
船舶柴电混合动力系统能量管理控制策略
2020-02-08 02:47肖能齐徐翔周瑞平
哈尔滨工程大学学报 2020年1期
肖能齐, 徐翔, 周瑞平
(1.三峡大学 水电机械设备设计与维护湖北省重点实验室,湖北 宜昌 443002; 2.三峡大学 机械与动力学院,湖北 宜昌 443002; 3.武汉理工大学 能源与动力工程学院,湖北 武汉 430063)
随着节能减排和航运低成本运输等需求加强,如何对船舶动力推进系统的能量进行更加合理化管理是一个亟待解决的问题之一[1-3]。当前主要是针对整个船舶系统的能量管理技术进行研究较多,如国外开发的K-Chief 500和2100能量管理系统等;而对于船舶动力推进系统运行过程中的能量管理进行研究的文献较少。目前船舶动力系统结构和运行工况日益趋于复杂化和多样化,因此对各运行工况下的能量进行优化控制策略研究具有十分重要的意义。
目前国内外学者和科研机构在船舶能量管理、船舶动力系统能量管理控制策略等方面均进行了一定的研究[4-8],Geertsma等[9]以混合动力推进系统为对象,采用动态规划对实时策略进行基准测试,并与现有的基于规则的控制器进行比较。其仿真结果表明,在负载需求未知的情况下,等效能耗最小化策略可以额外节省6%的燃油。Hou等[10]提出了一种新的能源管理策略AMPC,将电力船舶推进系统的发电、电机和混合储能控制相结合,以解决船舶推进负荷波动的影响。与其他方法相比,所提出的AMPC在提高系统效率、提高可靠性、提高推力生产和减少机械磨损方面取得了更好的性能。Vu等[11]为了确保舰船系统的船舶动力推进功率、船舶电力和发电机组功率合理分配,以保持分布式资源与负载设备之间的功率平衡,提出一种基于模型预测控制的能量管理方案,以优化高功率斜坡率条件下蓄能与发电机之间的协调。文中通过仿真与试验相结合的方式验证了该方法的有效性。张益敏等[12]结合国内外船舶混合动力系统的发展,在动力系统推进结构和能量管理方面进行了综述性概述,在能量管理方面主要是围绕基于规则方法和最优化方法的控制策略进行了阐述。丁峰等[13]构建船舶综合电力系统的多参数仿真模型,以船舶燃油消耗最小对最优化目标函数,进行了船舶能量管理控制策略研究。阚志伟等[14]分别构建柴油机模型、电容器模型和锂电池模型的船舶混合动力模型,提出采用坡率法和粒子群算法进行能量管理控制策略最优化研究,对降低船舶能耗具有十分重要的意义。
本文主要是以某海监船舶四机双桨柴电混合动力系统为研究对象,建立柴电混合动力系统能量流模型及分析能量流特点,提出采用基于工况识别的规则能量管理控制策略方法,对船舶柴电混合动力系统进行运营过程中能量进行管理控制。
1 构建船舶混合动力系统能量流
以如图1所示的四机双桨混合动力推进系统为对象,该船舶推进系统有2台MAN 9L48/60B大功率柴油机和2台MAN 6L48/60B小功率柴油为系统提供动力源;其主要作用是将燃油的化学能通过燃烧转化为以扭矩和转速的机械能形式输出(即:ES/M)。减速齿轮箱有与大功率柴油机、小功率柴油机和轴带电动机的3个输入端,传动轴和轴带发电机的2个输出端;其主要作用是将柴油机输出的高转速经齿轮箱减速后传递给传动轴系和可调螺旋桨,其能量转化形式为机械能转化为机械能。

