
基于渐次目标跟踪的大气候箱防结露控制方法*
2020-03-05 07:31:32郑焕祺周玉成
林业科学 2020年1期
郑焕祺 朱 科 周玉成
(1. 山东建筑大学信息与电气工程学院 济南 250101; 2. 山东建筑大学热能工程学院 济南 250101)
人造板及其制品释放的甲醛严重影响人类身体健康,气候箱法作为国际通用的检测方法被广泛采用(王正国等, 2015; 尹梦婷等, 2018)。根据气候箱容积不同,可将检验方法分为小室法(容积≤1 m3)和大室法。大室法气候箱能够最大限度模拟人造板及其制品实际使用时的环境,并可避免对人造板制品的破坏性取样。世界各国纷纷以法律或强制性标准形式规定使用大气候箱法进行人造板及其制品甲醛的释放量检测,如国际标准化组织使用ISO 16000-9标准,欧洲采用EN 717-1标准,美国加利福尼亚州以立法形式规定检测标准为ASTM E 1333(吴盛富等, 2008),我国则推行GB/T 33043标准。在大气候箱的设计和控制系统研究中,20世纪40年代末期Went(1949)建立了世界上第一个人工气候室(Phytotron),对温度、光照等环境条件进行控制; Zhang等(1992)设计了一个全尺寸测试室,用于研究室内温度控制; Lawless等(1996)设计并构建了一个8 m3动态气候箱。相较于国外,刘鑫钰等(2013)研制了30 m3气候箱用于甲醛释放量检测环境控制; 刘巍巍等(2010)、Wei等(2014)建立了30 m3全尺寸环境舱对通风法和密闭法测试VOCs需要的环境条件进行控制; 李辉(2010)建立了大型可分割环境试验舱进行温湿度稳定性控制测试; Que等(2013)采用美国大室法标准的要求,对大气候箱的温度和湿度进行控制。但现有的大气候箱,在达到检测条件过程中均易出现雾和结露现象。甲醛易溶于水,气候箱内结露产生的水吸收甲醛后,空气中的甲醛含量呈下降趋势,会使人造板及其制品甲醛释放量的检测结果不准确;同时,现有大气候箱达到检测条件的时间较长,能源消耗严重且稳态精度不高。鉴于此,本研究提出渐次目标跟踪算法,进行变参数PID控制,实现大气候箱温湿度控制过程中不出现雾和结露现象,缩短达到检测条件的时间,使大气候箱满足人造板及其制品甲醛释放量检测的高精度要求。
1 气候箱结露分析及防结露约束控制目标
1.1 气候箱结露分析
在标准大气压下,空气中含有一定量水蒸气,当空气中的水蒸气达到饱和状态,即相对湿度达到100%时,若此时温度下降,则空气中会出现过饱和水汽凝结并析出的现象,该现象称为结露,当有结核时形成雾,没有结核时在物体表面遇冷形成露,出现结露的温度称为在此温度和相对湿度条件下的“露点温度”(戴路玲, 2016)。
