航海雷达目标快速识别方法研究
2020-01-15 06:20王海霞王庆名庞玺斌
无线电通信技术 2020年1期
王海霞,徐 进∗,王庆名,赵 阳,庞玺斌
(1.大连海事大学 航海学院,辽宁 大连 116026;2.大连海事大学 校友事务与合作处,辽宁 大连 116026 )
0 引言
航海雷达能够在恶劣天气和能见度不良的条件下,稳定获取海上目标和运动对象的方位角和距离,可实时感知周围环境信息,提供扫描范围内的动态障碍物信息和其他在电子海图上未能显示出的静态信息,对船舶安全航行发挥着十分重要的作用[1-2]。目前航海雷达的目标识别主要依赖于驾驶员的手动作业,受限于操作员的专业知识和航海识图经验,存在目标搜索和目标识别慢等问题。 对多目标的识别与跟踪研究已经成为航海雷达比较热门方向,有比较好的应用前景。
复杂背景下弱小目标的检测一直是图像处理领域的热点和难点[3-4],基于Prewitt 算子的自适应背景预测算法,更有利于弱小目标的实时检测[5]。 严杭晨等[6]提出了一种基于全方位视觉的多目标对象跟踪方法,采用面向对象的多目标对象跟踪算法来识别不同的目标,具有鲁棒性高、运算量小、便于硬件实现及高效等优点,但会消耗一些计算资源。
雷达目标边缘检测是雷达目标识别的基础,但快速准确检测是边缘特征提取的难点问题。 单阈值法提取的边缘信息存在断点、特征不准确等问题,采用双阈值法可以快速提取图像边缘信息并实时检测[7]。 徐进等[8]用改进的Prewitt 算子,对比RATS,OTSU 和MaxEnt 阈值分割方法对航海雷达图像进行降噪处理,效率较高,且能较为完善地保留图像的原始信息。 许乐灵等[9]研究发现根据图像边缘区域自适应地选择2 个阈值,二者有效结合可大幅提高边缘检测算法的准确度和运算效率。 胡笑莉等[10]利用OTSU 法和 Kittler 法互补计算出的2 个阈值,不仅保留了更多细节目标,也控制了算法的时间开销,针对光照不均图像的二值化问题,提出一种新的图像增强方法。
