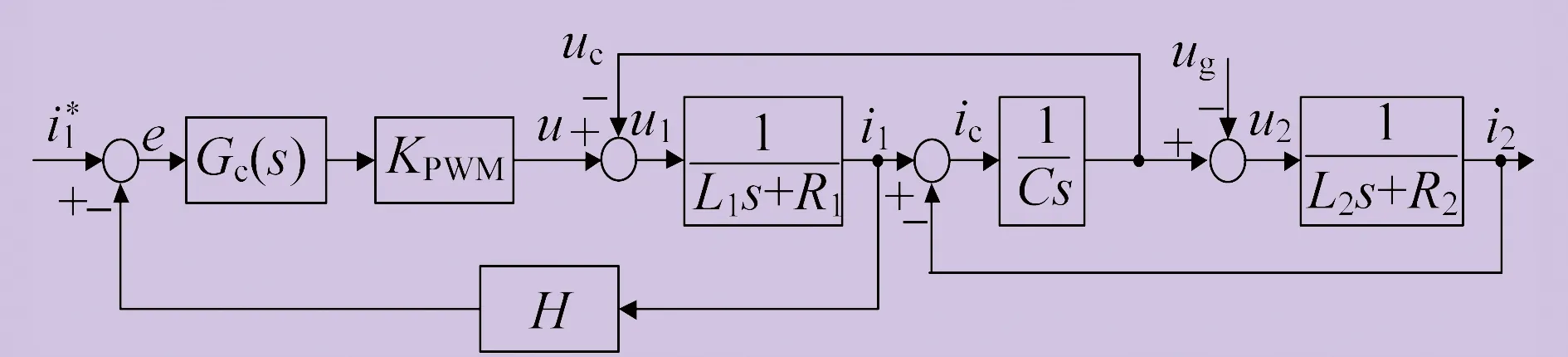
图2 传统PI电流环控制原理
在并网逆变器系统中,PI电流环作为一种最为常见的控制策略,具有快速跟踪参考指令电流的优点,但对并网电流中谐波的抑制能力较弱。针对这一问题,笔者在传统PI电流环控制的基础上,提出一种基于PI与MPR策略的控制技术。这一控制技术在消除并网电流中低次谐波污染的基础上,能够提高系统的动态响应速度。
4 PR控制原理
PR控制能够在特定次频率处产生谐振,增大该频率处的幅值增益,因此在逆变器控制系统中,对特定次频率谐波具有良好的抑制能力。
传统PR控制器的传递函数GPR1为:
(1)
式中:KP为比例因数;KR为谐振因数;ωc为截止角频率。
传统PR控制在截止角频率ωc处的相位为0,幅值增益最大,但为了在特定次频率处产生谐振,需要对式(1)进行改进,改进后的PR控制传递函数GPR2为:
(2)
式中:ω0为谐振角频率。
传统PR控制和改进后PR控制的幅频、相频特性曲线如图3所示。
