WSNs中基于无人机的数据收集算法*
2020-03-29 14:00冯梦清
弹箭与制导学报 2020年6期
冯梦清
(郑州工业应用技术学院信息工程学院, 郑州 451150)
0 引言
无线传感网络[1-2]由多个微型、低功耗的传感节点组成,通过将这些传感节点部署于兴趣区域,监测异常事件或感测区域环境数据。一旦获取了数据,节点将这些数据传输至信宿(base station,BS)。
一般而言,节点大都是由电池供电。当电池用尽,通常不便于给节点替换电池;而一旦电量用尽,节点就无法继续工作,限制了WSNs寿命。因此,有效地利用节点能量[2-3],提高能量效率是延长网络寿命的关键。
近期,基于UAV的WSNs系统受到广泛关注。将UAV作为移动信宿,存在多个优势:1)UAV处于上空,使节点至UAV的链路容易形成视距环境; 2)由于UAV可以移动,可以缩短节点向信宿传输路径,有利于减少能量消耗[4]。在UAV-WSNs中,引用休眠和活动机制能够进一步减少节点能耗[5]。节点默认为休眠状态,当收到来自高于预定阈值的beacon信号就进入活动状态。完成了工作后,仍进入休眠状态。然而,在UAV-WSNs中,由于传感节点与移动UAV间的无线信道呈动态变化,降低了数据包传递率[6]。据此,应合适地部署UAV,使处于活动状态的节点能够以高的数据包传递率传输数据。
为此,针对UAV-WSNs网络,提出基于旋转角度多址接入的数据收集(RADM-DC)算法。RADM-DC算法通过给UAV-BS安装天线阵列,形成扇形覆盖区域,并旋转,进而形成多个虚拟扇形。同时,依据节点的信道条件,动态调整节点发射功率。最后,通过实验分析了RADM-DC算法在降低能耗、控制数据传输时延方面的性能。
1 RADM-DC算法
1.1 约束条件
考虑基于UAV-BS的WSNs系统,如图1所示。UAV收集网络内传感节点数据。N个节点分布监测区域l1×l2内。令节点集ψ={S1,S2,…,SN}。用矢量wk=(xk,yk)表示第k个节点Sk的位置,且k=1,2,…,N。
传感节点引用全向天线收发数据。同时,引用文献[5]的节点休眠和活动机制。节点默认为休眠状态,当从UAV接收的信号高于预定阈值,节点就进入活动状态,成为活动节点。如图1所示,将UAV-BS覆盖的区域划分为多个虚拟的扇形区域。UAV-BS旋转其覆盖角度。在其覆盖内的节点,它就将数据传输至UAV-BS,否则节点就保持休眠状态。

图1 虚拟的扇形区域
1.2 信道模型
用自由空间的路径损耗模型表述传感节点与UAV间通信。令Lk表示传感节点Sk与UAV间的通信链路模型:
(1)
式中:fc为载波频率,单位为Hz;c为光速,单位m/s;dk表示节点Sk与UAV间的距离,其表达式为:
(2)
式中:wUAV、HUAV分别表示UAV的二维空间位置、高度。令ψk表示正态对数分布的衰落[7],其定义为:
(3)


