
曲轴转角域ADRC在船舶柴油机中的应用
2020-02-08 02:46王润芝李学民袁志国王忠巍李文辉刘羽飞马修真
哈尔滨工程大学学报 2020年1期
王润芝, 李学民, 袁志国, 王忠巍, 李文辉, 刘羽飞, 马修真
(哈尔滨工程大学 动力与能源工程学院,黑龙江 哈尔滨 150001)
柴油机用作船舶主机时,转速控制至关重要,因为船舶舒适性、船舶航行的安全性以及船舶的寿命在很大程度上取决于柴油机转速控制。针对船舶柴油机转速控制,国内外的学者做了广泛的研究,涵盖PID[1]及其改进和复合算法[2],模型预测控制[3-4],以及鲁棒性算法,如滑模控制[5]和H∞控制[6]等。由于其中的大多数新算法很难工程应用,目前在船舶柴油机的实际应用中PID控制还依然占很大比重。针对船舶柴油机的强非线性和复杂时变性特征, PID参数在全工况条件下都需要进行复杂的标定和优化,这是船用柴油机PID控制在实用中需要面对的难题。
近20年来,自抗扰控制(active disturbance rejection control,ADRC)已经被广泛地研究和应用。ADRC通过将系统的内部动态和外部扰动集中起来作为一个扩张的状态变量,通过扩张观测器对其进行估计和补偿[7-8]。ADRC作为一种不依赖系统模型的算法,具有取代PID的潜质[9]。目前,ADRC在船舶柴油机转速控制中也取得了一定的成果[10-13]。然而,这些ADRC控制器均只在简单的平均值发动机模型或者传递函数模型上进行了验证,忽略了发动机固有的循环转速波动和各缸的不均匀性。但恰是这些特点对ESO的估计性能具有很大的影响。同时,针对ADRC的大多数研究集中在等距采样和控制的情况下对其进行理论分析和实际应用。而对于一些特定的系统,采用基于事件的控制方式会更合理。因为基于事件触发的采样和控制可以更好地利用系统的状态信息[14-16],然而很少研究基于事件的ADRC[17]。内燃机就是典型的事件触发系统,缸内工作过程4个阶段(进气、压缩、膨胀、排气)的划分是基于曲轴转角的[18-19],且内燃机的动力学特性以固定曲轴转角为周期循环变动[20],因此从控制的合理性角度讲,基于曲轴转角设计的控制器具有更好的控制效果[19-22]。然而,根据现有文献来看,在内燃机中关于曲轴转角域ADRC的相关研究还未见报道。现有的关于ADRC在内燃机上的相关研究,都是基于时域等距而非曲轴域[10, 23-26]。许多典型的算法,比如PID[22]和SMC[19, 27]等,却已经在曲轴域上进行了内燃机转速控制研究。
本文针对船舶柴油机转速控制问题设计了曲轴转角域ADRC控制器,并采用了分缸非线性发动机模型进行验证,该模型可以更真实地体现内燃机工作过程[4, 28]。首先,在上述的发动机模型上进行了大量仿真对比实验,结果表明曲轴转角域ADRC对转速变化的适应性强于时域ADRC,且鲁棒性更强,表现出更好的抗干扰性。最后通过发动机台架试验对仿真结果进行了进一步佐证。
1 发动机模型
本文的研究对象是四冲程六缸高压共轨船用柴油机。图1所示为发动机模型组成框图及热力学参数接口。本发动机模型由5部分组成:进气歧管、排气歧管、气缸、中冷器、涡轮增压器。控制输入是由ECU控制的每缸每循环喷油量,定义为mf。

