
基于实际道路工况的混合动力客车能量管理策略多目标优化*
2020-02-21 08:22高建平孙家辉郗建国任德轩
汽车技术 2020年2期
高建平 孙家辉 郗建国 任德轩
(河南科技大学,洛阳 471003)
主题词:混合动力客车 行驶工况 多目标粒子群优化 半实物仿真验证
1 前言
混合动力电动客车(Hybrid Electric Bus,HEB)含有发动机和电机两种动力源,能量管理策略是分配并调节各动力源功率输出的关键技术,直接影响整车的动力性、经济性和排放性。能量管理策略的多目标优化可在不牺牲动力性的前提下,提高整车的燃油经济性,降低污染物排放量,并有效延长电池的使用寿命。近年来,国内外学者提出了很多针对控制策略的多目标优化方法,主要分为两类,一类是通过加权油耗、排放等将多目标归一化为单目标的优化法[1-3],另一类是同时对各目标并行优化的多目标优化方法[4-7]。然而,前者的优化结果难以客观反映各子目标的真实情况,且每次优化只能获得1组最优解。目前,针对控制策略的多目标并行优化大多是基于标准典型循环工况的,与车辆实际道路行驶工况存在较大差异,导致车辆在实际路况行驶中的燃油经济性、排放性能不能达到最佳状态。
基于上述分析,本文以行驶线路固定的混合动力城市公交车为研究对象,在MATLAB中编写相应程序对采集到的有效行驶数据进行运动学片段划分、主成分分析、模糊C-均值聚类,从而构建出符合该公交线路特征的实际典型循环工况。同时以整车的燃油经济性和污染物排放量作为优化目标,基于构建的典型循环工况对控制策略进行多目标并行优化,最后通过半实物仿真试验验证优化后控制策略的可行性。
2 车辆典型行驶工况构建及验证
