新型航空集群编队飞行空间对准控制方法
2020-03-26 05:56任宝祥梁晓龙吴贤宁
空军工程大学学报 2020年6期
任宝祥, 王 瑾, 李 哲, 梁晓龙, 吴贤宁, 褚 鹏, 李 泽
(1.空军工程大学空管领航学院, 西安, 710051; 2.陕西省电子信息系统综合集成重点实验室,西安, 710051; 3.西京学院, 西安, 710023)
随着军事需求不断变化和科学技术不断发展,单一作战平台性能不能满足未来作战需求,世界主要军事强国的空战理念逐渐向体系化、信息化、智能化、协同化方向转变。近年来美军提出的“分布式作战”“马赛克战”“多域战”等新型作战概念,皆强调战场中海陆空天各类作战平台密切协同的重要性,从而形成作战体系整体的态势感知优势、指挥决策优势、精确打击优势,以高效完成作战任务,这同时也是航空集群作战的基本思想。航空集群是由一定数量的单功能或多功能、有人或无人航空飞行器组成,以交感网为基础,整体具有能力涌现特点的空中作战系统[1]。航空集群作战系统的主要特征是单平台,能力单一、有限,集群行为复杂且可以产生集群能力涌现。航空集群基于各平台的功能耦合、结构效应、战场环境产生集群能力涌现。其中,结构效应指的是航空集群各平台按照一定的“系统结构”组织起来,相互之间发生交互与反馈、激励与响应等交感行为。
航空集群在空间上是离散分布的,航空集群的编队是其系统结构的重要外部表现,合理的编队是实现航空集群能力涌现的必要条件[2-4]。航空集群编队飞行空间对准方法主要有领航跟随法、基于行为法、虚拟结构法、人工势场法等,其中,领航跟随法具有建模论证简单、稳定编队容易等优点,在无人机编队中得到广泛应用[5]。当飞行器数量较少时,采用领航跟随法,一般僚机以长机为基准机,按照一定的距离、间隔、高度跟随基准机进行飞行,僚机通过调整自己的位置,从而保持编队队形稳定。当进行飞行器较多的航空集群编队时,僚机数量较多,如果都以长机为基准机,一旦某架僚机出现位置偏差,则容易与周边僚机发生碰撞,存在极大的安全隐患。
1 航空集群编队组织架构及分层对准规则
航空集群编队组织架构具备梯队和中队2个层级。航空集群编队由1个或多个梯队组成,不同梯队具有不同的航线。梯队由具有相同航线的1个或多个中队组成。中队由1架长机和1个或多个僚机组成,所有中队长机提前指定,梯队第一中队的长机为该梯队长机,航空集群编队内飞机分为梯队长机、中队长机、中队僚机。梯队长机和中队长机损坏或故障时,由预设的备份机替代。
