在轨服务软体机器人应用展望*
2020-03-11 04:59:42岳晓奎
飞控与探测 2020年1期
岳晓奎,张 滕
(1.西北工业大学 航天学院·西安·710072;2. 西北工业大学 飞行动力学技术国家级重点实验室·西安·710072)
0 引 言
对在轨航天器进行维修、加注、升级等在轨服务操作,符合国家未来10年航天事业发展的需求。现有用于在轨服务的空间机器人系统主要采用刚性机械臂与刚性抓捕装置,刚性装置在执行任务过程中存在着接触力过大等问题会给航天器造成安全风险。软体机器人由于自身的结构特点,可被动实现接触过程中的柔顺性,具有机械智能。本文以软体机器人中的软体抓捕装置为例,分析了软体机器人用于在轨服务的可行性,介绍了软体抓捕装置的国内外发展现状,提出了软体机器人在在轨服务应用中的建议,为软体机器人用于在未来的在轨服务任务奠定基础。
1 在轨服务软体机器人的可行性
空间机器人末端执行器是其重要组成部分,直接参与抓捕和操作目标,其可靠性和稳定性是完成空间在轨服务任务的保证。现有空间机器人抓捕装置主要为刚性结构,包括两指抓捕装置、仿生灵巧手、锥孔式对接机构等。刚性装置在抓取目标时,若不对其与机械臂进行精细控制,可能会造成抓捕过程冲击过大,给在轨服务机器人与目标带来结构损伤,甚至造成解体。因此需要结合力反馈信息对机械臂和抓捕装置进行精细控制以减弱抓捕过程中碰撞的影响,这给传感器和控制器系统带来了额外的负担,降低了系统的鲁棒性与可靠性。软体机器人利用其结构柔顺的特点,可被动实现接触过程中的柔顺接触,特别适宜于抓捕、操作易碎目标与人机交互等应用场合。近些年来,受到了广泛的关注,相关研究领域产生了大量的研究成果。刚性抓捕装置与软体抓捕装置的主要特性对比如表1所示。
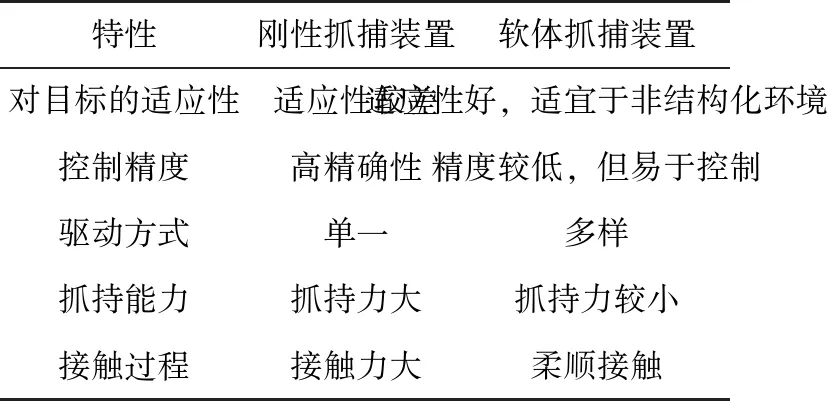
表1 刚性抓捕装置与软体抓捕装置主要特性对比Tab.1 Comparison of main characteristics between rigid and soft grippers
从表中可以看到,相比较于刚性抓捕装置,软体抓捕装置具有适应性好、驱动方式多样和柔顺接触等优点,能够在复杂的非结构化环境下工作。利用软体机器人执行空间在轨服务任务,可在复杂的空间环境下进行抓捕、维修等多类任务,可以提升任务的鲁棒性与可靠性。美国喷气推进实验室(Jet Propulsion Laboratory,JPL)与相关高校正展开针对空间应用的软体机器人的研究,并产生了丰富的研究成果。
2 软体抓捕装置发展现状
软体机器人最初起源于McKibben型气动肌肉,随着美国哈佛大学Whitesides教授在2011年提出的气动网格型软体抓捕装置[1],如图1所示,软体机器人的研究在近些年内得到了迅猛的发展。