2.1 车辆行驶数据采集及主成分分析
综合考虑该城市道路的实际特点和公交车的工作特征及运行区域类型等因素,最终选择如图1所示的公交车固定行驶线路,将车载终端数据采集设备安装到混合动力公交车上,以自主行驶法进行了为期3个月的数据采集。

图1 公交车固定行驶线路
为便于数据处理,定义运动学片段为车辆从一个怠速状态开始到下一个怠速状态开始之间的运动过程[8]。对采集的有效行驶数据进行运动学片段划分,共得到9 643条运动学片段。为了充分表达各运动学片段的特征,本文选取运行距离L、平均速度vm、最大速度vmax、运行时间t、怠速时间ti、加速时间ta、减速时间td、匀速时间tc、最大加速度amax、最小加速度amin、加速段平均加速度aa、减速段平均加速度ad等12个具有代表性的特征参数,构建出了短行程特征参数矩阵M9643×12,其中的元素如表1所示。在选取的12个特征参数中,有些变量间存在关联,并不相互独立。为消除选取参数之间的冗余性,减少特征参数数量,提高后期聚类准确度,对M9643×12进行主成分分析,得到其特征值的贡献率和累积贡献率如表2所示。从表2可以看出,前4个主成分的累积贡献率为84.97%,已超过80%,能够较好地反映原有信息。在进行主成分分析的同时也得到了主成分得分矩阵S9643×4,其元素如表3所示。
2.2 模糊C-均值聚类算法
模糊C-均值算法由普通C-均值算法改进形成,是一种柔性的模糊划分,能准确地反映出实际样本的分布情况[9],因此本文选择模糊C-均值聚类对得分矩阵S9643×4进行聚类。模糊C-均值聚类算法是一种基于目标函数的聚类算法,需要求取样本点到各聚类中心的距离,以及样本点的隶属度,具体步骤为:

表1 特征参数矩阵M9643×12元素
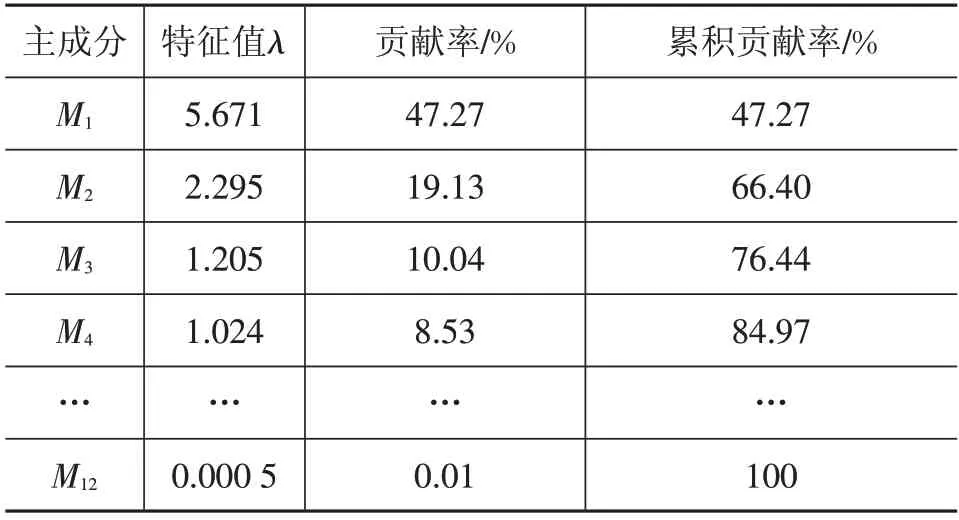
表2 各主成分的贡献率和累积贡献率

表3 各主成分得分矩阵S9643×4元素
a.确定类别个数V,初始化隶属度矩阵,选取模糊加权参数m,迭代停止误差Error以及最大迭代步数Mis。
b.初始化聚类中心C,计算初始的距离矩阵。
c.更新聚类中心和隶属度:

式中,Cj为第j类聚类中心;Xi为第i个样本;uij为样本Xi隶属于第j类的隶属度;dij(j=1,2,…,V)、dik(k=1,2,…,V)分别为样本Xi到第j类、第k类中心的距离。
d.更新距离矩阵,并计算目标函数值J:

e.若达到最大迭代次数Mis或者连续2次目标函数差值的绝对值小于Error则停止,否则转到步骤c。
采用模糊C-均值聚类将前4个主成分的得分矩阵聚成3类,分别为Ⅰ类低速工况(平均速度相对较低,怠速比例较高)、Ⅱ类中速工况(平均速度适中,怠速比例适中)、Ⅲ类高速工况(平均速度较高,怠速比例小)。
2.3 行驶工况合成
通常,构建的典型城市循环工况时长约为1 200 s,可利用各类总运行时间在总体数据中所占的时间比来确定各类运动学片段在最终拟合工况中所占的时间[10],然后从每类中选取与此类综合特征值相关系数最大的代表性运动学片段,来构建车辆行驶工况。将各类综合特征参数值及运动学片段的特征参数值视为变量G、P的分布,二者的相关系数δ为:
式中,Cov(G,P)为G、P的协方差;Var(G)、Var(P)分别Var()U Var(P)为G、P的方差。
δ越大,说明该运动片段与该类越相关,越具有代表性。
