高速状态下伺服随动控制系统设计与实践
2020-03-25 15:14黄晓伟
价值工程 2020年4期
关键词:连接
黄晓伟

摘要:本文通过采用三菱电机FX5-40SSC-S简易运动控制模块、FX5U系列可编程控制器、MR-J4W2-22B型伺服放大器和SSCNETⅢ光纤连接,设计了一种X-Y双轴伺服随动控制系统。通过PLC的程序算法设计,实现了X-Y双轴伺服运动机构控制机构跟随一个可变频调速的转盘同步运行,在运动的转盘上实现预设的动作要求,该设计方案对实际应用具有一定的参考价值。
Abstract: This paper designs an X-Y dual-axis servo follow-up control system by using Mitsubishi Electric FX5-40SSC-S simple motion control module, FX5U series programmable controller, MR-J4W2-22B servo amplifier and SSCNETⅢ optical fiber connection. Through the programming algorithm design of the PLC, the XY dual-axis servo motion mechanism control mechanism is synchronized to follow a variable-frequency speed-adjustable turntable to achieve preset motion requirements on the moving turntable. This design scheme has certain reference value for practical application.
关键词:伺服随动;三菱PLC;简易运动控制模块;SSCNETⅢ连接
Key words: servo-suite;Mitsubishi PLC;simple motion control module;SSCNETⅢ connection
中图分类号:TP275 文献标识码:A 文章编号:1006-4311(2020)04-0220-04
0 引言
在工业自动化控制系统中,伺服电机控制系统是最常见的电气控制系统之一,它常常针对自动化系统中的位置、角度和转速进行高精准、快响应、超稳定的控制。而在伺服控制系统中,能进行随动控制,让伺服系统随运动主轴或其他规律变化的运动信号而进行同步运行的系统在控制要求上又提出了进一步的要求。本文以三菱电机伺服控制系统为例,通过具体的控制要求,设计一套伺服随动系统的解决方案,为伺服控制系统拓宽一下控制方式和控制思路。
1 系统整体控制要求
在本项目中,具体的控制要求是:要在一个旋转运动的圆盘上画出一条半径虚线。画圆半径虚线可以分解为伺服跟随圆盘旋转即两者相对静止,然后叠加画虚线功能。①旋转跟随功能:画笔要与不同半径的圆盘旋转线速度保持一致,即画虚线半径前,画笔要跟随圆盘运动,相对静止。②画半径虚线功能:伺服系统实现跟随功能后,要根据半径的实时值,计算画笔运动的切线速度,在圆轨道切换时,通过控制电磁铁的通断来画出圆的半径虚线。
2 控制系统模型设计
控制系统的主要器件全部选用三菱品牌,核心控制器选择三菱FX5U PLC,增加FX5-40SSC-S简易运动控制模块,模块直接通过SSCNETⅢ连接伺服驱动器,可以方便实现对伺服电机的运动控制。伺服驱动器选择MR-J4W2-22B型,自带SSCNETⅢ/H型接口,该驱动器能直接驱动两台伺服电机,可以连接两台200W以下的伺服电动机,实现双轴的各种插补运行。变频器选择FR-E740-0.75K、触摸屏选择GS2017-WTBD。控制系统的结构框图如图1所示。