图2 UAV与节点间的空间示意图
UAV装备了均匀的线性天线阵列,天线数为m。天线间的间隔为Δ。依据式(4),可计算来自节点Sk传输的信号的天线增益GR,k:
(4)
式中:φk表示信号到达方向(direction of arrival, DoA)[8]。而g(θk,φk)表示单付天线的天线指向性,其定义如式(5)所示:
(5)
由式(5)可知,当θk=π/2时,g(θk,φk)值最大。但是,实际环境中无法满足θk=π/2。为此,给单付天线设置一定的倾斜角θtilt。
(6)
将式(6)代入式(4)和式(5)可得:
(7)
(8)
最后,依据式(9)计算UAV与节点间信道增益hk为:
(9)
式中:GT表示节点Sk的发射天线增益,而ψk=10φk,dB/10。
1.3 UAV旋转角度
为了使网络内所有节点能获取给UAV传输数据的机会,UAV以旋转角度θRT∈{0,2π}将整个区域划分为多个虚拟的扇形区。在每个扇形区持续的时间Tsec为:
(10)
式中:TRound表示每一轮时延,即UAV旋转一周所持续的时间;J=2π/θRT为扇形数。
Tsec对系统性能有重要影响。若Tsec过长,则该扇形区内的节点向UAV传输数据的概率就增加[9]。但这必然延长了不在该扇形区节点向UAV传输数据的时延。不采用固定的Tsec,而是依据扇形内节点密度调整时间。即节点密度越高,时间就越长,反之,就缩短时间,如式(11)所示:
(11)
式中:Tsec,j表示UAV在第j个虚拟扇形区停留的时间;Mj表示第j个虚拟扇形区内的节点数。
采用虚拟扇形区域,降低了多个传感节点同时传输数据包的传递率。此外,相比于整个通信区域,虚拟扇形区更窄,这就提高了每个活动节点检测周围节点传输数据的概率[10]。原因在于:在更窄区域,节点相距更近,更容易检测。此外,UAV采用天线阵列,增加了活动节点所接收的功率强度,使得节点能够在短时间内完成数据包的传输。
1.4 基于信噪比的传输速率调整
为了能有效控制干扰,依据信道条件对传输速率进行调整。令γk表示UAV接收节点Sk传输的信号的信噪比为:
(12)
式中:PR,k为接收功率;N0为噪声功率密度;B为带宽;PT为节点的发射功率。
由式(12)可知,相比于全向天线,采用天线阵列时,接收天线增益GR,k越大,信噪比γk就越大。采用IEEE 802.11g作为无线接入协议,每个传感节点依据信道条件调整数据传输速率。当γk较大,就适当增加传输速率。具体的调整策略如表1所示。

表1 基于γk的传输速率调整
从表1可知,γk的最小值为4 dB。因此,当γk值低于4 dB时,即使节点处于活动状态,也认为该节点无法传输数据,即链路中断。
2 性能仿真
2.1 仿真环境
利用NS2++软件建立仿真平台。30个传感节点分布于60 m×60 m的方形区域。UAV位于方形区域正上空,且高度为20 m。传感节点引用IEEE 802.11g协议接入无线资源。仿真参数如表2所示。此外,为了验证提出RADM-DC算法的有效性,仿真过程中将旋转角θRT分别设置为60°和120°。
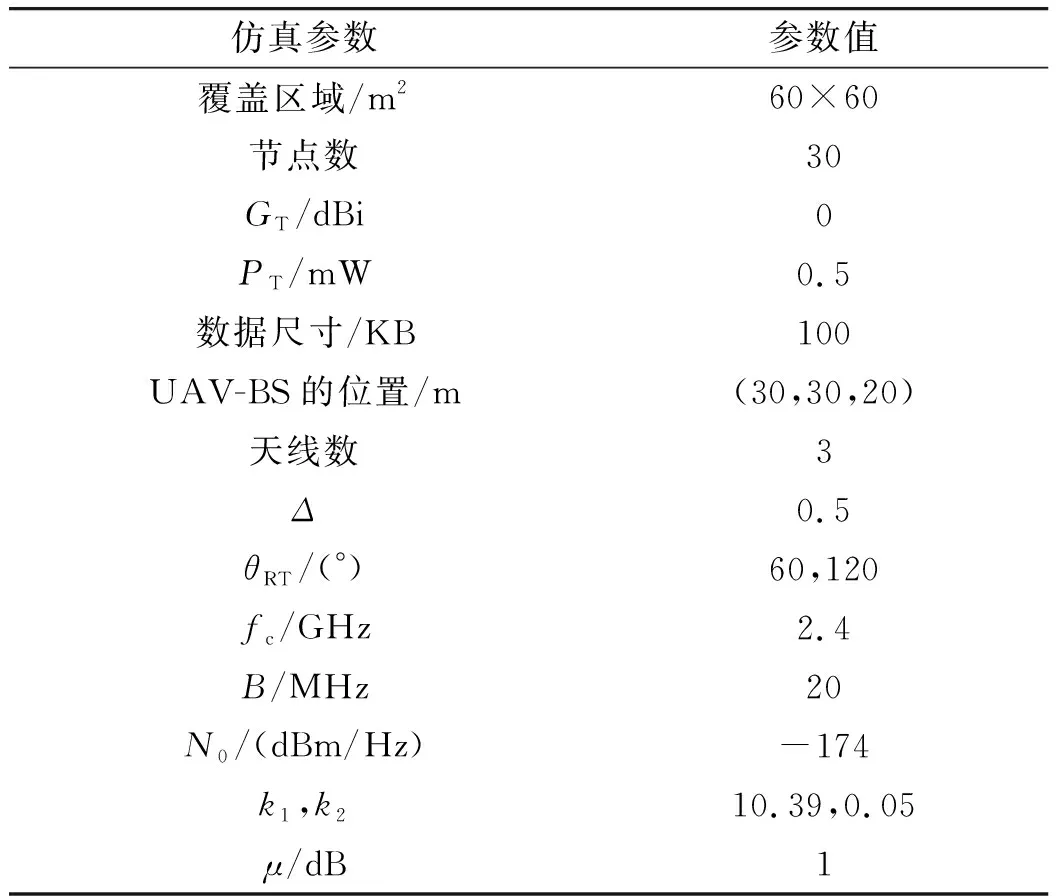
表2 仿真参数
2.2 数据分析
2.2.1 中断概率
下面分析UAV的角度θRT对中断概率影响。当γk值低于4 dB,就认为链路中断。中断概率等于发生中断的节点数与总的节点数之比。

