
电动汽车用六相感应电机开路故障容错控制
2020-01-16 10:20李永岗祝琳陈瑞成耿乙文
微特电机 2020年1期
李永岗,赖 鄹,祝琳,陈瑞成,耿乙文
(中国矿业大学 电气与动力工程学院,徐州 221008)
0 引 言
在多相电机驱动系统中,相数的增加提高了电机系统冗余能力,当一相或者多相定子绕组发生开路故障时,可通过相应的容错控制策略维持气隙磁链不变,保证电机继续平稳运行,大大增加了系统运行的可靠性。与三相电机传动系统相比,采用低功率等级的开关器件可以实现低压大功率调速,多相电机产生的转矩脉动频率更小,运行效率更高,因此多相电机驱动系统特别适合于电动汽车、轨道交通,船舶推进等应用场合。
电机驱动系统大约70%以上的故障都可以等效为电机定子绕组的开路故障或者开关器件的失效[1]。本文研究的容错控制策略主要针对电机的断相故障。传统的容错控制策略是通过优化剩余有效相电流的幅值和相位,使得故障后的电机保持气隙磁势不变[2-5],保证了电机转矩的平稳输出,但此种容错控制策略通常采用电流滞环来实现对电流的跟踪控制,不适合于大功率传动系统。在文献[6]中电流环采用PR控制,实现了相坐标系的无静差控制,但仍需要计算剩余有效相的参考电流,随着电机相数的增加,电流的优化计算变得愈加复杂。文献[7]实现了九相感应电机解耦后磁场定向控制,但是没有考虑谐波平面的电流。
本文推导了六相感应电机发生任意开路故障后的统一数学模型,并通过修正后的旋转解耦变换,实现了电机开路故障下的磁场定向控制。同时,采用比例积分控制器对谐波平面的电流进行抑制。本文分别在电机一相、两相和三相定子绕组开路时为例,研究了本文控制策略的正确性和有效性。仿真和实验结果表明了本文的容错控制策略能够实现电机在开路故障时的无扰运行。
1 电机开路故障下的数学模型
非对称式六相感应电机与对称式六相感应电机的区别在于两套三相绕组的夹角,对称式六相绕组的夹角为60°,而非对称式两套三相绕组的夹角为30°,由两套常规的三相绕组ABC和DEF组成,每套绕组均为Y型连接,内部绕组在空间上互差120°,在状态中性点采用隔离的方式能够有效减少铜耗,在发生开路故障时采用非隔离方式有效减小电流幅值,并且增加了控制的自由度。六相感应电机物理结构图如图1所示。
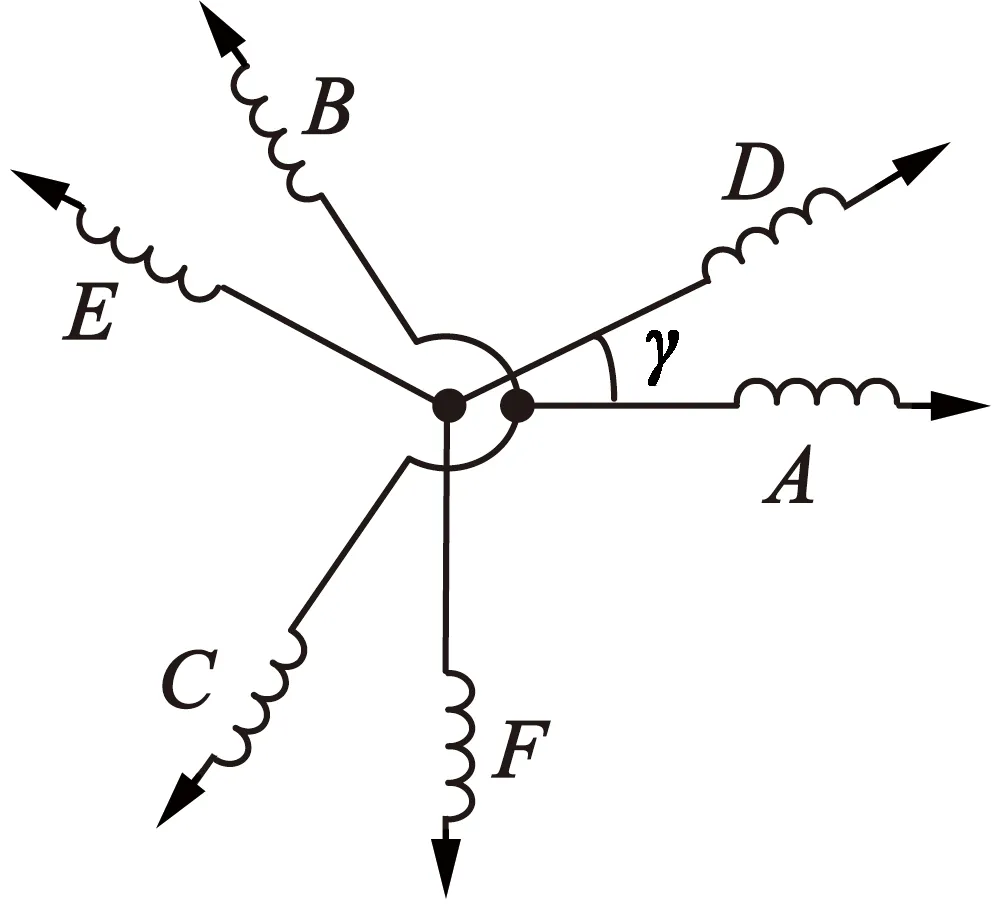
(a) 非对称式两套绕组