完成上述计算后,从Ⅰ类中取5条低速片段,从Ⅱ类中取9条中速片段,从Ⅲ类中取1条高速片段,构建出了持续时间为1270 s、最高车速为46.8 km/h的行驶工况DC_S122,如图2所示。
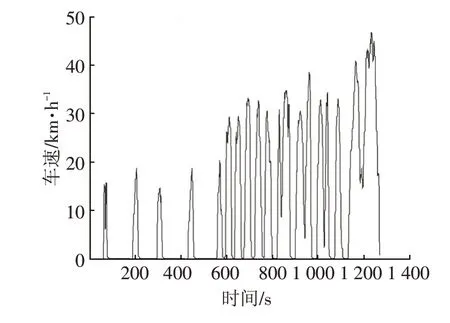
图2 DC_S122典型行驶工况
2.4 车辆典型行驶工况验证
选取某公司开发的混合动力公交车进行工况验证,该车辆的动力系统结构如图3所示,关键部件参数如表4所示。该动力系统各工作模式间相互切换的逻辑条件如图4所示,其中,Treq为整车需求转矩,Te-off为发动机转矩下限,Te-max为发动机转矩上限,SOC、SOClow分别为电池荷电状态及其下限。
为验证DC_S122典型工况的合理性,随机选取该路线上某日公交车的实际行驶数据,并选择基于中国典型城市公交工况优化后的控制策略,与基于DC_S122工况的控制策略进行对比。通过Interface接口将在AVL_Cruise中建立的整车动力学模型集成于MATLAB/Simulink中,将上述工况加载到整车模型中进行Cruise与Simulink的联合仿真,燃油消耗量和CO、NOx和HC排放量的仿真结果如表5所示。
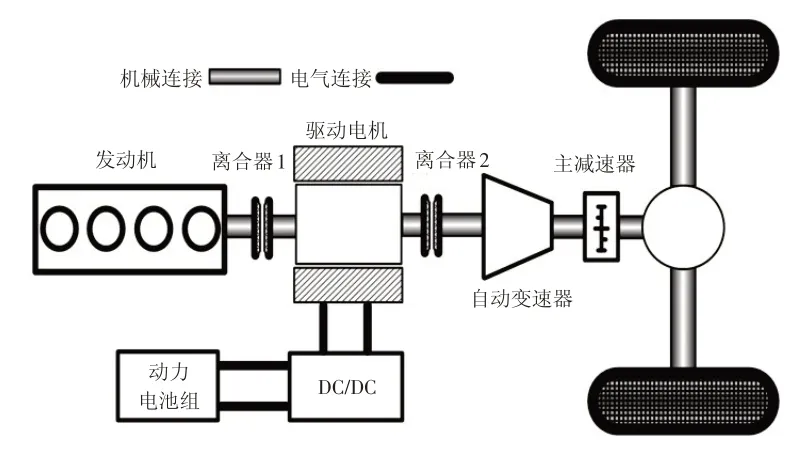
图3 某并联式混合动力城市客车整车动力系统结构
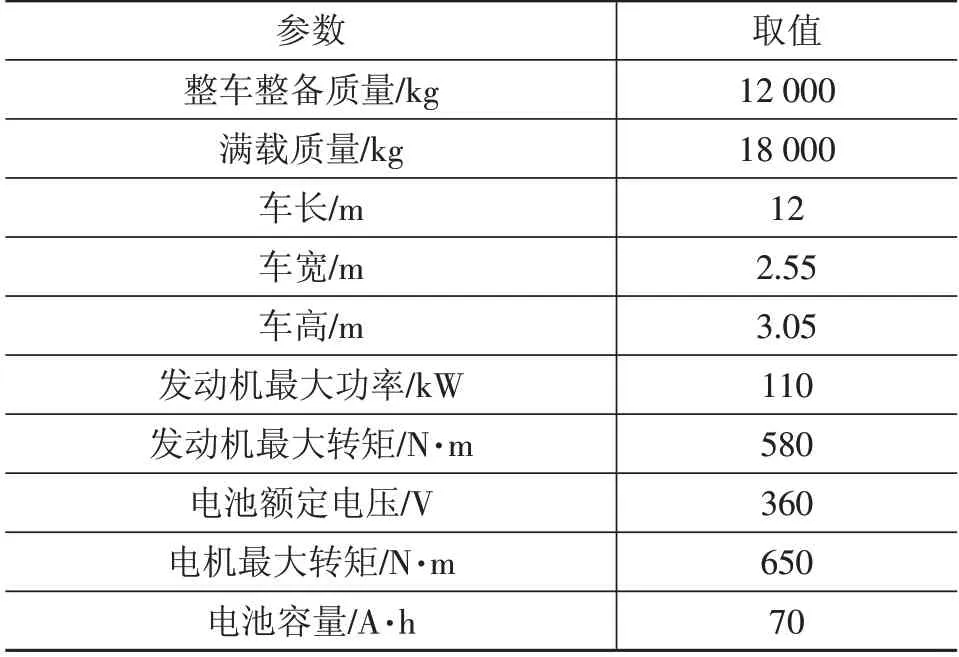
表4 整车部分关键部件参数
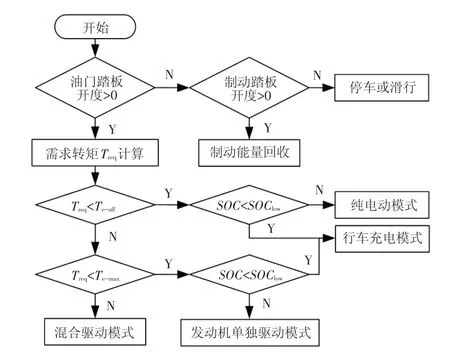
图4 HEB模式切换逻辑框图
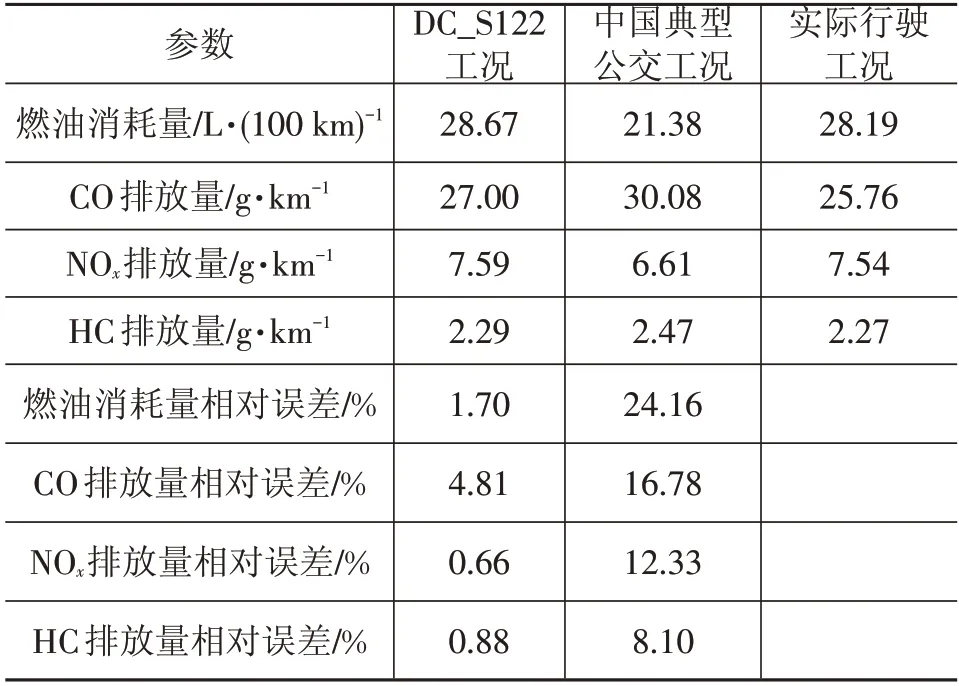
表5 仿真结果对比
