基于自动导航技术的小型履带拖拉机虚拟转角研究
2020-03-26 01:57:32李军辉刁维芹
安徽电子信息职业技术学院学报 2020年1期
李军辉, 刁维芹
(北京农业职业学院,北京 102208)
一、引言
乡村振兴需要农业装备现代化,在农业4.0背景下,农业生产需要降低生产消耗,提高作物品质,降低劳动强度,提高生产效率,农机的自动驾驶技术是一项重要的关键技术,主要的实现方式有视觉导航、信标导航和卫星导航等方式。卫星导航具有精度高、适应性好,全天候工作等特点,在新疆和东北大田作业生产已经有了一定的推广和应用。
农机自动驾驶通过拖拉机上加装自动导航系统实现,目前主流的导航系统都兼容北斗自动定位服务,主要有美国天宝(Trimble)的Autopilot系统,约翰迪尔(John Deere)的Auto Trac系统;国内有上海司南的 Auto Farm 系统,广州中海达的I Farm系统,北京合众思壮的壁虎和慧农导航系统,北京农业智能装备技术研究中心的 Auto Guide 导航系统[1]。
以上导航系统针对轮式拖拉机转向系统进行改造,通过拖拉机前轮转向角为控制对象,加装方向传感器、导航控制器、液压控制器或方向盘控制器等实现自动导航驾驶。履带式拖拉机作为农用机械中的一个重要部分,因转向机制不同,目前产品化的农机自动导航系统在履带车上缺乏研究应用,尤其是采用单侧制动转型的小型履带拖拉机。本文以小型履带式果园用的拖拉机为研究对象,以在该类车辆加装自动导航系统为目标,分析履带式车辆的转向模型,研究转向中履带车辆两侧履带轮速度与轮式车辆前轮转向角的关系,提出以履带平均卷绕速度来代替单侧速度,模拟履带车辆转向过程中对应的虚拟转向角和虚拟驱动速度,并对曲线转向过程仿真验证。
二、自动导航技术的研究现状
2004 年,日本 yoshisda 等人采用全球卫星导航系统(GPS)与陀螺仪(FOG)结合,基于 PH-69型插秧机为试验平台,采用车辆动力学模型和 PID算法控制方法来实现插秧机自动导航驾驶。试验表明,拖拉机速度为 0.7m/s 时的路径跟踪最大横向误差为 12cm[2]。
2016年,黎永健,赵祚喜等,以东方红-X804 型拖拉机为研究平台。控制算法是以角速度控制为内环、转向角度控制为外环的双闭环 PID控制算法,执行机构是在原有的液压油路上并联了换向电磁阀和溢流阀等来执行自动转向。上位机与下位机利用 CAN 总线通信,试验结果表明:在直线路面上平均位置偏差小于 3cm,曲线路面跟踪平均位置偏差小于 2cm[3]。
中国农业大学的毛恩荣教授团队先后以铁牛654型号拖拉机和雷沃TG1254拖拉机为研究平台,进行了自动转向系统的电液改造,采用GPS、电子罗盘、陀螺仪、单目摄像机等定位传感器,对定位算法和导航控制算法进行了研究,实现了拖拉机基本的自动导航。中国农业大学的纪朝凤教授团队设计了一套由GPS接收模块、显示控制终端模块、前轮转角传感器、航向传感器及自动转向控制器等组成的农用车辆自动导航控制系统[4]。华南农业大学的罗锡文院士团队以东方红X-804拖拉机为研究平台开发了基于RTK-DGPS定位系统的自动导航控制系统,包括电控液压转向装置、转向控制器、导航控制器等,在拖拉机运动学模型与转向操纵控制模型相融合基础上,推导出直线跟踪导航控制系统状态方程,并提出跨行地头转向控制方法[5]。北京理工大学的教研团队以履带式拖拉机为实验平台,研究出可用于遥控驾驶的液压伺服驱动转向控制系统。该转向系统的改造在原车转向机构上进行,通过增加电液控制系统、伺服阀等,使履带式拖拉机实现遥控控制的自动驾驶[6]。
三、履带车辆的转向的理论分析
(一)研究对象转向原理分析
多功能果园管理机是一种小型履带拖拉机,可进行旋耕、割草、施肥、打药、开沟、起垄等多种作业。动力系统为单缸水冷柴油机,动力传动方式齿轮传动,履带式行走,行走直线性和通过性好,转向通过电磁阀总成控制左右转向液压缸,采用对单侧驱动轮制动方式实现转向,可原地转向。转向控制原理如图1所示。
从图1可看出,履带拖拉机转向机构比较简单,方向拨杆拨向左侧转向时,电磁阀启动左侧转向液压缸,左侧嵌式离合器分离并制动左半轴,左侧履带停止转动,右侧履带继续转动,实现左转;当方向拨杆在右转向时,电磁阀启动右转向液压缸,右侧牙嵌式离合器分离并制动右半轴,左侧履带继续转动,实现左转。转向控制系统实物如图2所示。