(b) F相开路图1 六相感应电机物理结构图
六相感应电机在缺相下的数学模型可以分解到两个平面,分别为基波子平面和谐波子平面,用α,β和z表示,其中α,β子平面涉及机电能量转换,z子平面不涉及能量转换,只会给电机带来损耗。当发生断相故障时,根据定子绕组开路的位置不同,变换到两个子空间内的空间解耦变换矩阵也不同。首先,设开路后α轴与A轴之间的夹角φ0,φ0的求取公式如式(1)所示,当电机在正常状态下时,很显然φ0=0,即两个轴之间的空间位置重合。
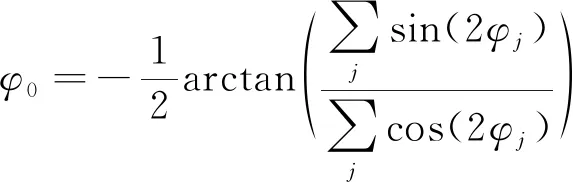
(1)


(2)
(3)
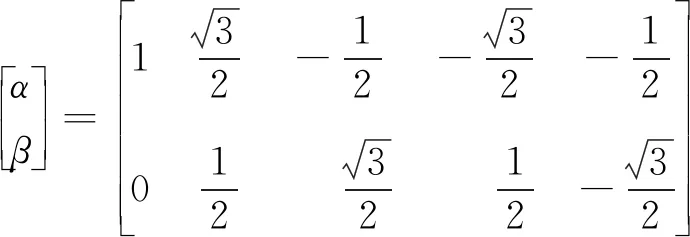
z平面的空间矢量可以通过N-2个标准正交基向量定义,其中N为剩余有效相的相数,并且z平面的空间矢量与α,β子平面空间矢量相互正交,故可以容易地通过MATLAB的null函数求出。以非对称式为例,当电机单相开路时,采用等功率变换可以求出单位化后的空间解耦变换矩阵如下:
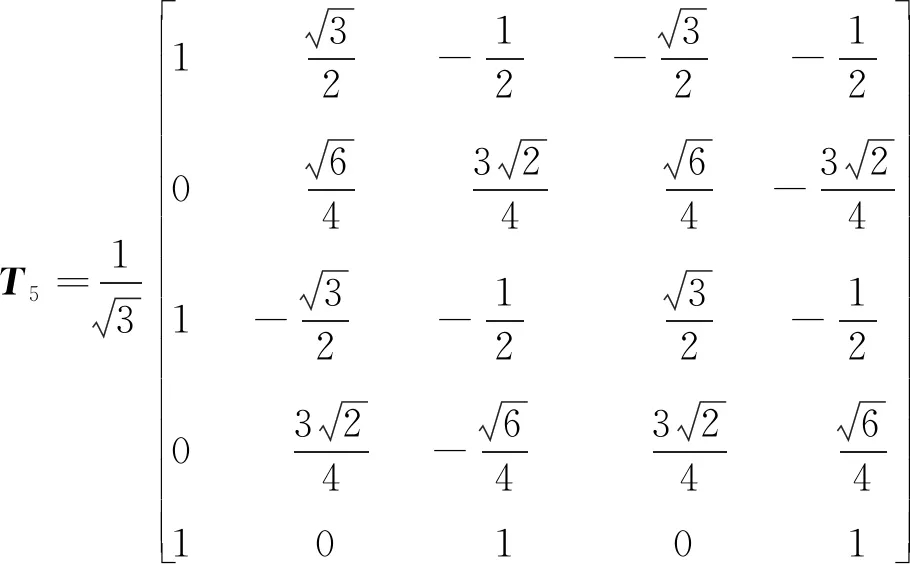
(4)
由此方法得到任意开路故障后的空间解耦变换矩阵TN,将空间解耦变换矩阵TN代入缺相后的定转子电压方程式:
(5)
式中:p为极对数;Us和Ur为定转子电压向量;Is和Ir为定转子电流向量;Rs,Rr为定转子电阻;Lss和Lrr为定转子自感矩阵;Lsr和Lrs为定转子互感矩阵;T6为原始解耦变换矩阵,表达如下:

(6)
然后使用旋转变换矩阵Tr,如下:

(7)

(8)
定转子磁链方程如下:
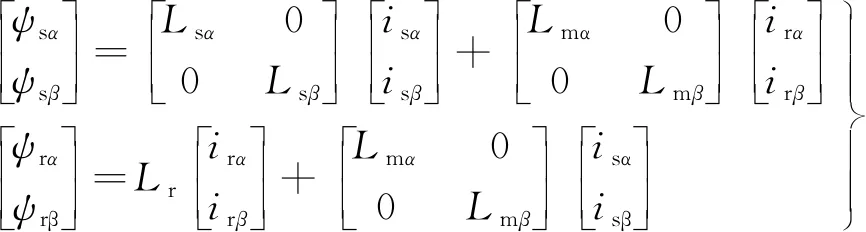
(9)
式中:usα,usβ,urα,urβ,isα,isβ,irα,irβ,ψrα,ψrβ分别为定转子电压、定转子电流、转子磁链在α,β轴上的分量;Lmα,Lmβ分别为开路故障时定转子互感在α,β轴上的分量;Lsα,Lsβ为开路故障时定子自感在α,β轴上的分量;Lr为转子自感;θr为转子位置角;p为微分算子。式(8)、式(9)表明发生定子绕组开路故障后,六相感应电机在α,β子平面为不对称模型,此时的电磁转矩方程:

(10)
式中:p为电机极对数。
设六相感应电机在单相、两相、三相时的定子绕组开路位置结构示意图如图2所示。

(a) 单相绕组开路
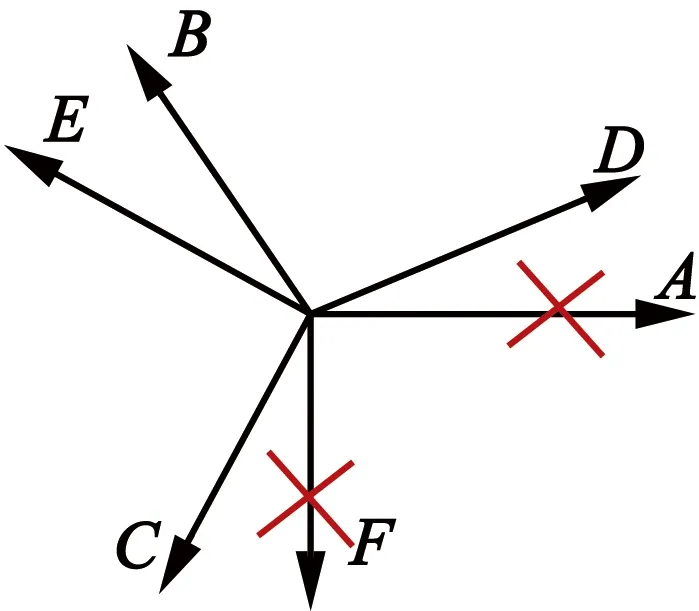
(b) 两相绕组开路
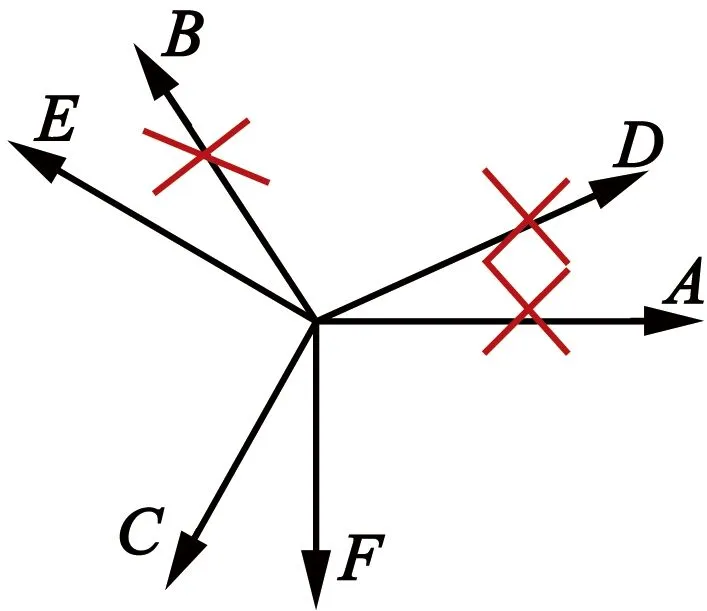
(c) 三相绕组开路图2 定子绕组开路情况
其中,图2(a)为F相开路,图2(b)为A,F相开路,所缺两相磁轴夹角为90°,图2(c)为A,B,D三相绕组开路。本文就此三种缺相故障情况下容错控制策略进行深入研究。
由以上方法可以分别推导出三种定子绕组开路情况下的空间解耦变换矩阵,这里不再详述。将不同缺相下的空间解耦矩阵分别代入式(5),并经旋转变换式(7)将定转子电压方程中转子侧变量变换到定子侧静止坐标系后,可以得到三种开路故障条件下的电感参数,如表1所示。
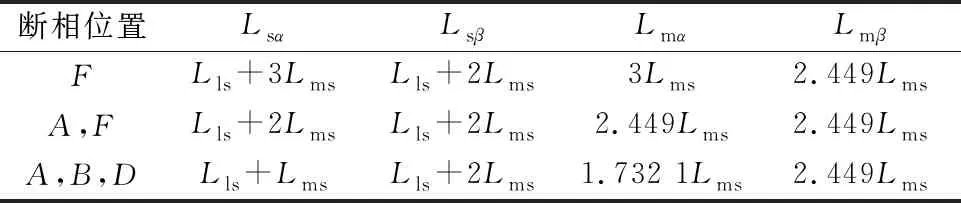
表1 不同缺相情况电感参数
2 电机开路故障下的磁场定向控制

(11)
由式(11)可知,当电机在正常状态时,有Lmα=Lmβ,退化为传统的旋转变换。由于转子绕组仍然对称,其旋转变换矩阵依然对称不变,将两种旋转变换矩阵分别乘以两相静止坐标系下的定子侧和转子侧变量,得到两相旋转坐标系下的转子磁链方程,如下:

(12)
在同步旋转坐标系下的转矩方程:

(13)
根据磁场定向控制的原理,令d轴与转子磁链重合,即磁链完全落在d轴上,q轴的分量为零,即:
(14)
经转子磁链定向后的转子磁链如下:

(15)
磁链定向角:

(16)
转矩方程:

(17)
以上表明,转子磁链仅由isd产生,而电磁转矩仅由isq产生。因此,在两相旋转坐标上实现了定子电流两个分量的解耦控制。通过以上分析,构建六相感应电机统一开路故障下容错控制,如图3所示。电机缺相后,因缺相的位置不同,剩余空间电压矢量情况不同且不对称,难以根据伏秒平衡的原则,通过矢量合成使得z平面的谐波为零,故传统基于SVPWM的调制策略难以推广到各种缺相状况。本文采用文献[9]中载波型PWM调制策略,通过计算剩余有效相的虚拟作用时间、偏移时间、有效作用时间及实际触发时间来获得开关器件的驱动脉冲。z平面内的参考电压分量通过对z平面内的电流分量采用比例积分调节来获得,经过逆变换后可以得到剩余有效相的参考相电压。
3 仿真及结果分析
为了验证本文控制策略的有效性,在MATLAB/Simulink中搭建了完整的系统仿真模型。为了模拟电机在运行中由正常状态突然发生开路故障的情况,在仿真中利用switch模块实现两种状态的切换。仿真过程如下:首先六相感应电机正常起动到稳定状态,然后突然切换到开路故障状态,同时切换到相应的容错控制策略,验证本文的控制策略的有效性与正确性。
本文就电机在图2的定子绕组开路三种情况进行仿真研究。仿真电机参数如表2所示。
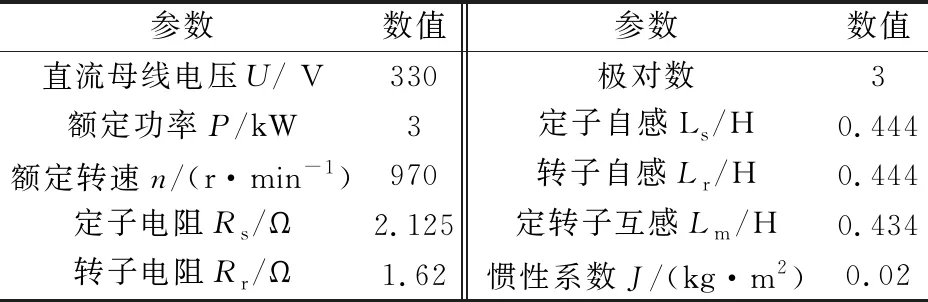
表2 六相感应电机参数表
3.1单相绕组开路故障后的仿真结果及分析
系统的仿真时间设定为0.5 s,给定500 r/min,设定电机空载起动,0.2 s时电机单相开路的同时,切换到相应的容错控制策略,0.25 s时突加10 N·m的额定负载转矩,电机的定子电流波形、电磁转矩、转速波形、谐波平面的电流仿真结果如图4~7所示。