航空集群编队的对准规则也分为梯队和中队对准2个层级。梯队级对准指梯队长机与中队长机之间具有多层领航跟随关系,梯队长机是该梯队默认的基准机。中队长机按照基准机选择算法以某一中队长机为基准机,按照一定的距离、间隔、高度跟随基准机进行飞行,每个中队长机只有1个基准机。中队级对准指中队长机与中队僚机之间具有多层领航跟随关系,中队长机是该中队默认的基准机,中队内僚机按照基准机选择算法以本中队长机或中队内某僚机为基准机,按照一定的距离、间隔、高度跟随基准机飞行。中队内每个飞机只有1个基准机。
航空集群2层对准规则都可以分别用图D=(V,E,A)描述,其中顶点集V={v1,v2,…,vn}为n架无人机,E为边集,表示飞机之间的距离,eij=(vi,vj)表示飞机Vi和Vj之间距离。A为权重邻接矩阵,也是集群编队内飞机对准关系矩阵,矩阵元素A=[aij],表示飞机之间对准关系,具有方向性,具体含义如下:
综上,通过对航空集群编队2级组织架构的描述及分层对准规则的建模,要实现本文所提空间对准方法,基础是实现集群编队内基准机的选择,可通过对准关系矩阵A的求解完成。
2 基于距离的基准机选择算法及复杂度分析
基于距离的基准机选择算法包括3个部分:①确认梯队内各中队长机的基准机;②确认中队内各僚机的基准机;③得到集群内所有飞机的基准机,如图1所示。
2.1 梯队内中队长机基准机选择算法
用DT=(VT,ET,AT)描述梯队内的中队长机。梯队内中队长机记为p0,p1,p2,…,pn其中p0是梯队长机。建立中队长机集合VT={p0,p1,p2,…,pn},建立并初始化对准关系矩阵AT=[aij=0],表示初始状态时飞机之间无对准关系。边集ET由于飞机移动,处于动态变化不需要提前建立。

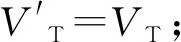
图1 基于距离的基准机选择算法流程图
2.2 中队内飞机基准机选择算法
用DZ=(VZ,EZ,AZ)描述中队内的飞机。中队内飞机记为q0,q1,q2,…,qn,其中q0是中队长机,是第1步中队长机p0,p1,…,pn的其中之一。建立中队内飞机集合VZ={q0,q1,q2,…,qn},建立并初始化对准关系矩阵AZ=[aij=0],表示初始状态时飞机之间无对准关系。边集EZ由于飞机移动,处于动态变化不需要提前建立。