由图3可以看出,当KP、KR、ωc、ω0完全相同时,相比于传统PR控制传递函数GPR1,改进后的PR控制传递函数GPR2在谐振频率处的相角范围更宽,幅值增益更大,对参考指令信号具有更好的跟踪能力。
5 MPR控制原理
光伏发电并网系统本身属于非线性系统,太阳光的不稳定会导致并网电流中含有谐波污染,其中以五次、七次谐波较为明显。改进后的PR控制只能在单一频率处产生谐振,即只能对某一个频率的低次谐波进行抑制。当需要对多个特定低次谐波进行抑制时,需要采用MPR控制。MPR控制的传递函数GMPR为:

(3)
式中:ω5为五次谐振角频率;ω7为七次谐振角频率。
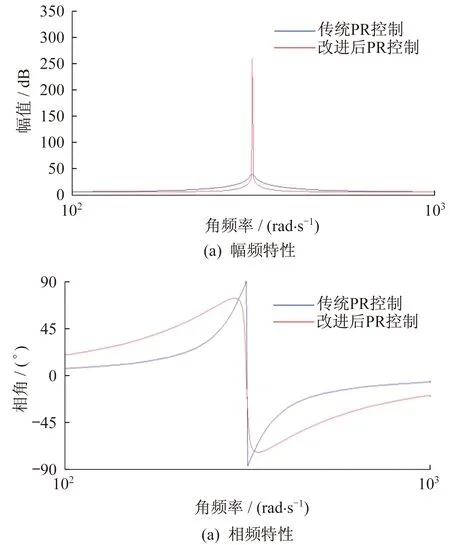
图3 PR控制特性曲线
MPR控制原理如图4所示。图4中,i*为含有五次、七次谐振频率的参考指令电流,i为含有五次、七次谐振频率的实际电流。
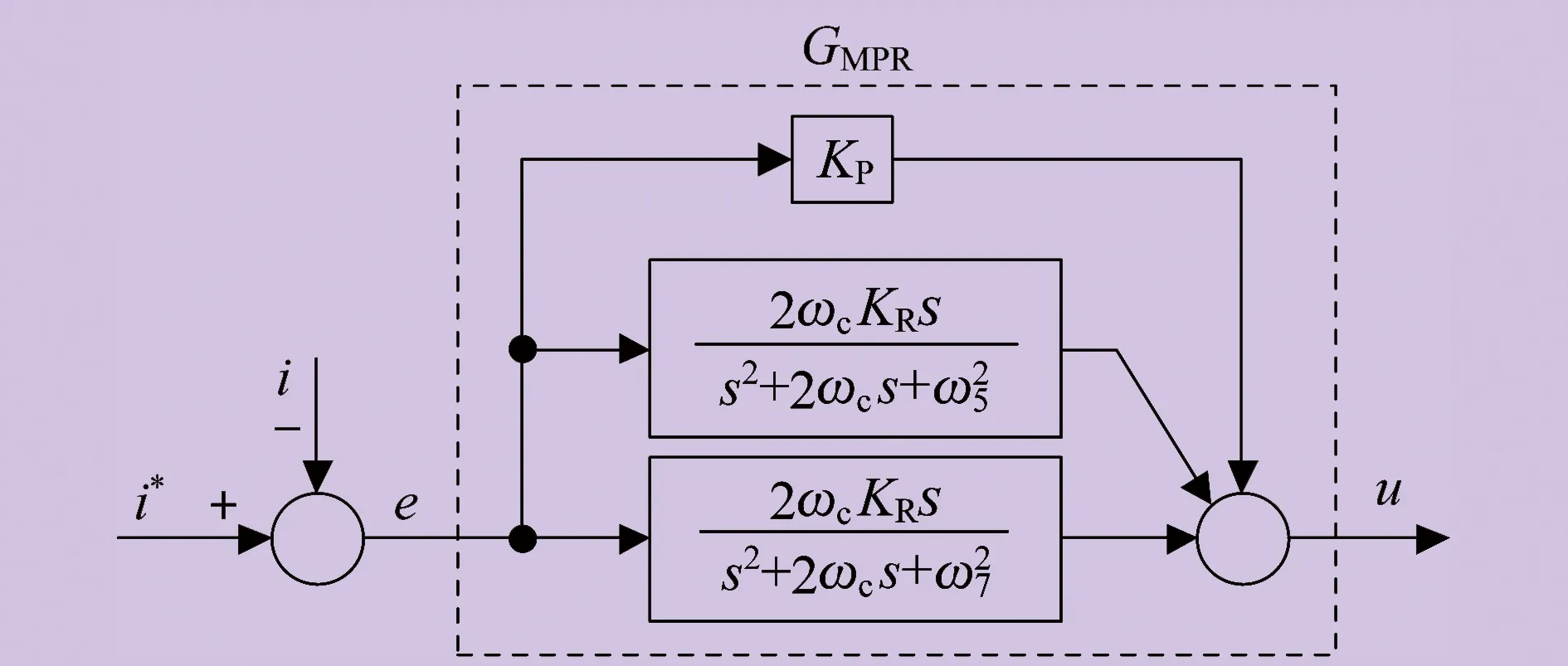
图4 MPR控制原理
为了分析MPR控制中各参数对传递函数造成的影响,分别绘制KP、KR、ωc变化时MPR控制的特性曲线,依次如图5、图6、图7所示。