图1 四机双桨混合动力系统Fig.1 Four-engine two-propeller hybrid system
与传动的船舶推进系统相比较,柴电混合动力推进系统中柴油机燃烧产生的机械能经过齿轮箱传递可以驱动轴带发电机发电,其电能需要经过变频装置和配电装置提供给辅助电力装置和用户;其能量转换形式为燃料的化学能转化为机械能再转化为电能。对于如图1所示的船舶柴电混合动力推进系统而言,当2台齿轮箱内的离合器处于不同的状态时,可以实现船舶动力推进系统不同运行工况之间的切换,则有不同的船舶动力系统推进形式,其将对应着不同的能量传递形式。本文通过对不同推进形式的能量特点和能量流规律进行分析与研究,构建了如图2所示的四机双桨混合动力推进系统能量流图。
根据图1所示的柴电混合动力系统结构布置图及其对应的能量转换和能量传递特性可知:通过齿轮箱内离合器的合排与脱排,从而可以完成混合动力系统运行模式和能量传递方式的切换和改变。本文所述的柴电混合动力推进系统一共有12种运行模式,有4种单机推进运行模式、2种双机并车联合推进运行模式和6种PTI推进运行模式组成,各种运行模式其对应的齿轮箱离合器状态和具体推进工况如表1所示。
2 基于工况识别的规则能量管理策略
船舶在实际航行过程中将处于不同的航行海况条件下,则船舶动力系统也处于不同的航行工况条件下,其对应的柴油机转矩、离合器状态和船舶航速等参数也将发生变化。因此为了使船舶航行过程中处于最合理的运行工况条件下,本文提出基于航行工况模糊模式识别的规则能量管理控制策略对船舶航行工况进行优化。

图2 四机双桨混合动力推进系统能量流Fig.2 Energy flow diagram of four-engine two-propeller hybrid propulsion system
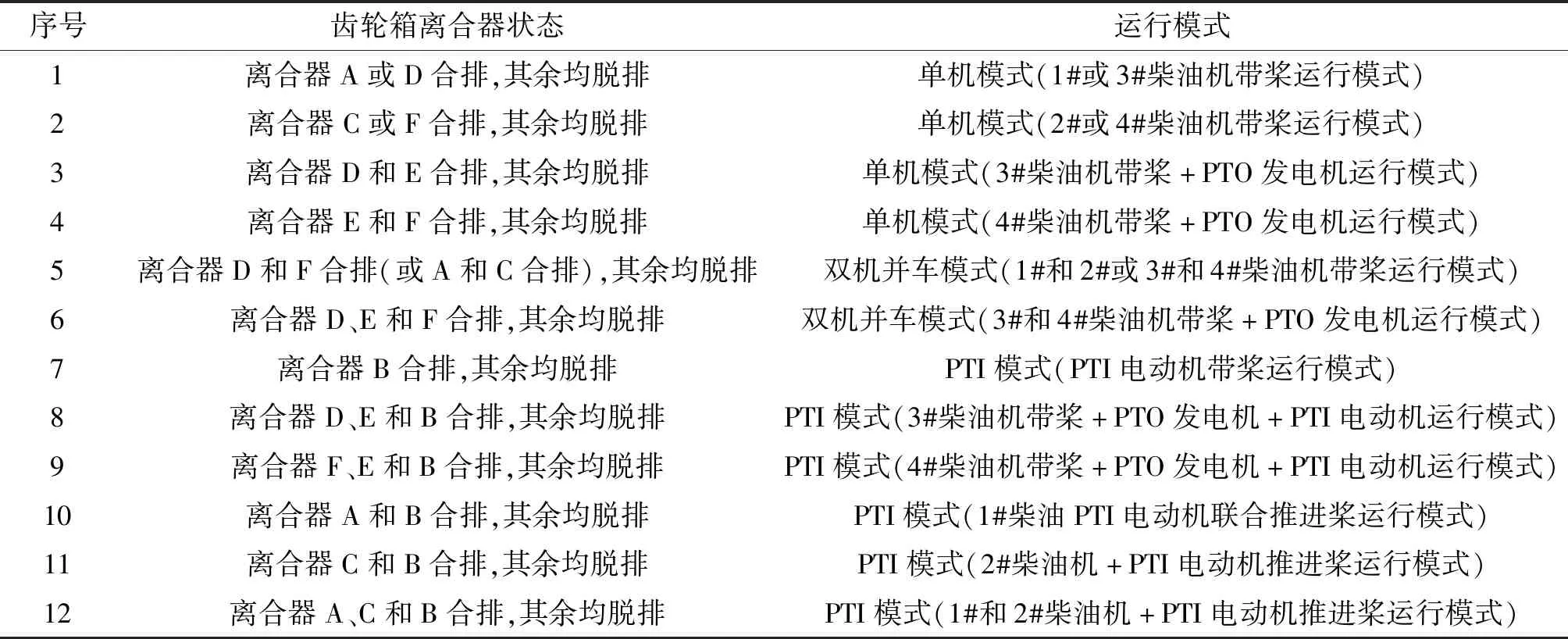
表1 船舶四机双桨混合动力推进系统的12种运行模式Table 1 12 operating modes of ship four-engine double-propeller hybrid propulsion system
2.1 航行工况模糊模式识别模型
通过提取m个用于船舶柴电混合动力系统工况识别的特征参数值,则对于每个待识别工况均有m个特征参数值,因此对于n个待识别工况可以构建m×n阶的特征参数值矩阵X:
(1)
式中xij为第j个待识别工况的第i个特征参数所对应的值。
为了将待识别工况与标准航行工况进行对比与航行工况模糊识别,需要根据柴电混合动力系统的工况特点,制定h种标准航行工况;同理,可以构建m×h阶的特征参数值矩阵Y:
(2)
式中yik为第k个标准航行工况的第i个特征参数所对应的值。
由于n个待识别工况和h个标准航行工况的特征参数在量纲上存在差异,因此可通过如下式(3)和式(4)消除n个待识别的m×n阶的特征参数值矩阵X和h个标准航行工况m×h阶的特征参数值矩阵Y指标量纲:
(3)
(4)
式中:rij第j个待识别工况的第i个特征参数值隶属度;sik第k个标准航行工况第i个特征参数值隶属度。
通过式(1)~(4)对特征参数进行归一化处理,可以得到n个待识别工况特征值和h个标准航行工况特征值的相对隶属度矩阵式(5)和(6):