气候箱结露的原因是因为进行箱内调温调湿时,气候箱内表面式冷却器为了降低气候箱内温度,需要以更低的温度运行,当表面式冷却器的温度低于此刻气候箱内的露点温度时,冷却器表面会形成结露,如图1所示,图中方框内为凝结出的水珠; 当露点湿度发生器向气候箱内输送饱和湿空气时,若吹进气候箱的空气温度低于此刻的露点温度,则低温空气会在气候箱内壁的不锈钢表面上形成结露,如图2所示,图中方框内为凝结出的水珠; 此外,气候箱内温度下降且室内湿度升高,当相对湿度达到饱和时,气候箱内同样会出现结露现象; 将气候箱置于露天场地时,极端低温环境影响气候箱初始内壁温度,湿热气流遇到气候箱内壁的冷界面同样也会形成结露。
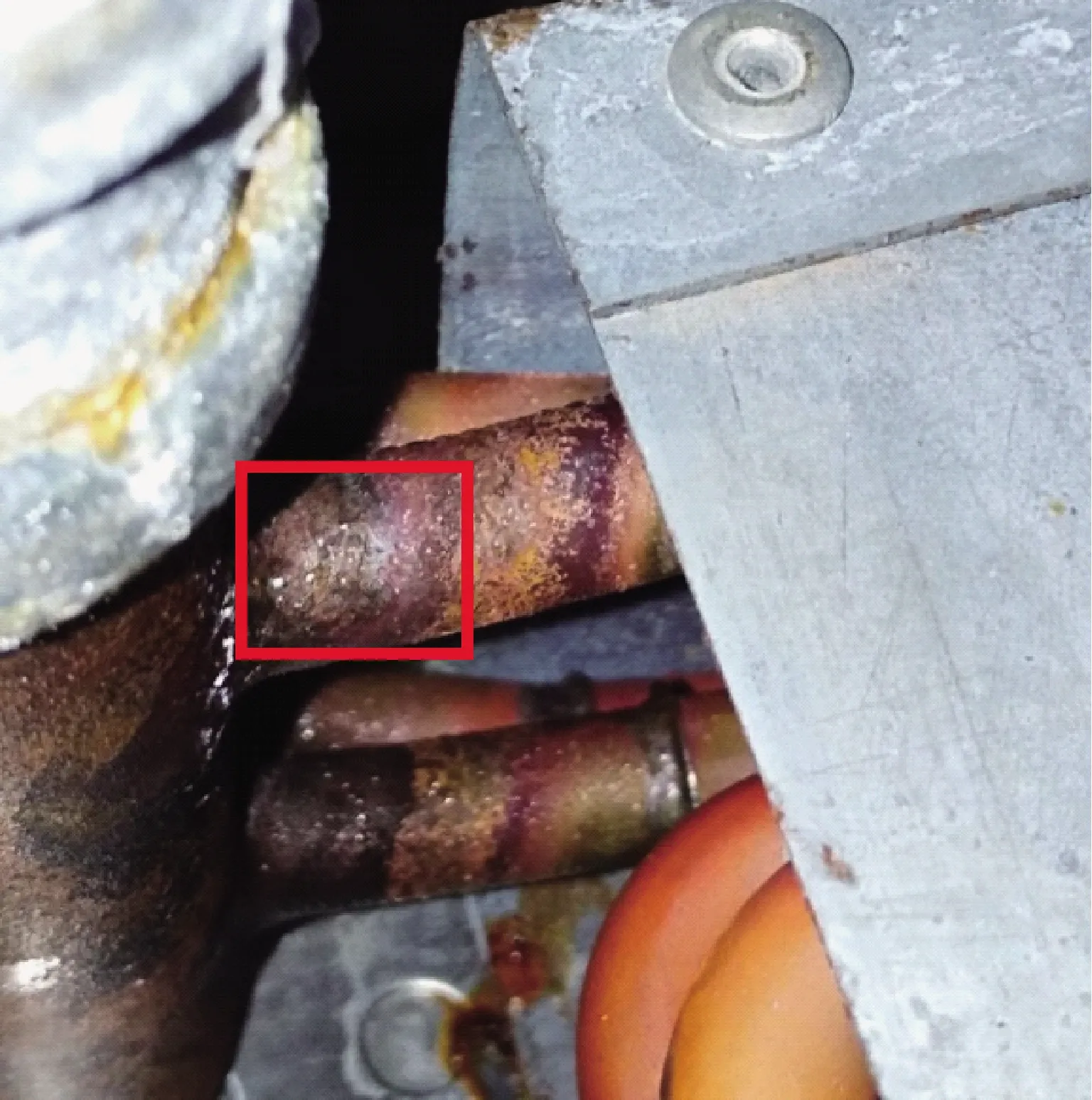
图1 表面式冷却器表面结露现象Fig.1 Condensation phenomenon on surface of surface cooler
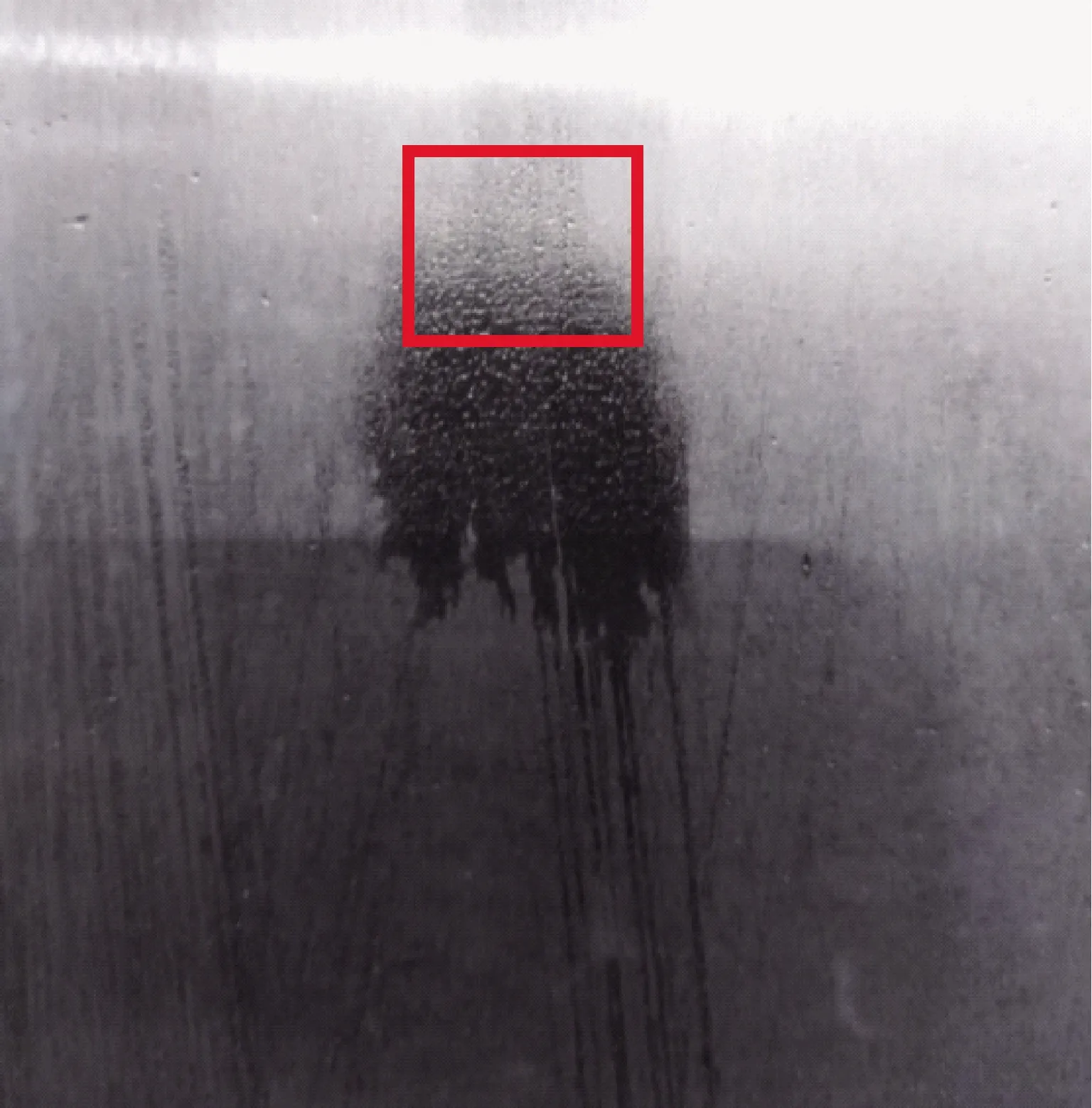
图2 气候箱内壁不锈钢表面结露现象Fig.2 Condensation phenomenon on stainless steel surface inside chamber wall
1.2 防结露约束控制目标
为防止产生结露现象,本研究提出约束目标如下:
1) 防止表面式冷却器结露,提出低温饱和水汽约束控制法,即确保低温饱和水汽的温度低于表面式冷却器的温度。约束目标为:
{t|TT(t)>TDew(t),t=0,1,2,…}。
式中:TT(t)为表面式冷却器的温度;TDew(t)为t时刻气候箱内的露点温度。
2) 防止露点湿度发生器向气候箱内输送饱和湿空气引起结露,提出受限饱和湿空气约束法,使整个控制过程进气的露点温度高于气候箱内的结露温度,即:
{t|TH(t)>TDew(t),t=0,1,2,…}。
式中:TH(t)为露点饱和湿空气的温度。
3) 对于外界环境变化引起的气候箱内部结露,采取将气候箱主体部分置于室内的方法,保障一个相对稳定的外部环境,解决检测室内壁初始状态温度受外界影响的问题。
2 渐次目标跟踪算法及变参数控制设计
常用的大气候箱容积为30 m3,在确保室内温度23±2 ℃、相对湿度50%±5%(ISO 16000-9中8.1条)、被测样品表面空气流速0.1~0.3 m·s-1的条件下,每小时气候箱内向外部换气30 m3。约束目标的确定决定气候箱控制系统的约束控制对象,针对约束目标,本研究提出渐次目标跟踪算法,将总目标分为若干子目标,对于任意一个子目标,根据子目标值与当前值的差值进行变参数控制,在对任意一段的控制中,选用最佳控制参数,使气候箱内在快速达到检测条件的同时不出现雾和结露现象。
2.1 渐次目标跟踪算法建模
渐次目标跟踪算法将控制目标分为若干段,对每一段实施控制。
定义1: 令ξ为大于零的正数,对于总控制目标fC_set(∞)有,fC_set(∞)±ξ为总控制目标的上一个渐次目标,其中带宽值ξ在试验中获取。
将控制目标分为m个子目标,即控制目标为:
fC_set(t)={fC_set(t0),fC_set(t1),fC_set(t2),…,
fC_set(tm-1),fC_set(∞)±ξ,fC_set(∞)}。
式中:fC_set(t0)为控制对象的初始状态;fC_set(∞)为目标最终的控制设定值。
