基于RBF终端滑模观测器的电机转子位置估计
2020-01-14 06:03刘慧博江帅璐
计算机应用与软件 2020年1期
刘慧博 江帅璐
(内蒙古科技大学 内蒙古 包头 014010)
0 引 言
无刷直流电机因其体积小、重量轻、效率高、运行可靠等优点在各个领域都被普遍采用。尤其是在一些特殊的工作环境下,位置传感器的安装会带来诸多问题,因此无位置传感器控制技术被越来越多地应用于实际生产工作中。
传统无位置传感器估计方法有反电动势法、电感法、续流二极管法、观测器等,其中滑模观测器因对系统数学模型的精确度要求低且具有良好鲁棒性,已成为目前研究的热点。但是在实际系统中,滑模观测器会由于其控制作用的不连续性而产生抖振现象,不能消除,只能削弱。
文献[4]采用sigmoid连续函数来代替切换函数,有效抑制了抖振,但同时也降低了系统的鲁棒性和反应速度。文献[5]利用趋近律的概念,提出一种变结构控制系统的抖振消除方法,通过调整趋近律参数保证滑动模态的动态品质,减弱高频抖动,但参数的值需要精准控制,否则也会导致抖振。采用滤波器对控制信号进行平滑滤波,也是抑制抖振的有效方法,文献[8-9]采用低通滤波器,获得了平滑的控制信号,有效抑制了抖振,但是这种方法的难度在于加入滤波器之后的稳定性分析。文献[10-11]设计了滑模观测器来估计反电势,省去了低通滤波器和相位补偿环节,但估算的反电势因为抖振和噪声的影响仍然是不准确的。
本文采用无位置传感器控制方法,在传统滑模观测器的基础上,为抑制抖振现象,引入了终端滑模面,提出了基于自适应RBF神经网络终端滑模观测器的转子位置估计方法,结合RBF神经网络控制与终端滑模控制的优点,不仅优化了控制信号,还削弱了一般滑模控制的抖振现象,提高了转子位置与速度的估算精度,满足无刷直流电机的工作要求。
