基于双目视觉与深度学习的番茄本体特征检测系统
2020-03-20 03:44李颀强华
南方农业学报 2020年1期
李颀 强华
摘要:【目的】設计基于双目视觉与深度学习的番茄本体特征检测系统,实现番茄本体特征的自动无损检测,为水肥一体化和智慧农业提供技术支持。【方法】采集4000张番茄图像作为研究样本,利用基于深度学习SSD_MobileNet卷积神经网络的番茄主要器官检测算法,对番茄植株、茎、花、果实和叶进行检测。基于双目视觉的图像测量算法对各器官目标区域中株高、茎直径、果径和叶面积进行特征提取。【结果】利用SSD_MobileNet网络模型对研究样本进行训练和测试,调用训练好的模型对番茄各器官进行识别和定位,对番茄植株、茎、花、果实和叶的检测准确率分别为98.5%、99.0%、99.5%、99.5%和98.0%。利用基于双目视觉的图像测量算法对番茄本体特征进行测量,通过实践证明该系统对株高、茎直径、果径和叶面积测量的相对误差可分别控制在1.5%、1.0%、1.2%和1.3%以内,可实现番茄本体特征的精确检测,较常见系统的鲁棒性和精度有了明显提升;整套系统在番茄大棚中已稳定运行半年,完成了对番茄全生命周期的本体特征检测,并可将数据保存于数据库,实现对番茄本体特征的自动、无损监测。【建议】优化番茄特征遮挡问题,丰富训练数据集,优化网络模型,提高识别率和鲁棒性;建立番茄特征数据共享云平台,实现番茄疫病的提前预警;确定本体特征与番茄长势的关系,以快速判断施肥量,实现大棚番茄自动精确施肥。
关键词: 番茄;器官;本体特征;双目视觉;深度学习
中图分类号: S126 文献标志码: A 文章编号:2095-1191(2020)01-0237-08
Abstract:【Objective】A tomato ontology feature detection system based on binocular vision and deep learning was designed to realize the automatic non-destructive detection of tomato ontology features, providing technical support for the integration of water and fertilizer and intelligent agriculture. 【Method】A total of 4000 tomato images were collected as research samples, and the main organs(plant, stem, flower and fruit) of tomato were detected by using the algorithm based on SSD mobile net convolution neural network. Based on the binocular vision image measurement algorithm, the plant height, stem diameter, fruit diameter and leaf area of each organ target area were extracted. 【Result】SSD MobileNet network model was used to train and test the research samples, and the trained model was used to identify and locate the tomato organs. The results showed that the detection accuracy of the system for tomato plants, stems, flowers, fruits and leaves was 98.5%, 99.0%, 99.5%, 99.5% and 98.0% respectively. Secondly, the image measurement algorithm based on binocular vision was used to measure the tomato ontology features. Experiment showed that the relative errors of the system for measuring the plant height, stem diameter, fruit diameter and leaf area of tomato could be controlled within the range of 1.5%, 1.0%, 1.2% and 1.3% respectively, which could realize the accurate detection of tomato ontology features. Compared with common systems, the system had a greater robustness and accuracy. The whole system has been running stably in tomato greenhouse for half a year, and has completed the whole life cycle of tomato ontology feature detection. It could save the data in the database, which realized the automatic and non-destructive monitoring of tomato ontology feature.【Suggestion】Following suggestions are proposed:optimizing the characteristic shielding problem,enriching training data sets, optimizing network model, improving recognition rate and robustness. Establishing tomato characteristic data sharing cloud platform to realize early warning of tomato blight. Determining the relationship between ontology characteristics and tomato growth, in order to quickly judge fertilization amount, realize automatic and precise fertilization of greenhouse tomato.