图3 平均中断概率与θRT关系
图3描述了角度θRT对中断概率的影响。从图3可知,当θRT=60°,中断概率为零。原因在于:当θRT=60°,节点能够获取高的天线增益,进而获取高的γk值。然而,当θRT增加至120°时,中断概率迅速增加至10%。原因在于:角度越大,节点获取的天线增益下降,致使部分节点的γk过低。
2.2.2 平均碰撞帧数
进一步分析角度θRT对节点传输数据的影响。用每个节点发生帧碰撞的平均次数(平均碰撞帧数)反映θRT对节点传输数据的影响。
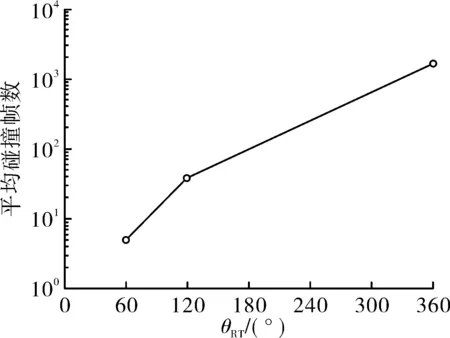
图4 平均碰撞帧数与θRT的关系
如图4所示,RADM-DC算法通过在特定时间内限制通信的节点数,进而控制平均碰撞帧数。θRT越小,每个虚拟区内已有的活动节点数就越少。信道干扰也就越小,节点获取的γk值就增加。因此,θRT=60°的性能优于θRT=120°的性能。
2.2.3 平均传输时间
分析θRT对节点传输数据的时间影响,并重点分析Tsec,j对平均传输时间的影响。RADM-DC算法是对Tsec,j依据扇形内节点数进行调整,而传统算法是采用固定Tsec,j值。为了更好体现采用动态Tsec,j的优势,将动态Tsec,j与固定Tsec,j进行比较。
如图5所示,平均传输时间包括了节点的等待时间。从图5可知,相比于固定Tsec,j,动态Tsec,j策略下能够控制平均传输时间。此外,当θRT较低时,扇形区域内活动节点数获取的γk更大,增加了传输速率,进而缩短了传输时间。当θRT为60°或120°时,RADM-DC算法能够有效控制传输时间。

图5 平均传输时间与θRT的关系
2.2.4 平均节点能耗
最后,分析节点传输数据时所消耗的能量。如图6所示。平均节点能耗是指节点传输数据时所消耗的平均能量。从图6可知,θRT越大,平均节点能耗越大。原因在于:θRT越大,中断概率越高(如图4所示),这就使得节点需多次传输才能完成数据包的传输,最终增加了节点能耗。

图6 平均节点能耗与θRT的关系
3 结论
文中提出了多址接入的RADM-DC算法。该算法将整个区域划分为多个虚拟扇形,降低了随机接入UAV-BS的活动节点数,进而避免了信号碰撞。由于天线增益增加,降低节点数据传输的中断概率。并依据信道条件,调整传输速率,缩短了数据传输时间,最终降低了节点能耗。仿真结果表明,当旋转角度为60°时,RADM-DC算法将中断概率控制为零,提高了通信效率,降低了节点能耗。
猜你喜欢
传感技术学报(2022年7期)2022-10-19
今日农业(2022年15期)2022-09-20
小学生学习指导(高年级)(2021年11期)2021-11-30
学校教育研究(2021年11期)2021-07-22
中国计算机报(2020年15期)2020-05-13
分析化学(2017年12期)2017-12-25
分析化学(2017年12期)2017-12-25
绿色科技(2017年2期)2017-03-23
小学生导刊(低年级)(2016年10期)2016-10-13
CHIP新电脑(2016年9期)2016-09-21