图1 船用柴油机模型结构框图Fig.1 Schematic diagram of the marine diesel engine
在此模型中,通过对各缸进行独立建模来实现对各缸不均匀性的模拟。另外,通过有限状态机实现对缸内离散的扭矩生成过程的模拟[29-32]。该模型的主要特点是:以每缸燃烧持续期内的指示扭矩替代平均值模型中整个循环的平均指示扭矩,在基本不改变平均值模型结构的前提下实现单缸指示扭矩周期性脉动的特点,进而模拟发动机中瞬时扭矩和转速周期性的波动[33]。因此,本发动机模型可以更好地模拟真实的发动机的转速变化过程,从而使得对控制器的设计和验证更具参考性和实用性。
图2表示本文发动机模型和常用的MVEM中的指示扭矩和转速在一个工作循环内(4π rad)的对比情况。由图2(a)、(b)可知:在本文的发动机模型中,各缸的指示扭矩和所有缸的总指示扭矩都是脉动的,这使得发动机转速具有循环波动的特点(图2(c))。然而,这在一般的平均值发动机模型中不能实现。图中所示的MVEM已验证,而本文所建立的分缸发动机模型在总指示扭矩和平均转速上表现的平均作用效果与MVEM高度吻合,因此可认为本文所建立的模型是准确的。关于本发动机模型的验证以及相关信息可以参见文献[4, 28],对该MVEM更具体的实验验证对比可参考文献[34]。关于分缸平均值模型的介绍可以参见原始文献[33]。
2 控制器设计
2.1 发动机在曲轴转角域上的转动动态模型
在时域上,发动机曲轴的转动动态可以写成:
(1)
式中:Je是曲轴上等效的总转动惯量;Mig是所有气缸指示扭矩的总和;Md表示所有被消耗的扭矩的总和;包括摩擦扭矩Mf、泵气损失扭矩Mp、有界噪声扭矩Mnoise、海浪产生的干扰扭矩Mwave和船舶负载扭矩Ml。对于上述定义的符号,其解释可以参见文献[1]。

(2)
2.2 曲轴转角域上的一阶ADRC
由于Mig(θ)也是控制输入mf的函数,所以式(2)可以重构为:

图2 指示扭矩和转速在分缸发动机模型和平均值发动机模型中的对比Fig.2 Torque and speed in the cylinder-by-cylinder engine model and MVEM
(3)

(4)

如果取状态变量如下:x1(θ)=ne(θ),x2(θ)=f(θ),u(θ)=mf,y(θ)=x1(θ),系统(3)的状态空间模型可写成:
(5)
在曲轴域上取每次控制执行的间隔为Δθ,对一阶系统(5)其离散的线性ESO可表示为:
(6)
式中z1和z2分别表示对系统输出ne(θ)和“总扰动”f(θ)的估计值。
线性误差状态反馈(LESF)控制率可以写成:
(7)
式中:r(k)表示在第k个采样点的目标值。
注1采样间隔Δθ取决于发动机的类型,可表示为: Δθ=πΔv/c,其中,v表示冲程数,c表示汽缸数。Δθ的取值继承了内燃机每一工作循环每缸做功一次的特性。对于本文研究对象,v=4,c=6,因此,Δθ=2π/3(rad)。这表明ESO和LESF是由曲轴转角信号以2π/3(rad)的间隔进行触发的。
2.3 曲轴转角域上的二阶ADRC
式(2)表明柴油机转速控制系统是一阶系统,但由于柴油机系统存在广泛延时的特性,如增压器延时等;另外,柴油机系统中存在各种不确定性以及未建模动态。而二阶ADRC能够更全面地考虑系统的延时、不确定性和未建模动态,可以有效提高控制性能,从而具有更好的适应性和鲁棒性。
对式(2)的左右两边同时取微分得到:
(8)
式(8)可以重构为:

(9)

(10)

