基于兰姆波在非压电基板驱动油滴运动的实验
2020-03-12 01:06:10田昱鑫丁文政朱鹏飞
压电与声光 2020年1期
田昱鑫,梁 威,丁文政,朱鹏飞
(上海工程技术大学 机械与汽车工程学院,上海 201620 )
0 引言
随着工业技术的发展,声表面波(SAW)技术越来越多地被应用在各个领域,SAW生产的器件在移动通信、航空电子等领域均有应用前景。21世纪以来,使用SAW技术在微流体驱动上的应用发展迅速。
近年来研究[1-6]表明,通过压电单相转换器在玻璃上激发兰姆(Lamb)波可推动液滴在玻璃板上进行运动。姜立标等[7]基于微流驱动效应的优越性,提出了一种汽车前风挡玻璃振动除水技术。何希文等[8]基于SAW驱动机理设计和油滴与液滴的快速微混合器。邓明晰[9]基于Lamb波二次谐波的积分振幅作为评价参量,以实现对板材表面性质的准确评价。陈鹏等[10]对高阶兰姆波型微机电系统(MEMS)SAW谐振器进行仿真。章安良等[11-13]研究了在压电基片上液滴转换为微通道内微流体的方法及驱动液滴在球形表面运输的特性。在交通运输领域,道路交通工具的润滑系统是一个重要的组成部分,即润滑系统的好坏决定了道路交通工具的寿命及性能,SAW技术在此领域的应用仍有发展空间,若能将SAW技术运用于交通运输领域润滑系中,通过SAW激发Lamb波驱动润滑系统中的液体运动,将会获得更好的效果。目前,SAW技术驱动液滴的研究大多使用水滴或混合液体分离,并未对粘度较高的非水滴液体进行单独实验。为了研究SAW驱动粘度高于水的液体时的运动特性,并且能够对未来SAW运用于交通运输润滑系统中的参考,基于SAW的驱动机理,本文进行了利用压电陶瓷的逆压电效应激发Lamb波推动油滴运动的实验,探究了在1 mm钢板上,压电陶瓷激发Lamb波对油滴运动距离的驱动效果。
1 实验
1.1 数学模型
在具有角度的基板上,Lamb波驱动油滴运动的模型如图1所示。图中,Fs为矢量声流力,Fh为油滴运动阻力矢量,mg为重力,α为钢板倾斜角度。

图1 液滴沿倾斜钢板铺展的运动模型
油滴的下表面是光滑的钢板基底,上表面为液气界面,当Lamb波遇到油滴时,此时,在与油滴接触下,Lamb波为漏Lamb波,驱动油滴运动。其借助纳维-斯托克斯方程来描述油滴运动为
(1)

(2)

为表现普遍性,我们采用倾斜状态的钢板基板进行受力分析,油滴在其表面运动主要受3个力:
1) 驱动油滴运动的Fs。
2) 重力沿斜面的分量mg·sinα。
3) 阻止油滴沿钢板运动的Fh。
运用超声波驱动微流体的经典理论,即Nyborg教授的声流理论和Shiokawa教授的声流力理论[17]推导出:
β1kimagz)
(3)
β1kimagz)
(4)
式中:A为Lamb波幅度;ω为角频率;β1为衰减常数;kimag为Lamb波在液滴内的能量耗散系数;Fsx,Fsz分别为Lamb波在x、z方向上的单位体积力。
由油滴的接触角滞后产生的滞后阻力[18]为
Fh=kγL(cosθr-cosθa)
(5)
式中:θa,θr分别为油滴的前进角和后退角;γ为液-气界面张力;k为通过实验确定的无量纲常数;L为油滴沿斜面铺展的长度。
联合式(3)~(5)及重力在斜面上的分力,得出油滴在倾斜钢板上的运动表达式为
max=Fsx+mgsinα-Fh
(6)
maz=Fsz-mgcosα
(7)
从式(6)、(7)可知,油滴的运动将受到声流力、油滴体积和基板倾角的影响。
1.2 实验装置
本文实验是基于激发Lamb波的装置,其搭建设备包括1个厚1 mm的钢板、1个直流稳压电源、1个函数信号发生器、1个示波器、2片长方形压电陶瓷、1个SAW激发电路、数支0~50 μL微量移液器、1个单反相机。
1.3 实验方法
图2为实验装置示意图。由图可知,将所有装置进行连接,压电陶瓷用环氧树脂胶粘在钢板末端,冷却约24 h使其牢固,并用焊锡将导线焊在压电陶瓷激发端;然后将钢板固定在带有量角器的金属支架上,再将其放置于水平试验台上。每次实验均将钢板擦拭至无尘状态并重新滴上油滴,保证结果的准确性。油滴采用粘度等级为5w-30的全合成机油,实验温度为24 ℃。