综合Step1、Step2获得的对准关系矩阵,即可得到整个航空集群内飞机的对准关系矩阵A。实际工程实现时,不需要合并2个对准关系矩阵,集群内飞机通过交互信息,计算出自己的基准机即可。
2.3 基准机选择算法复杂度分析
假设某航空集群编队由k个梯队组成,每个梯队有m个中队,每个中队有n架飞机,集群内飞机总数为k×m×n,k,m,n∈N,N={0,1,2,…}。算法时间复杂度为:T=O(k×m×n+max(m(m-1)·log2m,n(n-1)log2n))。其中O(k×m×n)为初始化的消耗时间。O(m(m-1)log2m)为中队长机之间基准机选择的时间,这个过程由于需要对飞机之间的距离进行排序,需要消耗一定时间,并且不同排序算法的时间复杂度不同。
本文采用快速排序法,该算法的平均时间复杂度为O(mlog2m)[6]。由于除梯队长机外每一架中队长机选择基准机都需要排序,所以总时间复杂度需要乘以m-1,得到O(m(m-1)log2m)。同理得中队内僚机基准机选择时间复杂度为O(n(n-1)·log2n)。由于可采用并行算法同时求解中队长机之间的基准机和中队内僚机的基准机,所以选其中最大值,即O(max(m(m-1)log2m,n(n-1)log2n))。空间复杂度是对1个算法在运行过程中临时占用存储空间大小的量度。通过算法描述可知,算法存储空间与集群内飞机数量有关,该算法空间复杂度为O(k×m×n)。
3 编队飞行仿真及分析
航空集群由一定数量的飞行器组成,将每个飞机看成一个质点,其动力学特性可以用如下二阶离散时间模型来描述:
(1)
式中:i=1,2,…,N;xi(t)∈Rn、vi(t)∈Rn、ui(t)∈Rn,分别为飞机i的位置、速度和控制输入(加速度)。控制器更新时刻可表示为t=t0+qδ,t0≥0,t0表示初始时刻,δ≥0,δ表示控制器更新周期,q=0,1,2,…。
在航空集群编队控制领域,一致性控制得到了广泛运用。一致性控制是指通过设计一致性算法或者协议使得所有智能体的状态(加速度、速度、位置差)达到一致[7-10]。文献[7]提出航空集群二阶离散系统标准一致性协议如下:
(2)