选取状态变量为:x1(θ)=ne(θ),x2(θ)=dne(θ)/dθ,x3(θ)=f(θ),u(θ)=mf,y(θ)=x1(θ),系统(10)可以写成状态空间的形式:
(11)
对二阶系统(11)在曲轴域上离散的线性ESO可以描述为:
(12)
式中:z1、z2和z3分别是对系统输出ne(θ)、 dne(θ)/dθ和“总扰动”f(θ)的估计值。
对应的曲轴域上的二阶ADRC的LESF控制率表示为:
(13)
式中r(k)和dr(k)分别表示采样点k处的目标值和其微分值。
注2假设发动机运行在恒定转速ne0,曲轴域的触发间隔Δθ所表示的时间可以等价于时域中Δt=30v/(c·ne0)。对本文研究对象,Δt=20/ne0(s)。这意味着在理论上,当发动机运行在恒定转速ne0时,如果取采样和控制时间为Δt,则曲轴转角域ADRC与时域ADRC是等价的。因此,现有时域ADRC的参数调节方法,例如文献[2-3],完全可以用在本文的控制方法中。
注3尽管注 2表明在恒定转速下时域ADRC与曲轴转角域ADRC的等价性,但是却有不同之处。首先,发动机转速不可能保持恒定,会在某个设定值附近波动。因此,在时间域上,实际采样时间Δt会随着转速的波动而变化,但是在曲轴域上对应的Δθ是恒定的。另外,在时域ADRC中采样时间Δt需要参与ESO的计算,这就意味着当转速变化导致Δt偏离其原来转速下的值时,时域的ESO的估计性能会受影响。相反,曲轴转角域ADRC中,其采样和控制在时域上可以看成变周期进行的,这使得其具有一定程度的适应性能力。
3 仿真和结果分析
本节对以下4类,5个不同的控制器进行比较:
1)曲轴转角域二阶ADRC(CA-2ndADRC)。如式(12)、(13)所述。根据注 2,初步地将ESO的参数设计为[β1β1β3]T=[120 4 800 64 000]T,通过试错法可将控制率的参数设计为[kpkdb0]T=[8.7 0.7 30]T。
2)时域二阶ADRC。为了更好地说明时间域ADRC在船舶柴油机转速控制中参数适应性差的现象,设计了2组不同参数的控制器:
①根据注 2,在转速为1 800 r/min附近对其进行参数设计,此时采样步长为Δt=20/1 800≈0.011 s。ESO参数[β1β1β3]T和控制率参数[kpkdb0]T设计成与CA-2ndADRC一样,定义为TB-2ndADRC-a。这是传统的ADRC控制器,如韩京清教授著作[32]所述。此控制器是用来凸显在同样的参数下曲轴转角域ADRC与时域ADRC之间的区别。
②在控制器TB-2ndADRC-a的基础上对控制率参数进行了再整定,通过折衷处理使其能够在更宽的转速范围内取得较好的控制效果,整定后的控制率参数为[kpkdb0]T=[5.5 0.46 40]T,定义为TB-2ndADRC-b。
3)曲轴转角域一阶ADRC(CA-1stADRC)。如式(6)、(7)所述。根据注 2,对应的ESO参数可以设计为[β1β2]T=[200 2 000]T。控制率参数为[kpb0]T=[200 90]T。
4)曲轴转角域PID(CA-PID)。为了对比本文所述的控制器的优越性,设计一个基于曲轴转角的PID与之对比。如文献[4]所述,此处的PID可以写成:
(14)
CA-PID的参数先通过Z-N调节规律得到,再综合考虑系统的稳态和动态性能进行折衷处理,同时,对“积分漂移”现象进行了处理。最终,其参数设计为[kpkikd]T=[1.5 0.2 0.11]T。
3.1 曲轴转角域ADRC的速度跟踪性能
图3(a)所示的是船舶柴油机中常见斜坡式转速曲线。可以看出:在发动机运行在较高转速时(图3(b)区间,〈1,2〉),TB-2ndADRC-a中的跟踪误差还可以接受,但是在低速阶段,发动机转速明显震荡。而在CA-2ndADRC中,在图中所示的转速范围内均能保很小的跟踪误差。值得强调的是,除了采样和控制周期不同,CA-2ndADRC与TB-2ndADRC-a的其他参数相同。这说明曲轴域ADRC具有比时域ADRC更好的随转速变化的适应性。同时,也表明在船舶柴油机转速控制中,时域ADRC需要更多参数标定的工作。
在TB-2ndADRC-a的基础上兼顾对低速阶段目标转速跟踪的性能,整定控制率参数得到TB-2ndADRC-b。由图3(c)并结合图3(b)可知:与TB-2ndADRC-a相比,TB-2ndADRC-b在低转速时其速度跟踪效果变好,但在图中转速范围内依旧比CA-2ndADRC的转速波动大。这表明:虽然时域ADRC通过适当的参数整定可以在一定范围内兼顾不同转速范围内的转速跟踪性能,但是很难达到与同阶次的曲轴域ADRC相同的控制效果。

