
编组站提钩自动化智能识别设计
2020-03-31 11:01马玉坤宋海锋
铁道运输与经济 2020年3期
安 迪,马玉坤,宋海锋,李 杨
(1.中国铁道科学研究院 研究生部,北京 100081;2.中国铁道科学研究院集团有限公司 运输及经济研究所,北京 100081;3.北京交通大学 电子信息工程学院,北京 100044;4.沈阳奇辉机器人应用技术有限公司,辽宁 沈阳 110027)
0 引言
近年来,计算机、信息化及人工智能的进步促进了铁路编组站的发展,现代化调车技术装备和先进的信息化系统在众多车站都得到了应用,编组站列车到发作业、车辆信息管理、调度指挥、运输决策可融为一体,使得车辆编组效率显著提高[1]。然而,编组站在车辆解编过程中,提钩作业依旧是由人工完成,存在作业环境差、人员易疲劳、危险系数高等问题,这些问题逐渐成为编组站自动化进程中的短板[2]。
为此,很多专家学者对自动提钩技术开展了研究。日本在20 世纪70 年代研究了一种悬挂式自动提钩设备,在日本奥羽线庭坂站[2]进行了试验,但没有大规模应用;德国在20 世纪90 年代提出了一种自动提钩机器人,设计采用电子传感器与摄像机进行自动提钩作业,但也停留在试验阶段[3];我国很多学者也对自动提钩技术开展过研究,如张所斌[2]、臧立超[3]、章雪岩[4]、马波[5]、董海薇[6]、何霄[7]等,大多集中于整体方案、机械设计、控制结构、过程仿真等方面的研究,对计算机智能识别技术的研究较少,虽取得了一些研究成果,但由于技术难度大、投入经费高等原因,这些成果都没有应用于实际生产。
目前,国内在编组站自动提钩方面的应用仍为空白,尚未形成一种有效的自动提钩系统以替代人工作业,而在自动提钩众多技术节点中,智能识别技术是自动提钩系统难以突破的关键瓶颈之一。智能识别是人工智能的重要分支[8],随着科技发展,特别是深度学习技术的不断成熟,智能识别技术已经广泛应用于各行各业中,为编组站自动提钩技术实现提供了有效支撑。实现编组站提钩自动化智能识别技术的突破,对提高编组站解编效率、提升编组站作业安全性、全面实现我国编组站驼峰自动化具有重要意义。
1 编组站提钩自动化智能识别需求分析
1.1 设计需求
结合国内外编组站提钩自动化研究,针对驼峰提钩作业现场情况,编组站提钩自动化智能识别设计应具有以下特点。
(1)满足不同车钩形式。铁路货车的种类较多,车钩形式也不尽相同。按开启形式划分,车钩可分为上作用式和下作用式2 种,不同车钩的提钩把和钩舌形式不一样,且车辆提钩把的位置也不是固定的[9]。因此,编组站提钩自动化智能识别设计应满足不同车钩形式的解编工作。
(2)保持作业相对稳定。提钩自动化智能识别作业是动态过程,在实际提钩作业中,连接员需要与车辆保持相对静止,整体相对地面运动,同时计算机图像采集也需要一个稳定的工作环境。因此,编组站提钩自动化智能识别设计应保持作业过程中的相对稳定,以确保得到具备识别条件的图像。
(3)适应不同复杂场景。传统图像识别场景一般是单一颜色、同种物体、规则形状、固定不变的简单场景,而编组站提钩自动化智能识别场景中,由于相邻两辆货车的间距比较小,在连接处还设有制动杆、风管路接头、制动踏板等装置,识别场景相对复杂,同时由于提钩作业通常在室外进行,识别场景易受天气影响。因此,编组站提钩自动化智能识别设计应考虑适应不同复杂场景,避免因作业环境导致的智能识别稳定性下降。
(4)匹配其它提钩系统。提钩自动化技术是一整套复杂的系统问题,并非单纯依靠某一个关键点或子系统来解决。编组站提钩自动化智能识别设计需要与整套自动提钩以及其它子系统相匹配,如自动提钩走行系统、机械手臂系统、通信系统、动力系统、控制系统等。
1.2 图像信息处理