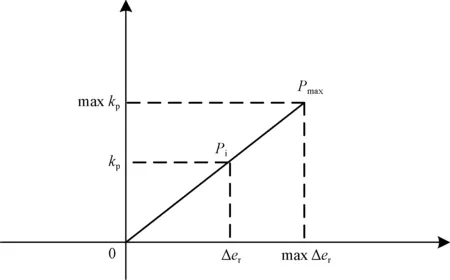
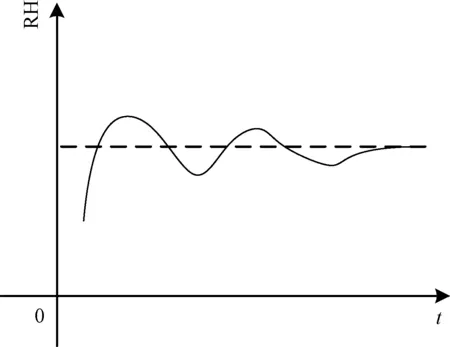
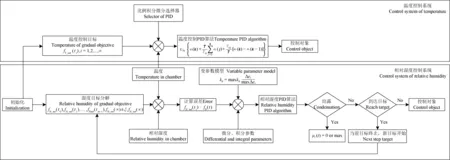
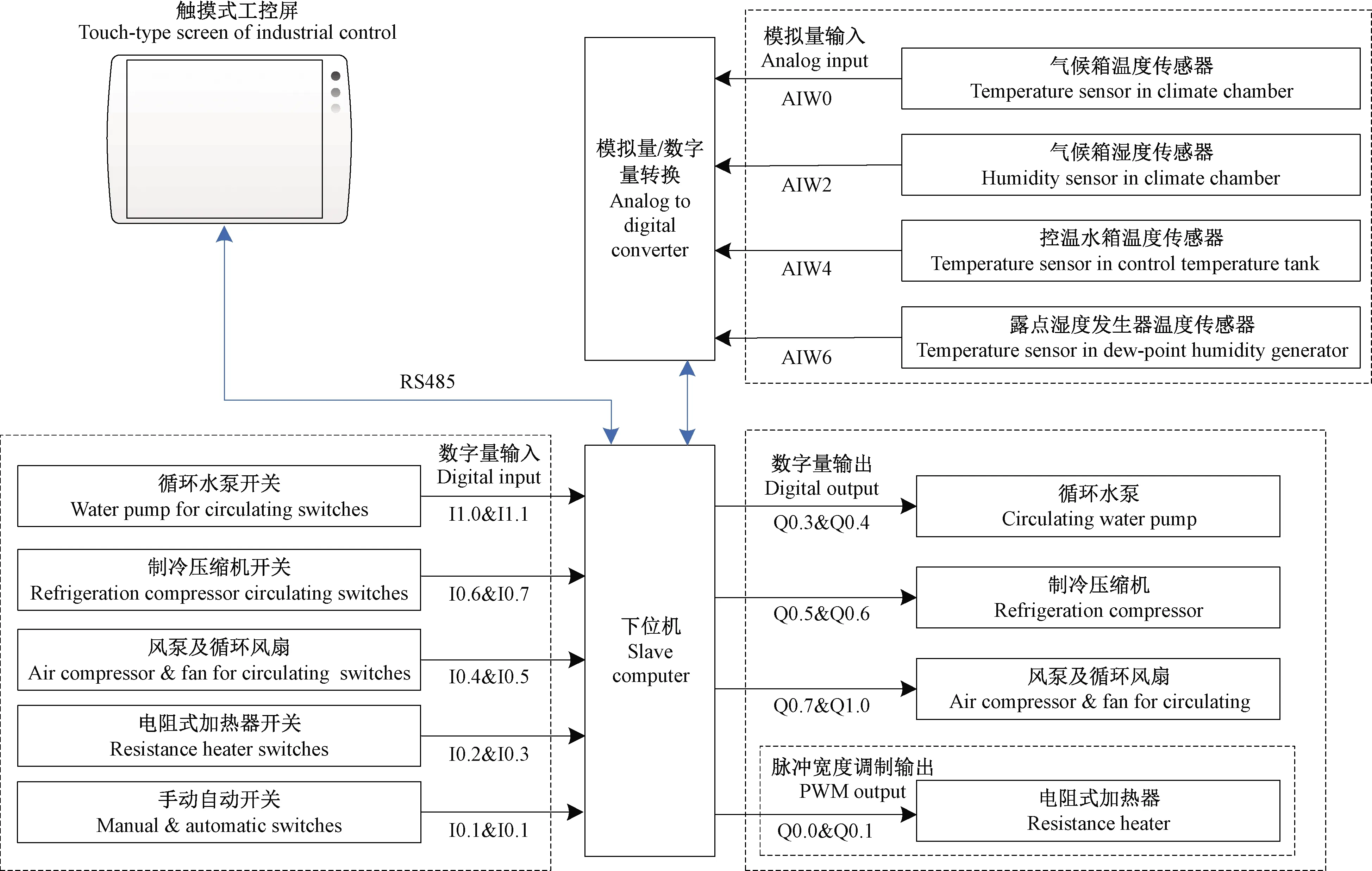
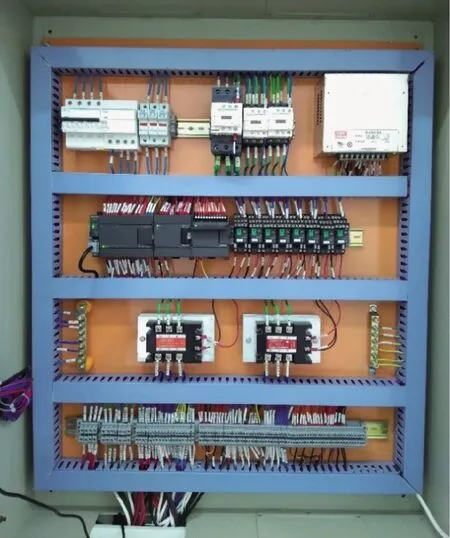
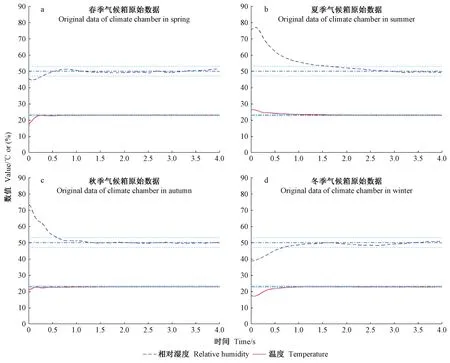
当fC_set(t0)>fC_set(∞)时,取fC_set(∞)+ξ; 当fC_set(t0) 定义2: 令对于给定的大于零的小数ε,当气候箱实时值fC(t)与跟踪目标值fC_set(ti)的差值|fC(t)-fC_set(ti)|≤ε时,则第i次渐次目标跟踪控制完成,控制子目标fC_set(ti)变为下一段控制子目标fC_set(ti+1)(1≤i≤m)。 定理: 设t时刻气候箱的温度为fT(t),气候箱的相对湿度为fH(t),露点温度为fDew(t)。则此时刻的露点温度为: fDew(t)=-27.77+0.475fH(t)+0.819 2fT(t)- 0.002 047fH2(t)+0.001 944fH(t)fT(t)- 0.000 077 87fT2(t)。 (1) 式中:t≥0,10≤fT(t)≤38,30≤fH(t)≤95。 定理证明: 依据焓湿图(h-d),可以在标准大气压下,根据空气温度和相对湿度的确定得出此刻引起空气中水蒸气析出的露点温度。 在焓湿图中找到T=23 ℃等温线与H=50%等相对湿度线的交叉点,由交叉点沿等d线向下与H=100%相对湿度线作交点,则交点对应的温度12.0 ℃为露点温度。本研究提出的检测环境温度范围为10~38 ℃,可满足要求。因此可从热工手册中查到相应环境温度和相对湿度对应的露点温度。 将得到的数据采用多项式回归法变换为连续多项式函数(Fitzmauriceetal., 2016)。 设fT(t)为气候箱的温度,fH(t)为气候箱的相对湿度,fDew(fT(t),fH(t))为该温湿度条件下拟合的结露温度函数。 令fDew(fT(t),fH(t))为二次多项式: fDew(fT(t),fH(t))=p0+p1fH(t)+p2fT(t)+ p3fH2(t)+p4fH(t)fT(t)+p5fT2(t)。 (2) 式中:pk为各项系数,0≤k≤5。 根据得到的数据,可得第i行温度第j列相对湿度的一组[fH(t)i,j,fT(t)i,j]对应的露点fDew(t)i,j,其中1≤i≤28,1≤j≤14。令N=28,M=14,则拟合曲面fDew(fT(t),fH(t))与露点温度数据fDew(t)i,j偏差的平方和L(p)为: p4fH(t)i,jfT(t)i,j+p5fT2(t)i,j-fDew(t)i,j)]2。 (3) 为了使拟合的曲面无限接近拟合点,令偏差的平方和L(p)取最小(Yuanetal., 2018; Madencietal., 2019),即 ∂L(p)/∂pk=0,有: 求解式(4)得到:p0=-27.77,p1=0.475,p2=0.819 2,p3=-2.047×10-3,p4=1.944×10-3,p5=-7.787×10-5。 证毕。 大气候箱湿度控制渐次跟踪模型构建如下: 令大气候箱初始时刻t0时相对湿度为H0,记为fH(t0)=H0,目标湿度为fH_set(ti); 令渐次跟踪目标的步长为K(K∈N); 限幅带宽为ξ(ξ>0)。则fH(t0)-fH_set(∞)-ξ=L,即将总目标分为m+1个小段,其中m为整数。将L/K=m+Δk中的Δk合并到限幅带宽ξ中,即限幅总带宽为ξ+Δk。渐次目标跟踪控制器设计步骤如下。 Step 1: 首次跟踪目标时,令第1次设定值为fH_set(t1),则第1次设定值与实际测量值的差值为: fH_set(t1)-fH(t)=er(t)。 (5) 将误差er(t)代入PID(Shahnietal., 2019),得: (6) 式中:ur(t)为控制器输出;er(t)为反馈信号与渐次目标设定值误差;Kp为比例系数;Ki为积分系数;kd为微分系数。 若此刻气候箱的温度为fT(t),气候箱的相对湿度为fH(t),可得此时对应的露点温度fDew(t),若露点湿度发生器水箱温度为TH(t),则当TH(t)>fDew(t)时,气候箱内不会出现结露现象,控制器输出ur(t)继续输出; 反之,若fH(t)>fH_set(∞),控制器满负荷输出,若fH(t1) 当气候箱实时值fH(t)满足定义2时,则控制目标达到,进入下一跟踪目标控制; 如果没有达到,则继续实施跟踪控制。 … Stepm: 第m次跟踪目标时,令第m次设定值fH_set(tm),则第m次设定值与实际测量值的差值为: fH_set(tm)-fH(t)=er(t)。 将第m次跟踪目标误差er(t)代入式(6)进行控制,得输出ur(t)。判断此时是否引起结露,当满足TH(t)>fDew(t)时,控制器继续输出; 反之,满负荷输出或输出复位为0。当气候箱实时值fH(t)满足定义2时,控制目标达到,进入下一目标; 否则继续跟踪控制。 Stepm+1: 当跟踪目标到达限幅带宽ξ+Δk内时,此时的跟踪目标为: fH_set(tm+1)=fH_set(∞)。 在带宽±ξ+Δk内的控制采用PID算法,则跟踪控制输出为: (7) 式中:er(t)=fH_set(∞)-fH(t); 比例系数KHp、积分系数KHi和微分系数KHd为最终控制参数。 从而经过m+1次后达到最终设定目标值fH_set(∞)。将式(7)写为离散函数,即: 式中:er(k)为第k次误差;THi为积分时间;THd为微分时间;T为采样时间。 大气候箱内湿热交换过程复杂,大滞后现象明显,一个固定PID参数的控制器在分段控制中会使系统的性能变差(Shahetal., 2016; Xiangetal., 2019),甚至产生震荡。因此,对于设计的渐次目标逼近控制系统,每一段控制可以根据不结露的约束选择最优的比例系数kp、积分系数Ki和微分系数kd,使大气候箱内在确保不出现雾和露的前提下温湿度快速达到检测条件。 