式中:i=1,2,…,N;xi(t)∈Rn、vi(t)∈Rn、ui(t)∈Rn分别表示智能体i的位置、速度和控制输入(加速度);aij表示航空集群内飞机的对准关系;α>0、β>0分别表示位置和速度增益系数。
本文采用一致性控制协议对算法进行仿真。假设航空集群由1个梯队构成,该梯队有2个中队,第一中队由3架机组成,第二中队由10架机组成,箭头表示飞机之间的对准关系,每架飞机只有1个基准机(见图2)。
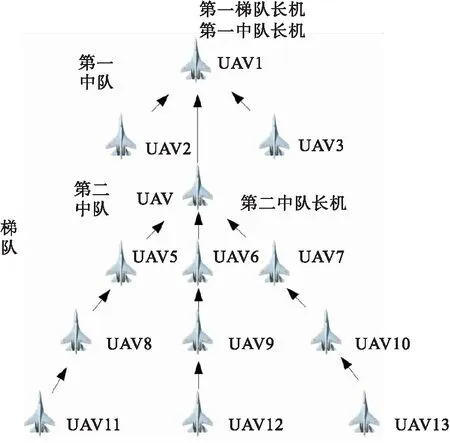
图2 航空集群编队组织架构
按照本文提出的航空集群分层对准方法和基准机选择算法,可得编队飞机之间的对准关系矩阵如下:
(3)
该矩阵体现了对准关系及对准的方向性,其中aij=1表示vj为vi的基准机,aij=0表示vj与vi无对准关系。
仿真预设飞机的初始位置采用随机方式生成x(0)=[random],初始速度为v(0)=[100,1,1,1,2,2,2,3,3,3,4,4,4],其中梯队长机初速度设置为100,该值由集群编队任务决定,其余飞机最终会调整自身控制量保持该速度。根据初试状态和速度,为控制加速度、速度变化振荡程度和缩短收敛时间,多次实验后选择的位置增益和速度增益取α=0.1、β=0.25,仿真时间T=150 s。仿真结果见图3~8。
从仿真图3可以看出,集群梯队长机作为基准机其控制量保持不变,其余飞机控制量的变化由振荡趋于平稳,与梯队长机距离近的飞机越早趋于稳定,在时间t=65 s时,集群内各飞机的控制量收敛到0。同样的变化趋势在仿真图4集群飞机的速度变化也可以体现,在时间t=65 s时,集群内各飞机的速度与梯队长机一致,保持在100。仿真图5显示当集群飞机控制量稳定后飞机之间的相互位置,即编队队形保持稳定。图6显示集群飞机一致性误差在逐渐减小,最终趋近于0,集群飞机保持编队的稳定飞行,达到了预期效果。
在集群编队飞机达到稳定飞行状态后,UAV6与UAV9之间的距离为100;UAV9与UAV12之间的距离为120;UAV6与UAV12之间的距离为220。假设飞机之间的安全距离为100,在70 s时对集群编队内的UAV9施加一个干扰,使其位置产生误差Δx=40,从图7可以看出本文提出的分层对准法,UAV6与UAV9之间的距离由100变为140;UAV9与UAV12之间的距离保持不变为120;UAV6与UAV12之间的距离由220变为260,各飞机之间距离大于安全距离。