图1 气动网格型软体抓捕装置[1]Fig.1 Pneumatic soft gripper[1]
气动网格型软体抓捕装置采用正压流体的驱动方式,主体由单一材料组成,通过独特的结构设计,当驱动作用时,抓捕装置对应的软体手指包裹目标,实现对目标的抓取。针对软体抓捕装置的研究,主要包括结构设计、驱动方式、提升抓持力、提升装置自感知能力等方面。
2.1 结构设计
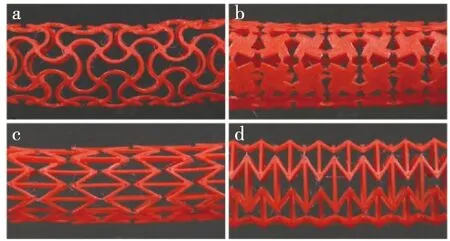
结构设计主要是基于仿生原理、折纸机构与剪纸机构等智能机构,通过设计具有独特结构特点的软体抓捕装置,从驱动性能、抓持能力等方面提升软体抓捕装置的性能。根据仿生原理,Crooks等提出了仿鱼鳍效应软体抓捕装置[2],其利用自身结构特点,在仅采用单一驱动器的前提下,可实现抓捕表面自适应目标表面。其可以采用传统刚性抓捕装置的驱动方式,实现精确控制。在此基础上,设计了一种辅助假肢,用于帮助残障人士抓取物体[3]。Khaled等通过优化3D打印参数,研制了一种具有层阻塞效应的软体抓捕装置,在不依靠外界激励的情况下,实现了抓持能力的显著提升[4],仿鱼鳍效应软体抓捕装置的相关研究成果如图2所示。哈佛大学Li等提出了一种基于折纸机构的负压驱动软体抓捕装置,该装置具有结构简单等优点,在负压流体的驱动下,可以抓持大质量的目标[5],如图3(a)所示。Kan等利用折纸原理,研究了一种单片抓捕装置,如图3(b)所示,通过3D打印可以直接制备出相应的机构,能够实现快速、低成本、高效生产[6]。Simons等基于剪纸原理,研究了一种具有负泊松比的机构,可用于制备软体抓捕装置[7]。
2.2 驱动方式
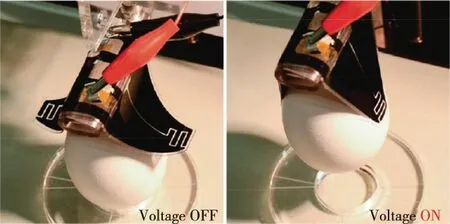
相比较于刚性抓捕装置主要采用电机的驱动方式,软体抓捕装置的驱动方式具有多种多样的形式。与人手指弯曲的情况类似,Manti等采用绳系的方式以驱动软体手指,利用系绳的拉力控制软体手指的曲率,实现对目标的抓取与释放[8]。形状记忆合金丝在受热时长度将缩短,Rodrigue等利用这个现象,设计了利用形状记忆合金驱动的软体抓捕装置[9]。介电弹性体在两端收到强电场作用时,会沿着电场方向发生形变,为此,Vito等研制了基于介电弹性体执行器的软体抓捕装置[10],通过控制电场强度,改变装置的弯曲程度,实现对不同目标的有效抓捕,该装置具有结构简单、使用广泛的特点,可用于抓持鸡蛋等易碎目标。Skfivan等通过主动控制外部磁场,研制了一种基于磁流变弹性体的软体抓捕装置[11]。利用低沸点液体在较短的加热时间内可大量挥发的特点,继而增大腔体内部的压强,基于此,Garrad等设计了一种利用低沸点液体的软体执行器[12]。部分研究成果见图4。此外,软体抓捕装置还可以采用光驱动与溶剂驱动等形式[13-14]。