在PID控制器中,比例系数kp起增益调节作用,积分系数Ki起稳态误差调节作用,微分系数kd起克服较大惯性或滞后的作用。依据子目标值与最终设定目标的差值,当差值大时比例系数kp和积分系数Ki可以适当增加,以缩短系统达到子目标值的时间; 当差值缩小,即趋于最终目标设定值时,减小比例系数kp和积分系数Ki,可保障系统在逼近下一个目标时不产生过度震荡,达到高精度控制。 令初始值与目标值误差达到最大值maxΔer时对应的比例因子为maxkp, 令误差值为0时对应的比例因子为0。如图3所示,连接Pmax与Pi两点,使得比例因子kp在Pmax与Pi两点之间的直线上滑动,当误差Δer增大或减小时,比例系数kp相应增大或减小。 图3 参数kp选取规则Fig.3 Rule of variable parameter kpcontrol 图3中,横轴表示误差值Δer,纵轴表示比例系数kp。对于任意误差Δer∈[0,maxΔer],由三角形相似比例得: (8) 整理得: (9) 式中:kp为此刻选择的比例参数; maxkp为满负荷输出的比例系数; Δer为实际值与目标值的误差; maxΔer为初始值与最终设定值的最大误差。 式(9)为任意渐次目标跟踪控制比例项系数的选择模型。 积分项是补充非线性系统控制中比例项增益的不足,但积分项会使控制曲线出现震荡(图4)。 图4 气候箱控制震荡曲线Fig.4 Oscillation curve of climate chamber 图4中,由于湿度的初始点在设定目标值下方,因此控制系统一直实施增量控制。当控制曲线达到设定目标值时,虽然控制输出ur(t)=Kper(t)为零,但积分项不为零,控制曲线仍会上升直至积分项累积和为零时曲线才会下降,由此导致的气候箱内出现雾和结露现象作为检测仪器是应该避免的。当湿度的初始点在设定目标值上方时,也会产生同样的问题。 本研究提出的渐次目标跟踪控制模型,首先找到复杂非线性系统的稳定点,进而找到稳定点的比例系数kp、积分系数Ki和微分系数kd。对于前m段中任意子目标值比例系数kp,根据前述的动态方法选取。积分项系数、微分项系数选取系统达到稳定点时的积分系数Ki、微分系数kd。第m+1段的控制则直接选用系统达到稳定点时的比例系数kp、积分系数Ki和微分系数kd。系数选取采用齐格勒-尼科尔斯法则(Ziegleretal., 1942),首先,采用试凑法找到使系统产生周期震荡的kp,当系统产生等幅周期震荡时,记录此时的比例系数kp; 然后,选取积分时间Ti为2倍的等幅周期震荡时间; 最后,选取微分时间Td系数为0.125倍的等幅周期震荡时间,同时比例系数kp减小为0.6kp。经过以上选取方法,得到复杂非线性系统稳定点的比例系数kp、积分系数ki和微分系数kd。 甲醛/VOCs检测用气候箱包括箱体、控温系统、控湿系统和控制系统,其中,控温系统由控温水箱、加热装置、制冷压缩机及制冷盘管、表面式冷却器和循环水泵构成,控湿系统由露点湿度发生器、加热装置、制冷压缩机及制冷盘管、风泵和转子流量计构成,如图5所示。 