图4 单相绕组开路定子 电流变化波形
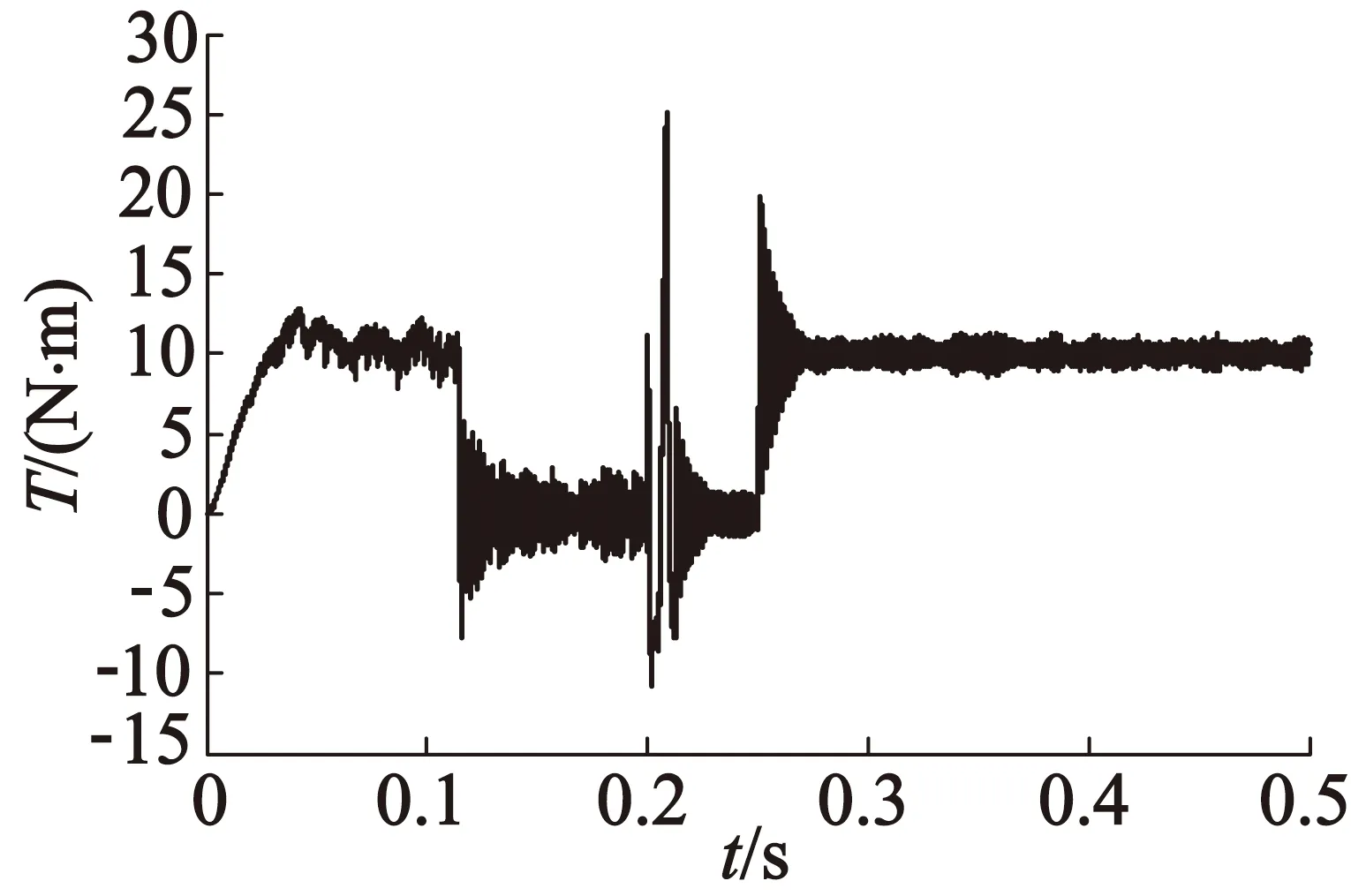
图5 单相绕组开路 转矩变化波形
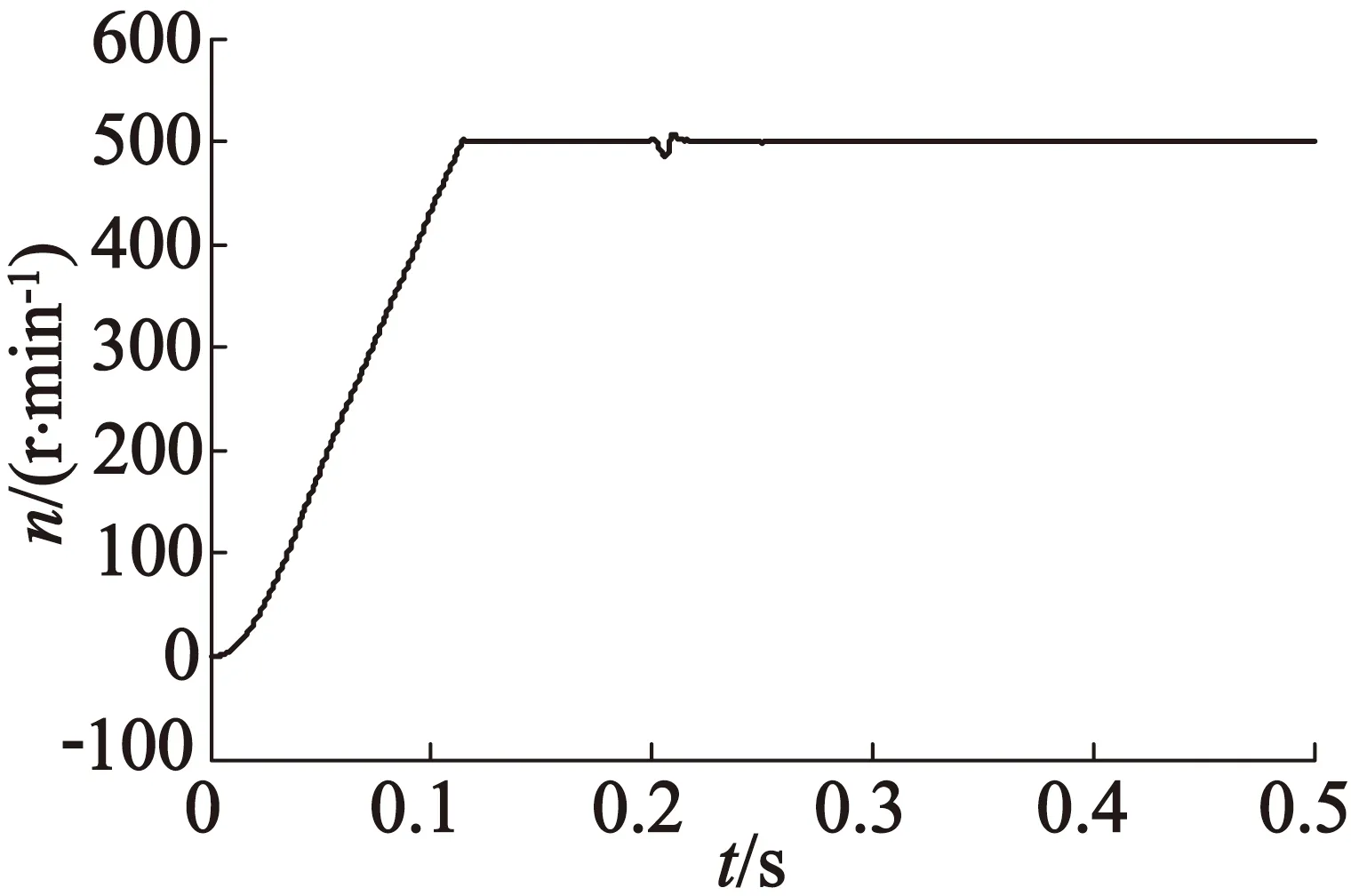
图6 单相绕组开路 转速变化波形