本文以大连海事大学校船“育鲲”轮执行科研航行任务时,采集的雷达原始图像为数据基础,在警戒区范围内,采用自动多级阈值与面积阈值的双阈值法,提取对本船航行安全可能产生影响的目标,实现雷达目标的快速识别,为船舶海上航行提供安全保障。
1 雷达目标快速识别方法
1.1 数据来源及设备参数
本文选择X 波段船载雷达信号采集得到的原始灰度图像(设备参数,如表1 所示),图像中信号监测范围为0. 75 海里,图像大小为1 024 像素×1 024 像素(如图1 所示)。 监测数据采集地点:大连沿海,位置如图2 所示。 船载平台:大连海事大学“育鲲”轮号(如图3 所示),采集时间:2015 年8 月11 日10 时14 分59 秒。 这份数据中含有大量的含杂波信息,用于反演海面海浪、风速、风向等信息的研究。
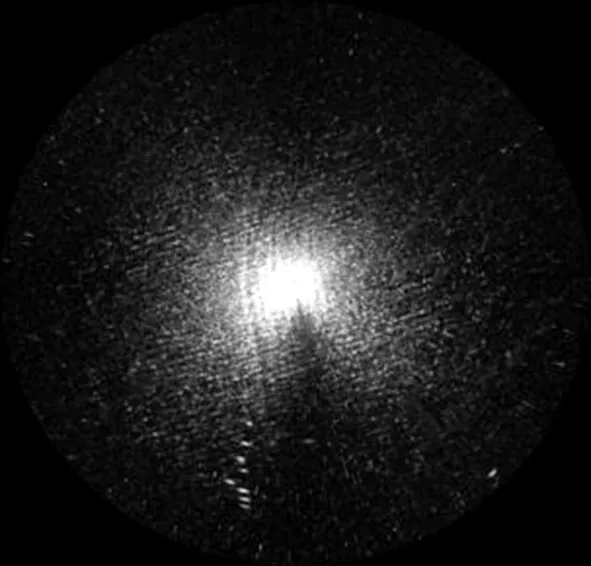
图1 雷达图像原图Fig.1 original radar image
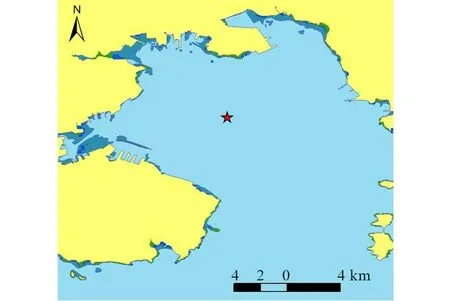
图2 数据采集点Fig.2 Data acquisition position
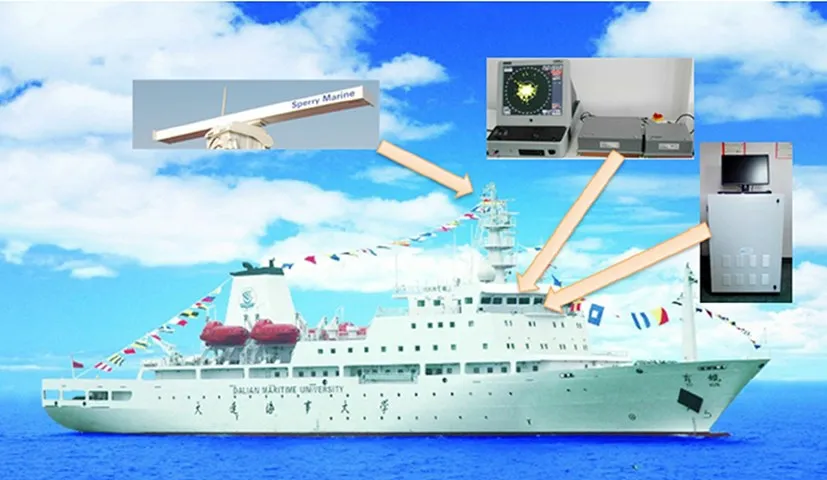
图3 船载雷达溢油监测系统(育鲲轮)Fig.3 Installation of marine radar oil spill monitoring system on the Yukun
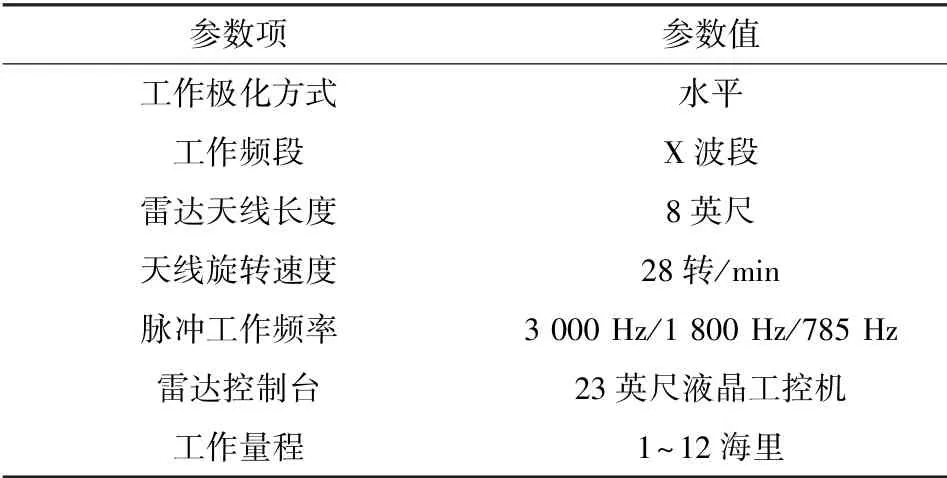
表1 育鲲轮航海雷达设备参数Tab.1 Parameters of the marine radar installed on the Yukun
1.2 数据预处理
