基于权值选择的多雷达多目标检测前跟踪算法
2020-04-08 13:31:24花文号薛安克
杭州电子科技大学学报(自然科学版) 2020年2期
花文号,陈 霄,薛安克
(杭州电子科技大学信息与控制研究所,浙江 杭州 310018)
0 引 言
检测前跟踪(Tracking Before Detection,TBD)对目标运动信息数据进行时间上的能量积累,是一种有效的检测与跟踪微弱目标的方法[1]。目前的检测前跟踪技术主要包括动态规划[2]、Hough变换[3]、基于粒子滤波的检测前跟踪技术(Particle Filter Tracking Before Detection,PF-TBD)[4]等。其中,PF-TBD是一种基于蒙特卡洛实验实现递归的贝叶斯滤波方法,用于解决任何非线性、非高斯问题,并且可接近最优估计,引起国内外研究人员的强烈关注[5-6]。传统的PF-TBD多采用单个传感器对目标进行探测,目前常用的雷达探测系统尤其是预警系统,多采用多雷达联合检测跟踪。S.R.Maskell等[7]使用多部雷达探测和跟踪弱目标,为多雷达分布式探测的研究奠定了基础,S.J.Davey等[8]将PF-TBD拓展至红外和雷达的观测数据。为了提高目标状态的估计精度,龚亚信等[9]提出改进的分布式检测前跟踪算法。同时为了提高检测前跟踪算法的实时性,王娜等[10]将多目标状态的联合检测估计转换为多个独立的单目标检测过程。当某个雷达性能不佳时,基于此雷达量测计算出的粒子权值与其他雷达量测计算出的粒子权值之间差异过大。这些差异较大的粒子权值在融合时会导致融合后的粒子权重过高或者过低,从而造成虚假目标或者目标漏检情况。为此,本文提出一种基于权值选择的多雷达多目标粒子滤波检测前跟踪算法(Weight Selection Particle Filter Tracking Before Detection,WS-PF-TBD),根据不同雷达量测数据得到的同一粒子权重值不同这一特点,对多个雷达的量测数据进行择优选取并融合,从而提高目标检测正确率。
1 目标运动模型与传感器观测模型

目标的运动模型和观测模型描述如下:
Sk+1=f(tk,sk,ck,wk)
(1)
Prob(ck+1=i|ck=j)=[φ(tk)]ij
(2)
zk=h(tk,sk,ck,vk)
(3)

(4)
(5)
(6)
2 基于权值选择的多雷达多目标双层粒子滤波算法
2.1 基于权值选择的多雷达多目标双层粒子滤波算法框架
本文提出的WS-PF-TBD算法采用双层粒子滤波结构,分别使用目标跟踪粒子群和检测粒子群实现已有目标的跟踪和新目标的检测。算法整体框架如图1所示。
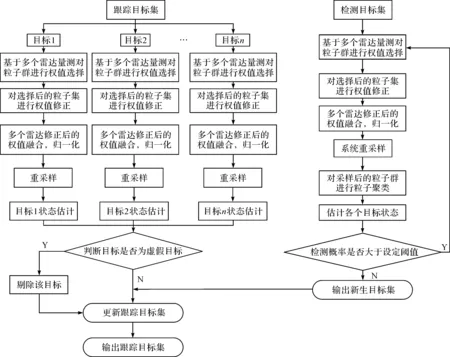
图1 WS-PF-TBD算法整体框架图
2.2 基于权值选择的目标跟踪层
目标跟踪层的主要任务是实现对已有目标的跟踪,并剔除虚假目标点迹。对于k-1时刻的跟踪目标集{S1,k-1,S2,k-1,…,Sm,k-1}中的每一个目标i,本文提出一种粒子权重选择方法。首先,在对粒子进行状态转移以及计算权重之前,对于已跟踪目标集中的每个目标计算其目标权重,通过与设定的标准粒子权重比较,找到能够表征多个雷达中平均跟踪性能的参数;然后,在粒子转移以及计算权重的过程中,使用找到的参数和雷达总数目之间的函数关系对每个粒子权重进行选择,剔除一些无效粒子,发现虚假目标;最后,对选择后的粒子权值进行权值修正,得到第k时刻的跟踪目标集{S1,k,S2,k,…,Sn,k}。对于跟踪目标集中的目标i,采用权值选择思想的具体算法步骤如下:
(1)计算多个传感器的联合平均检测性能。