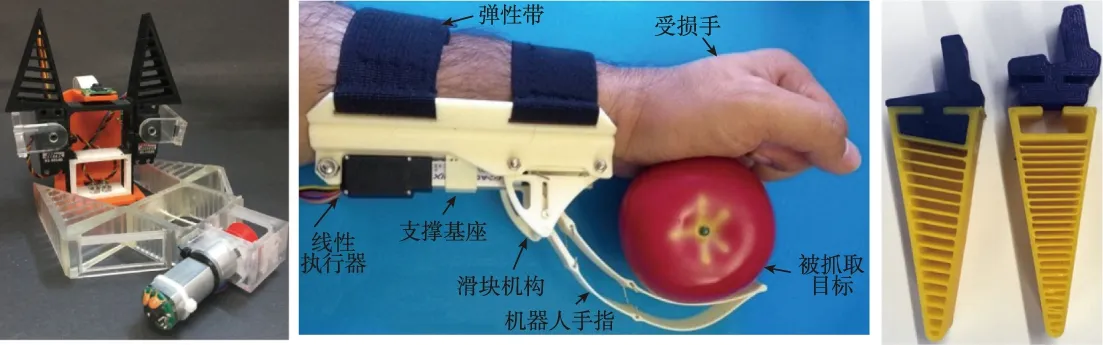
图2 仿鱼鳍效应软体抓捕装置及其拓展[2-4]Fig.2 Fin Ray effect gripper and its extensions [2-4]
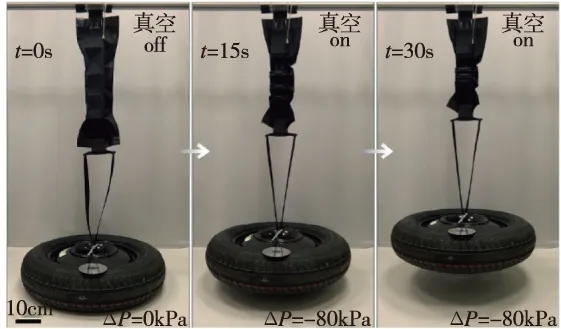
(a) 流体负压驱动抓捕装置[5]

(b) 单片抓捕装置[6]
(c) 负泊松比机构[7]图3 流体负压驱动抓捕装置与单片抓捕装置Fig.3 Fluid negative pressure driven catching device and single-chip catching device
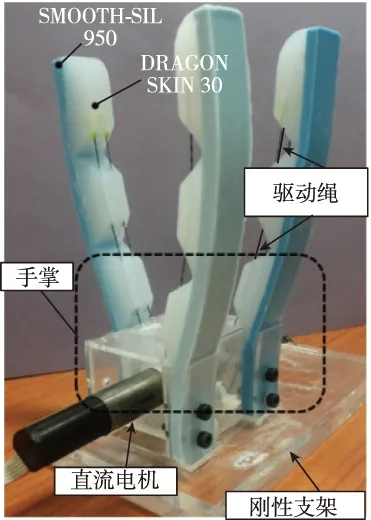
(a) 绳系驱动软体抓捕装置[8]
(b) 磁流变弹性体的软体抓捕装置[11]
(c) 基于低沸点液体的软体抓捕装置[12]图4 不同驱动形式的软体抓捕装置Fig.4 Soft gripper with different actuation methods
2.3 抓持力提升
传统单一形式的软体抓捕装置,自身的结构特点给其带来了接触柔顺特性,但同时也带来了其抓持力不足的缺陷。针对此不足,学者进行了大量的研究,主要的方式包括有变刚度机构和与黏附技术相结合两大类。变刚度机构通过外部可控激励实现机构刚度的主动控制,在软体抓捕装置接触目标时,机构刚度较低,抓捕机构仍然具有结构的柔顺性,可被动实现柔顺接触。当碰撞发生之后,通过主动施加外界激励,显著提升结构刚度,继而增加装置的抓持力。典型的变刚度机构主要有阻塞机构、低熔点金属和电流变和磁流变流体等。阻塞机构主要包括层阻塞与颗粒阻塞两类,二者都是通过改变外界激励来改变层或者颗粒之间的摩擦力,继而主动改变机构的刚度。
Brown等人利用颗粒阻塞机构,设计了一种广义抓捕装置[15],如图5,该装置对具有不同几何特征的目标都具有可靠的抓捕能力,该装置主要由外部气囊和内部颗粒组成,外部气囊用于隔绝外部环境,保证内部的气密性,内部颗粒可以是咖啡粉末等颗粒,采用真空气泵作为驱动器。当装置接触目标时,驱动器不工作,气囊内部压强与大气压强一致,颗粒之间摩擦力较小,可自由移动,因此在接触时可自适应目标表面;接触完成后,驱动器工作,气囊收缩挤压颗粒,颗粒之间摩擦力显著增大,实现对目标的可靠抓捕。

(a)

(b)
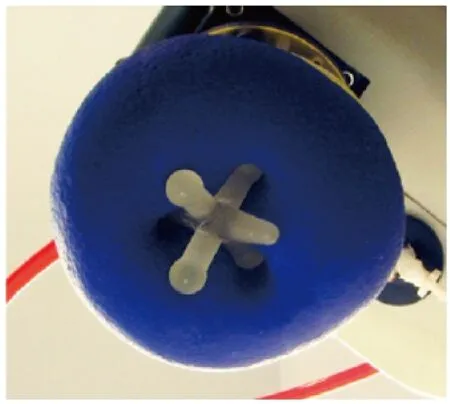
(c)图5 广义抓捕装置Fig.5 Universal soft gripper