1.2.1 坐标系统变换
实验数据的坐标系统是现实世界中船载设备常用的极坐标系统。 但是,数据采集的原始坐标系统是信号抽象世界的平面直角坐标系统。 为了从数据源头进行解译分析,应先将数据投影回平面坐标系下。 极坐标以距离和方位角(P,θ)表示目标位置,而直角坐标以(x,y)表示,采用式(1)进行相互转换,其中θ 为与正北方向的夹角[11]。

1.2.2 Prewitt 算子
雷达信号夹带很多的干扰噪声,包括斑点噪声和同频干扰,在识别雷达目标之前对雷达图像进行预处理显得尤为必要[12]。 现有Prewitt 相关算法存在边缘识别率低、准确性差、阈值设定随机性大等问题,为此提出一种自适应阈值的Prewitt 图像边缘检测算法。
Prewitt 算子是一阶微分算子,它利用像素点领域的灰度差峰值,检测目标边缘[13]。 其原理是利用方向特性窗口与目标图像进行卷积来完成的,主要包含水平特征窗口与垂直特征窗口。 对数字图像f(x,y),Prewitt 算子的定义如下:
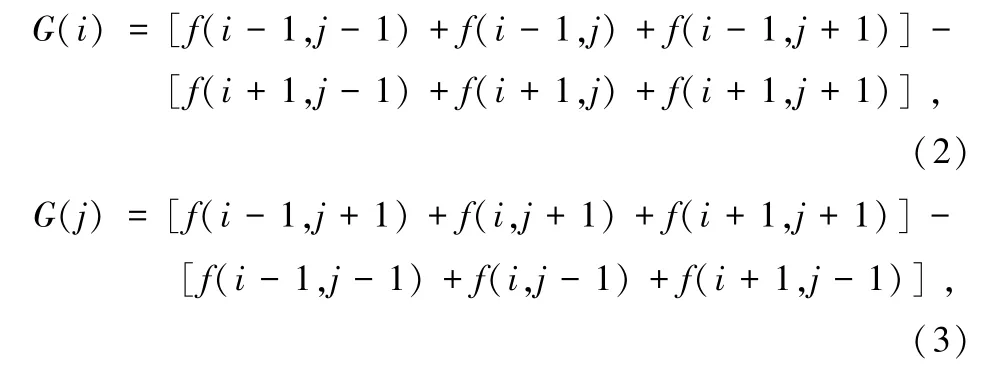
式中,G(i)为垂直特征窗口算子,多用于检测水平边缘,G(j)为水平特征窗口算子,多用于检测垂直边缘,i,j 分别为图像矩阵的行列数。
由于同频干扰在平面直角坐标系中,表现为Y 轴垂直方向的高亮噪声,因此本文将Prewitt 算子进行改进,且只利用垂直特征检测窗口,公式如下:
改进Prewitt 算法计算量小,获取的边缘线条细节更加完整清晰。
1.2.3 鲁棒自动阈值法
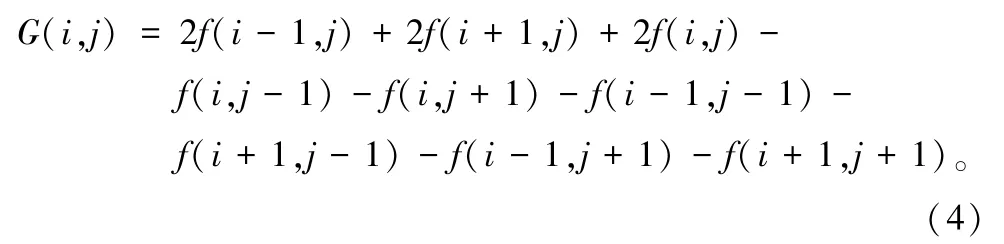
RATS 是一种灰度图像二值化阈值分割方法[14]。 在噪声存在的情况下,分割阈值T 偏向于图像中最大类。 噪声的偏移可以通过一个低于没有经过加权的灰度边缘强度阈值来消除。 这时,阈值T演变为如下公式:
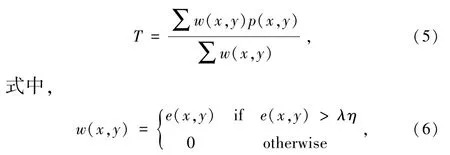
式中,η 为噪声的标准偏差,λ 为实际使用的边缘强度阈值的矫正参数。 针对式(6)中定义的边缘强度,Wilkinson[15]在1998 年的实际实验中,认为高斯噪声图像中的λ=5 最适合。 结果表明,针对原点处边缘的均匀响应,任何边缘检测器在任意维度上都会产生相同的最优阈值T。 特别是在梯度仪检测器中:

式中,gx,gy,gz 没有曲率偏差和旋转变化。 除此之外,Kahmoun[16]在1994 年提到,梯度检测器可以减少噪声偏差。 然而,减少噪声偏置是以增加方差为代价的。 这个方差可以利用Sobel 滤波器内核计算得到的x,y,z 的导数来控制。
1.2.4 线性内插
由于同频干扰在平面坐标系图像中,呈现出纵向特性[17]。 所以,在处理噪声点时,选取其横轴方向上邻近的2 个非噪声像素点,按照距离进行加权插值,如下:

式中,m,n 分别表示目标点左、右侧的噪声点总数。
同频干扰是雷达在天线接收端方向上造成的噪声,在雷达图像上代表方位角方向的信号噪声。 在抑制这种噪声时,应当在以方位角为横轴方向,以量程回波信号为纵轴方向的平面坐标系统中进行降噪处理。 由于横向卷积处理后的同频干扰噪声信号强度被削弱,而其他像元的信号强度变化并不明显,因此,原图像与卷积处理后的图像,会在同频干扰处存在较大差异。 接下来,再应用自动多级阈值法,进行图像的二值化分类。 其中,同频干扰和噪声为“1”,其他像元为“0”,。 再采用横向滤波器,对同频干扰信号进行线性内插处理[18],如图4 所示。
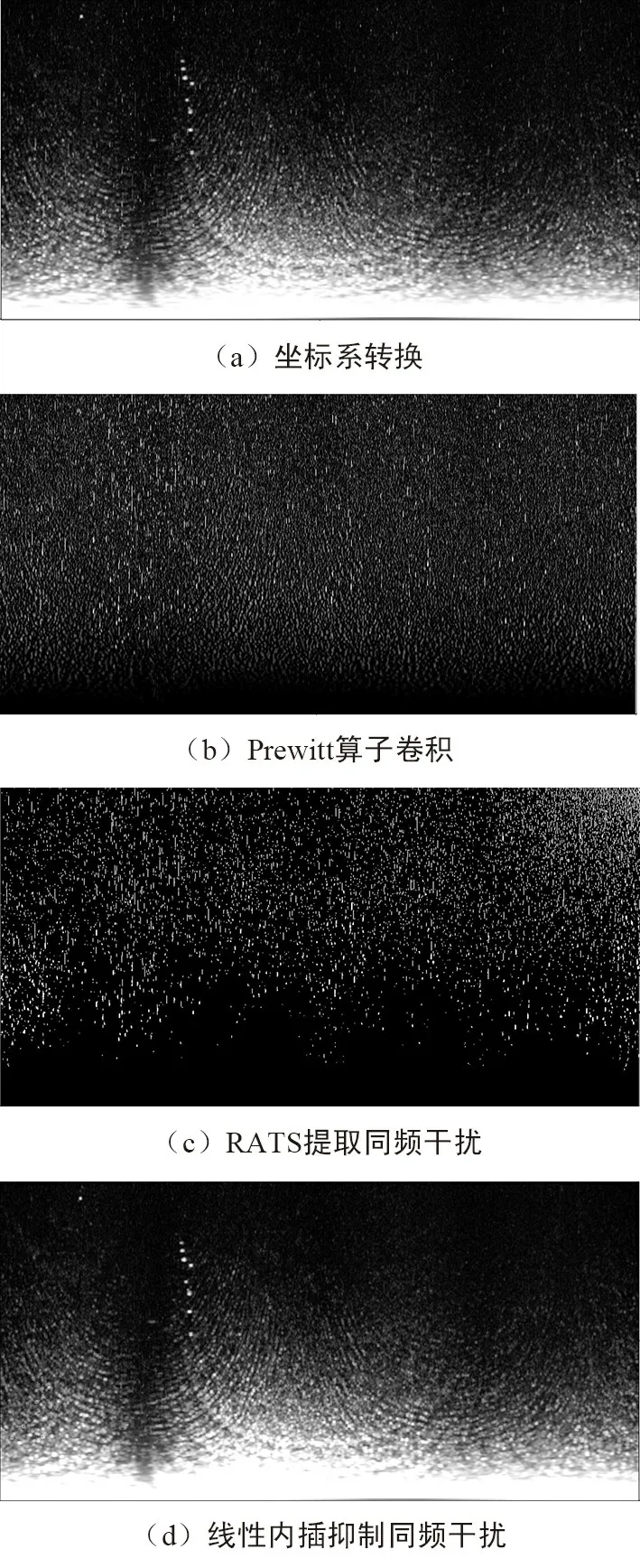
图4 图像预处理Fig.4 Result of data preprocessing
2 识别过程与结果
2.1 锁定目标范围