图7 单相绕相开路谐波 平面电流变化波形
图4为容错控制策略下的单相开路故障时定子电流变化过程,剩余有效相定子电流幅值不再相等,最大电流的幅值接近4.5 A,最小的电流幅值接近2 A,小于未加容错控制之前的电流幅值。
图5中单相绕组开路转矩脉动不到1.5 N·m,说明转矩脉动情况已得到较好的抑制,系统对于负载的抗干扰能力明显增强。当突加负载时,图6中的转速降落只有1.6 r/min,转速重新恢复给定值大约消耗0.01 s,转速脉动大大减小,系统的动态性能得到大幅改善。图7中的谐波平面电流幅值大约为1.6 A,小于未施加控制策略之前的电流幅值一倍左右。由电机在F相开路的仿真结果可知,本文的容错控制策略能够有效改善电机在开路时引起的电流畸变、转矩脉动、转速波动。
3.2两相绕组开路故障容错控制仿真结果及分析
当电机两相定子绕组开路时,相对于一相开路来说,电机结构更加不平衡,为了使本文的控制策略观察更加显著,设定仿真时间0.8 s,所缺两相定子绕组磁轴相互正交,仿真设定电机空载起动,在0.2 s时切换至两相定子绕组开路故障,在0.3 s时突加额定负载,然后在0.5 s时切换到相应的容错控制策略,电机的定子电流、电磁转矩,转速仿真结果如图8~图10所示。
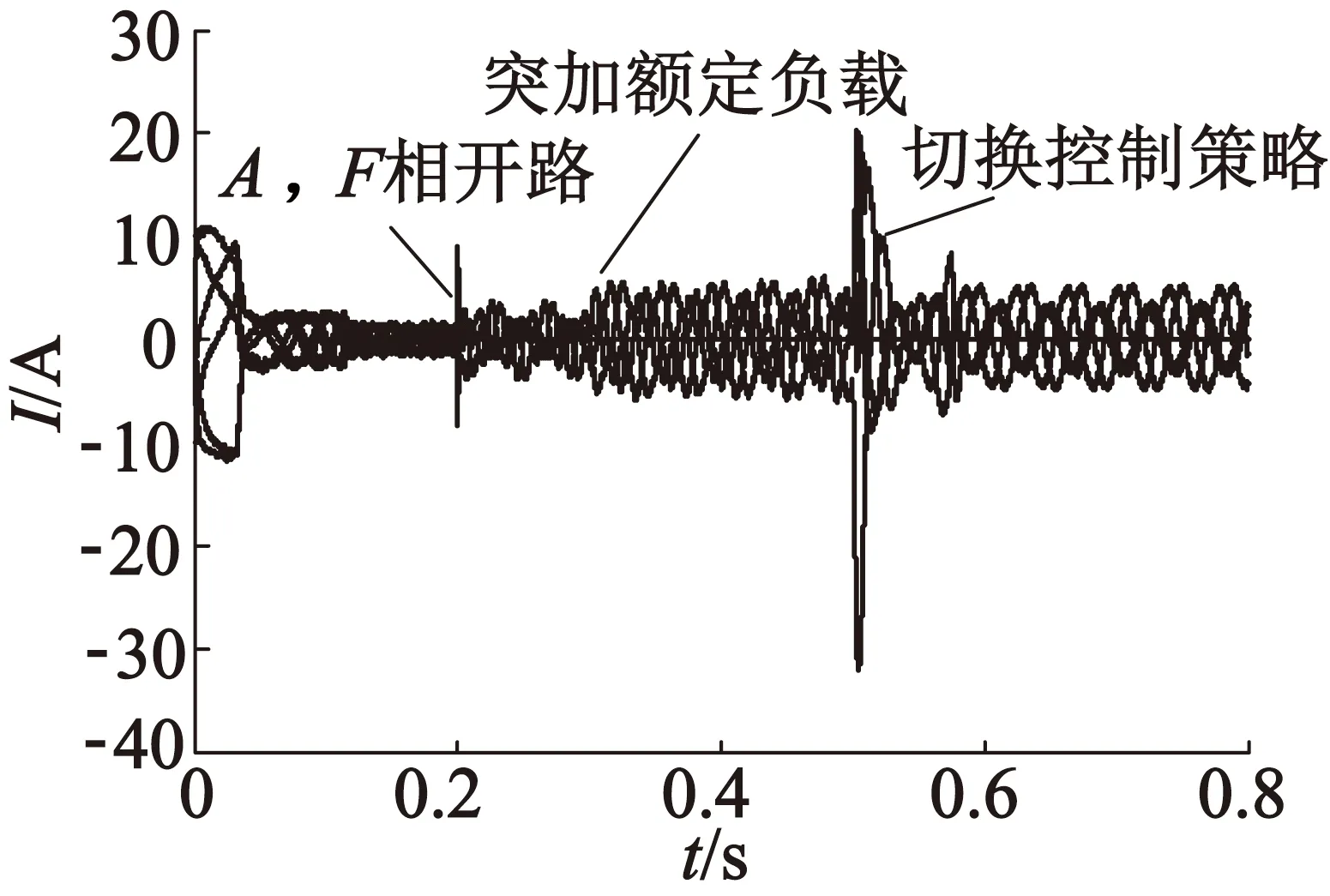
(a) 两相绕组开路定子电流变化波形