(1)位置信息获取。编组站提钩自动化智能识别利用外部触发设备获取待提钩车辆与推峰车组的位置信息,通过两组激光雷达判定车组行进方向,利用车辆间隙进行计数,通过预先设定的钩计划判断待提车辆位置。当待提车辆到来时,触发设备发出信号,启动图像采集设备工作。当判定车组反向行进时,触发设备不工作。
(2)作业过程监控。编组站提钩自动化智能识别采用实时视频监控高清摄像头,对自动提钩作业的全过程进行监控。摄像设备输出的视频便于后台用户观察自动提钩系统外观情况,直观反映作业过程及问题;当夜晚或天气原因导致光线不足时,编组站提钩自动化智能识别照明设备启动,进行暗区补光,确保图像采集获取正确图像信息。
(3)图像数据采集。编组站提钩自动化智能识别采用高清机器人视觉图像处理摄像头,进行待提钩车辆提钩把图像数据采集。通过高清摄像头进行拍摄,将采集到的图像数据转换为数字信息传递至工业计算机储存,再进行计算机的自动识别处理。采集得到的图像数据原图分辨率为4 160×3 120。
(4)信息数据处理。编组站提钩自动化智能识别采用工业计算机作为整套流程的“脑中枢”,进行图像数据交互、数据处理、数据存储、命令发布以及与其它系统的配合联动等等。除此之外,编组站提钩自动化智能识别还利用工业计算机的通信接口从编组站综合自动化系统获取相关解编作业信息。
编组站提钩自动化智能识别设计的图像信息处理结构如图1 所示。
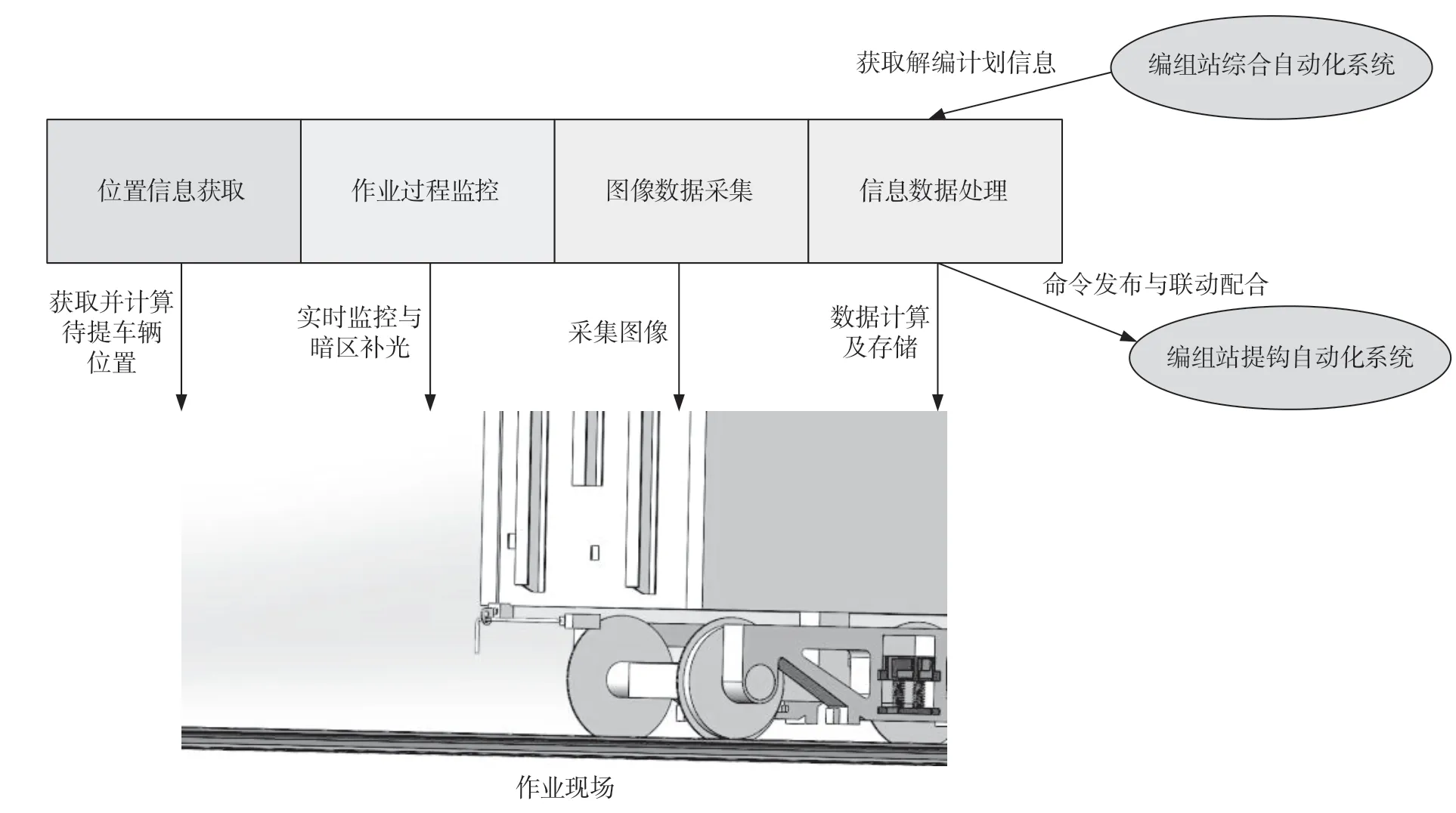
图1 图像信息处理结构Fig.1 Structure of image information processing
1.3 智能识别流程
智能识别技术应用于编组站驼峰解编作业,其工作流程大体可分为图像采集、图像预处理、图像特征值提取及图像匹配识别等过程。智能识别流程如图2 所示。
(1)图像采集。图像采集一般有静态采集和动态采集2 种方式,这2 种方式的差别主要在于是否需要外部触发信号,以及是否需要计算机进行实时图像处理。动态采集方式不需任何外部触发信号,但需要计算机对采集到的图像进行实时动态处理,这种方式占用大量计算机资源,同时算法处理存在延迟,会降低解编作业自动提钩效率。静态采集需要外部触发信号,但算法相对简单,无需占用计算机大量内存,可以更好地满足自动提钩作业需求。因此,选择采用静态图像采集方式完成智能识别研究。当作业开始时,智能识别进行软件初始化,启动摄像设备,摄像设备进行视频流传输,工作人员可以从控制台直接观察到现场情况。当车辆到达时,自动提钩系统获悉其到达讯息,控制器触发图像采集工作。
(2)图像预处理。图像预处理是基于车钩提钩把图像采集结果,对图像进行处理并最终用于图像特征值提取过程,主要包括图片灰度校正、图片噪声过滤、逆光与过曝判断、逆光补偿、过曝补偿等过程。①图片灰度校正是为了使采集到的图像灰度均匀分布,以获得更好的图像视觉效果,便于计算机识别处理[10]。②图片噪声过滤将图像采集得到的车钩提钩把图片可能会因电子干扰、光线变化而产生像素的突变,导致图像中出现假色、粗糙点,这种情况称之为图片噪声。由于图片噪声不能反映原图的真实情况,会对计算机图像识别造成障碍。因此,在智能识别处理前,还应进行图片噪声过滤[11]。③图片逆光、过曝判断与补偿的主要目的是确保图像能够正常用于智能识别,避免出现因光线过强而引起图像失真的情况。逆光、过曝判断采用灰度图像阈值法,这种方法依托灰度图像直方图,通过图像直方图的分布,判断图像是否逆光或过曝[11]。灰度图像直方图用来表示图像每个亮度值出现的频率,由于逆光或过曝图像的灰度直方图分布不均匀,灰度值偏大和偏小的像素点很多,而光线合理的图像,灰度值分布应比较均匀。