Key words: tomato; organs; ontology characteristics; binocular vision; deep learning
Foundation item:Shaanxi Agricultural Science and Technology Innovation Engineering Project[201806117YF05 NC13(1)];Key Science and Technology Project of Shaanxi Department of Science and Technology(2015NY028);Science and Technology Project of Weiyang District,Xian City(201305)
0 引言
【研究意义】随着科学技术的变革与社会经济发展,传统的农业生产逐渐向现代化农业发展,其中智慧农业和精细农业已成为当前现代化农业发展的主要趋势。作物生长过程中,植株的株高、茎直径、叶面积和果径能直接反映出作物的缺肥情况(张书彦等,2017)。实际生产中对作物本体特征的监测大多是种植人员根据经验采用目测的方法进行判断,但人类肉眼分辨能力有限,通常肉眼可识别时,作物的伤害已较严重。而将作物的本体特征数据作为水肥一体化施肥系统的反馈,可实现按需精准施肥,对智慧农业的发展有一定推动作用。【前人研究进展】近年来,随着计算机及图像处理技术的发展,机器视觉技术已广泛应用于农业领域(刁智华等,2014)。崔世钢等(2015)采用颜色通道组合运算的方法对植物图像进行阈值分割,得到叶脉和叶片轮廓图像,但该方法对环境变化很敏感,若光线发生变化,会因颜色阈值分割失效而无法获得叶片轮廓。方政等(2015)融合最小二乘法曲线拟合和Hough变换方法对重叠番茄果实进行识别,但该算法识别的平均误差较高(5.1%)。杭腾等(2015)提出通过机器视觉方式对番茄的长势信息进行测量,采用基于r-g颜色因子的Otsu自动阈值分割法提取目标区域,但该方法对于农业环境下复杂背景的干扰因素考虑不足,具有一定局限性。梁帆等(2015)通过图像分割和边缘检测技术提取出蔬菜的总根长、株高和叶冠投影面积等外部形态特征数据,但测量的根长、株高数据与人工测量结果间的误差达5%。员伟康等(2016)使用最大类间距法对植物药材图像进行分类,花类图像分类准确率为85%,叶类图像准确率为62%,但当叶片颜色发生变化时算法的准确率较低,因此在田间农业复杂背景干扰下该方法不适用。陈建辉等(2017)提出基于关键点检测的植物叶端特征自动提取的方法,但该方法要求叶片方位唯一,且只适用于叶缘无锯齿的叶片,对于叶片主轴旋转或叶片形态不同的情况误差较大。【本研究切入点】综上所述,对于花果形态多样、果实颜色变化丰富、重叠遮挡严重和环境背景复杂的农田环境,目前仅用传统视觉算法进行特征提取的误差较大。【拟解决的关键问题】以番茄为研究对象,设计番茄本体特征精确检测系统,利用深度学习SSD_MobileNet卷积神经网络对番茄植株的主要器官进行检测,结合双目图像测量算法分别在番茄各器官目标区域中提取株高、茎直径、果径和叶面积特征,为实现番茄本体特征的自动检测及水肥一体化提供技术支持。
1 系统设计与研究方法
1. 1 系统总体组成
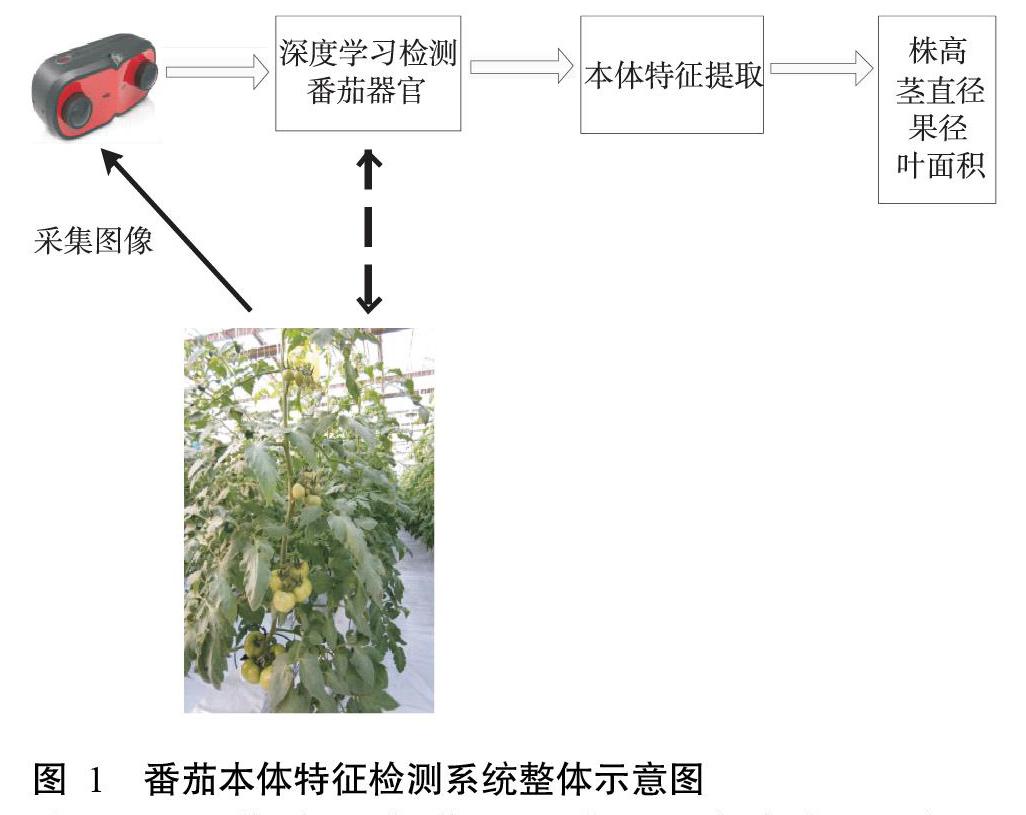