图2 实验装置示意图
实验采用控制变量法,控制油滴体积及激发电压,基板倾角为变量,并分别设置对照组,每组实验均重复10次,然后取平均值,进而获得较准确的数据。
2 实验结果与讨论
2.1 油滴运动位移与基板倾角的关系
固定激发电压峰-峰值为115 V,分别取油滴体积10 μL、20 μL、30 μL,并在基板倾角0°、5°、10°、15°时进行实验,实验数据如图3所示。由图3(a)~(c)可知,随着运动时间的增加,油滴的运动距离呈现不断增加的趋势,并且基板倾角越大,其油滴运动位移增加越明显。图3(d)显示,随着基板角度的增大,油滴运动位移也在增大。油滴最开始的运动位移变化最明显,随着时间的加长,油滴位移变化逐渐减小。

图3 油滴运动位移与基板倾角的关系
由图3(d)可知,30 μL油滴的运动位移明显大于10 μL和20 μL的运动位移。当油滴体积为10 μL,钢板倾角为15°时,与钢板倾角为0°,5°,10°时相比,油滴运动位移增加更明显。
2.2 油滴运动位移与激发电压的关系
2.2.1 油滴运动位移在平面上与激发电压的关系
取液滴体积分别为20 μL和30 μL,设置基板倾角为0°,与地面保持水平,分别在激发电压峰-峰值为105 V、115 V、125 V、135 V、145 V时进行实验。平面上液滴与驱动电压的关系如图4所示。由图可知,当驱动电压越大时,油滴运动位移也越大;在激发电压峰-峰值为105~135 V时,油滴运动位移增幅明显,而在135 V、145 V时,油滴运动位移增幅较小。

图4 平面上油滴运动位移与激发电压的关系
2.2.2 油滴运动位移在斜面上与激发电压的关系
取20 μL和30 μL液滴,设置基板倾角分别为5°和10°,在激发电压峰-峰值分别为105 V、115 V、125 V、135 V、145 V时进行实验。油滴运动位移与驱动电压的关系如图5所示。由图可知,在斜面上,油滴的位移随着激发电压峰-峰值的增大而增大;在105~145 V时,油滴的运动位移均有较大增幅,且在单位时间内的运动速度更大,符合运动方程。