鱼鳞具有多层结构,受此启发,Kim等提出了一种依靠绳系驱动的多层阻塞机构,通过主动改变系绳的拉力,实现刚度的主动控制[16]。与文献[15]中的原理类似,Narang等利用负压作为层阻塞机构的激励源,通过改变内部压强改变每层之间的压力[17],继而改变每层之间的摩擦力,达到改变刚度的目的,并基于有限元仿真分析结果与实验结果建立了层阻塞机构的力学模型。利用静电吸附力改变每层电极之间的摩擦力,Wang等设计了高压电驱动的层阻塞机构,通过改变电场强度可以实现摩擦力的主动控制[18]。低熔点合金指熔点低于232℃的合金[19],具有导热性好的优点,可快速改变温度继而在液态与固态之间转换。Wang等利用低熔点合金研究了一种变刚度机构,并将其用于软体机器人,研究了一种变刚度软体机械臂[20]。电流变和磁流变流体是一种新型功能材料,通过外加磁场或电场可以改变材料弹性模量等结构特性参数达到主动改变机构刚度的目的[21]。

(a) 静电吸附与电磁吸附抓捕装置
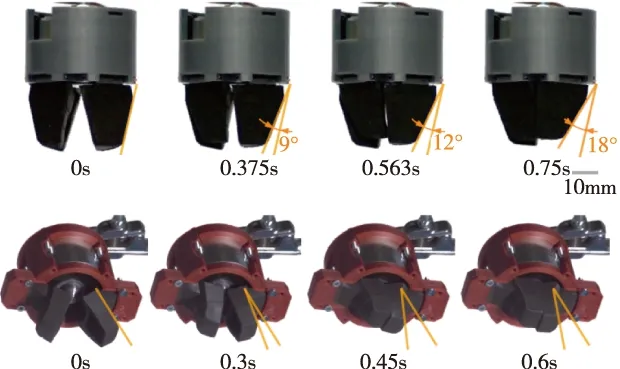
除了可变刚度机构外,研究人员还将黏附技术应用于软体抓捕装置,以提升对目标的抓持力。在地面环境,真空吸附方式被广泛应用,其具有吸附力大、清洁、高效等优点,为此,德国Festo公司将其与气动驱动的仿象鼻抓捕装置相结合,研制了一种可实现可靠抓持多种不同目标的软体抓捕装置[22]。静电吸附源于静电感应原理,可在两个接触表面之间产生吸附力,具有对目标表面要求低、使用环境不受限、应用范围广等优点,其采用高电压、低电流的驱动方式。电磁吸附采用低电压、高电流的驱动方式,依靠电磁场产生磁力。Guo等通过合理设计电极,研究了一种同时具有静电吸附和电磁吸附两种黏附方式的柔性抓捕装置,如图6(a)所示,针对不同的目标可以主动切换黏附方式[23]。介电弹性体执行器和静电吸附均通过高压直流电作为驱动源,Shintake等将介电弹性体执行器和静电吸附相结合,通过巧妙的柔性电极设计,得到了同时具有二者特性的软体抓捕装置,如图6(b)所示,可抓取不同的目标[24]。
(b)介电弹性体与静电吸附软体抓捕装置图6 利用静电吸附的软体抓捕装置Fig.6 Soft gripper with electrostatic adhesion
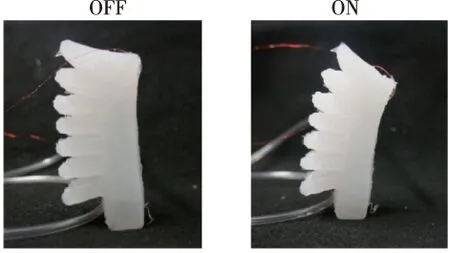
仿生黏附材料主要以仿壁虎黏性材料为代表,Glick等人将仿壁虎黏性材料与气动网格型软体末端执行器相结合,将其布置在抓捕面上,通过增加摩擦黏附力提升抓捕机构的最大抓持力[25]。Zhang等将具有热响应特性的仿壁虎黏性薄膜与软体抓捕装置相结合,通过内嵌的加热薄膜与温度传感器,提升了对具有光滑表面和粗糙表面目标的抓持能力,且实现了抓持力之间的主动切换[26]。
由于软体抓捕装置独特的优点,JPL进行了大量的研究,其中以研究员Aaron Parness所在团队取得的成果最为显著。针对仿壁虎黏性材料与软体抓捕装置的结合,除文献[25]介绍的成果外,还将仿壁虎黏性薄膜与静电吸附薄膜相结合,研制了一种新型吸附装置,并在失重飞机上进行了“零重力”实验[27-28]。