本研究的番茄图像样本采集于西安市临潼区雨金镇番茄大棚,品种为金鹏1号。基于双目视觉和深度学习的植物本体特征检测识别系统如图1所示,主要包括双目相机、深度学习识别及特征提取3部分。双目相机进行番茄图像采集,并利用相机标定结果完成图像测量;采用深度卷积神经网络对番茄的植株、茎、花、果实和叶进行检测并给出各器官在图像中的目标区域,最终在各器官图像目标区域中,利用特征提取算法精确提取番茄株高、茎直径、果径和叶面积特征。
1. 2 基于深度学习的番茄器官识别方法
由于传统视觉方法对番茄器官识别与定位的误差较大,对农田中复杂环境的鲁棒性较差(Wu et al.,2019)。本研究提出一种结合SSD和MobileNet的深度卷积网络模型SSD_MobileNet,较传统方法提高了识别率,且具有较强的鲁棒性,可适应农田中复杂环境的变化。MobileNet卷积神经网络是一种轻量级网络模型,网络主要引入了深度可分离卷积(Depthwise separable convolution),将标准卷积核分成一个深度卷积(Depthwise convolution)和一个1*1的逐点卷积(Pointwise convolution),可极大减少计算量(孙俊等,2018)。标准卷积层将维度为Df×Df×M的输入层转化为维度为Dg×Dg×N的输出层,其计算量K如公式(1)所示;利用深度可分离卷积的计算量K′如公式(2)所示,计算量的比率如公式(3)所示;由公式(3)可知,MobileNet网络结构可有效减小计算量,其使用3*3的卷积核可使计算量降低为原计算量的八分之一。
MobileNet网络结构共28层,包括3层输入层、22层中间卷积层及平均池化层、全连接层和分类层(周云成等,2018)。MobileNet在降低运算成本的同时能保持较高的精度,可满足本次番茄主要器官提取的快速性及精度要求,但对番茄器官多尺度变化不敏感。SSD模型由Liu等于2016年提出,是一种适应于多尺度变换的目标检测卷积网络(吴天舒等,2018)。SSD模型结构如图2所示,以VGG-16为基础,将其全连接层FC6和FC7转换成3*3卷积层Conv6和1*1卷积层Conv7,移除dropout层和Fc8层,并新增卷积层以獲取更多的特征图用于预测offset和confidence(彭红星等,2018)。SSD模型采用金字塔结构的特征提取方式,其特征从不同的卷积层提取出来,组合后再进行回归和分类,可充分挖掘图像的特征,完成对多尺度变化目标的检测。
针对以上两种网络模型的优缺点,提出SSD_MobileNet网络模型(图3)。将SSD模型架构中的VGG-16替换为MobileNet,利用MobileNet网络完成番茄图像特征的提取,可大幅降低参数量,减少整个模型计算量,有效降低训练过程中的过拟合问题。利用SSD网络完成特征识别分类,可适应适应番茄特征多尺度的变换。SSD_MobileNet网络模型可在确保对番茄主要器官检测精度的同时保证检测速度。
1. 3 双目视觉图像测量方法
由于传统单目相机图像测量只能在番茄与相机距离一定的情况下测量,且传统特征提取算法鲁棒性较差。因此,本研究提出利用双目视觉图像测量算法实时获取番茄图像的深度信息。在视野范围内番茄的位置可任意移动,双目视觉更适合农田复杂环境的图像测量;使用Stereolabs推出的ZED双目相机,400万像素,分辨率为3840*1080,5v供电与PC通过USB连接,每秒可获取30帧(孙瑜和李占利,2015)。首先需要对相机进行标定,分别获得左右相机的内参矩阵,如公式(4)和公式(5)所示。
如图4所示,首先加载相机标定参数并采集左右相机的图像数据,然后利用极线校正算法对左右相机的图像进行配准,使得相同特征点在左右相机中处于同一条直线上。