大气候箱工作时,系统首先检测大气候箱内的温度和相对湿度。控温水箱内的制冷和加热器开始运行,将控温水箱内的水通过无油磁力泵传送到气候箱内的表面式冷却器中,并回水至控温水箱,表面式冷却器向箱体内释放或吸收热量。释放或吸收的热量通过循环风扇使气候箱内的温度保持均匀,直至达到设定温度。同时,露点湿度发生器内的制冷和制热设备开始运行,将调制好的介质水通过无油磁力泵输送到顶端的喷淋装置中,使水流向下喷淋。置于外部的风泵将室外空气泵入空气净化装置中,净化后的空气输送到露点湿度发生器底部的出气口,使空气保持向上运动。由于在瓷环层中喷淋装置喷出的水流被打散,向上运动的空气与调制好的介质水充分接触,因此空气呈露点饱和状态。露点饱和状态的空气经过转子流量计后被输送到气候箱的喷射装置中,经室内风扇吹扫混合,使气候箱内的温湿度均匀。 大气候箱控制系统由温度控制和相对湿度控制2部分构成,设定大气候箱内温度值和相对湿度值并启动后,系统实时监测气候箱内的温度和相对湿度。通过控制算法调节控温水箱的温度,使大气候箱内的温度达到设定值; 通过控制算法控制露点湿度发生器的温度,进而控制大气候箱内相对湿度。温控系统和湿控系统单独运行,以简化系统的复杂性。控制算法程序流程如图6所示。 图5 气候箱结构Fig.5 Schematic of climatic chamber 图6 控制算法程序流程Fig.6 The flow chart of control algorithm program 温度控制系统在系统初始化后,读取箱内温度控制目标、箱内温度值和PID控制算法比例以及微分和积分参数。目标值与测量值作差后代入PID控制模块,计算输出0~24 V的脉冲电压,并传送给固态继电器的控制输入端。固态继电器接到PID输出的电压值后输出相应的0~220 V交流电压,从而控制控温水箱的电加热器功率。调整好的控温水箱内的介质水通过循环系统送至箱内表面式冷却器,达到控制箱内温度的目的。 对于控湿系统,当控制程序算法启动后进行初始化,读取相对湿度控制目标、箱内湿度值和相对湿度。将相对湿度控制目标分解为m+1个子目标,用实时值和目标值作差。顺次选取分段后的子目标作为当前控制目标,通过变参数模型选取PID的比例、微分和积分系数,进行PID控制计算,PID的输出影响通过结露预测器进行判别。如果结露,输出赋值为零或满负荷输出。如果不结露,程序判定是否达到子目标: 如果子目标未达到,则继续对箱内相对湿度进行调整; 如果子目标达到,则程序开启下一个子目标控制。重复上述过程,直到相对湿度达到总设定目标。 控制系统的实现采用工控触摸屏作为上位机、可编程逻辑控制器作为下位机的结构。上位机采用MCGS组态软件编写人机交互界面,实现下达操作指令、实时监控系统工作状态、定时记录运行数据的功能,下位机采用西门子系列的可编程逻辑控制器(PLC)编写温度和湿度控制系统,上下位机通过RS485通讯。上位机、下位机设计示意如图7所示。其中,控温水箱的制冷压缩机功率为1.5匹,电阻式加热器功率为4 kW。