由表5可知,中国典型城市公交工况下的燃油消耗量、污染物排放量与实际工况相比差异显著,而DC_S122行驶工况下的燃油消耗量和污染物排放量与实际工况结果相比误差较小,能够代表该路线公交车的真实行驶状况。
3 基于Pareto解集的多目标优化设计
3.1 优化参数及约束条件选择
HEB的优化涉及很多参数,本文在车辆各部件参数已经确定的条件下,以对整车动力性、燃油经济性及排放性能影响较大的控制参数为变量进行优化,优化变量如表6所示。约束条件为:0~18 km/h加速时间≤3 s;0~50 km/h加速时间≤20 s;15 km/h最大爬坡度≥12%;实际车速与期望车速误差的绝对值≤3 km/h。
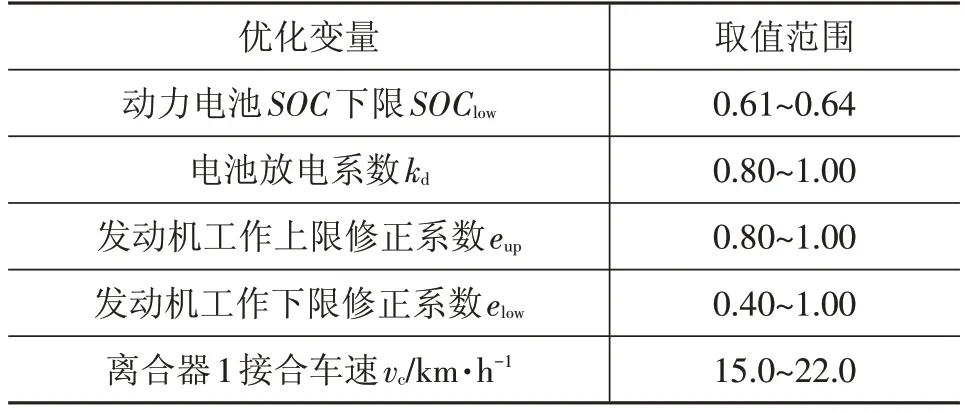
表6 优化变量及其取值范围
3.2 多目标优化数学模型
HEB控制策略的优化是典型的多目标数学问题,求解的目的是使相互冲突的多个目标函数,在可行域内得到最优解集,用Pareto原理表示,称为Pareto解集。通常,多目标数学模型可表述为:
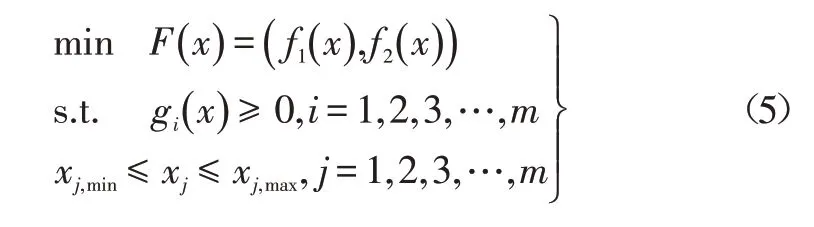
式中,F(x)为多目标函数;f1(x)、f2(x)为互相冲突的子目标函数;g(x)为约束条件;i为约束条件个数;j为设计变量个数;xj、xj,min、xj,max分别设计变量及其下限和上限。
依据多目标数学模型,建立以发动机燃油消耗量与污染物排放量为多目标优化的数学模型,定义Qfuel为车辆的燃油消耗量,则车辆燃油消耗量函数f1(x)的数学模型为:

定义CO、NOx、HC的排放量分别为QCO(x)、QNOx(x)、QHC(x),由于CO的排放量约为NOx、HC两种污染物排放量的10倍,因此污染物排放量的综合评价指标f2(x)的数学模型为:

3.3 多目标粒子群优化算法
粒子群优化(Particle Swarm Optimization,PSO)算法与其他优化算法相比,具有规则简单、容易实现、精度高、收敛快等优点,因此本文选取PSO对控制参数进行优化。PSO算法通过社会认知和自我认知,进行个体速度和位置的更新,并逐代搜索寻优,最终获得全局最优解。速度和位置更新公式分别为:
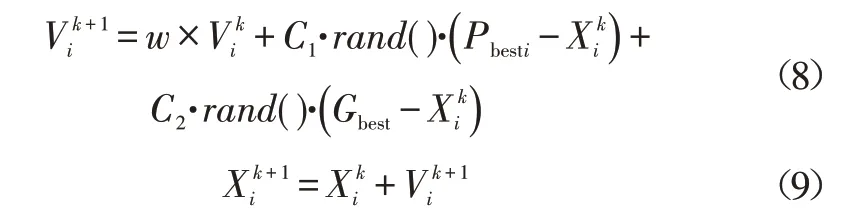
多目标粒子群优化方法与求解单目标的优化算法相比,引入了精英集策略,即选取非劣解“粒子”构成Pareto精英集(每次迭代过程中的非劣解集合)。利用多目标粒子群优化算法对控制参数优化的具体流程如图5所示。
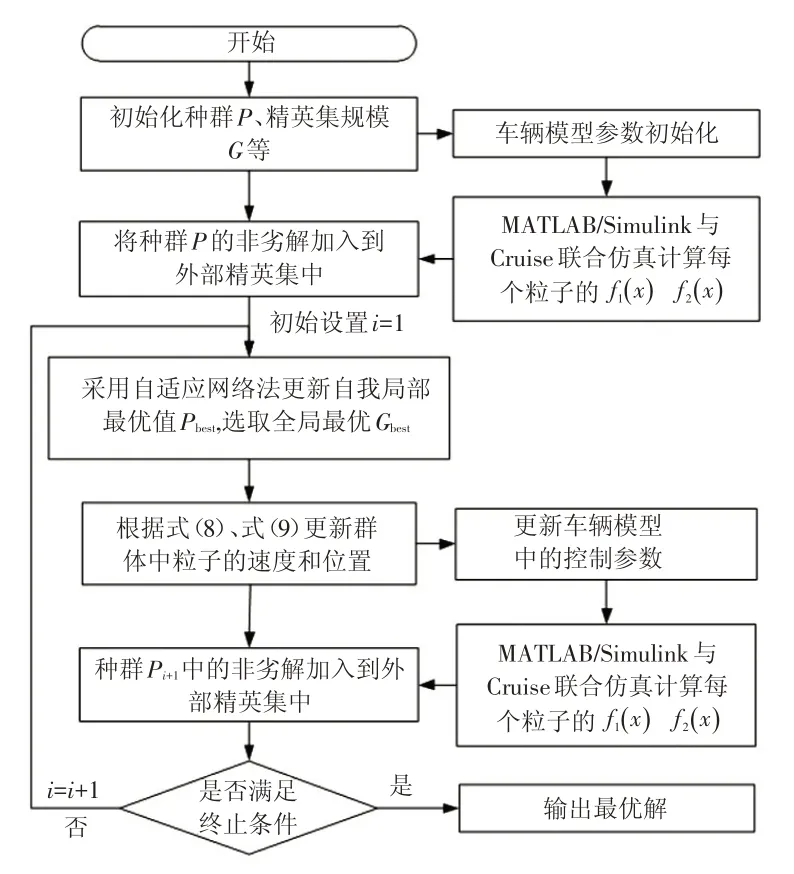
图5 多目标粒子群优化算法流程
4 优化仿真结果分析及半实物仿真验证
4.1 优化结果分析
在DC_S122工况下进行粒子群多目标离线优化,仿真得到100 km燃油消耗量和综合排放量,仿真结果的Pareto解集及其收敛曲线如图6所示。将得到的Pareto解集与优化前的结果进行比较,得到9组最优支配解集,如表7所示,其中最后一组为控制策略优化前的燃油消耗量、污染物排放量综合评价指标,以该组数据作为基准。
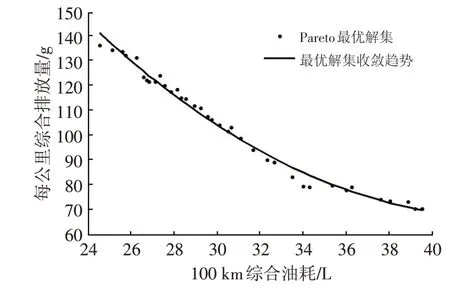
图6 Pareto解集及最优收敛曲线
与优化前相比,9组Pareto最优支配解集下的目标值均得到了优化,其中燃油消耗量最多下降了6.8%,污染物排放量综合指标平均降低了6.43%。