利用视差计算图像的深度图,空间实际坐标点在左右相机图像中的位置差定义为视差,用△d和公式表示,其计算方法如公式(7)所示。由公式(6)和公式(7)可得到P点相对于左相机的坐标,如公式(8)所示。由公式(8)可知,已知番茄图像点在左右相机中的视差,可计算出该点相对于相机的三维坐标,并实时获取番茄图像的深度信息,实现视野范围内番茄任意位置的图像测量。
2 系统效果分析
2. 1 SSD_MobileNet网络模型训练
利用双目相机在大棚中采集番茄植株、茎、花、果实和叶的图像,各采集1000張,分别拍摄包含每种器官的不同角度、距离及光照下的图片,每一类各使用800张图像作为训练集,剩下200张作为测试集。利用图像标注工具LabelImg对待训练的4000张图片进行手动标注,在图像中标出番茄植株、茎、花、果实和叶的准确位置,标注工具针对每张图片生成固定格式的数据来描述图像编号、大小、标注区域及所属类别等信息。利用TensorFlow深度学习框架进行模型训练,标注完数据后将数据转化为可训练的.record格式。由于深度卷积神经网络SSD_MobileNet训练需要大约10000张图片数据,而番茄图像只有3200张用于训练。因此,首先采用coco数据集对SSD_MobileNet进行预训练,然后在预训练模型的基础上设置待识别的类为植株(Plant)、茎(Stem)、花(Flower)、果实(Fruit)和叶(Leaf),设置网络训练的batch_size为16,学习率为0.04,迭代次数为100000次,经过8 h模型训练完毕。
2. 2 番茄器官识别与定位
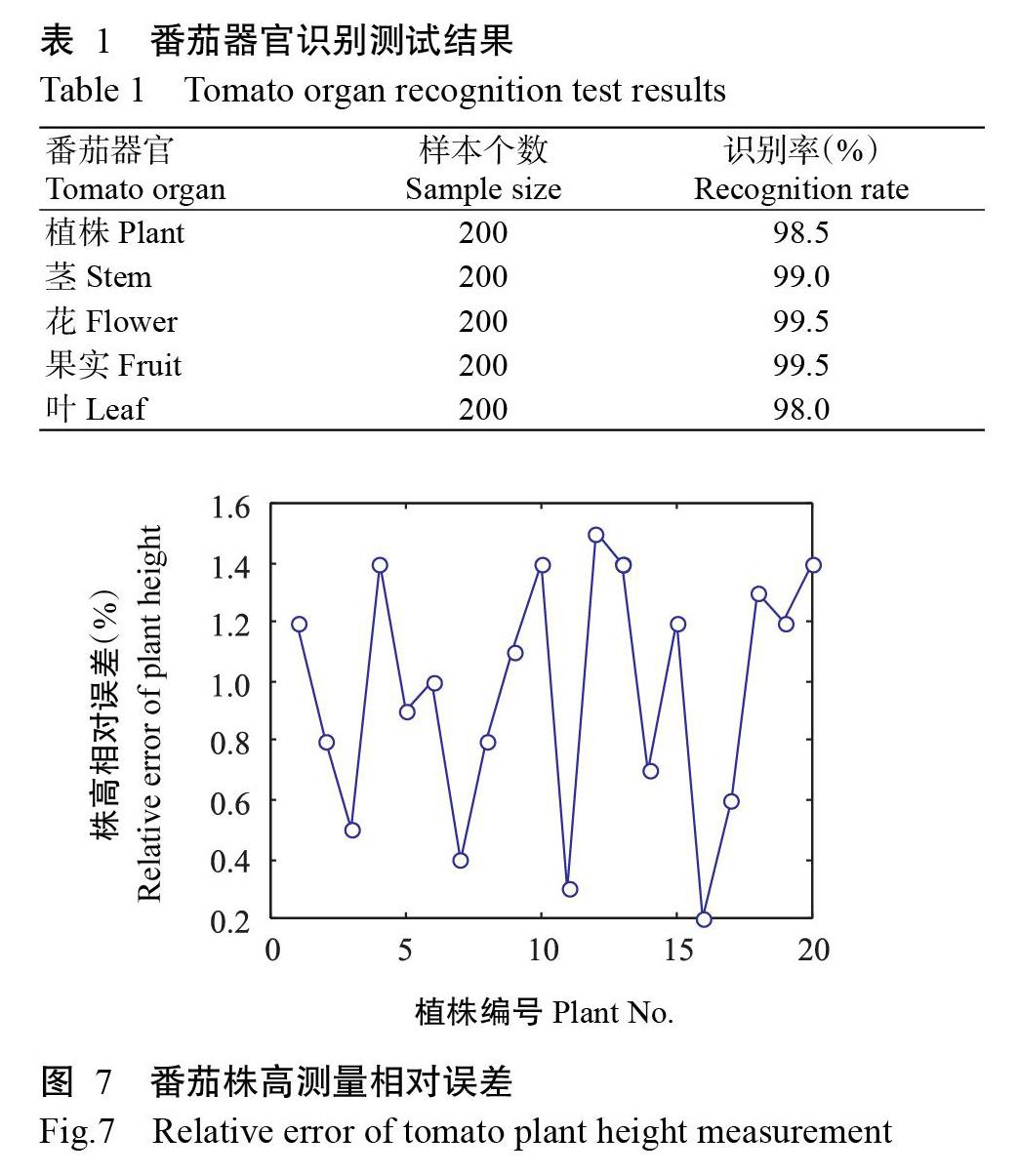
调用训练好的SSD_MobileNet网络模型对番茄各器官进行实时检测。如图6所示,每张图像的处理时间为30 ms,模型可准确地识别出番茄各器官的准确位置,并给出相似概率。样本测试结果如表1所示,对番茄植株、茎、花、果实和叶的检测准确率分别为98.5%、99.0%、99.5%、99.5%和98.0%。结果证明,利用SSD_MobileNet深度卷积神经网络可准确识别和定位番茄器官,能适应各种复杂环境的干扰,可见鲁棒性较传统方法有了明显提升。
2. 3 番茄本体特征测量
2. 3. 1 番茄株高测量 在深度学习检测出的植株图像框中提取番茄的株高特征。利用深度学习模型可得到植株所在图像区域长方形框的(ymin,xmin)和(ymax,xmax),计算得到长方形框的中心点坐标为[(xmin+xmax)/2,(ymin+ymax)/2],然后利用双目测距算法,分别测量株高图像上顶点A[(xmin+xmax)/2,ymax]与下顶点B[(xmin+xmax)/2,ymin]的空间三维坐标,表示为A(X1,Y1,Z1)和B(X2,Y2,Z2)。最后,利用公式(9)求出A、B两点的距离即为番茄的株高特征(D)。随机选取20株番茄对株高进行测量,实际值采用卷尺手动测量获得,测量的相对误差如图7所示,证实该系统可实现对株高的测量,且相对误差保证在1.5%以内。
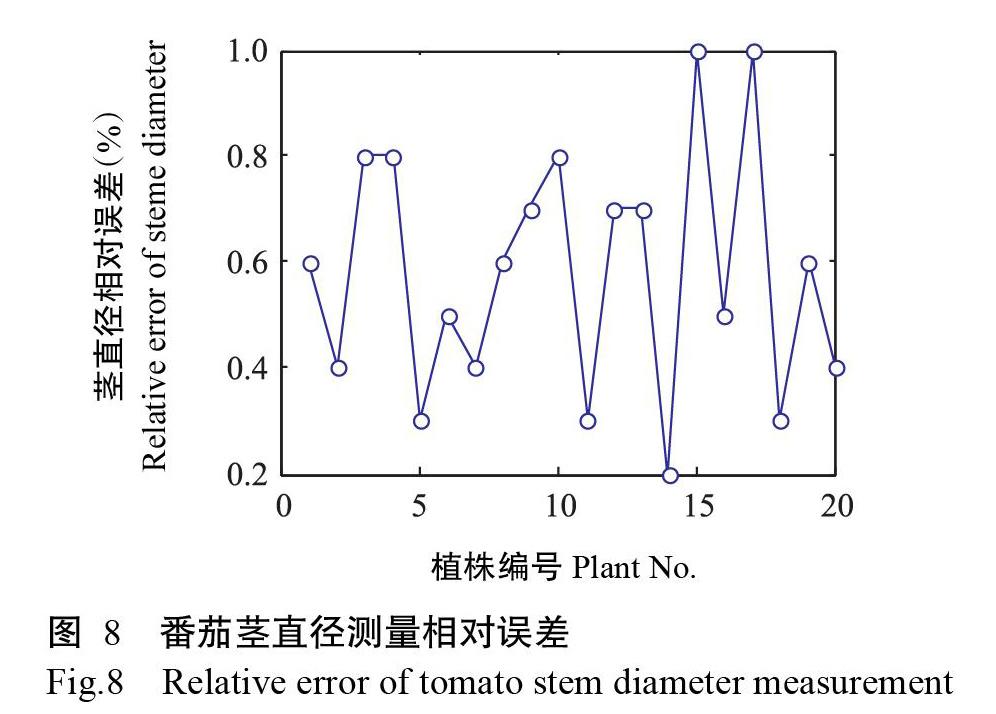