(5)
(6)
为了将待识别的n个工况根据转矩、航速和齿轮箱离合器状态等m个特征参数按照混合动力推进系统船舶的h种标准航行工况进行识别,则模糊识别矩阵为:
(7)
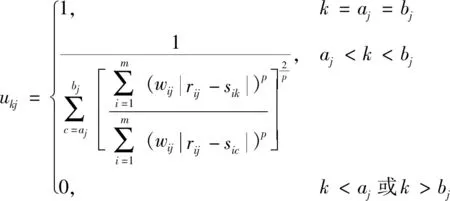
将待识别工况j的m个特征参数的相对隶属度分别与标准航行工况k的特征参数相对隶属度进行逐一比较后,得到m个特征参数相对优属度分别介于相邻级别区间[a1j,b1j],[a2j,b2j],…,[amj,bmj],则可以得到待识别工况j的级别上限值bj和级别的下限值aj:
(8)
本文通过构建工况j对标准航行工况k之间的权广义距离平方和最小的目标函数,以求解待识别工况j对标准航行工况k的最优相对隶属度:
(9)

构造式(9)在ukj约束条件下极值变为无条件极值问题求解的拉格朗日函数:
(10)
对式(10)求导可得:
(11)
(12)
通过式(11)和式(12)可得:
(13)
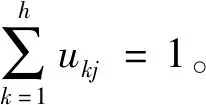
根据式(8)和(13)可以得到待识别工况j对于标准航行工况k的最优相对隶属度模糊识别理论模型为:
(14)
2.2 基于规则的能量管理控制策略
在基于航行工况模糊模式识别的方法对船舶运行工况进行识别的基础之上,对船舶柴电混合动力系统的运行工况进行进一步最合理的优化,提出基于规则的能量管理控制策略。其主要是采取基于逻辑门限值的方式设定柴油机的工作转速和转矩、船舶航行的平均航速、电机工作转速和转矩和船舶需求转矩等门限参数,从而使柴油机处于高效率曲线区间允许,以便于对能量进行最优化控制规则与分配规则,使船舶动力系统的燃油经济性得到提高以及减少温室气体和硫化物等有害气体的排放。根据表1所示的船舶四机双桨混合动力推进系统的12种运行模式和图2所示的混合动力系统能量流特点,建立如图3所示的四机双桨混合动力推进系统工作模式切换规则图。
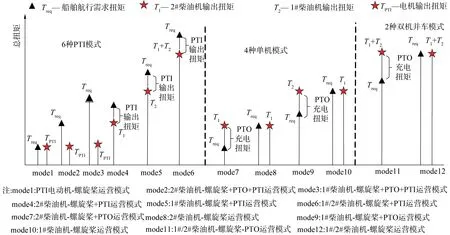
图3 四机双桨混合动力推进系统工作模式切换规则Fig.3 Working mode switching rule diagram of four-engine two-propeller hybrid propulsion system
在图3中针对该柴电混合动力系统的12种运行制定了合理的工作模式切换规则,根据规则能量管理控制策略方法设计了系统运行工况的运行工况模式进行逻辑判断。从而达到对混合动力推进系统的能量进行最优化分配规则与控制规则,如表2所示给出了该船舶动力系统的能量控制规则。

表2 在航行过程中船舶混合动力推进系统的能量控制规则Table 2 Energy control rules of ship′s hybrid propulsion system during navigation
注:Treq船舶航行需求扭矩;T2 min为1#柴油机最优油耗对应的最小扭矩;T1为2#柴油机输出扭矩;T2为1#柴油机输出扭矩;T2max为1#柴油机最优油耗对应的最大扭矩;TPTI为PTI电动机输出扭矩;T1 min为2#柴油机最优油耗对应的最小扭矩;T1max为2#柴油机最优油耗对应的最大扭矩;TPTO为轴带发电机充电所需扭矩;TE-PTI为PTI电动机最大输出扭矩。