图2 智能识别系统流程Fig.2 Workflow of intelligent recognition system
(3)图像特征值提取与匹配。图像特征值提取与匹配识别主要目的是判断图像中的有用特征,将其提取出来,并与数据库中的特征量相比较,当所比较的特征量处于预先设定的相似度阈值内时,便可得到该特征的高度、宽度等数据,从而使提钩自动化系统得到相应信息,完成提钩工作。传统图像识别方法在编组站驼峰这种复杂环境下的应用往往得不到理想效果,特别是遇到大规模数据集、大量复杂识别场景、普通图像特征值无法选取等情况时,还会面临更多问题[12]。在这种情况下,计算机深度学习技术作为近年来的热门方向,是解决此类问题的一种有效尝试。深度学习是通过建立具有阶层结构的人工神经网络,在计算系统中实现人工智能的一种方式,可以通过初始层的低层图像特征值逐步转化为高层特征值,利用简单判别实现智能识别[12-13]。因此,对于编组站提钩自动化研究,基于深度学习的智能识别技术可作为一种实现驼峰自动解编作业的有效手段,同时也是未来智能识别技术在编组站应用的发展方向。
2 编组站提钩自动化智能识别技术实现
2.1 图像预处理技术实现
由前文所述,图像预处理分为图片灰度校正、图片噪声过滤、图片逆光过曝判断补偿3 个步骤。其具体的实现方法如下。
(1)图片灰度校正。图像像素点的颜色可以用RGB 3 个分量进行描述,每个分量的取值范围均为0 ~ 255,设某个像素点坐标为(i,j),RGB 值分别为Ri,j,Gi,j,Bi,j,则经灰度校正后的该点灰度值GV(i,j)值可以经过以下变换得到。