图3 曲轴转角域二阶ADRC控制器与其他4个控制器的转速跟踪性能对比Fig.3 Speed tracking comparisons between the CA-based second-order ADRC and the else four controllers
CA-1stADRC在低速阶段(图3(d)区间<1>)有轻微震荡,且在过渡过程中(图3(d)区间<2,3,4,5>),CA-1stADRC的跟踪误差明显大于CA-2ndADRC;而在其他稳态情况下两者的跟踪误差相差不大。这表明:曲轴域二阶ADRC的动态性能要优于曲轴域一阶ADRC。如前文所述,这是由于前者能够更充分地考虑系统的不确定性。
由图3(e)明显可以看出:在整个过程中CA-PID的跟踪误差都明显大于CA-2ndADRC,尤其是在低速阶段(图3(e)区间<1>)和过渡过程(图3(e)区间<2,3,4,5>)。
为了更进一步比较,表1给出了上述除TB-2ndADRC-a以外的其他4个控制器在曲轴域上的误差绝对值积分(IAE)值。由表1可知:CA-2ndADRC的IAE值最小,CA-PID的最大;CA-1stADRC与TB-2ndADRC-b的IAE值相同,但是CA-1stADRC需要调整的参数却比TB-2ndADRC-b的少。这也表明:曲轴域ADRC具有比时间域ADRC更好的转速跟踪性能;低阶的曲轴域ADRC能够达到高阶的时间域ADRC相同的控制性能,但是低阶的曲轴域ADRC需要调整的参数更少。

表1 4个控制器在速度跟踪模式下的积分误差指标对比Table 1 The index of the integral absolute error for the four controllers under speed tracking conditions
3.2 曲轴转角域ADRC的抗干扰性能
船舶柴油机通常面临2种典型的负载干扰,即突变负载和海浪负载。图4(a)所示的是负载变化情况,图4(b)至(e)表示CA-2ndADRC与其他4个控制器在该负载条件下的速度响应对比。
最直观地可以看到,CA-PID在面临负载突卸(100%负载)时(图4(e))的动态性能(主要表现在恢复时间上)比其他4个控制器都差。
结合图4(b)、(c):TB-2ndADRC-b在负载突变情况下的转速改变量明显大于TB-2ndADRC-a。而前文中提到TB-2ndADRC-b是在TB-2ndADRC-a的基础上通过兼顾低速阶段的转速跟踪性能得到的。这说明在利用时间域ADRC进行内燃机转速控制时存在一个明显的矛盾关系:在某一个转速下优化的控制参数在其他转速下不适用,如果需要得到能适用于较宽转速范围内的控制参数,必须牺牲该转速下的部分动态控制性能。

图4 各控制器间抗干扰性能对比情况Fig.4 The anti-disturbance performance comparisons of the controllers
图4(d)再次表明:曲轴域一阶ADRC的动态性能比二阶的差。结合图4(c)可知:曲轴域一阶ADRC与时域二阶ADRC的控制性能相近,但是前者需要整定的参数少。
表2所示的是在IAE指标下,上述5个控制器的IAE值对比情况。曲轴域二阶ADRC的IAE指标远小于其他4个控制器,而经优化后的时域二阶ADRC与曲轴域一阶ADRC效果相当,更进一步证明了曲轴域ADRC在船舶柴油机转速控制中的优越性。如前文所述,由于TB-2ndADRC-a的参数更适合1 800 r/min附近,因此TB-2ndADRC-a的IAE值比TB-2ndADRC-b中的小。进一步表明:对时域ADRC,为了兼顾更宽转速范围内的控制效果,必须对控制参数进行多个转速条件下的折衷或对不同转速进行参数标定,而在曲轴域ADRC中,控制参数对转速变化的适应性强,某一转速或工况下整定的参数能够满足大部分其他转速和工况下的控制性能,因此,能够减少参数的标定,节省人力物力。
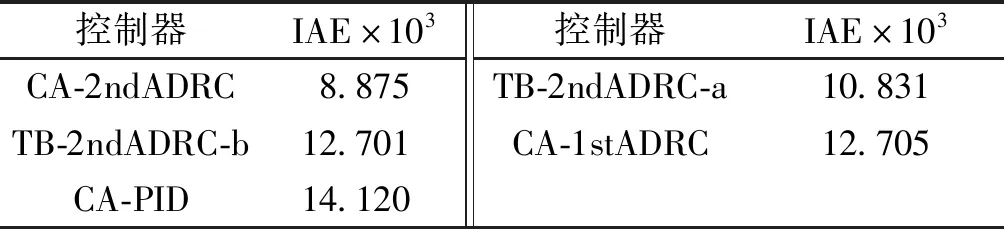
表2 5个控制器在负载扰动情况下的积分误差指标对比Table 2 The index of the integral absolute error for the five controllers under disturbance load conditions
图5所示的是在上述负载干扰过程中,曲轴域二阶ADRC与经参数优化和折衷处理后的时间域二阶ADRC中补偿项z3(k)/b0的对比情况,其中前者的补偿项的变化明显快于后者,这也解释了前者的抗干扰性能强于后者的原因。