2. 3. 2 番茄茎直径测量 由于深度学习检测后框出的位置只能保证茎在长方形的图像区域中,无法随着茎的转动而变化。而番茄的茎在图像中不完全竖直,针对此问题提出基于霍夫变换直线拟合的茎直径测量方法。霍夫变换的原理是利用投票算法检测特定形状,并计算统计结果的最大值而得到一个符合要求的集合(陈培俊和伍铁军,2014)。将番茄图像空间中包含的直线形状区域投影到另外的坐标空间中特定点上,利用峰值统计实现图像直线检测。由于番茄茎的轮廓一般在图像中均呈直线形状,在深度学习检测出茎的图像框中利用Canny算子提取茎的边缘,然后对边缘采用霍夫变换拟合出茎轮廓的两条直线,利用几何方法求出一条过检测框中心点两直线的公垂线,利用公式(8)双目测距算法分别计算出公垂线与两条直线交点的三维坐标,最后利用公式(9)计算两交点的距离即为番茄的茎直径。随机选取20株番茄对茎直径进行测量,实际值采用游标卡尺手动测量获得,测量的相对误差如图8所示,表明该系统可实现对茎直径的测量,且相对误差保证在1.0%以内。
2. 3. 3 番茄果径测量 利用训练好的深度学习模型可检测出果实所在的图像目标区域。由于番茄果实基本呈椭圆形,利用深度学习检测出果实所在图像区域长方形框的(ymin,xmin)和(ymax,xmax),可计算得到长方形框的中心点坐标为[(xmin+xmax)/2,(ymin+ymax)/2],然后用公式(8)双目测距算法分别测量点C[xmin,(ymin+ymax)/2]与D[xmax,(ymin+ymax)/2]的三维坐标。最后利用公式(9)求出C、D两点的距离即为番茄的果径特征。果径测量试验随机选取20株番茄,实际值采用游标卡尺手动测量获得,测量相对误差如图9所示,相对误差可保证在1.2%以内。
2. 3. 4 番茄叶面积测量 训练好的深度学习模型可检测出番茄叶子所在的图像区域,利用像素统计的方法计算出叶面积特征。由于番茄叶子为绿色,在叶子图像框中采用像素阈值分割的方法统计颜色为绿色的像素点的个数。利用双目视觉测量出叶子与相机的空间距离,结合相机标定结果可得到每个像素代表的实际面积,然后通过累加可计算出一片叶子的面积。最后计算所有叶子面积的平均值,作为番茄叶面积特征。实际值通过手动测量获得,叶子的手动测量采用网格法,将单片叶子平铺放在坐标纸上,沿着叶子的形状将其轮廓画在透明的坐标纸上,然后数网格的个数。计算格子时叶片边缘凡超过半格的计算为1,不足半格则不计数。选取坐标纸大小为每个格子长宽各为1 mm,面积为1 mm2,数出的网格个数即为叶片面积。如图10所示,20株番茄叶面积测量值相对误差可保证在1.3%以内,表明该系统可实现对叶面积的测量。
2. 4 系统应用效果
将该系统应用于西安市临潼区雨金镇的番茄大棚。图11为系统实际应用图,相机距离最近的番茄为1.0 m,相机架高高度为0.5~1.5 m,可调整。系统包括双目相机、PC和上位机,双目相机放置在两行番茄的中间保证可采集到更多株的番茄图像,图像通过USB接口实时传送到PC,对番茄长势进行实时监测。由于本体特征检测对实时性要求不高且夜晚无法获得图像,系统在每天上午10:00开始运行到下午16:00,每小时对番茄的株高、茎直径、果径和叶面积进行10次测量,最后取整天每个本体特征的平均值作为当天番茄的本体特征数据,并将数据上传每天保存一次至上位机数据库;农户可在大棚中的PC上位机界面上实时查看番茄的当前本体特征数据和历史数据,了解番茄当前长势从而调整水肥用量。图12为系统上位机数据库界面,数据的查询方式包括按周期、本体特征、是否有异常或具体日期进行查询,界面显示了2018年4—7月对番茄全身命周期数据按周查询的方式所显示的番茄本体特征数据。上位机界面会自动监测番茄生长过程中各本体特征的实时变化,对比不同时期番茄本体特征标准数据,判断当前成长时期是否有异常,并将数据保存至数据库最后一列,若有异常系统会自动报警提醒农户。通过系统实际应用,证明结合深度学习与双目视觉的算法可完成番茄本体特征的精确无损测量,保存番茄成长过程中的数据并自动判断是否有异常,为水肥一体化和智慧农业提供实时数据支持。
