
STR260隧道掘进机在公路隧道施工中的应用
2020-03-20 07:18樊志家盖巍巍
中国新技术新产品 2020年2期
樊志家 盖巍巍
(三一重型装备有限公司,辽宁 沈阳 110141)
0 引言
以往的公路道路隧道主要依靠钻爆法进行施工,施工危险高、施工质量差、人员劳动强度大、施工效率低,隧道施工的机械化需求越来越强烈,以满足日益增长的公路道路建设需求[3]。隧道掘进机是集破岩、收料、运输、转运于一体的自动化隧道施工设备,包括绿色、环保、节能和高效等优点,在开挖隧道过程中,将周边居民及施工山体的植被等损害降到最低,实现基础设施建设与人及自然环境的和谐发展。
1 设备组成
STR260 隧道掘进机是针对公路隧道研发设计的隧道施工设备,主要是由切割机构、装运结构、主架体、支撑行走机构、转运机构及后配套运输机构组成的,设备通过切割机构的回转运动剥离山体岩石,装运机构通过回转的星轮及链条,将散落在其上的岩石物料运送至设备后方的转运机构及后配套运输机构,主架体及支撑行走机构是为了实现设备切割运输功能的结构部件。
1.1 切割机构
切割机构是由切割头、截割臂、截割减速机和截割电机等组成的。截割电机为单速水冷电机,截割电机与截割电机叉形架通过高强度螺钉连接,切割头为圆锥台型,在其圆周分布49 把镐形截齿,截割头通过内花键与截割臂相联。切割机构的工作原理是通过截割电机驱动截割减速机,带动切割头进行旋转运动,依靠镐形齿的切向运动对岩石物料进行剥离,实现开采挖掘工作。
1.2 装运机构
装运机构主要是由铲板部和第一运输机部组成的,铲板部负责装料工作,第一运输机负责将装载的物料运送到设备后方。装运机构依靠液压马达提供动力,通过星轮机构及刮板链机构对物料进行装载运输,第一运输机的理论输送能力要大于铲板部的理论装载能力,保证整个装运机构的连续稳定运行。
1.3 主架体
主架体主要是由回转台、本体架、平台托架和后支撑架组成的,各部件主要采用焊接结构,与各部分联接起到骨架的作用,需要承受各个功能部分对其产生的各种冲击载荷,是设备稳定运行的基础保障。
1.4 支撑行走机构
支撑行走机构是由支撑机构和行走机构组成的,支撑机构主要功能是在设备工作时,使设备整体稳定性及运行安全性在人体能接受的范围内,以免出现磕碰或跌落等生产安全问题;行走机构依靠液压马达驱动,带动链轮及履带,进行前进及后退作业。
1.5 转运机构