多目标优化后可得到多组最优解,可以根据关注目标的偏重个性化定制控制策略,本文最终选取燃油经济性最优组(第2组)的控制策略进行半实物仿真验证。
4.2 半实物仿真验证
为使仿真结果更加接近于实际车辆运行情况,对优化前、后的控制策略进行基于驾驶员在环的半实物仿真验证。该仿真平台主要包括dSPACE、CANoe、驾驶员模拟器等硬件和MATLAB、AVL Cruise、ControlDesk等软件[11],仿真平台如图7所示。仿真试验工况是从车辆实际行驶中随机选取的一段时长为28 min的工况,将Cruise整车的电池模型SOC初值设为0.65,仿真试验结果如图8所示。
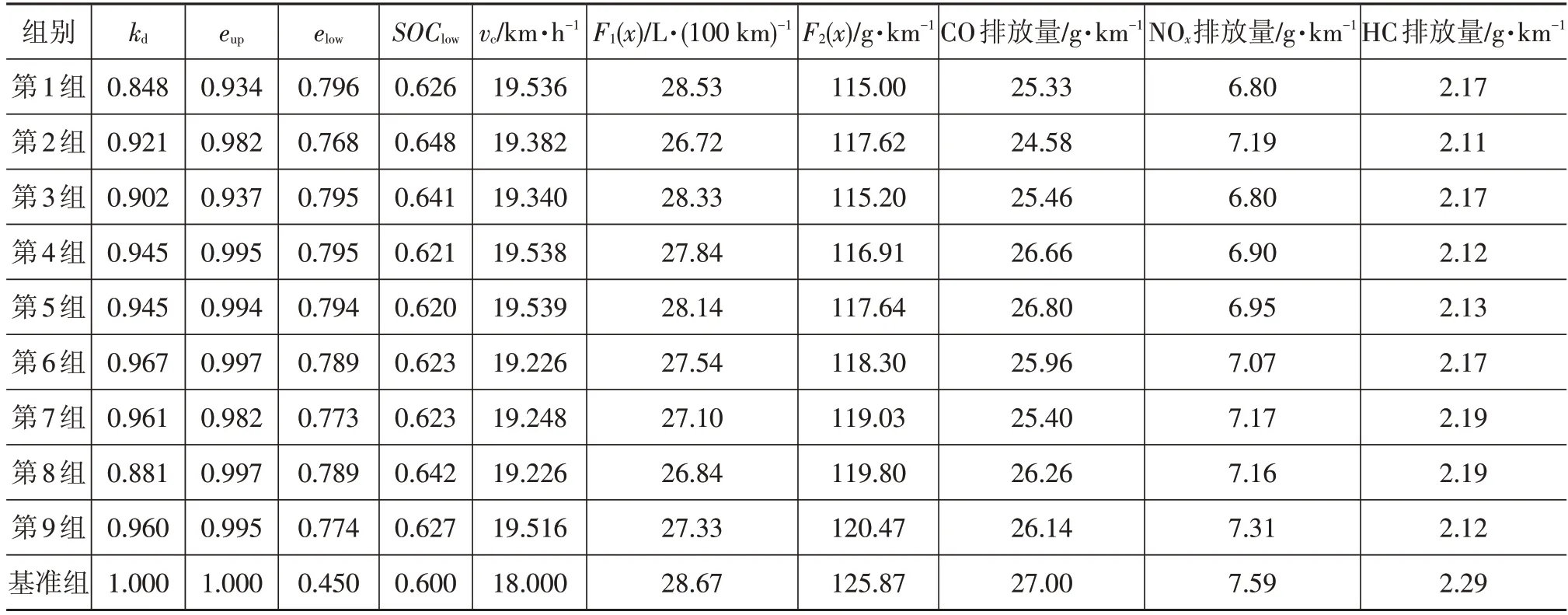
表7 最优支配解集

图7 基于驾驶员在环的半实物仿真平台
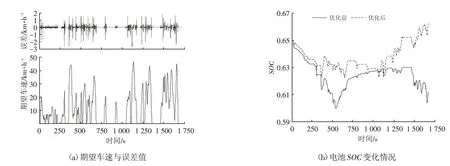
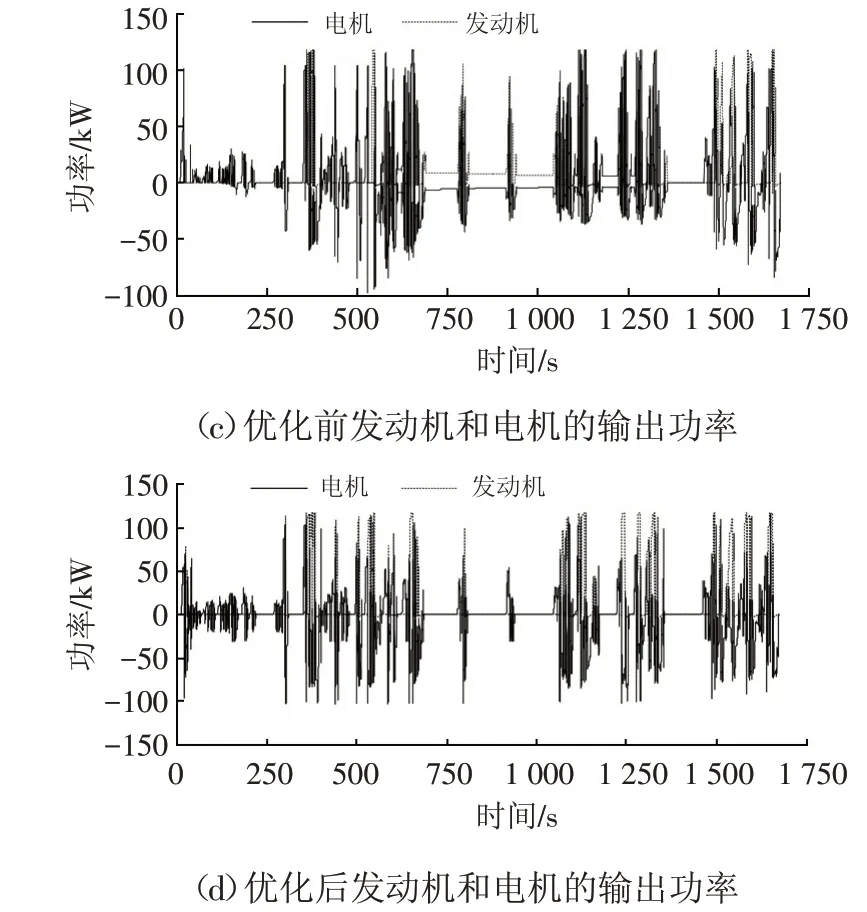
图8 半实物仿真试验结果
从图8a中可以看出,在优化后的能量管理策略下,驾驶员很好地完成了车速跟踪,实际车速与期望车速基本相同,车速跟随误差的最大绝对值控制在3 km/h以内,满足整车动力性需求,验证了控制策略的可靠性。由图8b可知,在优化后的控制策略下动力电池的SOC比优化前的波动更小,满足混合动力汽车对电量均衡的要求,有利于减少电池的损耗。由图8c和图8d可知,控制策略优化后发动机起动参与系统工作的时间、频次比优化前均有所下降,改善了整车的燃油经济性。