由图5、图6可以看出,比例因数KP会直接影响MPR控制的带宽和稳定性,谐振因数KR会影响系统的稳态误差,综合考虑传递函数GMPR的动态和静态稳定性,应满足KR远大于KP的条件。由图7可以看出,截止角频率ωc会影响系统跟踪给定频率交流信号的能力,笔者取ωc为3.14 rad/s。
6 基于PI与MPR策略的控制技术
传统PI电流环控制通常将电流变换到dq坐标系下进行控制,dq坐标系下PI电流环控制原理如图8所示。
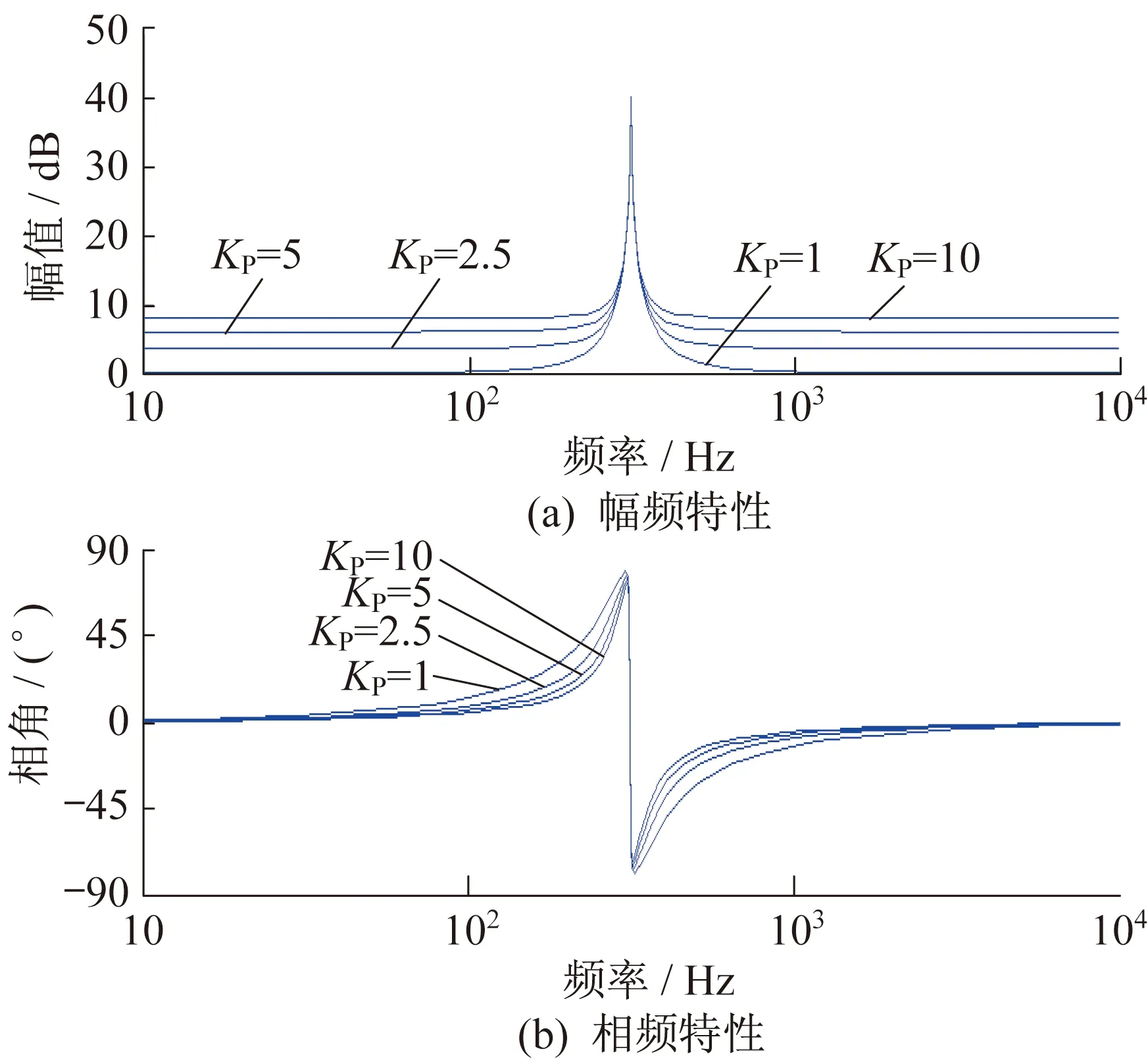
图5 KP变化时MPR控制特性曲线
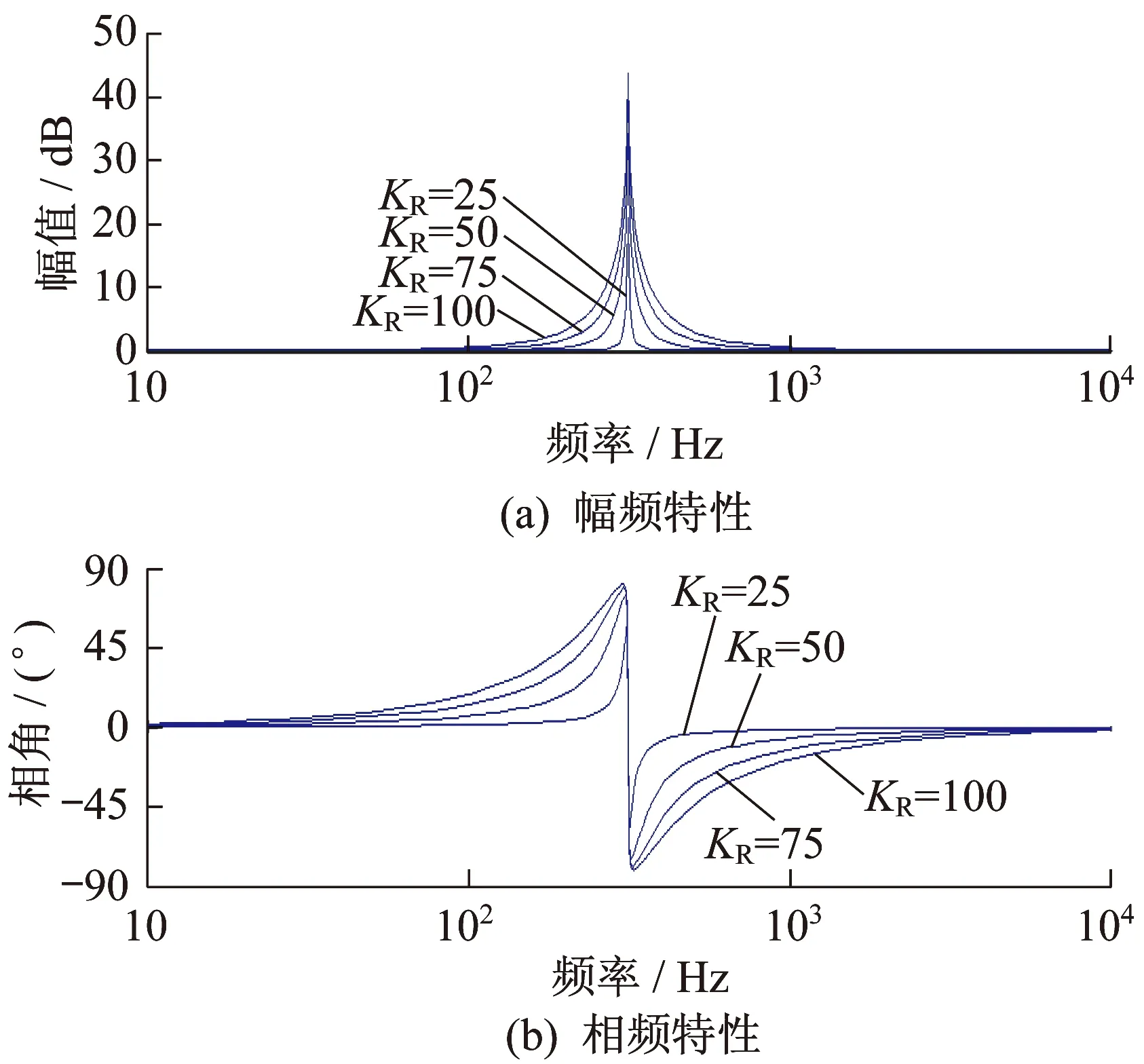
图6 KR变化时MPR控制特性曲线
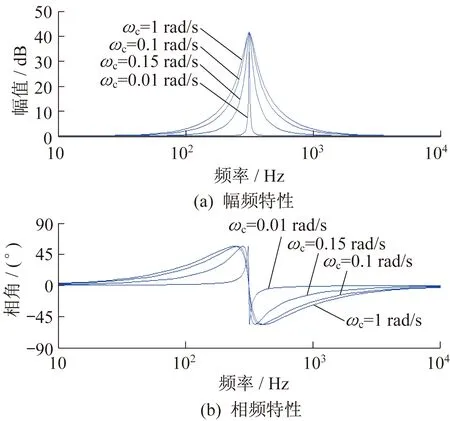
图7 ωc变化时MPR控制特性曲线

图8 dq坐标下PI电流环控制原理
图8中,PI控制的传递函数GPI(s)为:
GPI(s)=KP+KI/s
(4)