3 讨论
本研究提出结合深度学习与双目视觉的番茄本体特征测量算法,对农田复杂环境中的番茄长势进行实时监测。通过深度卷积神经网络对番茄本体特征进行检测和识别,利用双目视觉完成本体特征的精确图像测量,对实现精细农业具有重要意义。采用基于SSD_MobileNet的深度卷积神经网络,复杂农田环境变化的鲁棒性较好,网络结构中引入轻量型的MobileNet卷积网络,其在运算时间和运算资源的消耗较常见网络明显降低,番茄器官检测时间仅30 ms,能满足系统实时性要求。杭腾等(2015)提出的基于r-g颜色因子的Otsu自动阈值分割测量算法及刘骥等(2016)提出的基于叶片形状特征的识别算法,分别采用传统视觉算法的灰度阈值和轮廓对特征进行识别,但对农田复杂环境变化的鲁棒性较差。周云成等(2018)提出的基于DCNN的番茄器官分类识别算法,可实现番茄特征的检测,但特征检测时间为320 ms,实时性较差。通过实际比较证明提出的基于深度学习和双目视觉的番茄特征检测算法可在保证系统实时性的同时,保证较高检测精度。
虽然本研究检测效果良好,但在番茄本体特征有遮挡的情况下检测准确率会明显降低,且番茄数据集还不够丰富,模型鲁棒性有待进一步提高。番茄本体特征数据只是保存在本地,需设计番茄特征数据共享云平台。为实现番茄水肥一体化栽培,还需设计施肥量预测算法,利用环境信息和番茄本体特征预测施肥机营养液配比。
4 建议
4. 1 优化番茄特征遮挡问题
在番茄特征提取的过程中,采用SSD_Mobile-Net深度学习的方法对光照、角度和距离等环境干擾的鲁棒性较强,但在应用过程中发现当特征存在较大遮挡情况时会出现特征检测准确率下降的问题。后期可针对番茄特征遮挡问题进行进一步研究,应采集番茄不同特征遮挡情况下的数据集,对网络进行更细致的训练。采集更丰富的番茄图像训练数据集,且可对番茄图像进行缩放、旋转及灰度变换来生成更多的训练数据,利用更丰富的训练数据集训练网络,进一步提高网络模型的识别率和鲁棒性。
4. 2 设计番茄特征数据共享云平台
本研究对番茄特征数据进行实时采集,目前数据利用上位机保存在本地数据库,但本地数据的存储量有限且数据的重复利用率较低,无法实现不同地域数据共享,因此需要建立番茄特征数据共享云平台。本地上位机通过WIFI将数据实时传输到云平台,云平台不仅可对大量数据进行保存,还能将特征数据与番茄生长情况共享到网络,同时接收不同地域的数据,从而对番茄疫病进行提前预警,为番茄生长状态后期研究提供大数据支持。
4. 3 研究番茄施肥量预测算法
目前只完成番茄本体特征的测量与数据保存,对于实现番茄水肥一体化需进一步研究番茄本体特征与施肥量的关系。结合番茄生长环境的温湿度、EC和pH,建立基于番茄生长特征的营养液设定值预测算法,根据当前番茄的长势和环境信息预测下一周期施肥机营养液EC和pH的调节量,从而实现番茄水肥一体化科学精准灌溉。
参考文献:
陈建辉,郑小东,赵中堂. 2017. 基于关键点检测的植物叶端特征自动提取[J]. 江苏农业科学,45(9): 205-207. [Chen J H,Zheng X D,Zhao Z T. 2017. Automatic extraction of plant leaf tip features based on key point detection[J]. Jiangsu Agricultural Sciences,45(9): 205-207.]