图1 玛斯特履带拖拉机液压转向原理图

图2 履带遥控拖拉机转向机构实物
(二)拖拉机导航系统分析
在拖拉机自动导航系统中,GNSS 接收机和天线用于采集农机位置信息,姿态传感器用于GNSS定位信息的补偿;角度传感器用于采集前轮转角数据并传输给单片机; GNSS位置信息、姿态信息和单片机等采集到的信息均通过串口与车载计算机相连,计算机处理数据并生成相应的控制决策;单片机接收到控制策略,通过发送脉冲信号控制拖拉机的转向系统,可以通过电动机转动带动方向盘,实现对方向盘的控制转向;也可控制拖拉机的液压转向系统控制拖拉机的转向,从而实现拖拉机自动导航作业。拖拉机自动导航控制原理如图3所示。
拖拉机自动导航系统的过程中,导航控制器利用GNSS定位系统、车身传感器确定拖拉机的精确位置、车身姿态,判定与目标路径的位置偏差和航向偏差,按照导航控制策略,以拖拉机的前轮转角和速度作为控制变量和反馈变量,使拖拉机按照目标路径行驶。在这个过程中,四轮拖拉机运动由以下参数表示,农机中心(x,y)、当前的航向角φ(°)、转向轮的转角δ(°)和当前的速度矢量u(m/s)。其中行驶速度u和前轮转角等作为控制变量。对于履带式拖拉机其转向原理和控制机构不同,加装自动导航系统需要一些处理。

图3 拖拉机自动导航原理
(三)履带式车辆的转向原理分析
在理想状态下,若履带车辆两侧驱动轮的卷绕角速度分别是ω1, ω2,驱动轮的节圆半径为r,转向过程如图4所示,则两侧履带线速度分别是:

图4 履带车辆转向过程
履带车辆的转向角速度ω为:
分析转向过程,拖拉机两侧驱轮的角速度差值ω2-ω1越大,拖拉机的转向角速度ω越大,转向半径R小。履带拖拉机转向运动图如图5所示。
在履带车辆实际转向过程中还要考虑两侧履带的滑转和滑移,做以下假定,则履带拖拉机转向模型为:
1.履带拖拉机质心在车辆平面几何中心。
2.履带拖拉机为低速均匀转向,不计离心力和转向角速度变化。
3.车辆行驶阻力系数不变。
4.不计履带宽度影响。

图5 履带拖拉机转向运动图
转向半径和车身横摆角速度为:

式中:
L— 履带接地端长度,m
B— 履带间距,m
v1, v2—左右履带的卷绕速度,m/s
A1, A2—左右侧履带的转向极横向偏移量,m
(四)虚拟转角模型分析
履带拖拉机加装自动导航系统,关键是将以上履带拖拉机的转向变量与自动导航系统控制目标控制量关联辆前轮虚拟转角相关联,根据文献[7]付拓、文华等提出的履带虚拟转角模型:

在前面两个转化模型中,对履带车辆转向半径决定于两侧车轮的速度差外,还取决于车辆的结构参数和路面情况。多数履带拖拉机转向机制是通过转向离合器分离程度,形成两侧的履带不同速度差,从而实现不同转弯半径的转弯。应用模型1、模型2,可以计算出履带车辆的虚拟转角和驱速度相互转化,可以按照以上模型进行自动导航系统的改装。但是在玛斯特等小型履带拖拉机在转向过程,其装配的牙嵌式离合器完全分离,转向侧履带完全制动,此时其速度为0,转弯半径或者虚拟前轮转角为固定值,不能形成不同的速度差,完成不同转弯半径的转弯。研究如何控制该类拖拉机的不同转弯半径的行驶,参考手动操作的转弯模式,转弯过程实际分为转弯和直线行驶两个过程,在应用两个转换模型时,引入单侧平均速度来代替速度v ,当左转时,内侧车轮的=该侧驱动轮卷绕履带长度/外侧驱动轮卷绕1周的时间来表示,计算相关的转弯半径和虚拟前轮转角,上传导航控制器。
四、农机虚拟转角系统的测量设计
(一)履带转速的测量
根据履带拖拉机的工作情况和结构,采用霍尔传感器,测量履带驱动轮的卷绕速度,霍尔传感器安装在履带车辆的主动导轮上,安装位置如图6所示。转速传感器将驱动轮卷绕速度信号上传控制器,控制器计算出卷绕速度。

图6 传感器安装位置和配置示意图
(二)卷绕速度平均速度的计算
履带拖拉机转向时,计算驱动轮旋转一周,查阅资料玛斯特履带拖拉机的驱动轮为16齿,即驱动齿轮旋转一周输出16个矩形波。当拖拉机左转时,若左侧制动4个矩形波,此时,左侧驱动轮的速度为3/4 v1。同理可计算右侧平均速度。
(三)拖拉机导航路径的分析
导航系统导航路径分为直线导航、转向曲线导航。直线导航是基于农机运动学模型的导航路径跟踪控制方法,主要是A-B 直线导航的技术。在导航开始之前,首先指定A、B两点的GPS坐标位置,设定直线A-B 为导航基准线。在整个作业过程中,自动导航系统完成一系列与A-B 线平行的路径跟踪。
转向曲线导航控制技术比较复杂,常见的转弯方式弓形转弯、半圆形转弯和梨形转弯[8]。 以预瞄追踪模型为例,农机驾驶员在进行路径跟踪时的转向操作规律,目标是使农机的运动尽可能地与设定的轨迹一致[9]。 在基于预瞄点搜索的纯追踪模型中,首先根据车辆行驶速度确定预瞄点位置,得到车辆到达指定位置的圆弧段路径,并由运动学模型计算车辆的控制转角。
五、运动仿真分析
根据以上对履带拖拉机的转向理论和导航路径的分析,分析履带拖拉机曲线运动控制。
(一)理论虚拟前轮转角的分析
设拖拉机目标导航路径的曲线为f(x,y)=0,根据运动特性,此曲线为连续可微的。此时目标转弯半径的曲率为R作为目标半径。按照中性转向,此时的目标转角。实际拖拉机导航系统给出拖拉机的的虚拟转向角。根据转弯模型1,2,可以计算虚拟的转角和拖拉机速度作为导航系统的目标控制变量。
(二)拖拉机的基本参数:
以洛阳玛斯特遥控履带拖拉机为仿真对象,具体参数如表1所示:
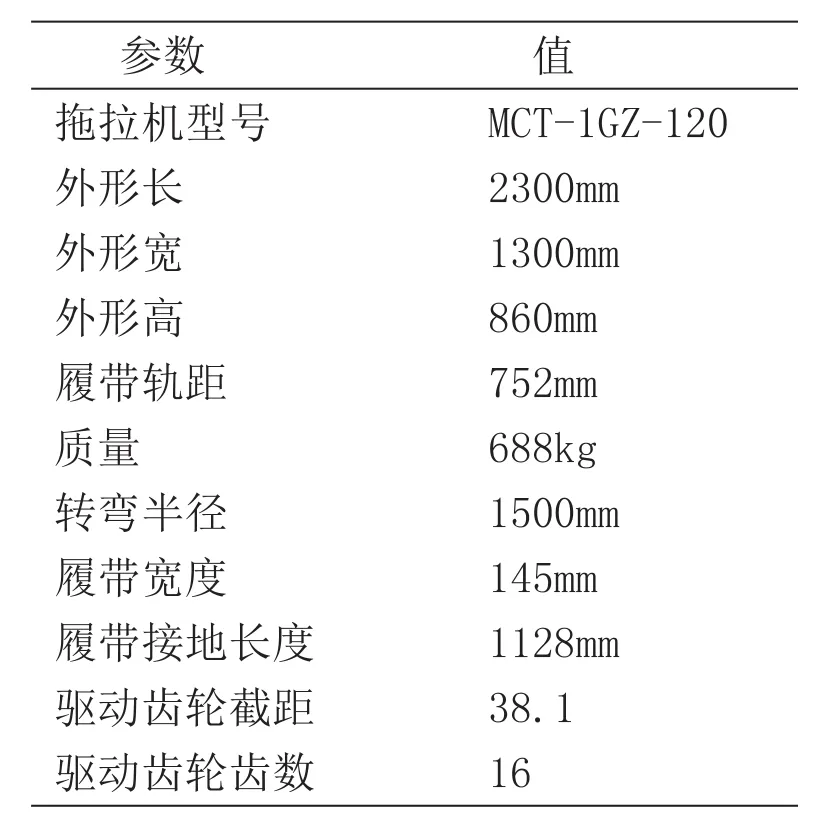
表1 玛斯特遥控履带拖拉机参数
(三)建立仿真模型
为简单起见,以农机半圆转弯为例,假设农机目行驶路径为(x-)2+(y-b)2=R2的圆,根据履带车辆的转弯半径计算公式: 若