(b) 剩余有效相定子电流稳态局部放大图图8 两相定子绕组开路定子电流变化图
由图8(a)可见,电机在正常状态下运行良好,在0.2 s时两相绕组突然断相,电流波形开始畸变,处于完全非正弦状态;在0.3 s时加额定负载后,畸变情况甚于一相绕组开路的情况,说明此时电机不对称情况更加严重;在0.5 s时切换为容错控制策略,电流波形慢慢恢复正弦。由图8(b)电流局部放大图可见,当系统处于稳定状态后,定子电流正弦度良好,稳态时,剩余四相电流中,最大电流的幅值接近5.2 A,最小的电流幅值接近3.3 A,相对于一相绕组开路故障时电流幅值增大了,每一相承担的功率变大,说明了缺相后在输出功率不变的情况下,需要增大电流来维持转矩输出。
图9中,两相开路后,未加入控制策略之前转矩
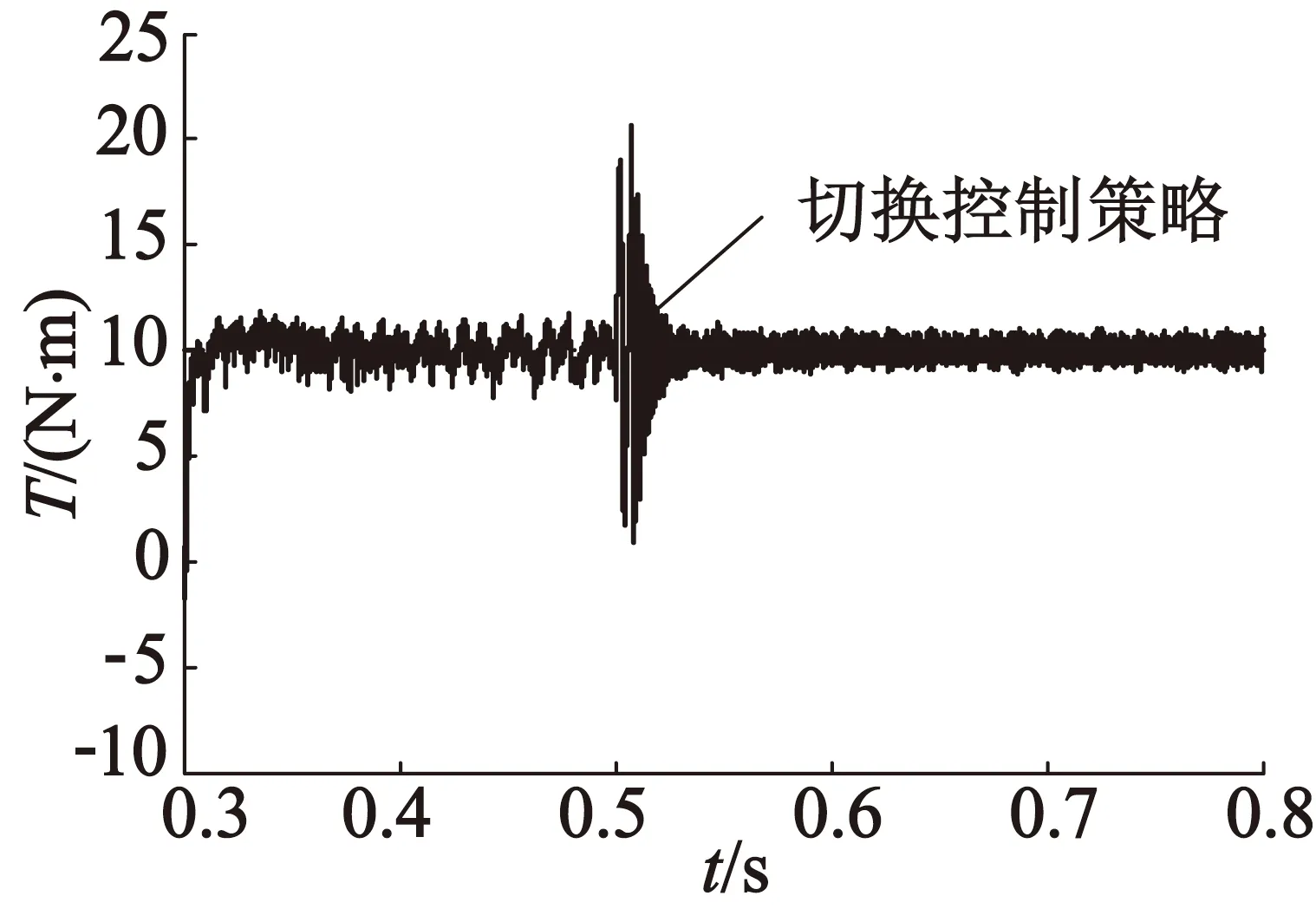
图9 两相定子绕组开路转矩变化波形