图5 斜面上油滴运动位移与激发电压的关系
通过实验得到油滴在平面和斜面上运动的最终位移,经过对比,在油滴运动时间相同的情况下,由于重力分力的作用,斜面上的油滴位移大于平面上的油滴位移(见图6)。
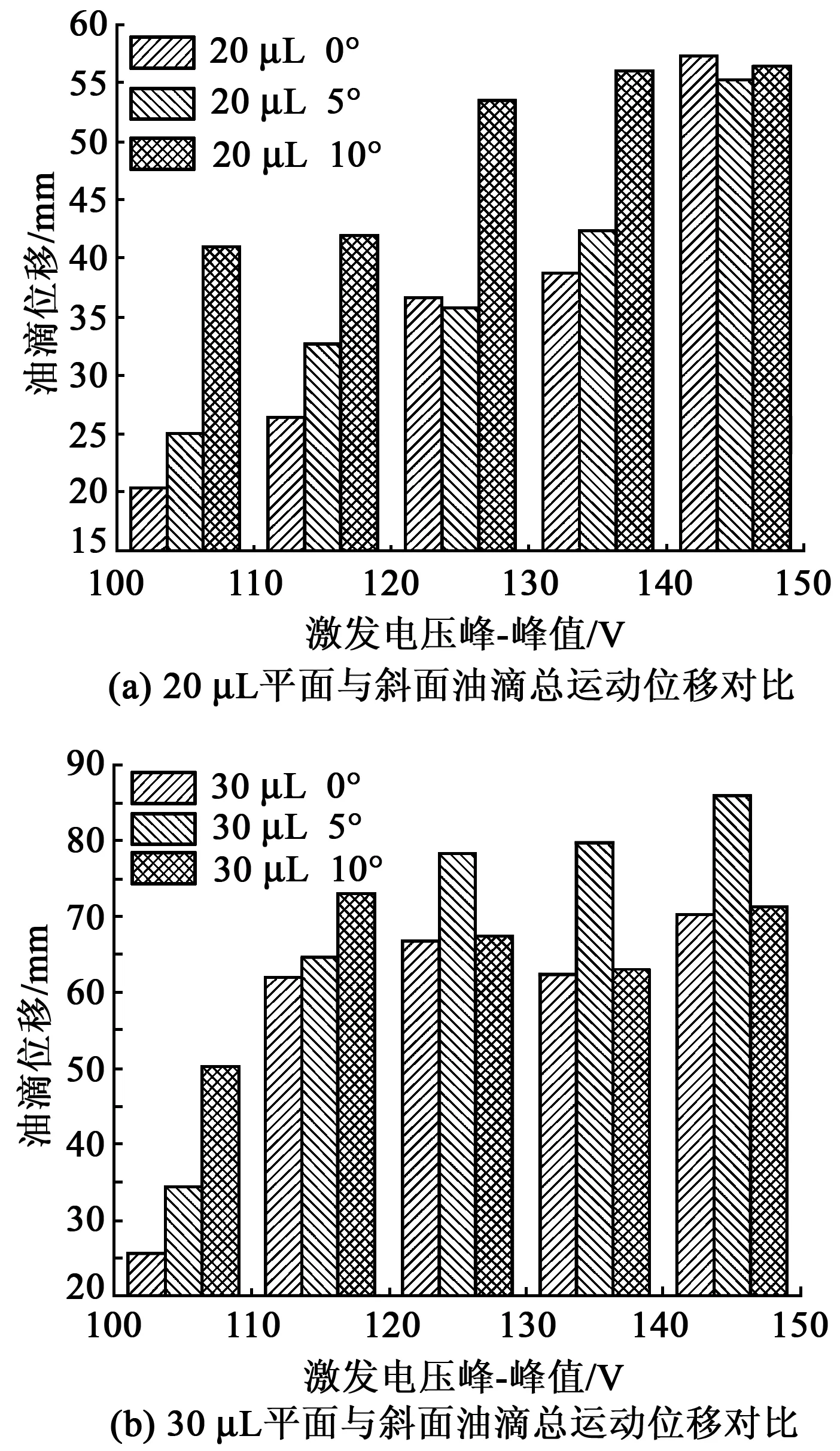
图6 平面与斜面油滴总运动位移对比
2.3 油滴运动位移与油滴体积的关系
将钢板倾角分别设置为0°和5°,激发电压峰-峰值设为115 V,分别在油滴体积为10 μL、20 μL、30 μL时进行实验。油滴在平面和斜面上的驱动油滴效果如图7、8所示。在斜面上的油滴运动位移明显大于平面上的油滴运动位移。在激发电压峰-峰值和基板角度一定时,油滴的体积增大,其运动位移也增大,30 μL体积的油滴运动位移明显大于10 μL和20 μL。

图7 油滴运动位移与油滴体积的关系

图8 不同基板倾角下油滴运动总位移与油滴体积的关系
3 结束语
利用压电陶瓷激发兰姆波作为驱动力进行了在金属钢板上的推动油滴实验。通过受力方程,分析了在油滴运动时,其激发电压、基板倾角和油滴体积对运动位移的影响,通过控制变量的方式,定量地给出了在这3种影响因素下油滴运动过程中的位移特性,基于兰姆波驱动以油滴为代表的粘度较高的微流体的运动上做出了探索,为进一步研究提供了实验和理论依据。
猜你喜欢
小主人报(2022年18期)2022-11-17 02:19:56
发光学报(2022年7期)2022-08-05 04:41:08
中学生数理化·八年级物理人教版(2021年6期)2021-11-22 07:49:48
中学生数理化·自主招生(2021年3期)2021-05-30 10:48:04
中学生数理化(高中版.高考理化)(2021年3期)2021-05-21 02:10:24
实验技术与管理(2020年7期)2020-09-29 08:44:20
科技创新导报(2016年1期)2016-05-30 09:38:13
中国塑料(2016年7期)2016-04-16 05:25:55
中学生数理化·高一版(2016年12期)2016-03-01 03:46:10
中国石油大学学报(自然科学版)(2015年2期)2015-11-10 06:07:47