根据上述图3和表2中所示的系统规则模式切换规则和能量控制规则,可得如图4所示的四机双桨混合动力推进系统能量管理控制规则判断流程图。该动力系统的判断流程图主要是在基于航行工况模糊模式识别的方法对船舶运行工况进行识别的基础之上,根据能量管理控制规则判断流程图对当前船舶航行工况进一步的合理优化。
3 混合动力系统能量管理控制策略实例分析
基于航行工况识别规则能量管理控制策略方法:首先在船舶航行过程中,提取待识别工况特征参数,采取模糊模式识别模式对当前航行工况进行识别;然后根据柴电混合动力推进系统的能量控制规则对其进行进一步优化,最后通过指令切换各部件的运行状态,使其在最优的工况下运行,如图5所示的基于工况识别的规则能量管理控制策略原理图。

图4 四机双桨混合动力推进系统能量管理控制规则判断流程Fig.4 Energy management control rule judgment flow chart of four-engine two-propeller hybrid propulsion system

图5 基于工况识别的规则能量管理控制策略原理Fig.5 Schematic diagram of regular energy management control strategy based on condition recognition
本文首先根据该混合动力系统的运行特点,将标准航行工况分为低速航行工况、经济巡航工况和高速航行工况3种;同时选取齿轮箱离合器合排个数n、输入端的平均转速Vr、加/减速时间百分比η、输入端的平均功率Pr以及加速度标准差astd等5个工况识别特征参数,如表1所示给出了3种标准航行工况的特征参数值。
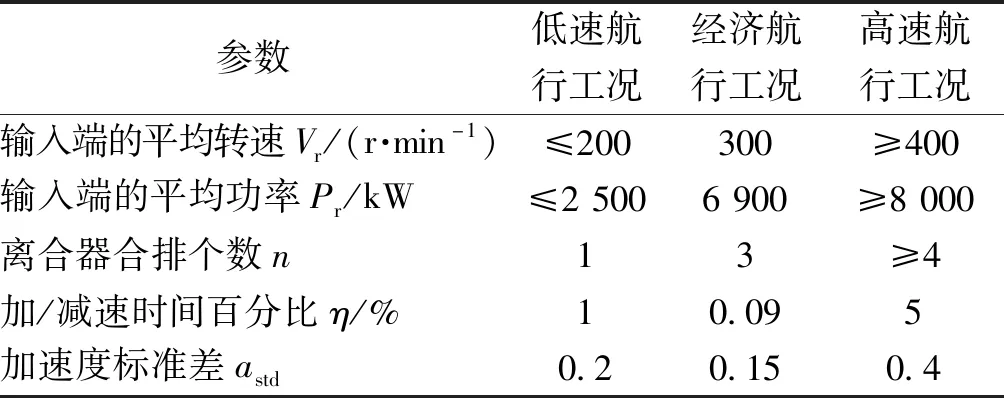
表2 3种标准航行工况特征参数Table 2 Characteristic parameters of three standard operating conditions
根据2.1节所述,通过对所提取齿轮箱离合器合排个数n、输入端的平均转速Vr、加/减速时间百分比η、输入端的平均功率Pr以及加速度标准差astd的5种特征参数进行归一化处理后,经计算可得3种标准航行工况特征值相对隶属度矩阵:

(15)
本文选取3个待识别工况,其个待识别工况的特征参数向量为X1=(220,3 000,2,1.2,0.22)、X2=(310,6 200,3,2,0.2)和X3=(370,7 200,4,2.5,0.3)。同理可以对特征参数进行归一化处理后,可得3个待识别工况的相对隶属度矩阵:

(16)
由于待识别工况的特征参数在船舶航行工况模式识别过程中均具有不同的权重,因此通过式(17)、(18)计算各参数的权重向量W:
(17)
(18)
根据表2中的3种标准航行工况下特征参数值及式(17)可得到yi:
y=[0.733 0.517 0.750 0.591 0.880]
(19)
根据3个待识别工况的特征参数向量X1、X2和X3以及式(18)和式(19),可得3个待识别工况特征参数对应的权重模糊向量:
W1=[0.211 0.149 0.216 0.170 0.253]
W2=[0.206 0.213 0.224 0.197 0.160]
W3=[0.193 0.194 0.234 0.192 0.187]
(20)
取距离参数P=2时,待识别工况j对于标准航行工况k的最优相对隶属度模糊识别理论模型式(14)可以变换为:
(21)
将3种标准航行工况特征值相对隶属度矩阵S、3个待识别工况相对隶属度矩阵R以及3个待识别工况X对应的权重模糊向量W的值代入式(21),可得待识别工况分别对标准航行工况的相对隶属度为:
u1=[0.794 4 0.166 1 0.039 6]
u2=[0.104 1 0.775 8 0.120 1]
u3=[0.085 6 0.313 4 0.601 0]
(22)
根据式(22)计算可得在船舶航行过程中,3个待识别工况X1、X2和X3分别相对于低速航行工况、经济巡航工况和高速航行工况3种标准航行工况的相对隶属度u1、u2和u3值。在待识别工况X1的相对隶属度u1中,最大值为向量0.794 4,则待识别工况X1属于3种标准航行工况中的低速经济航行工况;在待识别工况X2的相对隶属度u2中,最大值为向量0.775 8,则待识别工况X2属于3种标准航行工况中的经济巡航工况;在待识别工况X3的相对隶属度u3中,最大值为向量0.601 0,则待识别工况X3属于3种标准航行工况中的高速航行工况。运用基于航行工况模糊模式识别的方法比较待识别工况与标准航行工况的5个特征参数的相似程度,从而确定待识别工况属于哪一种表中航行工况;然后采取逻辑门限值设计与控制的规则能量管理控制方法,进一步确定最优的柴电混合动力推进系统运行模式。
4 结论
1)针对船舶四机双桨柴电混合动力推进系统的4种单机模式、6种PTI模式和2种并车模式的12种运行工况各自的运行特点以及运行过程中各组成部件的运行状态和能量传递特点进行了归纳与研究;
2)本文提出了基于工况识别的规则能量管理控制策略对船舶柴电混合动力推进系统能量进行统一管理和分配,首先选取齿轮箱离合器合排个数n、输入端的平均转速Vr、加/减速时间百分比η、输入端的平均功率Pr以及加速度标准差astd5个参数作为船舶航行工况识别的合理特征参数,其次提取船舶航行工况的特征参数并建立标准航行工况,运用所建立的航行工况模糊模式识别模型识别样本所属的航行工况,即实现航行工况识别;最后基于规则的能量管理控制策略和混合动力推进系统制定的能量管理控制规则判断流程图,进行最优工况选择。
猜你喜欢
湖南大学学报(自然科学版)(2022年8期)2022-09-02
舰船科学技术(2022年10期)2022-06-17
能源工程(2022年2期)2022-05-23
现代电力(2022年2期)2022-05-23
疯狂英语·新读写(2021年6期)2021-08-05
杭州电子科技大学学报(自然科学版)(2020年6期)2020-12-03
儿童故事画报(2020年7期)2020-08-03
小学科学(2020年6期)2020-06-22
中国交通信息化(2019年12期)2019-08-13
消费导刊(2018年10期)2018-08-20