并网电流与参考指令电流的误差在αβ坐标系下可以写为eα(t)、eβ(t),经过Park变换可以得到dq坐标系下的误差量,通过PI控制,再经过Park逆变换,最后得到αβ坐标系下的控制信号uα(t)、uβ(t)。
PI电流环控制虽然可以提高系统的动态响应速度,但是对并网电流中存在的低次谐波,尤其是五次、七次谐波,抑制能力较弱,因此,基于PI与MPR策略的光伏发电并网逆变器控制技术既能够提高系统的动态特性,又可以保证并网电流的质量。基于PI与MPR策略的控制技术原理如图9所示。
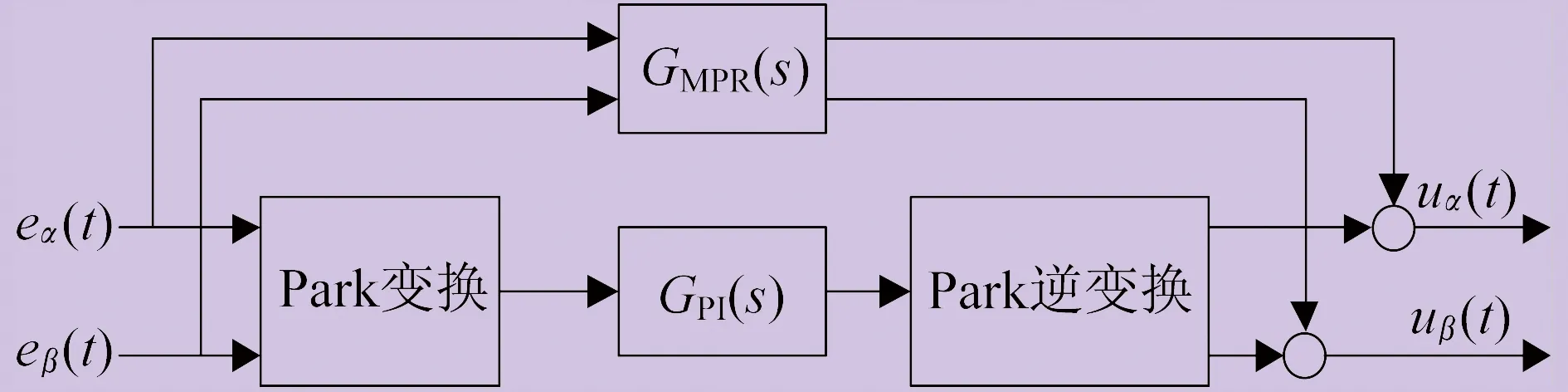
图9 基于PI与MPR策略的控制技术原理
应用基于PI与MPR策略的光伏发电并网逆变器控制技术,由于dq轴下的电流存在相互耦合,耦合项会影响系统的控制性能,因此需要对d轴电流和q轴电流进行解耦处理。引入解耦环节后基于PI与MPR策略的控制技术原理如图10所示。
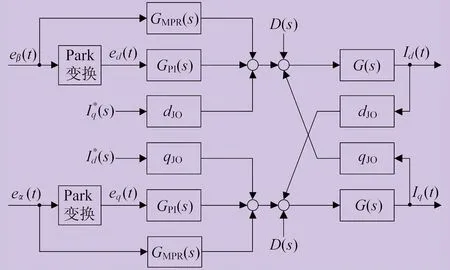
图10 引入解耦环节后基于PI与MPR策略的控制技术原理
dJO=3ωL1I1q-(3ω2L1Cf+1)uCd-(2ωL1+ω3L1CfL2)I2q+ω2L1Cfugd