露点湿度发生器的制冷压缩机功率为2匹,电阻式加热器功率为6 kW。风泵最大能够提供60 m3·h-1的风量。循环水泵的流量为50 L·h-1。控湿系统和控温系统中,PLC的2个控制端口Q0.0和Q0.1分别控制控温固态继电器和控湿固态继电器,通过2个固态继电器分别控制控温水箱和露点湿度发生器中的加热器。控制器选用西门子S7系列,模拟量采集模块选用EM231。使用变量类型有数字量输入、数字量输出和模拟量输入3类,其中,数字量输入使用手动模式、自动模式、循环风机、露点气泵、控温循环水泵、控温冷冻机、控温水箱加热、露点水箱加热、露点水泵和露点冷冻机开关量输入10个变量分别监测,输入点分别为I0.0、I0.1、I0.2、I0.3、I0.4、I0.5、I0.6、I0.7、I1.0、I1.1; 数字量输出分别控制露点水箱加热器、控温水箱加热、循环风机、露点水泵、露点气泵、露点冷冻机、控温冷冻机和控温循环水泵8个输出点,对应控制器的输出点为Q0.0~Q0.7; 模拟量输入使用EM231的4个输入点,分别采集箱内相对湿度、箱内温度、露点湿度发生器温度和控温水箱温度。硬件电路实现如图8所示。 图7 上位机下位机设计示意Fig.7 Design diagram of slave computer and principal computer 图8 系统硬件电路Fig.8 System hardware circuit diagram 应用本研究提出的控制方法进行人造板家具甲醛释放量检测,整个过程中未出现雾和结露现象,控制精度满足国际标准化组织标准ISO 16000-9要求。在不同季节环境条件下进行控制能力测试,实测数据如图9a、b、c、d所示。 图9 过渡过程曲线Fig.9 Curve of transient process 图9中,点画线为设定值,即温度为23 ℃,相对湿度为50%; 点-点线为精度范围,温度±0.1 ℃,相对湿度±3%。图9a中,相对湿度第1次达到系统设定值的时间为5 523 s,超调量为1.2%; 温度第1次达到系统设定值的时间为7 385 s,超调量为0 ℃; 达到稳态的时间为3.3 h。图9b中,相对湿度第1次达到系统设定值的时间为28 070 s,超调量为0.7%; 温度第1次达到系统设定值的时间为18 900 s,超调量为0.1 ℃; 达到稳态的时间为7.8 h。图9c中,相对湿度第1次达到系统设定值的时间为12 760 s,超调量为0.2%; 温度第1次达到系统设定值的时间为9 676 s,超调量为0 ℃; 达到稳态的时间为3.8 h。图9d中,相对湿度第1次达到系统设定值的时间为15 760 s,超调量为0.2%; 温度第1次达到系统设定值的时间为10 490 s,超调量为0 ℃; 达到稳态的时间为4.4 h。 从试验结果可以看出,气候箱内相对湿度初始值无论在控制目标下方还是在控制目标上方,都能非常平滑地渐近跟踪到控制目标设定值范围内,其中相对湿度误差范围±3%,温度误差范围±0.1 ℃,达到检测条件的时间为6~8 h。 