图5 负载干扰下曲轴转角域二阶ADRC和时间域二阶ADRC中补偿项的对比情况Fig.5 The comparisons of the compensation items for the CA-based second-order ADRC and the time-based second-order ADRC
4 发动机台架试验
实验所用发动机为康明斯六缸高压共轨柴油机,型号为ISBE 185 32,其总排量为5.9 L。尽管该发动机为车用,但是已经针对船用的特点进行了控制策略的调整,即转速闭环控制。对于验证本文控制策略验证,采用该发动机是合理的。
针对船用发动机应用时转速范围宽、负载状况多变的特点,本文设计在参考转速为1 200 r/min时突卸200 N·m负载扭矩,在1 600 r/min时突卸300 Nm负载扭矩,以验证控制器对不同参考转速和不同负载扰动的鲁棒性。在上述2种状态下,曲轴域ADRC与常规PID的实验结果对比分别如图6(a)和(b)所示。需要首先说明的是,由于实际中很难做到2次实验在同一固定的时序卸载,因此图6所示的CA-PID与CA-ADRC对应的曲线在卸载开始时刻并不完全重合。由图可知,常规CA-PID对参考转速和负载扰动的变化很敏感:在1 200 r/min,突卸200 N·m时其调节时间与对应的CA-ADRC相近,只是超调量比CA-ADRC大10 r/min左右;而在1 600 r/min,突卸300 N·m时,CA-PID的调节时间是CA-ADRC的1.5倍左右,超调量是CA-ADRC的2倍多。同时,就稳态转速波动这一指标,CA-ADRC明显比CA-PID小。综上所述,CA-ADRC具有比CA-PID更好的鲁棒性。尽管采用变增益原理可以继续提高CA-PID的控制性能,但会增加控制器标定的时间和成本;而 CA-ADRC一组控制参数能够适应的工况比CA-PID多,从而在实际控制器设计中可以减少参数标定所需要的人力物力。
对于基于时间的ADRC控制器,实验结果与仿真结果类似:不能兼顾多个参考转速下的稳态转速波动。此处不再赘述。同时,试验结果也发现:曲轴域二阶ADRC虽然能够减少超调量,但其稳态转速波动比一阶ADRC大,其主要原因在于实际发动机中转速本身受噪声干扰且其测量过程亦存在噪声影响,从而导致其稳态性能不佳。限于篇幅,本文先不对如何提高二阶曲轴域ADRC的稳态控制性能做过多讨论。

图6 不同参考转速和负载条件下进行负载突卸的转速响应Fig.6 The control performance under different reference speed and load condition with sudden unloading
5 结论
1)曲轴转角域ADRC的控制性能比时域ADRC和曲轴转角域PID优越,能够在更宽的转速范围内保持良好的速度跟踪性,具有良好的转速适应性。
2)在抗扰动方面,曲轴转角域ADRC在100%负荷突加、突卸的情况下具有更小的转速超调和更短的恢复时间,且在海浪负载干扰下其转速波动最小。这表明曲轴转角域ADRC 具有比时域ADRC和曲轴转角域的PID更好的适应性和鲁棒性。而且,基于文中发动机试验结果,可以进一步判定,实际应用于柴油机转速控制时曲轴转角域ADRC需要标定的工况会相对减少。
3)由于本研究是在分缸发动机模型上进行的,因此比以往文献中基于MVEM的研究更具有参考价值。最后的台架试验结果亦表明本文提出的曲轴转角域ADRC具有可行性,且相对于传统曲轴域PID具有更好的鲁棒性和适应性。
尽管本文只研究了曲轴转角域ADRC在船舶柴油机转速控制中的应用,但由于内燃机大多数特性都类似转速在曲轴域上的变化规律,因此,对内燃机中其他量的控制也可以借鉴本文内容,在曲轴转角域中采用基于事件触发的方式进行控制。
猜你喜欢
中等数学(2021年9期)2021-11-22
哈尔滨工程大学学报(2021年10期)2021-11-05
军事运筹与系统工程(2019年4期)2019-09-11
宇航计测技术(2019年1期)2019-03-25
雷达学报(2017年6期)2017-03-26
中学数学杂志(初中版)(2016年3期)2016-06-24
中国水运(2015年1期)2015-02-02
湖南师范大学学报·自然科学版(2014年3期)2014-10-24
汽车与新动力(2013年5期)2013-03-11
