基于ANSYS 的高速动车组制动控制装置翻转台有限元分析和优化设计
2020-03-08 09:49:22江涛
机电产品开发与创新 2020年1期
江 涛
(南京中车浦镇海泰制动设备有限公司, 江苏 南京 211800)
0 引言
现有翻转台为固定式翻转台, 在固定式翻转台上进行整个制动控制装置(大风缸、气路板、侧护箱、下护箱等)的组装。 当制动控制装置组装完成后,会在制动控制装置自动实验装置上对整个制动控制装置进行试验,完成后将其存放到制动控制装置成品区。 但是从固定式翻转台组装到制动控制装置成品区的过程比较复杂, 整个过程比较费人费时,很多地方工序重复,不符合精益生产的理念。 因此,优化设计移动翻转台。 本文主要基于ANSYS 有限元分析方法, 以铁路相关行业标准为判定依据,对翻转台强度进行仿真分析,并优化设计了移动翻转台。
1 翻转台的结构设计
根据已有移动翻转台的结构, 在对其进行改造设计后如图1 所示,主要将其分为底座和翻转机构两部分,底座,见图2,主要由左支架、右支架,底横梁、脚轮、轴承座、万向轮和驱动轮组成,翻转机构,见图3,主要由左拉杆、右拉杆、上横梁和吊杆组成。 其中左支架和右支架,见图4,由左梁、右梁、顶梁和底梁组成。

图1 移动翻转台Fig.1 Moving roll-over table

图2 底座Fig.2 Pedestal

图3 翻转机构Fig.3 Dumping gear

图4 左支架和右支架Fig.4 Left and right stents
1.1 零件材料及连接
左梁和右梁,顶梁和底梁采用矩形型钢;底横梁采用方形型钢;左拉杆、右拉杆和顶横梁采用矩形型钢;各型钢材料采用Q235B 碳素结构钢;底座和翻转机构采用轴承; 左右支架各零件之间和两个吊杆和上横梁主要采用焊接连接,左右支架和底横梁、左右拉杆和上横梁、脚轮万向轮和左右支架连接采用螺栓连接。
1.2 零件尺寸及技术要求
根据实际使用翻转台的经验、 制动控制装置组装要求及使用方便、 结构安全稳定及使用轻便等要求,确定移动翻转台各个零件的尺寸和技术要求。图5 为吊装制动控制装置的移动翻转台,制动制动装置通过螺栓与翻转机构的吊杆相连。

图5 吊装制动控制装置的移动翻转台Fig.5 Moving roll-over table wit lifting btake control device
2 载荷强度分析
为保证其使用安全,需对移动翻转台强度进行校核,使用ANSYS 有限元分析软件对其进行强度分析。 选择制动控制装置在翻转台上出现应力和变形最大的位置点(以翻转机构吊着制动控制装置转动位置为准,垂直于水平面±90°、平行于水平面±0°),直接在吊杆上施加制动控制装置的重量,焊接件和螺栓连接之间采用Bonded 绑定接触模拟,脚轮和万向轮固定不动进行分析,其应力和变形结果如图6~13 所示。 从图中可以看出,以上四种情况下的应力和变形在安全值范围以内, 说明设计符合翻转台载荷强度的要求。

图6 变形图(翻转机构垂直于水平面90°)Fig.6 Deformation diagram(perpendicular to horizontal plane 90°)

图7 应力图(垂直于水平面90°)Fig.7 Stress diagram(perpendicular to horizontal plane 90°)
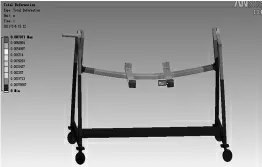
图8 变形图(垂直于水平面-90°)Fig.8 Deformation diagram(perpendicular to horizontal plane -90°)

图9 应力图(垂直于水平面-90°)Fig.9 Stress diagram(perpendicular to horizontal plane -90°)

