
基于特征点匹配的图像配准与融合算法
2020-01-26 05:49杨小青
电脑知识与技术 2020年34期
关键词:图像融合
杨小青
摘要:图像重建技术是图像处理领域中的重要环节,将不同视角下的多重图像重建为高清完整全方位目标像需要进行图像配准、拼接以及融合,以最大限度保留原场景的完整性。本文主要研究在拼接过程中的图像配准和融合算法,应用SIFT算法查找确定特征点、特征向量进行特征匹配,采用RANSAC算法直线拟合优化重叠区域较多的目标图像,同时对连接缝进行平滑处理,以人工湖图像拼接验证,算法实现良好融合效果。
关键词:图像拼接;SIFT算法;RANSAC算法;图像融合
中图分类号: TP18 文献标识码:A
文章编号:1009-3044(2020)34-0198-02
在图像处理领域,将不同视角下的多重图像重建为全方位目标像是一个重要研究内容,要对不同目标像依次进行配准、融合,以最大限度保留原场景完整性,获得全视野图像。图像重建[1]技术对多种行业发展起到重要作用,对图像拼接融合技术研究具有应用价值。本文主要研究在拼接过程中的图像配准的算法以及图像拼接和融合的算法,主要应用尺度不变特征转换SIFT(Scale Invariant Feature Transform)算法[2]查找确定特征点、特征向量进行图像之间特征点匹配,以及随机抽样一致性RANSAC(Random Sample Consensus)算法[3]对重合区域较多的不同目标像进行直线拟合,消除无关点,精简高效实现图像配准与拼接。
1图像特征向量提取
图像配准是将不同时间、视角、拍摄环境下获取到的两幅甚至多幅图像进行叠加、去重、匹配等过程处理,以得到单一目标像。在图像数据信息中,特征点保留了图像关键信息,通过扫描搜索,根据特征性质查找提取待拼接图像的特征点,生成特征向量表,对比待匹配图像之间的特征集合,对提取的关键信息进行特征处理,同时借鉴其他信息符号,有利于提高算法匹配速度和效果,适用范围较广,增强了匹配准确性。
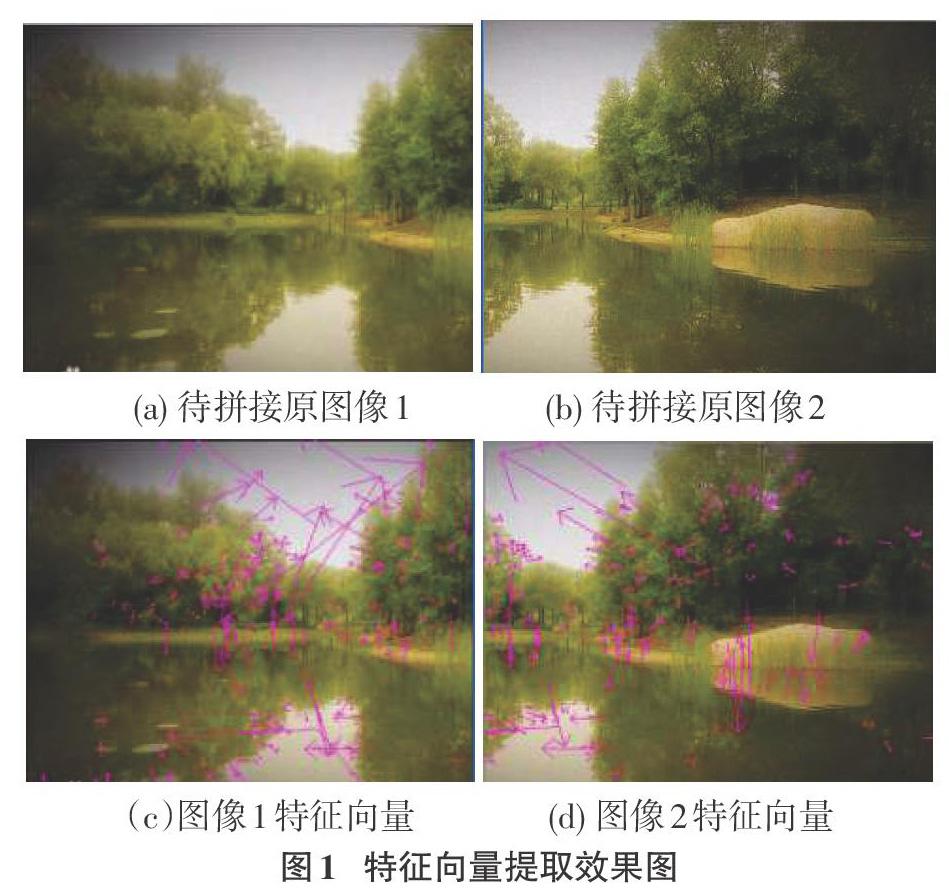
SIFT算法通过描述图像的局部性特征实现图像配准,其核心思想:在尺度空间中扫描搜索,寻找极值点,提取相应尺度、位置和旋转不变量等信息。依次比较周围像素,在不降低准确度的原则下删减数据信息点,选取出最终关键点作为特征点,并生成不因图像变化产生影响的特征向量,找出关键点的方向特征、位置及尺度,为保证尺度和方向变化无关性,选取特征点的邻域梯度的主方向[4]。为加快算法收敛速度,提高图像处理实效性,采用图像归一化[5]预处理图像优化算法,降低匹配误差。选取公园人工湖显示算法运行效果如图1.1所示:
可以看出,该算法能较好实现特征向量提取,图中箭头所指方向为特征向量方向,箭头长度为大小。
2特征点匹配
图像特征匹配在提取特征向量后,根据待拼接图像的特征点匹配程度予以匹配,采用两幅图像关键点之间的欧氏距离比作为判定准则寻找相同特征点及特征向量[6]。匹配过程是找到待拼接原始图像1中的关键点,遍历搜索待拼接原始图像2中与该点欧式距离最近的关键点,计算确定匹配点。
SIFT算法实现特征点匹配获取到较多特征点信息,能较好满足精确匹配,但遇到重叠部分较多的待匹配图像时往往产生数量较多的特征点信息,容易影响整个算法运行的时间效率甚至造成错误匹配,同时,如果两幅图像中互相匹配的特征点位置不是一一对应时,又容易增加计算误差,使得在后续拼接过程中出现错误。
RANSAC算法可以实现从一组包含误差数据点的众多观测数据集中,通过迭代的方式估计数学模型的参数。RANSAC算法将与拟合直线无关的局外点舍弃掉,只利用局内点即可以完成很好的拟合,拟合效果是较为理想的直线,从而保证足够高的参数选择合理性概率。
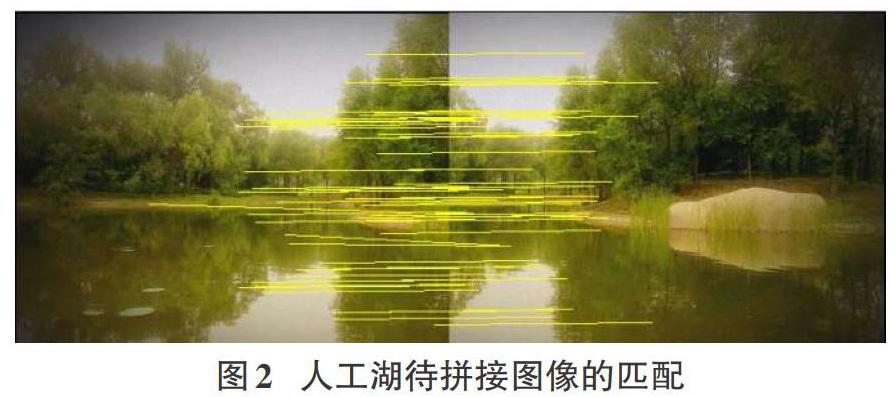
图2所示经过SIFT算法特征提取后,采用RANSAC算法进行特征点匹配后人工湖图像匹配效果。可以看出,本文算法能得到较好的匹配效果,算法运行稳定。
3图像拼接与融合
图像拼接与融合技术是将同一场景、不同视角及拍摄环境下彼此之间存在相互重叠区域的图像进行配准、无缝拼接生成全视野图像,过渡平滑处理拼接缝之后获得高清完整视野图像的技术。
3.1图像拼接
要完成图像拼接,仍然需要分别获取待匹配图像的特征点及特征向量,按照上述论述内容,通过判定特征点匹配程度完成图像拼接。从一个视角图像开始采用增量的方式依次对相邻视角图像进行拼接,在拼接过程中,率先完成拼接的图像保持不变,所在的坐标也视为固定不变,已完成拼接图像继续作为新的视角参考图像,将相邻视角的图像依次变换到这一固定坐标系下,依次重复上述过程进行拼接直到完成配准、拼接。
将后续拼接图像转换到当前坐标系时需要采用双线性差值法[7],进行相应的参数变换,由于图像的像素点一般采用固定整数描述,经过变换會产生新的像素点,此时可能不是用固定整数来表示像素。因此需要对变换后的图像重新采样,获取符合要求的图像。双线性差值法能有效查找到当前视角待拼接图像与下一视角待拼接图像的特征点,求得变换参数,并完成下一视角图像的坐标变换,使其满足与前一视角图像在相同的坐标系下。双线性差值法具有很好的精度特性,算法耗时较短,而且在图像边缘处的拼接过渡性较好。
3.2图像融合
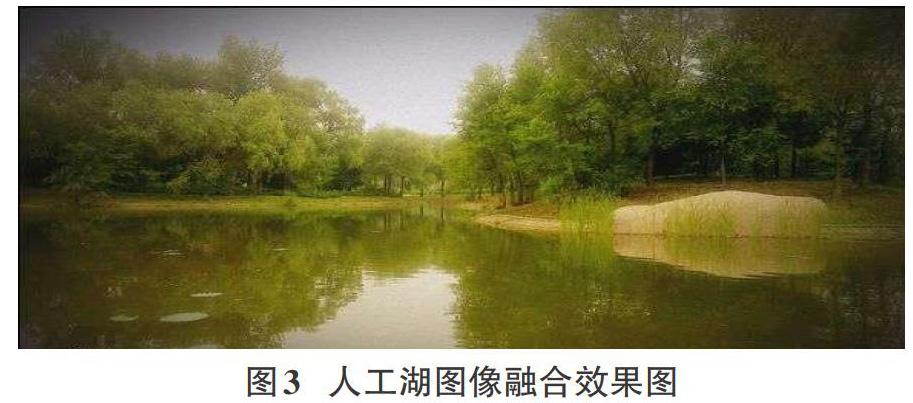