图10 两相绕组开路故障转速波形局部放大图
脉动大约为3.5 N·m,且处于脉动状态;切换至容错控制后的转矩平稳,且波动幅度不到1.6 N·m,说明控制策略较好地抑制了两相绕组开路后的转矩脉动。
从图10中可以明显看出,在0.3 s突加负载后,转速速降大约8 r/min,当恢复给定后开始出现脉动,在0.5 s切换控制策略后,转速迅速稳定在给定值,转速变得不再波动。三相绕组开路情况控制方式相同,下面将通过实验验证。
4 实验及结果分析
为了进一步验证本文的容错控制策略的有效性与正确性,在电动汽车用六相感应电机实验平台上进行实验验证。所用电机与仿真相同,主控制芯片为DSP28335,同时实验开关频率选择为10 kHz,采用经典采样自然脉宽调制(PWM)技术,由现场可编程门阵列(FPGA)产生。采用一款最大制动转矩为20 N·m的磁粉制动器作为电机测试负载,用四通道示波器对转速和电流波形进行采集。
实验条件为给定额定转速970 r/min,空载起动,直流侧给定电压140 V,待系统稳定后突加至额定负载,由于磁粉制动器加载的滞后性,本文给出了电机在三种不同开路状态下的定子电流和转速波形,如图11~图13所示。可以看出,实验波形和仿真波形完全一致。
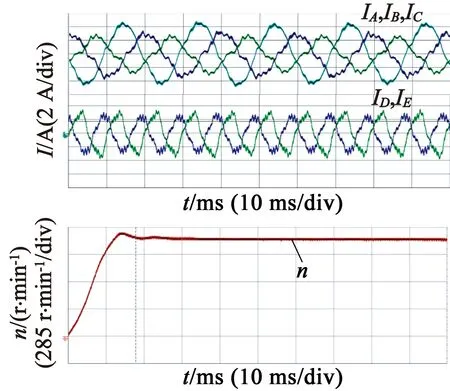
图11 一相定子绕组开路下电流和转速波形
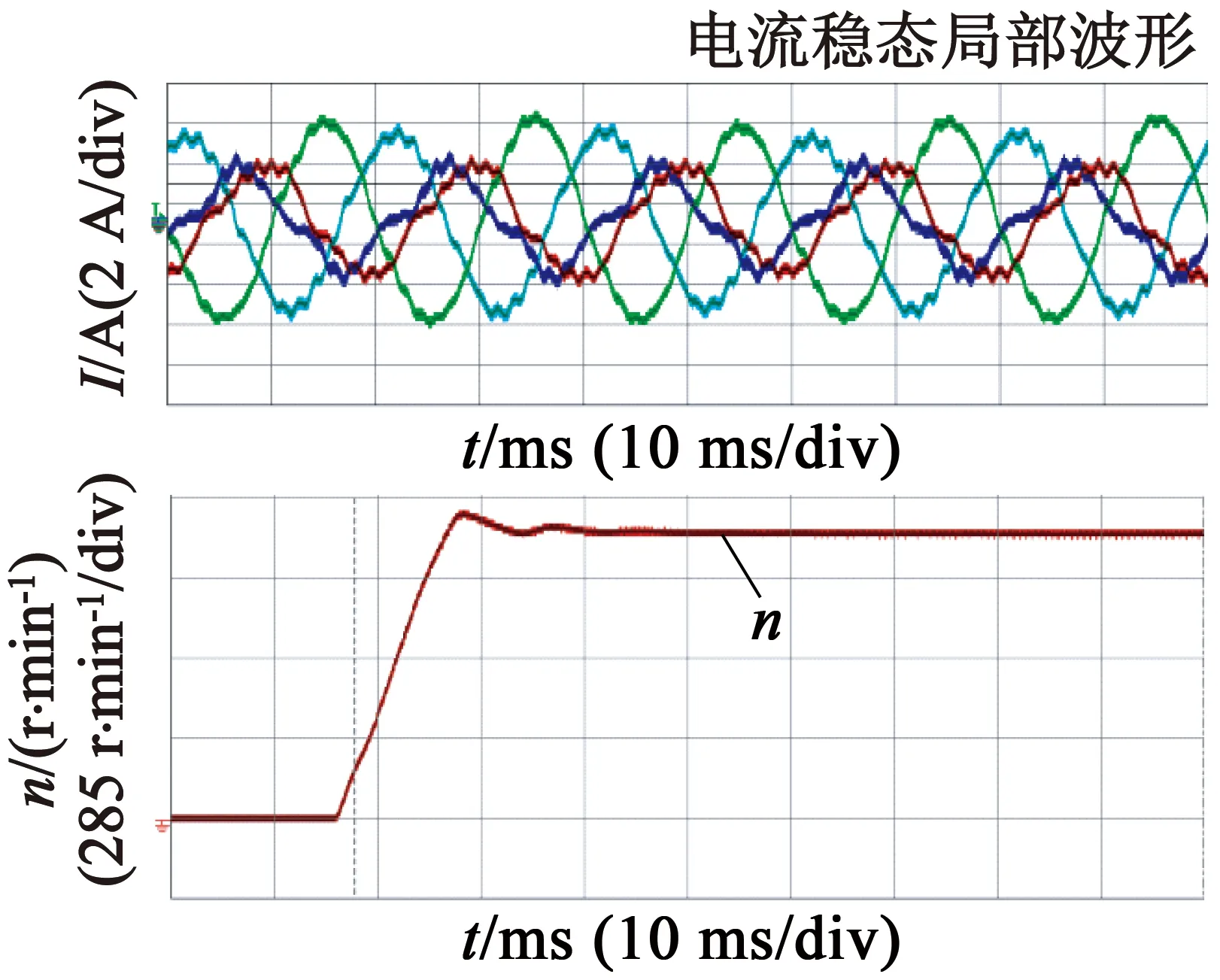
图12 两相定子绕组开路下剩余四相定子电流和转速波形
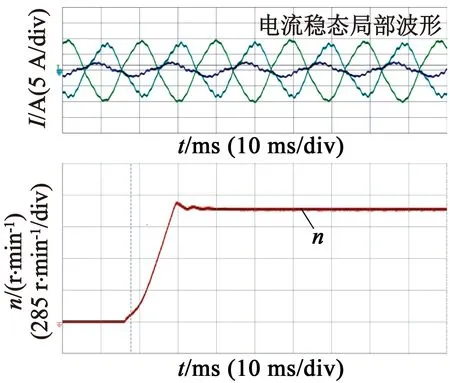
图13 三相定子绕组开路下剩余三相定子电流和转速波形
实验结果表明,本文的容错控制策略能够有效减小电机在开路故障下的转矩脉动和电流谐波,保证系统的稳定,提高了电动汽车用六相感应电机驱动系统的冗余能力和可靠性。
5 结 语
为了实现六相感应电机在定子绕组开路故障下的容错运行,本文推导了缺相故障下统一的数学模型,建立了定子绕组开路故障下的磁场定向控制,在谐波平面内引入了比例积分控制器,分别以单相、两相和三相定子绕组开路故障为例,在MATLAB/Simulink中进行了仿真研究,并且在车用六相感应电机实验平台上对电机的容错控制性能进行实验验证。仿真和实验结果表明,本文的容错控制策略能够有效实现车用六相感应电机发生开路故障后的稳态运行,减小缺相后转矩脉动和电流谐波,提高了电机运行的效率,满足了电动汽车运行工况的要求。
猜你喜欢
防爆电机(2022年4期)2022-08-17
防爆电机(2021年6期)2022-01-17
防爆电机(2021年3期)2021-07-21
建材发展导向(2021年7期)2021-07-16
防爆电机(2021年1期)2021-03-29
微特电机(2020年11期)2020-12-30
青年歌声(2019年2期)2019-02-21
电子制作(2017年1期)2017-05-17
电子制作(2017年23期)2017-02-02
四川党的建设(2014年10期)2014-08-23