图10 变形图(垂直于水平面0°)Fig.10 Deformation diagram(perpendicular to horizontal plane 0°)

图11 应力图(垂直于水平面0°)Fig.11 Stress diagram(perpendicular to horizontal plane 0°)

图12 变形图(垂直于水平面-0°)Fig.12 Deformation diagram(perpendicular to horizontal plane-0°)

图13 应力图(垂直于水平面-0°)Fig.13 Stress diagram(perpendicular to horizontal plane-0)
3 翻转机构转动设计
通过现场测试现有翻转台,可知翻转装置的转速,其满足制动控制装置的装配要求, 因此新设计移动翻转台的翻转装置,见图14,转速也设定为相同转速;通过电动机带动移动翻转台的翻转装置转动,由无级变速器和蜗轮蜗杆减速器减速实现移动翻转台的转速。

图14 翻转机构转动电机安装图Fig.14 Dumping gear rotating motor installation diagram
控制电路设计:控制电路的电压为220V,根据移动翻转台工作的特点,电机的转动只需要正反转点动,所以控制电路设计如图16 所示。 由图16 转动电机控制原理图所示,合上总开关S,整个电路得电, 按下按钮SB1,交流接触器KM1 线圈得电,主触点闭合,电机正转,常闭触点断开,反转电路失电,防止电路短路;按下按钮SB2, 交流接触器KM2线圈得电,主触点闭合,电机反转,常闭触点断开,正转电路失电。

图15 电动机、无级变速器和蜗杆涡轮减速器Fig.15 The motor,non-polar transmission and worm gear reducer
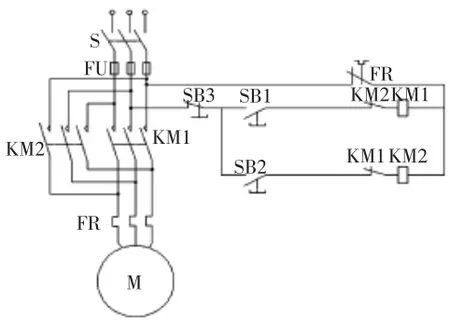
图16 转动电机控制原理图Fig.16 Control schematic diagram of rotating motor
4 翻转台移动设计
由图17 移动翻转台设计图所示, 移动翻转台移动设计采用电动驱动轮带动翻转台移动,驱动轮安装在左支架前面的弯板下,弯板焊接在左支架的底梁上,拉动移动翻转台移动,在右支架安装万向脚轮通过扶手认为控制移动翻转台的方向, 电动驱动轮由控制器和加速手柄控制。 最终使用状态示意图如图18 所示。

图17 移动翻转台设计图Fig.17 The design of moving roll-over table
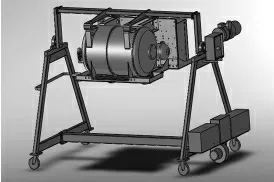
图18 移动翻转台最终状态Fig.18 Final state of moving roll-over table
5 结论
经过对高速动车组制动控制装置翻转台进行有限元分析,其结构满足安全要求;并优化设计为移动翻转台,设计可行,稳定性好,节省了很多人力和时间,提高了制动控制装置生产效率。
猜你喜欢
青少年科技博览(中学版)(2023年1期)2023-03-17 00:44:38
中国特种设备安全(2022年8期)2022-10-09 10:08:10
科学技术创新(2021年27期)2021-10-18 08:57:54
锻压装备与制造技术(2021年3期)2021-08-13 08:39:54
中学数学杂志(高中版)(2016年6期)2017-03-01 18:51:01
铁道机车车辆(2016年3期)2016-10-25 09:02:43
中学生数理化·高一版(2016年2期)2016-05-30 10:48:04
三联生活周刊(2015年42期)2015-10-17 10:44:41
中国科技产业(2015年10期)2015-01-29 19:10:50
新高考·高一物理(2014年1期)2014-09-18 15:33:33