按照上述算法过程完成图像特征匹配拼接后,通常由于不同视角图像的采集时间、环境和条件等因素,使得拼接后图像连接处呈现出过渡不自然的现象,有必要采取相应的技术手段进一步处理拼接所得图像、平滑过渡图片拼接缝,使得拼接后的图像在亮度、形态上更好的融为一体,这一过程称之为图像融合[8]。只有充分利用描述图像的数据信息,融合图像多波段信息,消除拼接对抗信息才能提高图像识别的鲁棒性及精确性,实现高效的图像融合。本文采用数据级的融合方式,最大限度地保持直接获取到的目标图像的原有数据信息。拼接后的人工湖图像融合效果图如图3所示。
可以明显看出拼接后的完整图像实现了较好无缝拼接效果,过渡流畅,拼接痕迹不明显。
4总结
本文主要研究不同视角下多重图像重建单一目标像的图像拼接和融合算法,采用SIFT算法选取灰度值明显大于或小于周围相邻点的像素点作为候选关键点提取特征点、特征向量进行特征点匹配,RANSAC算法直线拟合删减无关点,引入图像归一化方法优化实现图像拼接与配准,平滑处理拼接缝,降低了提取图像特征的匹配误差,加快了算法收敛速度,提高了图像处理实效性,最大限度地保留原场景的完整性。以公园人工湖图像为例,完成了图像拼接及融合,实验效果表明,算法过程能够很好地实现图像拼接与融合。
参考文献:
[1] 张鹏飞.图像拼接技术的研究[D].西安:西安电子科技大学,2012.
[2] 朱玉爽.基于尺度不变特征转换的图像检索[D].吉林:吉林大学,2016.
[3] 周亚歌,宁爱林.基于RANSAC算法的2D Metrology在BGA质量检测中的应用研究[J].邵阳学院学报(自然科学版),2016,13(3):108-112.
[4] 贺永兴,欧新良,匡小兰.邻域特征在点云配准中的应用[J].计算机应用,2012,32(3):762-765,769.
[5] 郭伟,赵亦工,谢振华.一种改进的红外图像归一化互相关匹配算法[J].光子学报,2009,38(1):189-193.
[6]刘晓烈.基于结构光扫描仪的数据配准关键技术研究[D].山东:青岛大学,2011.
[7] 薛海龙,王小海.基于双线性差值法的船舶燃油加装精确计算方法[J].浙江交通职业技术学院学报,2012,13(3):41-44.
[8] 姚增凯.基于逆向工程技术的文物数字化建模及应用[D].西安:陕西科技大学,2014.
【通联编辑:唐一东】
猜你喜欢
科学与财富(2017年3期)2017-03-15
现代电子技术(2016年24期)2017-01-19
哈尔滨理工大学学报(2016年4期)2016-11-10
计算技术与自动化(2015年2期)2015-09-09
现代电子技术(2014年3期)2014-03-05