2.4 智能化
近些年,柔性电子技术发展迅速,柔性传感器大量出现,提升了软体抓捕装置的自感知能力。Sundaram等将力敏薄膜与传统手套相结合,实现了对手套抓捕目标过程中的多点接触力测量,将所测量的多点接触力输入到卷积神经网络中,实现了对目标几何参数的辨识[29]。Elgeneidy等在软体抓捕装置抓捕面直接3D打印柔性应变传感器,实现了抓捕装置曲率与接触状态的测量[30]。Gu等将水凝胶与柔性薄膜相结合,研究了一种新型智能皮肤,可以实现对于手势的主动测量[31]。

图7 魔术贴型仿生软体抓捕装置Fig.7 Soft gripper with velcro-like adhesive
3 软体机器人用于在轨服务的建议
软体抓捕装置具有结构柔顺、功能多样等优点,可以适应不同类型的在轨服务任务。此外,软体抓捕装置具有机械智能化的特点,符合现有空间任务智能化的发展方向。由于空间环境的复杂性,将软体机器人用于在轨服务任务需要考虑空间环境的特点与不同任务的约束条件,主要包括如下几个因素:
(1) 空间具有真空的特点,对驱动方式提出了更高的要求,传统采用负压驱动方式的软体机器人无法在太空中使用;
(2) 空间环境强辐射特性以及对软体机器人材料提出了更高的要求;
(3) 出于发射成本的考虑,需要软体机器人能够执行多种不同的任务,并具有升级空间,能够满足未来的使用需求;
(4) 软体机器人应具有更强的自感知能力,能够测量任务过程中的多物理量,继而实现对环境的感知,同时测量量也能够用于提升机器人的控制精度,实现精细操作。
4 结 论
软体抓捕机构作为一种新型抓捕机构,具有可靠性高、鲁棒性强、功能多样等优点,能够避免现有刚性抓捕装置带来的许多不足之处,在未来的在轨服务任务中发挥巨大的应用价值,具有广泛的应用前景,能够提升在轨服务任务的智能化程度。
猜你喜欢
军事文摘(2024年4期)2024-01-09 09:07:58
汽车实用技术(2022年7期)2022-04-20 11:45:04
上海交通大学学报(2021年2期)2021-03-02 10:17:22
房地产导刊(2020年11期)2020-12-28 01:32:30
军事文摘(2020年24期)2020-11-29 06:35:54
铁道通信信号(2019年4期)2019-10-10 03:42:56
通信电源技术(2016年1期)2016-04-16 04:57:31
少儿科学周刊·少年版(2015年4期)2015-07-07 21:13:44
少儿科学周刊·少年版(2015年4期)2015-07-07 21:09:31
少儿科学周刊·少年版(2015年4期)2015-07-07 21:08:08