“警戒区”即为根据主管机关在充分考虑该水域的通航环境、通常情况下的通航秩序及该水域历史上发生的险情、事故情况进行综合分析的基础上给所有航经该水域的船舶采取警戒行为的区域[19]。警戒区会比其他区域更加可能会发生碰撞危险事故,所以船舶在该水域航行的过程中,应当加强对某类碰撞危险的针对性瞭望,选择当下本船最佳航速、航向来避免碰撞事故的发生。 利用灰度分布动态曲线,根据本船目前警戒区范围,识别出目前对本船有航行威胁的目标,如图5 所示。
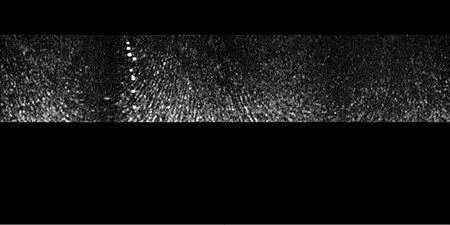
图5 设定警戒区Fig.5 Set warning zone
2.2 自动多级阈值法
随着分类数量的增加,阈值图像变得更加类似于原始图像[20]。 原始图像与阈值图像之间的差异随着分类数量的增加而减少,但是表示阈值图像所需的总位数随着类数的增加而增加。 因此,这2 个因素之间必须存在妥协。
设k 表示分类数量,Dis(k)表示阈值和原始图像之间的差异。 考虑这2 个因素的成本函数C(k)公式被提议为:

式中,ρ 是一个正的权重常数,C(k)的第1 项测量阈值图像和原始图像之间的差异所导致的成本,第2 项测量由用于表示阈值图像的位数所导致的成本。 差异的平方根Dis(k)与随机变量的“标准偏差”具有相似的含义。 采用平方位使用惩罚有两个原因:首先是使用“中间值定理”证明C(k)可以拥有唯一的最小值;第2 个是通过(Dis(k))来避免这个词的控制。 为了达到CdDis(k)和Cb(log2(k))之间的最佳折衷,C(k)必须最小化。 基于成本函数C(k),提出自动阈值准则(ATC)以确定最优分类数量k∗公式如下:

k:灰度被分类的分类号码;
Sk,i:当灰度级被分为k 类时的第i 个非零阈值;
Ck,i:第i 类具有从Sk,i-1到(Sk,i-1)的灰度级;
ωk,i:Ck,i的概率;
Pk,i:在由ωk,i归一化后由Ck,i导出的分布;