陈培俊,伍铁军. 2014. 去除阴影后利用霍夫直线变换检测茶叶中的杂质[J]. 机械工程与自动化,(5): 63-65. [Chen P J,Wu T J. 2014. Detect impurities in tea-leaves by hough line transform after removing image shadow[J]. Mechanical Engineering and Automation,(5): 63-65.]
崔世钢,杨莉莉,吴兴利,梁帆. 2015. 面向LED植物生长柜的叶脉特征提取[J]. 江苏农业科学,43(1): 373-375. [Cui S G,Yang L L,Wu X L,Liang F. 2015. Extraction method of leaf vein for plant growth cabinet[J]. Jiangsu Agricultural Science,43(1): 373-375.]
刁智华,王会丹,魏伟. 2014. 机器视觉在农业生产中的应用研究[J]. 农机化研究,(3):206-211.[Diao Z H,Wang H D,Wei W. 2014. Summary of research on machine vision application in agricultural production[J]. Journal of Agricultural Mechanization Research,(3): 206-211.]
方政,胡晓辉,陈永,李兰凤. 2015. 基于图像处理的番茄识别方法[J]. 浙江农业科学,56(12): 38-43. [Fang Z,Hu X H,Chen Y,Li L F. 2015. Tomato recognition method based on image processing[J]. Journal of Zhejiang Agricultural Sciences,56(12): 38-43.]
杭腾,毛罕平,张晓东,胡静. 2015. 基于机器视觉的番茄长势信息无损检测的研究[J]. 农机化研究,37(11): 192-197. [Hang T,Mao H P,Zhang X D,Hu J. 2015. Nondestructive testing of tomato growth information based on machine vision[J]. Journal of Agricultural Mechanization Research,37 (11): 192-197.]
梁帆,杨莉莉,崔世钢,吴兴利,田立国. 2015. 图像处理技术在水培蔬菜生长监测中的应用[J]. 湖北农业科学,54(17): 4288-4291. [Liang F,Yang L L,Cui S G,Wu X L,Tian L G. 2015. Application of image processing technology in the monitoring of hydroponic vegetable growth[J]. Hubei Agricultural Sciences,54(17): 4288-4291.]
劉骥,曹凤莲,甘林昊. 2016. 基于叶片形状特征的植物识别方法[J]. 计算机应用,36(S2): 200-202. [Liu J,Cao F L,Gan L H. 2016. Plant identification method based on leaf shape features[J]. Journal of Computer Applications,36(S2): 200-202.]