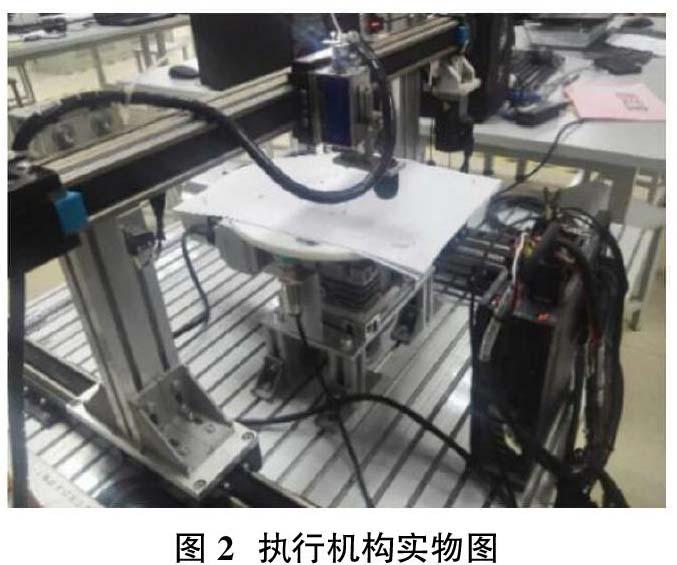
3 执行机构硬件设计
设计了系统的执行机构,其实物图如图2所示。在该机构中,由2个伺服电机带动同步带,组成XY轴十字工作台,轴上各装有原点、左右限位传感器;电磁铁安装在龙门架上,控制画笔的升降运动;三菱变频器驱动异步电动机,经减速器驱动圆盘转动;圆盘转轴的下方装有测速用的旋转编码器;圆盘下方装有圆盘检测零点、用作触发信号的接近开关。
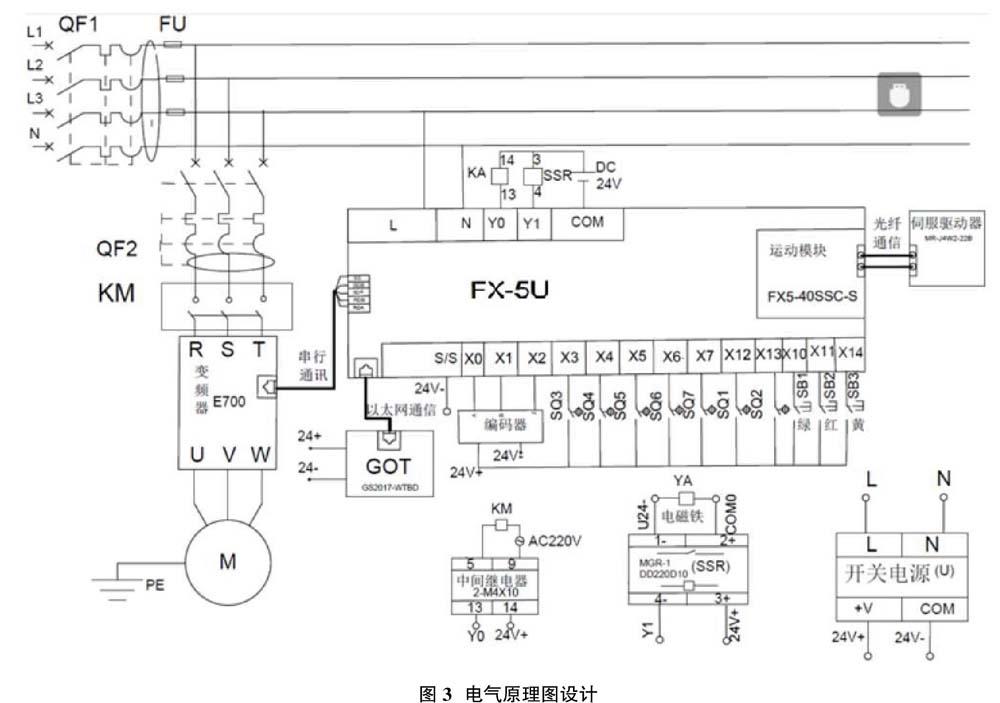
4 电气原理图设计
控制系统的电气原理图设计如图3所示。
5 程序及软件设计
根据控制要求,可以通过旋转平台下的编码器进行测速,以一定时间内转过的角度θ为基准,可以获得圆盘旋转的角速度ω,双轴控制的画笔移动速度v,时间为t,则可以以圆盘中心为原点建立极坐标系(θ,ρ)。在极坐标系下,画笔在旋转圆盘上画一条从圆心出来的直线r只要符合以下方程组:
5.1 系统控制流程设计
按照控制要求,在系统启动后,首先要返回到X轴和Y轴的原点,然后跑到圆心。接下来启动变频器,圆盘转动,编码器进行测速,圆盘零点开始检测,当达到零点时进行半径的切换,在切换过程中完成线段的划分。
5.2 伺服参数系统设置
在GX Works3软件中,必须在工程中对FX5-40SSC-S简单运动控制模块进行功能设置。原点回归方式选择:近点DOG型,原点回归方向为:正方向(地址增加方向)。
然后,在轴1中对轴2进行插补设置,如图6所示,插补对象轴为轴2,跑直线时选择ABS直线插补,跑圆弧时选择INC圆弧插补,插补设置完成后,可以通过离线模拟进行查看和修正。如图7所示。
5.3 变频器参数设置
变频器设置参数主要为通信模式修改设置。参数设置表如表1所示。
5.4 人机界面设计
人机界面设计主要有以下几个设置按钮:回原点Origin按钮,变频启停Start、Stop按钮,系统开始运行START按钮。输入框为:并平齐运行频率设置。显示框为:AX1轴1位置和AX2軸2位置显示,变频器输出频率、输出电流、输出电压显示等。(图8)
6 系统整体调试
系统整体调试步骤如下:
①回原点:伺服使能上电,回XY轴平台原点。②找圆心:伺服使能失电,单独启动变频器驱动圆盘旋转,手动下降画笔,通过画圆找到准确的圆心,记录此时的圆心坐标输入程序。③转速运算:按设定频率启动变频器,通过旋转编码器采集高速脉冲,计算得出减速电机的实时转速,并实时显示。④测试效果:按操作步骤测试后发现变频器的最佳运行频率为18Hz。在该运行频率下,双轴伺服系统的随动运行效果最佳。
7 总结
本系统理论设计上完全符合控制要求和任务,实际运行效果好。但也存在一些问题,主要是由于电磁铁带动画笔部分机械结构和旋转圆盘平整度有一定偏差,所以开始切入和离开部分有毛刺,拖痕较明显,绘画质量不十分理想。
参考文献:
[1]张磊.基于PLC和伺服控制器随动跟踪量化计算方法[J].自动化技术与应用,2019(04):74-76.
[2]林杰文,吴亦锋.基于PLC的伺服电机运动控制系统设计[J].机电技术,2015(05):20-23,26.
[3]胡志刚.基于三菱PLC的伺服电机控制系统设计[J].价值工程,2017,36(05):80-81.
猜你喜欢
销售与市场·渠道版(2016年5期)2016-06-15
商场现代化(2015年25期)2015-12-05
建筑科学与工程学报(2015年3期)2015-07-25
现代电子技术(2015年5期)2015-03-31