转运机构一般分为悬臂式第二运输机和牵引式第二运输机,2 种配置的依据是根据施工现场后配套运输情况及隧道尺寸及转弯角度选择,有时转运机构也通过加长第一运输机来实现物料转运功能。
1.6 后配套运输机构
后配套运输是根据用户方自己现场已有的设备情况进行选择,通常为中型自卸车、装载机及有轨矿车,很少有现场采用单侧皮带输送或者单侧刮板输送。
2 工程应用
2.1 工程概况
四川绵阳二环快速路葛家梁隧道项目是四川省城市快速道路建设重点项目,隧道长度为653 m,隧道为双向6车道连拱隧道,围岩等级跨度较大,地质水文条件较复杂,由于隧道长度、周边环境等因素的要求,项目采用STR260隧道掘进机进行施工。
2.2 施工方法
根据葛家梁隧道断面实际形状、围岩等级,结合选型施工设备技术参数,确定隧道开挖方式为台阶法,开挖方式如图1 所示。先开挖隧道上导洞,即隧道上方5 m 高度区域,期间出渣车在隧道掘进机后方,依靠加长一运直接落料至运输卡车内出料,同时在距离隧道施工工作面50 m左右距离同时进行仰拱施工,确保隧道初支形状及隧道成型尺寸。施工进度达到预定的单次开挖循环长度后,机器退到后方,工人在掌子面支护台车上进行初步支护,然后喷浆稳固。一个循环进行完毕后进入下一个循环。上道开挖一定距离后,机器退到下道施工,进行下发台阶的施工,完成隧道开挖工作。
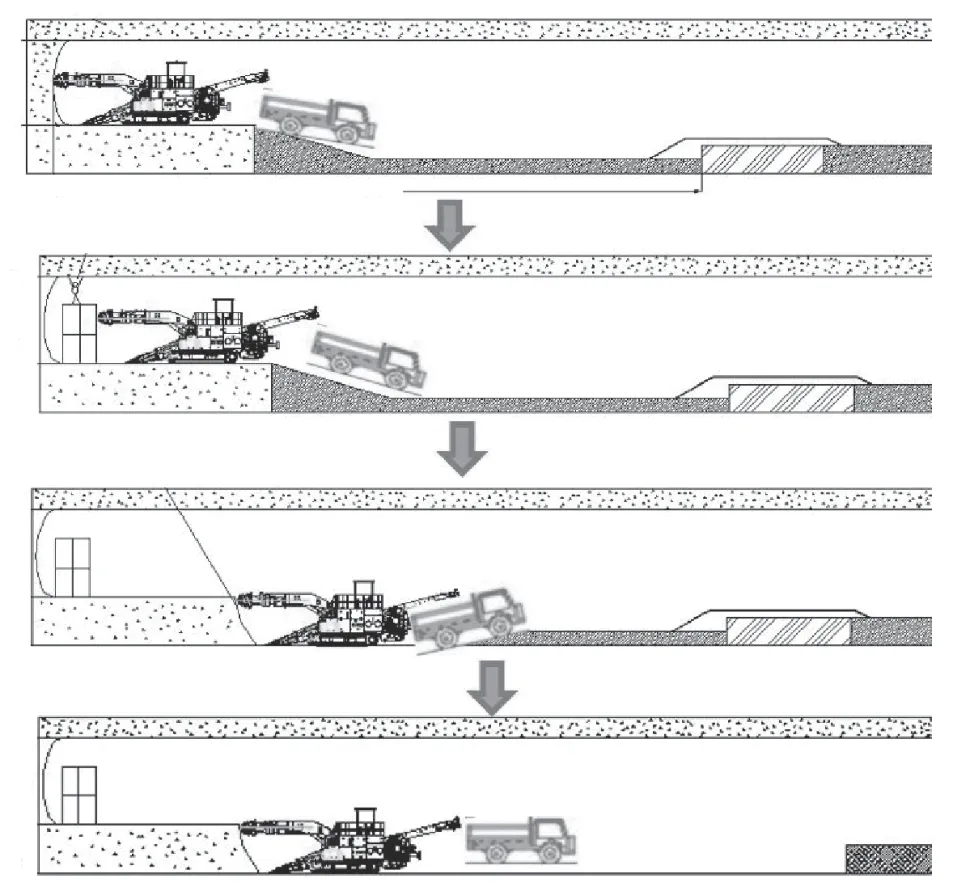
图1 台阶法施工示意图
2.3 施工效率影响因素
2.3.1 开挖循环长度
隧道掘进掘进机开挖循环长度受隧道开挖方法及岩体等级的制约,同时受到隧道地质状况及当地法律法规的影响,具体长度要根据现场工程师或隧道设计者的经验及计算来确定,但是我们给出不同条件下的一般推荐值,供施工参考。推荐开挖循环长度见表1。
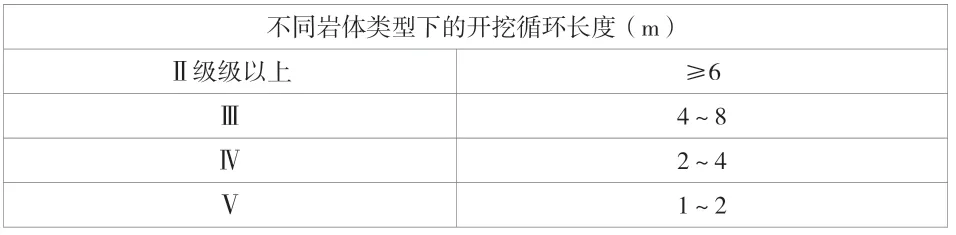
表1 推荐开挖循环长度参照表
2.3.2 除尘效果
隧道施工效率与除尘效果密切相关,采用隧道进机施工时,会形成由气体尘埃组成的浑浊空气,开挖过程中需要使用除尘设备,否则会严重影响施工安全及施工效率,因此采用掘进机施工时必须加装除尘设备,除尘设备的处理风量需根据隧道断面大小合理选择。除尘方式最好采用负压除尘(即吸出式除尘),如果隧道较长,可以在隧道内的适当位置增加送风机。安装除尘器后,浑浊空气经过风管被输送到除尘设备的过滤器,在过滤器内,满含粉尘的空气通过水浴式除尘,大粉尘和浑浊空气中的小粉尘经过水雾捕获,能够实现有效降尘。