μk,i:Pk,i的平均数;
因此,对于给定的分布P≡{pi|i∈Gm},可以得到以下关系:
式中,GSk,i≡{Sk,i-1,Sk,i-1+1,…,(Sk,i-1)}在每个类中,所有的灰度级都被指定为该类灰度级的平均值。 差异Dis(k)公式为:
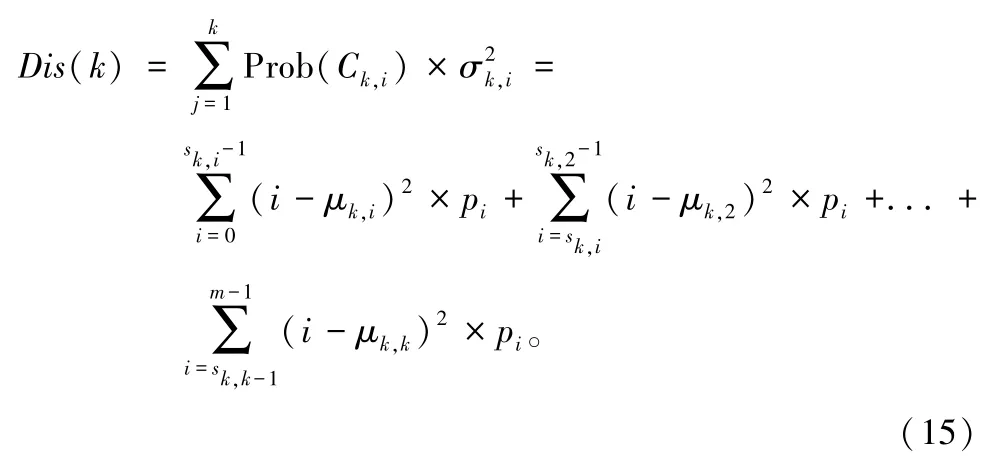
从Pk,i中选择具有最大方差的分布并应用最大相关标准(Maximum Correlation Criterion,MCC),该选择分布可以进一步分成2 个分布。 因此,原始分布p 可以在归一化之后被分割成k+1 个分布,并且原始图像的灰度也被分成k+1 个类别。 重新标记式(9)~式(14)的所有阈值和k+1 级版本。 因此,可以相应地定义差异Dis(k+1)。
直观地看,随着分类数量的增加,阈值图像变得更加类似于原始图像。 因此,当分类数量增加时,差异应该减小。 现在,定义的Dis(k)将在下面被证明具有这种适当性。
此外,如果假设Dis(k)的形式为a×k-λ,那么可以得到关于C(k)的下列命题。
命题2:如果Dis(k)=a×k-λ,a>0,λ>0 且ρ<4×ln256×256λ/2/(λa1/2(ln2)2),则Dis(k) 对于kϵ[1,256]具有唯一的最小值。
从命题2 中可以看出,当Dis(k)开始增加时,可以确定最小成本,而不是在全球范围内进行搜索。 这意味着式(10)中的搜索过程可以终止并且ATC 的计算复杂度可以进一步降低。 自动多级阈值分割效果如图6 所示。
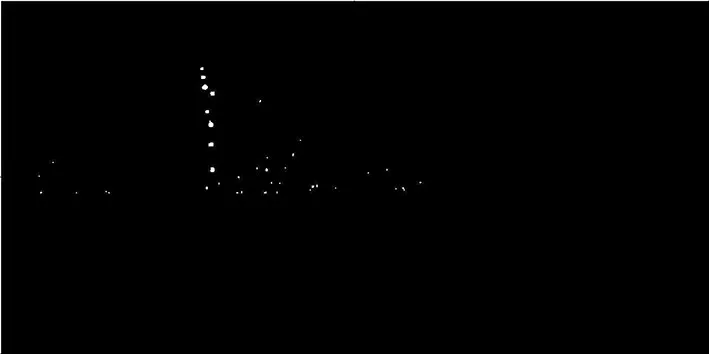
图6 自动多级阈值法Fig.6 Automatic multi-level threshold method
2.3 面积阈值法
通过面积阈值法对第1 次图像分割后的图像进行目标提取,根据船舶的面积范围设定一个最佳阈值,将低于此阈值的噪声目标进行剔除,如图7所示。