(5)
qJO=-3ωL1I1d-(3ω2L1Cf+1)uCq-(2ωL1+ω3L1CfL2)I2d+ω2L1Cfugq
(6)
式中:ugd、ugq为并网电压在dq轴下的分量;I1d、I1q为逆变器输出电流在dq轴下的分量;I2d、I2q为并网电流在dq轴下的分量;uCd、uCq为电容电压在dq轴下的分量;Cf为逆变器侧电容;ω为角频率。
逆变器传递函数为:
(7)
PI电流环控制能够实现对直流参考电流的无误差跟踪,MPR控制可以对并网电流中五次、七次等低次谐波进行有效抑制。
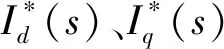
为了验证基于PI与MPR策略控制技术的正确性,分别绘制PI电流环控制和MPR控制下,从参考指令信号到误差信号的脉冲传递函数幅频特性曲线,如图11所示。
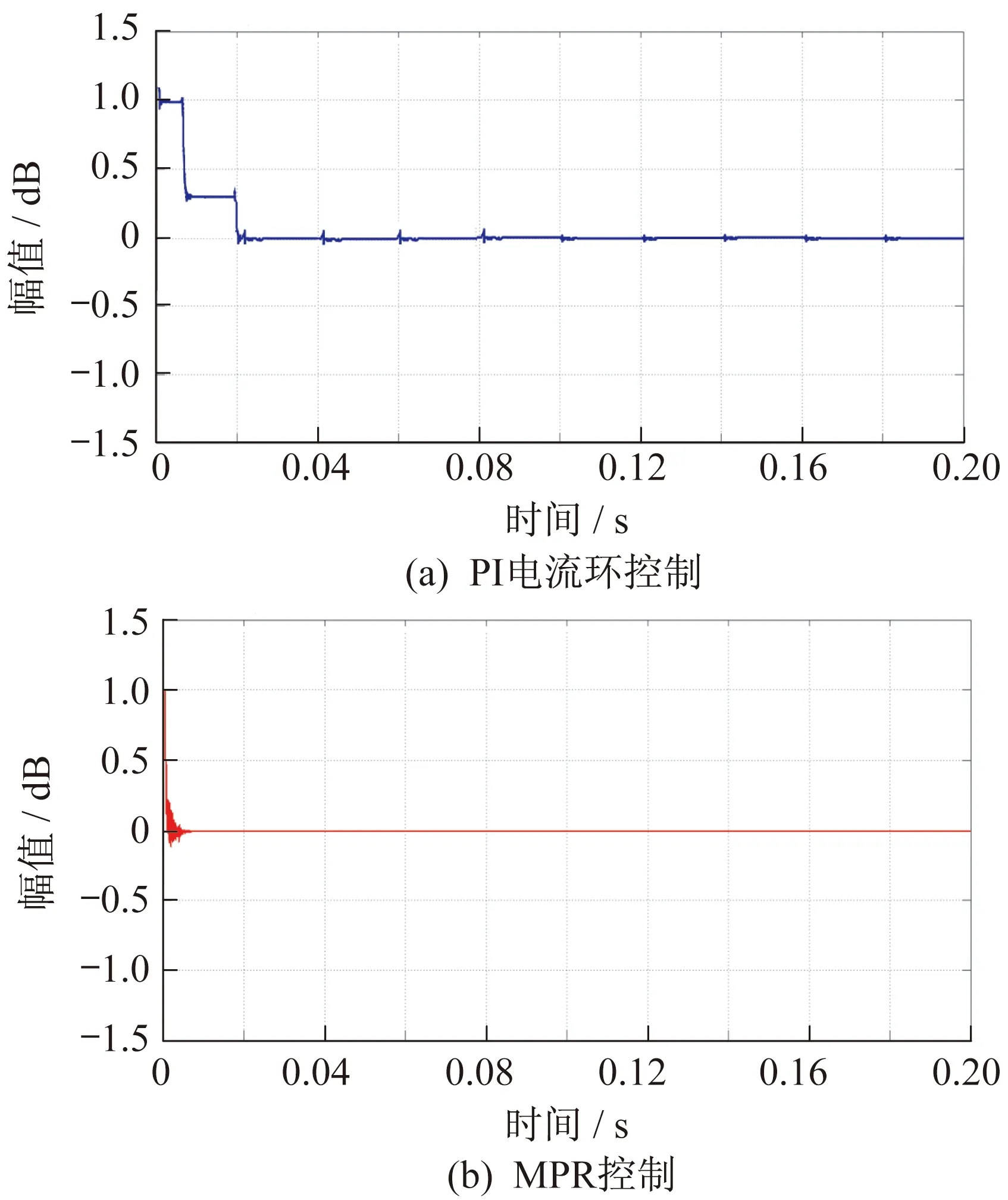
图11 脉冲传递函数幅频特性曲线