图9a为春季试验数据,气候箱内起始温度和相对湿度低于设定值,置于露天场地的制冷等设备工作环境温度适宜,能够较快达到设定目标。图9b为夏季试验数据,气候箱内初始条件处于高温高湿状态,设备工作环境温度较高,制冷效力受环境温度限制,气候箱需要20 000 s左右才能进入精度范围,28 080 s即8 h(28 800 s)内能够达到设定目标。图9c为秋季试验数据,气候箱内起始温度低于设定值,相对湿度由于降雨影响高于设定值,但此时设备工作环境温度适宜,气候箱内温湿度能够较快达到设定条件。图9d为冬季试验数据,气候箱内起始条件为低温低湿,由于环境温度较低,加热器相比其他季节需要做更多的功来克服能量的损耗和介质水的预热,因此气候箱内温度达到设定值的时间慢于春季和秋季。 分析试验结果可得,季节性的环境条件对气候箱达到稳态的时间具有较大影响: 一是环境温度变化导致气候箱内的初始条件不同; 二是环境温度影响设备工作状态。春季和秋季环境适宜,气候箱能够在一个较好的前提下快速达到检测甲醛/VOCs的温湿度条件。夏季和冬季因极端的高温高湿和低温低湿环境,导致气候箱达到检测条件的时间大于其他季节。在系统设计最大功率为14 kW时,气候箱达到稳态的时间不超过8 h。 同时,由于30 m3气候箱是一个大容积场所,系统存在大滞后现象(Lietal., 2017),当试验中露点湿度发生器需要补水时,介质水温度变化将导致系统产生扰动,系统需要较长的调整时间。为此,本研究对于气候箱补水时产生的扰动采用前馈PID控制方法进行补偿控制(郑焕祺等, 2018),通过对露点湿度发生器中介质水温度的实时跟踪监测,将调制好同等温度的介质水补充到露点湿度发生器中,从而减少系统扰动,提高控制系统稳态运行时的精度,避免时滞现象对控制系统的影响。 本研究设计的渐次目标控制算法能够使30 m3大气候箱: 1) 在达到检测条件过程中,无雾和结露现象出现; 2) 稳态工作精度达到温度23±0.1 ℃,相对湿度50%±3%,满足国际标准化组织标准ISO 16000-9要求; 3) 达到稳态工作的时间不超过8 h。
2.2 变参数控制
3 试验设计与控制算法实现
3.1 气候箱控制系统设计
3.2 控制算法设计与实现

4 结果与分析
4.1 试验结果
4.2 结果分析
5 结论
猜你喜欢
文萃报·周二版(2023年50期)2024-01-07 00:55:02湖北农机化(2021年7期)2021-12-07 17:18:46中国测试(2021年4期)2021-07-16 07:49:18山东冶金(2019年2期)2019-05-11 09:12:18家庭科学·新健康(2018年10期)2018-12-15 11:26:16新闻传播(2015年10期)2015-07-18 11:05:40自动化仪表(2015年5期)2015-06-15 19:01:34汽车维修与保养(2015年6期)2015-04-17 03:31:40质量技术监督研究(2015年1期)2015-04-09 06:42:12机械制造文摘(焊接分册)(2013年6期)2013-03-20 13:57:29