图7 转弯半径,行驶速度对平均速度的影响
从图7中可以看出,转弯半径在10m以上时,转弯内侧的平均速度和外侧速度比较接近,当转弯半径比较小时,单侧平均速度和行驶速度在低速时,变化较慢,高速度时,变化较快。
(四)基于路径跟踪的平均速度虚拟转向角跟踪效果的仿真
单侧卷绕速度取v=2, 2.5, 3时,路径追踪按照(x-a)2+(y-b)2=R2的圆上的某一段圆弧进行仿真研究,根据拖拉机工作的情况转弯半径按照R=5,8,10。按照理想状态下,拖拉机的质心在圆弧上运动,按照平均速度的原理进行仿真。
实际履带拖拉机实际转弯分为两个过程,直线行使过程和转向过成两部分。在直线行驶过程中,按照以下算法进行仿真 line(x, y,θ)表示,运动时长为t=(/v)*(s/v),s为驱动齿轮分度圆周长,此时履带拖拉机质心的运动规律为:

V 为履带卷绕速度,t,为直线行驶时间,θ为车身每次旋转的角度。
转向过程为车辆绕旋转中心做半径为B/2+a1的圆周运动,运动时间为t= (1-/v)*(s/v)。此时履带拖拉机质心的运动规律为:

按照以上规律,在MatLab 上对转弯过程进行仿真,运动轨迹图象如图8所示。

图8 利用平均速度仿真不同转弯半径的图像
六、结语
从仿真结果可以看出,按照虚拟转角计算方法,在每个过程中,利用平均速度带入控制策略中是可行的,仿真算法有效。该方法可用于自动导航拖拉机自动导航控制器的前轮虚拟转角的计算中。
猜你喜欢
中学生数理化·八年级物理人教版(2023年4期)2023-05-05 07:29:32
汽车实用技术(2022年5期)2022-04-02 09:36:40
汽车实用技术(2022年5期)2022-04-02 09:36:20
装备制造技术(2021年4期)2021-08-05 07:39:40
中国石油石化(2021年8期)2021-03-30 12:39:14
装备制造技术(2020年9期)2021-01-26 00:15:08
中国新技术新产品(2020年4期)2020-05-05 15:49:48
石油化工建设(2019年6期)2020-01-16 08:03:42
红蜻蜓·低年级(2015年11期)2016-02-02 11:04:45
橡胶工业(2015年4期)2015-02-23 23:29:38