由图11可以看出,两种控制的误差在第一个周期内均能够收敛,即两种控制的动态响应时间相同,不存在由于响应时间不同而导致的周期性误差,因此,不需要对相角进行补偿就可以保证并网逆变器系统的稳态控制,由此验证了所提控制技术的正确性。
7 仿真分析
在Matlab/Simulink中搭建LCL型光伏发电并网逆变器仿真模型,设开关频率为10 kHz,Udc为80 V,Cdc为4 700μF,Cf为20μF,L1为5 mH,L2为0.5 mH,C为400μF,为了验证所提控制技术对特定次谐波的抑制能力,在仿真模型中添加5%五次谐波和5%七次谐波,A相并网电流波形如图12所示。
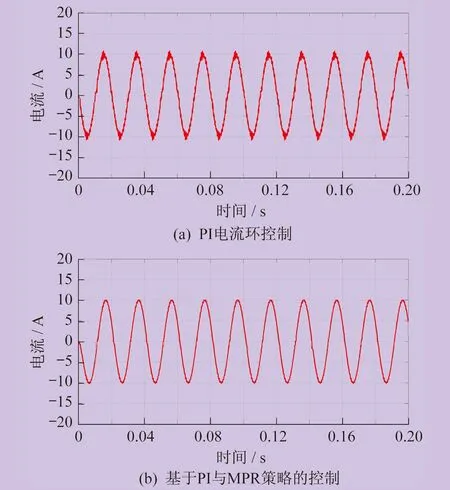
图12 A相并网电流波形
由图12可以看出,当向光伏发电并网逆变器模型中注入五次、七次谐波时,PI电流环控制下A相并网电流波形正弦稳定性较差,且波峰、波谷处纹波较多,并网电能质量较差。采用基于PI与MPR策略的控制技术,A相并网电流波形得到明显改善。
为了具体分析两种控制对五次、七次谐波的抑制能力,对两种控制下的A相并网电流进行谐波电流占比和谐波电流畸变率分析。两种控制下A相并网电流中谐波电流占比如图13所示。