如果采用传统的长僚跟随法,UAV9与UAV12跟随UAV6飞行,当UAV9出现位置偏差时,由图8可以看出UAV6与UAV9之间的距离由100为140;UAV9与UAV12之间的距离保持由120变为80;UAV6与UAV12之间的距离保持不变为220;UAV9与UAV12之间的距离小于安全距离,存在安全隐患。传统长僚机跟随法,虽然算法简单,但是当飞机数量多且僚机出现位置偏差时,僚机之间存在碰撞风险,不适用于大集群编队飞行。
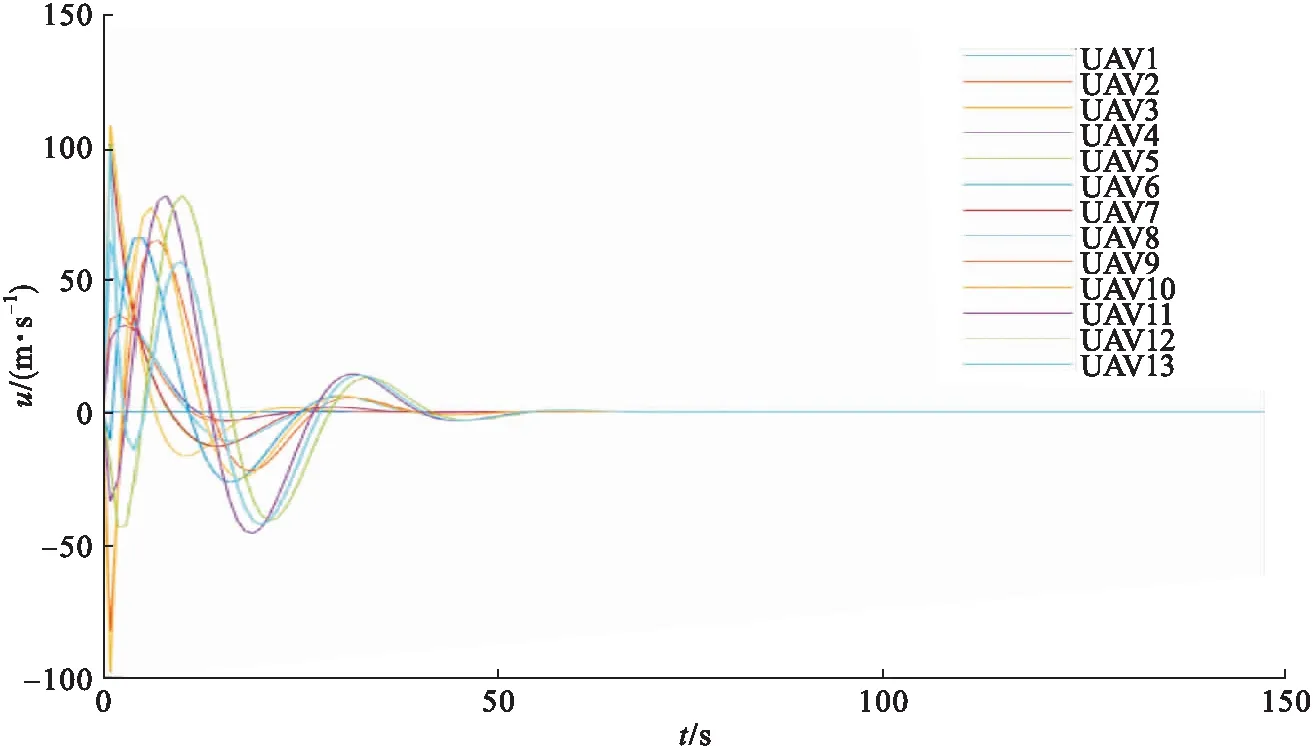
图3 集群飞机的控制变化
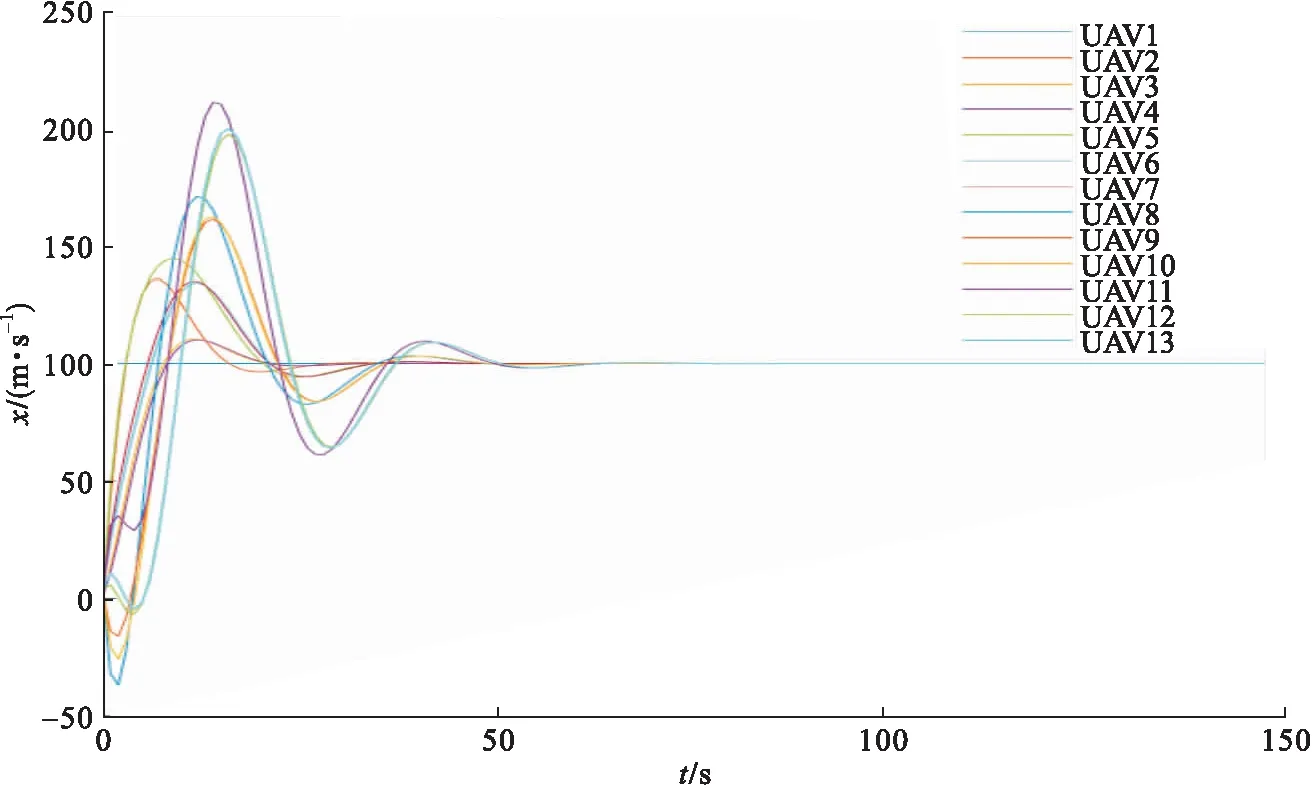
图4 集群飞机的速度变化
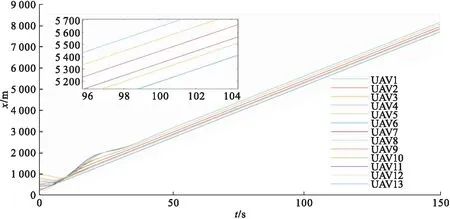
图5 集群飞机的状态变化
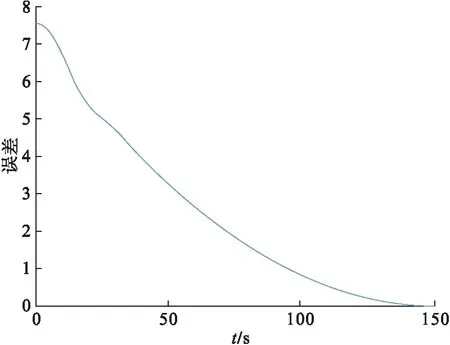
图6 集群飞机的一致性误差

图7 本文分层对准法僚机位置误差影响
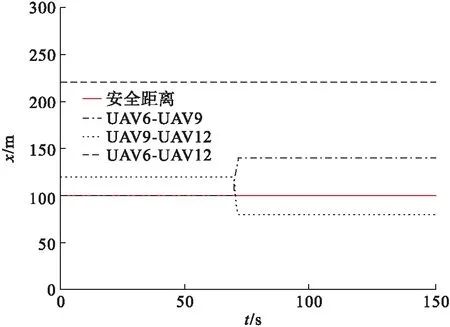
图8 传统长僚机跟随法僚机位置误差影响
4 结语
航空集群编队飞行是实现航空集群能力涌现的必要条件。本文提出一种航空集群大编队飞行空间对准控制方法,构建航空集群编队两级组织架构,航空集群编队由若干梯队构成,梯队由若干中队构成,中队由长机和若干僚机构成,通过分层式对准方法和基于距离的基准机选择算法,飞行中除梯队长机外,每架飞机按照一定的距离、间隔、高度跟随基准机进行飞行。最后采用一致性控制协议对集群编队飞行进行了仿真验证,实现了航空集群大编队飞行整体队形严整和稳定。
猜你喜欢
电子工业专用设备(2022年1期)2022-07-13
小哥白尼(军事科学)(2021年4期)2021-07-28
小哥白尼·趣味科学画报(2020年1期)2020-06-09
宇航学报(2019年8期)2019-09-06
专用汽车(2018年10期)2018-11-02
当代陕西(2018年12期)2018-08-04
时代青年(上半月)(2017年1期)2017-02-09
成长·读写月刊(2016年12期)2017-01-12
少先队活动(2016年7期)2016-07-25