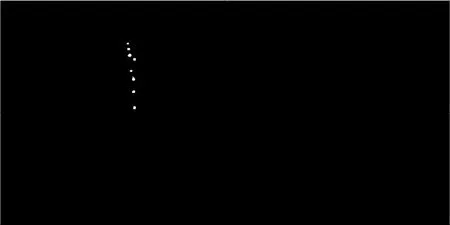
图7 面积阈值法Fig.7 Area threshold method
2.4 目标提取
最后,将降噪后的图像,从平面坐标系转换到极坐标系统下,其转换公式如下:
将图像上识别出来的已经剔除后的目标进行标红显示,以便进行下一步提取目标,如图8 所示。
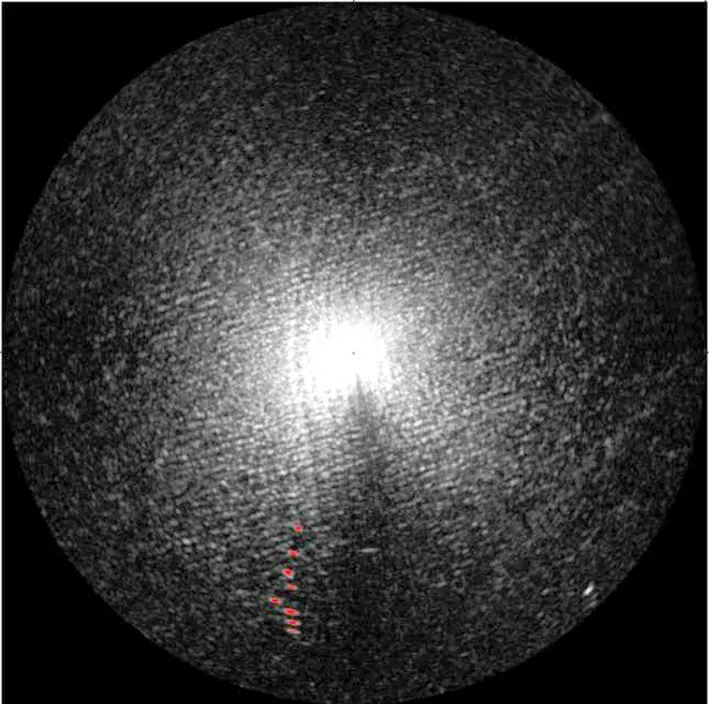
图8 目标识别结果Fig.8 Result of target recognition
2.5 雷达目标与电子海图融合
① 根据船首向角度,将雷达图像进行旋转,使雷达图像的0 点方向指向正北方向,如图9 所示。
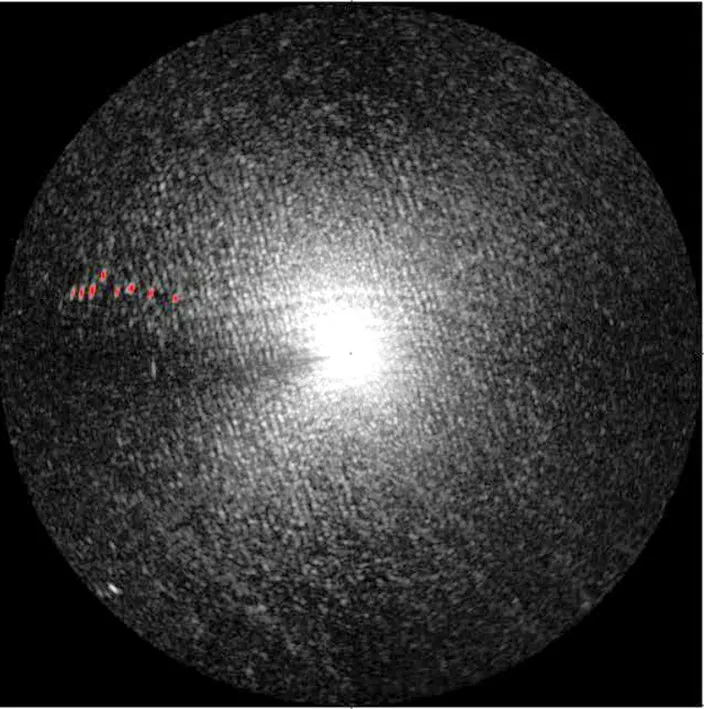
图9 雷达图像真北方向校正Fig.9 True north direction correction of radar image
② 提取所有识别目标的轮廓,并记录每个目标的边界点图像坐标,如图10 所示。
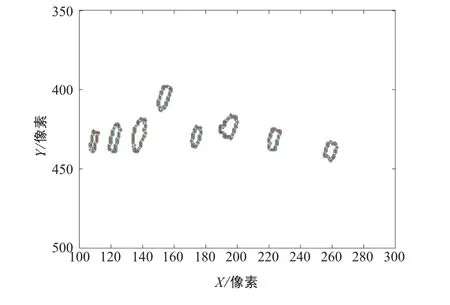
图10 目标轮廓提取Fig.10 Target contour extraction
③ 根据船舶的GPS 信息,依据WGS1984 地理坐标系统到Beijing1954 平面坐标系统(大连港附近海域处于6°带划分的21 带中)的空间投影方法,将船舶的经纬度坐标变换为平面直角坐标系,单位变换为m。 (121.741 812°,38.943 339°)变换为(390 917.14 m,4 313 042.96 m)