彭红星,黄博,邵园园,李泽森,张朝武. 2018. 自然环境下多类水果采摘目标识别的通用改进SSD模型[J]. 农业工程学报,34(16): 155-162. [Peng H X,Huang B,Shao Y Y,Li Z S,Zhang C W. 2018. General improved SSD model for picking object recognition of multiple fruits in natural environment[J]. Transactions of the Chinese Socie-ty of Agricultural Engineering,34(16): 155-162.]
孙俊,何小飞,谭文军,武小红,沈继锋. 2018. 空洞卷积结合全局池化的卷积神经网络识别作物幼苗与杂草[J]. 农业工程学报,34(11): 159-165. [Sun J,He X F,Tan W J,Wu X H,Shen J F. 2018. Recognition of crop seedling and weed recognition based on dilated convolution and global pooling in CNN[J]. Transactions of the Chinese Society of Agricultural Engineering,34(11): 159-165.]
孙瑜,李占利. 2015. 基于射影几何的CCD相机几何模型研究[J]. 计算机工程,41(5): 270-273. [Sun Y,Li Z L. 2015. Research on geometric model of CCD camera based on projective geometry[J]. Computer Engineering,41(5): 270-273.]
吴天舒,张志佳,刘云鹏,裴文慧,陈红叶. 2018. 基于改进SSD的轻量化小目标检测算法[J]. 红外与激光工程,47(7): 47-53. [Wu T S,Zhang Z J,Liu Y P,Pei W H,Chen H Y. 2018. A lightweight small object detection algorithm based on improved SSD[J]. Infrared and Laser Engineering,47(7): 47-53.]
员伟康,木拉提·哈米提,严传波,阿布都艾尼·库吐鲁克,艾赛提·买提木沙,姚娟,杨芳,伊力扎提·阿力甫. 2016. 基于颜色和纹理特征的新疆维吾尔医植物药材图像特征提取与判别分析[J]. 中国中医药信息杂志,23(1): 78-81. [Yuan W K,Mulati Hamiti,Yan C B,Abu Du'eni Kuturuk,Asat Matmusa,Yao J,Yang F,Elzat Alip. 2016. Xinjiang Uygur medicine image feature extraction and discriminant analysis based on color and textural features[J]. Chinese Journal of Information on TCM,23(1):78-81.]
张书彦,张文毅,余山山,付宇超. 2017. 图像处理技术在信息农业中的应用现状及发展趋势[J]. 江苏农业科学,45(22): 9-13. [Zhang S Y,Zhang W Y,Yu S S,Fu Y C. 2017. Application and development trend of image processing technology in information agriculture[J]. Jiangsu Agricultural Sciences,45(22): 9-13.]
周云成,许童羽,邓寒冰,苗腾. 2018. 基于双卷积链Fast R-CNN的番茄关键器官识别方法[J]. 沈阳农业大学学报,49(1): 65-74. [Zhou Y C,Xu T Y,Deng H B,Miao T. 2018. Recognition method of tomato key organs based on dual convolution Fast R-CNN[J]. Journal of Shenyang Agricultural University,4(1): 65-74.]
吴天舒,张志佳,刘云鹏,裴文慧,陈红叶. 2018. 基于改进SSD的轻量化小目标检测算法[J]. 红外与激光工程,47(7):47-53. [Wu T S, Zhang Z J, Liu Y P, Pei W H, Chen H Y. 2018. A lightweight small object detection algorithm based on improved SSD[J]. Infrared and Laser Engineering,47(7):47-53]
Liu W,Anguelov D,Erhan D,Szegedy C,Reed S,Fu C Y,Berg A C. 2016. SSD:Single shot multibox detector[C]//Springer. European conference on computer vision:21-37. doi:10.1007/978-3-319-46448-0_2.
Wu J G,Zhang B H,Zhou J,Xiong Y J,Gu B X,Yang X L. 2019. Automatic recognition of ripening tomatoes by combining multi-feature fusion with a bi-Layer classification strategy for harvesting robots[J]. Sensors(Switzerland). doi:10.3390/s19030612.
(責任编辑 邓慧灵)
猜你喜欢
汉语世界(The World of Chinese)(2019年5期)2019-11-11
作文大王·笑话大王(2018年12期)2018-03-23
少儿科学周刊·少年版(2018年12期)2018-01-26
方圆(2017年20期)2017-11-03
新教育时代·教师版(2016年23期)2016-12-06
法制与社会(2016年32期)2016-12-01
软件导刊(2016年9期)2016-11-07
软件工程(2016年8期)2016-10-25
创新作文(5-6年级)(2015年9期)2015-10-21
红蜻蜓(2015年4期)2015-06-01