当向并网逆变器模型中加入5%五次谐波和5%七次谐波后,PI电流环控制下A相并网电流基波电流幅值为10.75 A,谐波电流畸变率为5.71%,不能满足谐波电流畸变率小于5%的并网要求。采用基于PI与MPR策略的控制技术,A相并网电流基波电流幅值为10.18 A,谐波电流畸变率为2.03%,满足并网要求,五次和七次谐波得到有效抑制。
图13 A相并网电流谐波电流占比
8 试验分析
为了验证基于PI与MPR策略的光伏发电并网逆变器控制技术是否能够提高系统的动态特性,搭建了LCL型光伏发电并网逆变器试验平台,如图14所示,电路参数与仿真参数相同。

图14 光伏发电并网逆变器试验平台
为了验证基于PI与MPR策略的控制技术对系统动态特性的改善程度,使系统在稳态运行过程中负载参数发生突变,两种控制下A相并网电流的动态试验波形如图15所示。
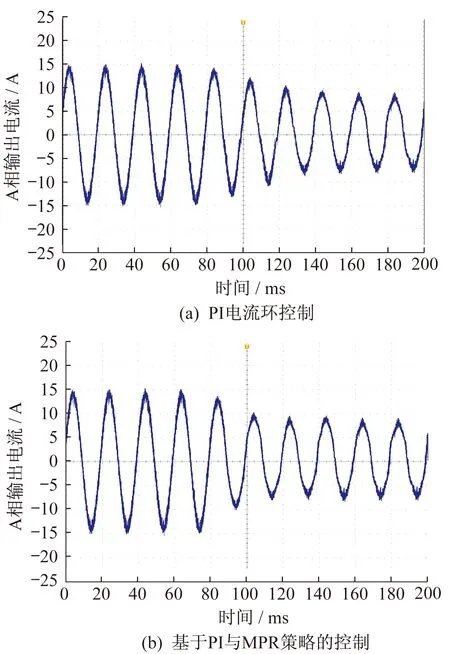
图15 A相并网电流动态试验波形
从图15可以看出,当80 ms负载参数发生突变时,PI电流环控制下光伏发电并网逆变器A相并网电流的调节时间为45 ms。应用基于PI与MPR策略的控制技术,光伏发电并网逆变器A相并网电流的调节时间为30 ms。
由图15可见,基于PI与MPR策略的控制技术可以有效缩短负载突变时系统的调节时间,提高系统的动态特性。
9 结束语
笔者提出基于PI与MPR策略的光伏发电并网逆变器控制技术,经过仿真和试验,确认可以有效抑制并网电流中存在的较为严重的五次、七次等低次谐波,在负载参数发生突变时,能够保证系统具有良好的动态特性,提高系统在负载、线路发生突变时的抗扰动能力。
猜你喜欢
电工技术学报(2022年20期)2022-10-29
农业工程学报(2022年13期)2022-10-09
消费电子(2022年6期)2022-08-25
灌溉排水学报(2022年6期)2022-07-13
云南电力技术(2021年6期)2022-01-18
能源工程(2021年5期)2021-11-20
电子制作(2019年7期)2019-04-25
电子制作(2018年17期)2018-09-28
电子制作(2018年9期)2018-08-04
演艺科技(2017年1期)2017-03-09