式中:aR,aG,aB为灰度线性校正系数,按经验值可分别取值0.3,0.59,0.11。
在灰度校正过后,图像每个像素点的RGB 值相等。
(2)图片噪声过滤。在智能识别设计中,采用高斯滤波器处理此问题。高斯滤波是通过卷积运算,对图像像素点进行一定邻域像素值进行加权平均。
设图像中某个点坐标为(i,j)的像素点灰度值为GV(i,j),则采用二维高斯函数计算核矩阵维度为k时,此像素点高斯核内元素Hi,j可以表示为

式中:σ为决定宽度的参数。
得到高斯核后,对该点像素值进行归一化,得出的降噪后灰度值GV1(i,j)为

(3)图片逆光、过曝判断与补偿。智能识别设计采用对比度拉伸的方法,利用灰度变换,将降噪处理后的提钩把图像各像素灰度值进行拉伸,在0 ~ 255 区间相对均匀分布。按公式 ⑷ 将像素的灰度值映射到更大的灰度空间。

式中:GV2(i,j)为经过对比度拉伸后的灰度值;GVmax,GVmin分别为图像中灰度最大值和最小值。
2.2 图像特征值提取与图像匹配识别技术实现
智能识别设计采用深度卷积神经网络模型进行图像特征值提取与图像匹配的技术实现。深度卷积神经网络模型[14]进行智能识别训练与分类时,通过局部连接和权值共享以减少训练的参数,深度卷积神经网络结构如图3 所示。经过处理的车钩提钩把图像由最底层输入后,依次传至下一层,每层通过相应的滤波器进行图像特征值提取,最后输出结果。这种技术最重要的特点就是可以自动地从训练样本集中学习图像特征,减少人工设计与干预,并且可从多层的学习模式中发现数据复杂结构,提高图像识别的成功率。

图3 深度卷积神经网络结构Fig.3 Structure of the deep convolution neural network
深度卷积神经网络算法的具体步骤如下。
(1)将图像细化为50×50 像素大小的模块作为输入图像。计算特征聚类矩阵M。M涵盖4 个特征值,可以表示为

式中:Eva{}为聚类计算函数;L为图像宽;H为图像高;P为通道;δ为乘积。
(2)建立卷积层,将输入图像由底层(输入层)传入。对输入层的特征映射进行卷积处理,使图像特征更加明显。对第j层卷积层操作时,第j层的特征映射可以表示为

式中:Yj为第j层的特征映射,表示输出映射;g(x)为激励函数;*为2 维卷积运算符号;Yi为第i层的特征映射,表示输入映射;Kij为卷积核表达式;bj为偏值。
(3)对上述结果进行最大池化操作,建立最大池化层。按下列通识公式计算。
式中:max{}为取最大值计算;s为池化层区域的大小;y i(j,k)为第i个特征映射在(j,k)内的神经元;hi(ϑ)为第i个特征映射位于ϑ的神经元,此处ϑ=j·s+m·k·s+n,此处m,n为神经元在池化区域内的位置偏移量。
(4)设置激励层,再次凸显输入图像的特征。采用ReLu 函数R(x)作为激励函数,当特征值x高于既定标记时给予激励,否则清零。