优化前、后百公里燃油消耗量分别为28.94 L和26.57 L,污染物排放量综合评价指标分别为127.12 g/km和116.15 g/km。优化后燃油消耗量和污染物排放量综合评价指标分别降低8.19%和8.63%,表明多目标优化后的整车控制策略在保证HEB最佳燃油经济性的基础上,最大程度地降低了污染物的排放量,从而验证了多目标优化后能量管理策略的可行性。
5 结束语
本文运用主成分分析和模糊C-均值聚类相结合的方法拟合出了某公交线路的代表性循环工况DC_S122,与中国典型城市公交工况进行仿真对比,结果表明,DC_S122典型循环工况能够更准确地表征该路线公交车的实际行驶状况。在DC_S122工况下,采用多目标粒子群优化算法优化了对整车能量管理策略有重要影响的关键控制参数,燃油经济性和污染物排放性综合评价指标均明显提高,得到的Pareto解集具有良好的收敛性。选取燃油经济性最优组的控制策略进行半实物仿真试验,从而验证了优化后控制策略的可行性,解决了因控制策略与实际行驶工况不匹配导致混合动力客车在实际行驶中燃油经济性、排放性能无法达到最佳状态的问题。
猜你喜欢
西部交通科技(2022年2期)2022-04-27
看世界·学术上半月(2020年9期)2020-09-10
河北工业大学学报(2019年4期)2019-09-10
新能源汽车报(2019年25期)2019-08-13
新能源汽车报(2018年9期)2018-05-14
中学生数理化·高二版(2016年3期)2016-12-26
中国国情国力(2016年1期)2016-11-26
航运交易公报(2016年9期)2016-03-19
航运交易公报(2015年40期)2015-11-30
航运交易公报(2015年39期)2015-11-26