④ 由于当前数据的量程为0.75 海里,且图像半径为512 像素,从而计算出每个像素点的空间分辨率为2.71 m。 根据每个目标的边界点图像坐标与船舶所在中心点的图像坐标,以及每个像素的空间分辨率,计算出每个边界点的在Beijing1954 平面坐标系统下的平面坐标。 最后,将每个边界点的平面坐标从Beijing1954 平面坐标系统反投影回WGS1984 地理坐标系统中,变换为经纬度坐标。
⑤ 利用地理信息系统中的空间对象生成技术与每个目标的所有边界点地理坐标,在电子海图中生成识别的目标多边形,如图11 所示。
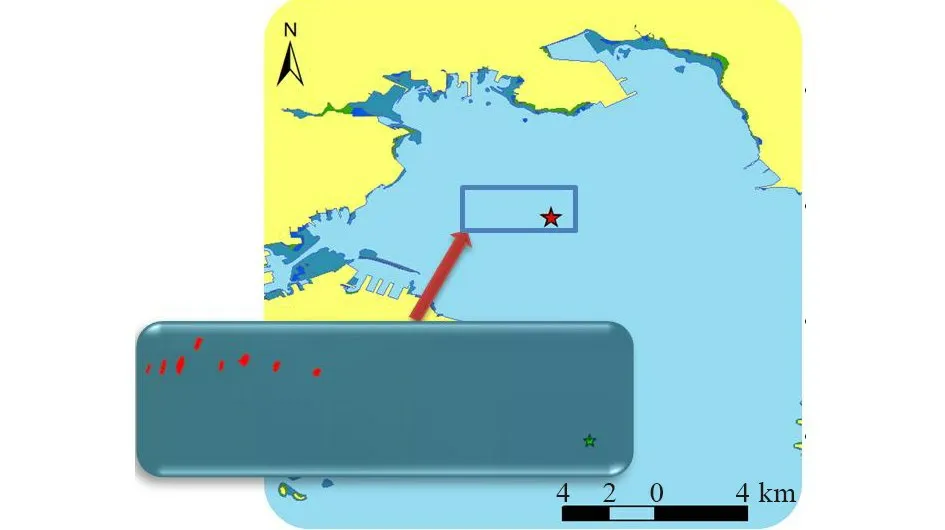
图11 数据融合结果Fig.11 Result of data Fusion
3 结束语
本文以大连海事大学校船“育鲲”轮航行过程采集的雷达图像为数据基础,提出一种基于多级阈值与面积阈值的双阈值法的雷达目标快速识别方法。 研究结果表明:
① 改进后的Prewitt 算子进行图像卷积运算可以实现边缘检测,RATS 自动阈值法在提取同频干扰时能够消除边缘细小噪声,而线性内插的方式加权求均值,抑制同频干扰,运算简单,需要采取的像素点少;
② 多级阈值与面积阈值的双阈值法,能够将不影响本船航行小面积的目标剔除,只保留船舶或其他较大面积影响船舶航行安全的目标;
③ 提取后的目标与电子海图融合,在电子海图上面显示本船附近在警戒区内可能会对船舶航行安全造成影响的目标,为驾驶员提供更加全面可靠的信息。
猜你喜欢
云南大学学报(自然科学版)(2022年1期)2022-02-21
建材发展导向(2021年19期)2021-12-06
临床骨科杂志(2020年1期)2020-12-12
校园英语·上旬(2020年1期)2020-05-09
卷宗(2017年16期)2017-08-30
通信产业报(2016年44期)2017-03-13
科技视界(2014年25期)2014-04-27
雕塑(1999年2期)1999-06-28
雕塑(1996年2期)1996-07-13