(5)计算输入图像的训练误差。对于训练过程中存在的误差,采用平法误差法进行处理,则第n个样本的训练误差En表示为

式中:c为输出节点个数;m为循环变量,m= 1,2,…,c;为第m个节点的第n个样本梯度真实值;为第m个节点的第n个样本训练输出层。
(6)对输入图像的误差进行归一化处理。为了使每一层的输入服从相同分布,将En按照公式 ⑽ 进行归一化处理,得到归一化误差为

式中:E(n)为En的平方值;AVE[E(n)]为前n次误差平方的平均值;为标准差。
(7)计算图像特征识别距离。对目标提钩把图像的高H、宽L、通道P、乘积δ进行特征聚类计算,输出特征矩阵M,xi∈M,对特征矩阵M与样本求计算特征识别距离d0(i,j),距离越小,证明特征矩阵M越接近样本,所识别的部分与数据库提钩把学习样本越相近。最终计算的特征识别距离为

式中:α,β,γ,τ为初始化修正参数,为提高识别精度在识别现场对第一次识别进行校正,以消除外界天气因素带来的噪声干扰。
(8)利用图像特征值完成图像匹配识别。根据计算取得的特征识别距离,锁定样本实现对目标提钩位置的识别,完成图像匹配识别。
2.3 实例应用
为验证智能识别的正确性与有效性,定义可靠度r作为评价智能识别可靠性的参数,按公式 ⑿ 计算如下。

式中:nS为识别成功的样本数量;nF为识别失败与漏识别的样本数量。
试验采用平面调机推送的方式,预先将智能识别硬件设备搭建于某编组站内,随机选取不同车型进行编组,在晴朗日间(光照强度在10 000 ~ 80 000 lx 区间范围内)、阴天日间(光照强度在200 ~ 20 000 lx 区间范围内)、晴朗夜间(利用照明灯,光照强度在75 lx 左右)进行。根据试验周期,将数据分为3 组,共得到图片样本8 439 个,试验结果如表1 所示。

表1 试验结果Tab.1 Test results
根据试验情况来看,试验样本共8 439 个,识别成功样本数量共8 388 个,识别失败与漏识别样本数量共51 个,智能识别方案在试验中的平均可靠度达99.37%。试验中,未发现智能识别过程在晴朗日间、阴天日间与晴朗夜间正常光照强度下的明显差异。
经分析,智能识别算法产生识别失败情况的原因主要有2 点。一是由于图像样本中,车身外侧存在类似提钩把形状的部件,如转向架摇枕边框、承载鞍间隙、部分车辆制动管、侧面爬梯、扶手等装置,这些装置可能会导致智能识别误判。二是由于车辆提钩把形变过大,或是提钩把上包缠铁丝、铁链等装置,导致智能识别漏判。
3 结束语
铁路编组站解编作业是运输生产的重要环节,也是编组站无法实现全面自动化作业的主要瓶颈。新时代科技强国、交通强国的宗旨对智能铁路不断提出新的要求,而铁路编组站解编自动化技术作为智能铁路重要的支撑,不仅紧密贴合铁路发展需要,同时可以有效解决现场作业中存在的作业环境差、人员易疲劳、危险系数高等问题,显著提高驼峰解编效率。结合图像识别与深度学习技术,设计铁路编组站提钩自动化智能识别方案,并进行应用和结果验证,试验中的方案平均可靠度达99.37%,为今后提钩自动化技术的深化研究提供了一定的理论与技术支撑。为确保智能识别方案可靠性达到最优,还需要进步进行试验与研究实现不断改进。
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
网络安全与数据管理(2022年3期)2022-05-23
北京航空航天大学学报(2021年9期)2021-11-02
烟台大学学报(自然科学与工程版)(2021年1期)2021-03-19
天津医科大学学报(2021年1期)2021-01-26
烟台大学学报(自然科学与工程版)(2020年1期)2020-02-08
中国信息技术教育(2020年2期)2020-02-02
电子制作(2019年13期)2020-01-14
电子制作(2019年11期)2019-07-04
北京航空航天大学学报(2018年1期)2018-04-20