(7)
其次,计算每个雷达对目标集中的目标的检测性能,设粒子权重阈值为wtra,则目标的检测性能指标γ为:
(8)
式中,wtra范围一般为[200,600],根据信噪比进行按需调整,当γu,i=1时,表示第u个雷达检测到目标i;当γu,i=0时,表示第u个雷达未检测到目标i。
最后,计算传感器联合平均检测性能,联合平均检测性能指标η为:
η=RC
(9)
(2)对粒子群的权值进行选择。

(10)
再次,计算每个雷达对应粒子群中每个粒子的检测效果,粒子的检测性能指标λ为:
(11)
式中,当λu,j=1时,表示雷达u对粒子j检测效果好;当λu,j=0表示雷达u对粒子j检测效果不好。
最后,对粒子j进行第一次权值修正,权值修正指标为μ:
(12)
(13)
(3)对每个雷达对应的粒子权重集进行权重修正。
首先,计算每个雷达对应的权重修正系数,设定h1,h2,h3为权重门限值:
(14)
式中,Wumax为每个雷达对应的粒子权重集合中的最大值;h1,h2,h3为通过信噪比选取合适的门限值。
然后,对粒子子权值进行修正:
(15)
(4)对多个传感器修正后的粒子子权值进行融合。

(16)
权重后归一化,可得:
(17)
(6)计算目标i的检测概率,将虚假目标航迹剔除。
(7)计算目标i在k时刻的状态:
(18)
2.3 基于权值选择的目标检测层
目标检测层的主要任务是及时发现新目标。首先产生一个新的探测粒子群,然后采用2.2节中的方法计算粒子权值,基于粒子权值判断目标是否存在,并判断是否为新生目标。
具体算法步骤如下:
(1)步骤1与2.2节中的步骤1相同。
(2)对粒子群的权重进行选择。首先,对探测粒子群进行状态转移。其次,计算粒子与已检测目标距离,若小于阈值d,则改粒子权值为1。
(3)步骤3—5与2.2节中的步骤3—5相同。
3 仿真分析
为了验证本文WS-PF-TBD算法的性能,使用传统多雷达多目标粒子滤波检测前跟踪算法(Multi-radar Multi-target Particle Filter Tracking Before Detection,MM-PF-TBD)和WS-PF-TBD算法对不同信噪比(Signal to Noise Ratio,SNR)下的目标进行检测跟踪,目标检测效果及跟踪误差(Root Mean Square Error,RMSE)结果如图2所示。

图2 不同信噪比下目标检测效果及RMSE对比
从图2中可以看出:在信噪比较高的12 dB时,MM-PF-TBD算法的虚警率较高,而WS-PF-TBD算法可以及时检测到新目标,同时维持已发现目标的跟踪。信噪比降低后,MM-PF-TBD算法的目标虚警率仍然较高,尽管WS-PF-TBD算法发现新目标有所延迟,但在随后的探测过程中,没有出现目标丢失或者虚警现象。此外,在不同信噪比下,WS-PF-TBD算法的RMSE明显比MM-PF-TBD的RMSE要低。
4 结束语
针对多雷达联合检测跟踪中的雷达量测选择问题,本文提出一种基于权值选择的多雷达多目标粒子滤波检测前跟踪算法。算法提出了一种新的权值选择方法来计算粒子权值,基于不同雷达对上一周期目标的跟踪质量,计算当前周期每个雷达对粒子的权值,放大不同雷达对应同一粒子的权值之间的差别,从而达到选择使用雷达的量测信息的目的,更有效地利用多个雷达量测,改善目标虚警情况。与传统多雷达多目标粒子滤波检测前跟踪算法相比,本文算法能有效剔除虚假目标,提高目标跟踪的精度,同时本文算法也可以用于多雷达单目标粒子滤波检测前跟踪算法。
猜你喜欢
成都信息工程大学学报(2022年3期)2022-07-21 09:35:04
Journal of Palaeogeography(2022年1期)2022-03-25 04:17:00
快乐语文(2021年35期)2022-01-18 06:05:30
沈阳师范大学学报(教育科学版)(2021年2期)2021-02-01 07:00:46
法律方法(2019年4期)2019-11-16 01:07:28
北京航空航天大学学报(2019年9期)2019-10-26 02:30:12
电子测试(2018年11期)2018-06-26 05:56:02
雷达学报(2017年3期)2018-01-19 02:01:27
摄影之友(影像视觉)(2017年1期)2017-07-18 11:12:16
自动化学报(2017年7期)2017-04-18 13:41:02