2.3.3 轮廓控制
隧道的轮廓控制应采用激光制导控制系统,能够使操作员掘进得更加精确,并提高操作效率。隧道内安装7 个及以上激光制导指向仪,用于控制轮廓。每个激光制导指向仪会发射出1 条红色光束,能够长距离聚焦,从而给出及时和精确的轮廓参考信息,确保隧道开挖的直线前进,控制隧道的超挖和欠挖[2]。激光制导指向仪安装在初支隧道的装置上,由此获得需要的掘进方向。操作员按照光束掘进,就能够确保精确掘进。激光制导指向仪的特点是小巧轻便、坚固耐用且防水、耗能低、易于安装固定、定位指向距离远,尤其是在有瓦斯的情况下仍可安全可靠地使用。
2.3.4 岩石硬度
隧道掘进机施工成本主要来自于掘进机截齿的损耗,岩石硬度也决定了设备整体的工作效率,根据之前项目的经验及截齿的性能的理论计算,总结出隧道掘进机截割效率与岩石硬度对应关系,见表2,根据项目进度等因素综合考虑施工方法。

表2 岩石硬度与截割效率关系参照表
2.3.5 后配套运输系统
渣土运输也是限制隧道掘进机施工效率的重要因素,在施工时,后方可以直接采用加长一运加小型运输卡车出料,其中运输卡车车厢离地高度不得大于1.8 m,车厢进深2.5 m。同时要每隔200 m 开挖一个运渣车辆躲避硐室,在卡车出料时,能够和设备有错车空间;也可以采用悬臂二运加大型运输卡车出料,车高小于2.8 m,进深4 m,前端物料直接通过二运装载在运输卡车上,减少了挪车浪费的时间,提高后配套运输效率,进而提高设备的工作效率。
3 结语
在 “绿水青山就是金山银山”的时代背景下,绿色建设、绿色施工是隧道施工建设的必然发展方向[1],隧道掘进机施工有断面形成自由控制,掘进超欠挖控制好、围岩扰动小、对周边地质水文环境影响小、施工安全性高、节省人力成本等优点,在全国范围内得到广泛推广与使用。
猜你喜欢
环球时报(2023-01-29)2023-01-29
农业装备与车辆工程(2021年8期)2021-08-28
南方农机(2021年1期)2021-01-20
港口装卸(2020年3期)2020-06-30
现代营销·理论(2019年10期)2019-09-10
经济技术协作信息(2018年11期)2019-01-14
测控技术(2018年8期)2018-11-25
凿岩机械气动工具(2015年3期)2015-11-11
中国外汇(2015年3期)2015-01-01
对外经贸实务(2014年12期)2014-12-04