1 无刷直流电机数学模型
三相无刷直流电动机相电压的平衡方程为:
(1)
式中:Ua、Ub、Uc为定子各相的端电压(V);Ra、Rb、Rc为定子各相绕组电阻(Ω);L=Ls-M,L为定子电感,Ls为每相绕组自感,M为相间绕组互感;ia、ib、ic为定子各相电流(A);ea、eb、ec为定子各相反电动势(V)。
基于电机线反电势的电压方程为:
(2)
式中:iab、ibc为两相定子电流之差;eab、ebc为电机的线反电势;uab、ubc为电机的线电压。电机的线电压状态方程为:
(3)
利用线反电势过零点获取电机转子位置时,由于电流微分项的存在,会导致线反电势的计算误差,所以本文设计了滑模观测器对线反电势进行估计,提高估计精度。
2 观测器设计
2.1 终端滑模观测器
采用滑模观测器进行转子位置估计的控制框图如图1所示,通过定子电流和线电压来估计电机的转子位置和速度。
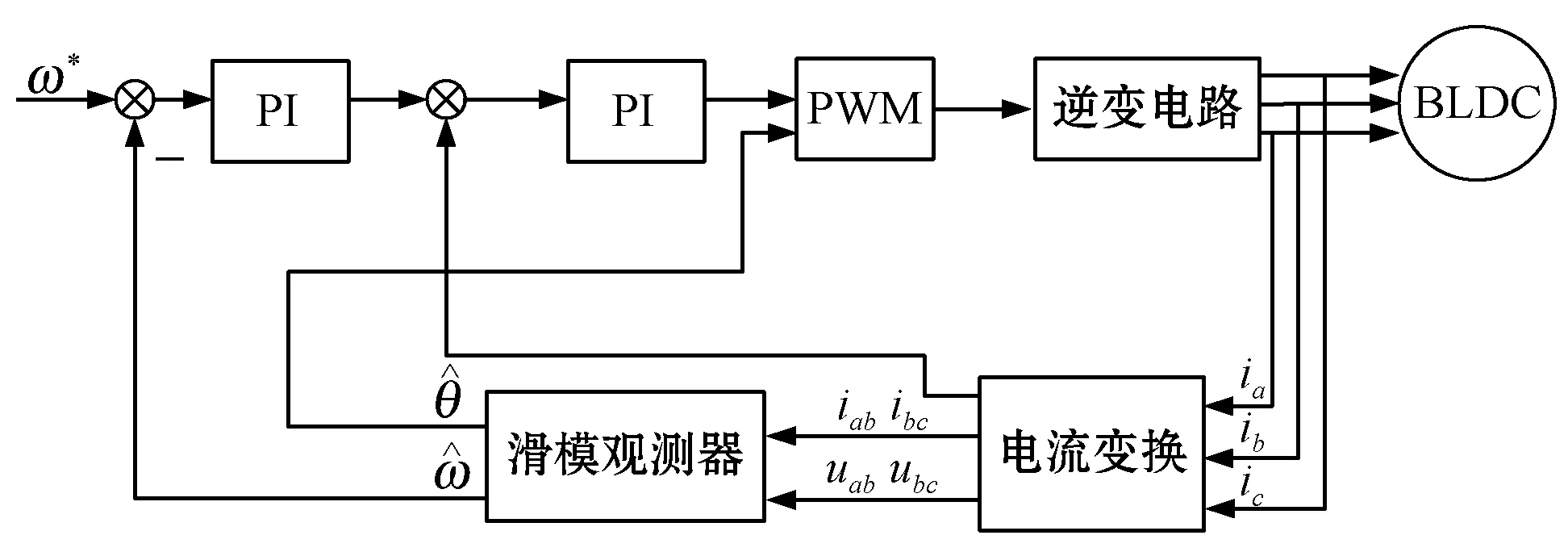
图1 采用滑模观测器电机控制系统框图
构建终端滑模观测器为:
(4)
与式(3)相减得误差方程:
(5)
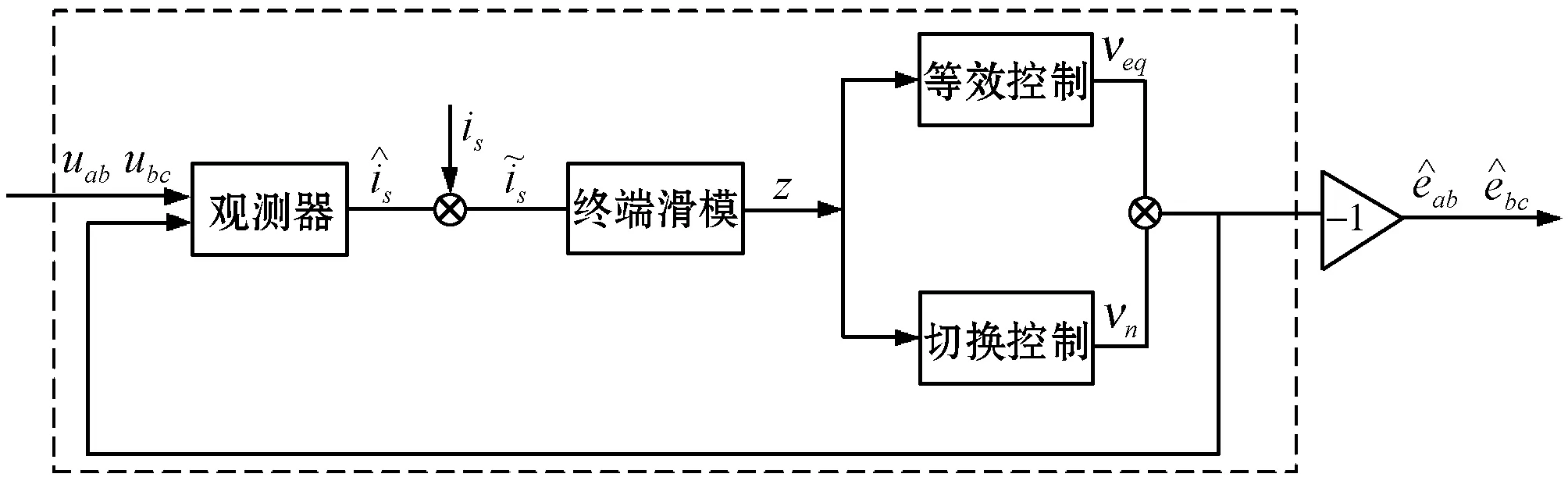
图2 终端滑模观测器结构图

选取终端滑模函数z来实现s的二阶滑模控制:
(6)

2.2 RBF神经网络设计
本文主要的创新点为等效控制νeq是通过RBF神经网络得到,并且将滑模变量作为神经网络的输入,其输出即为观测器的控制策略,将控制目标从跟踪误差转为滑模函数。整体结构如图3所示。
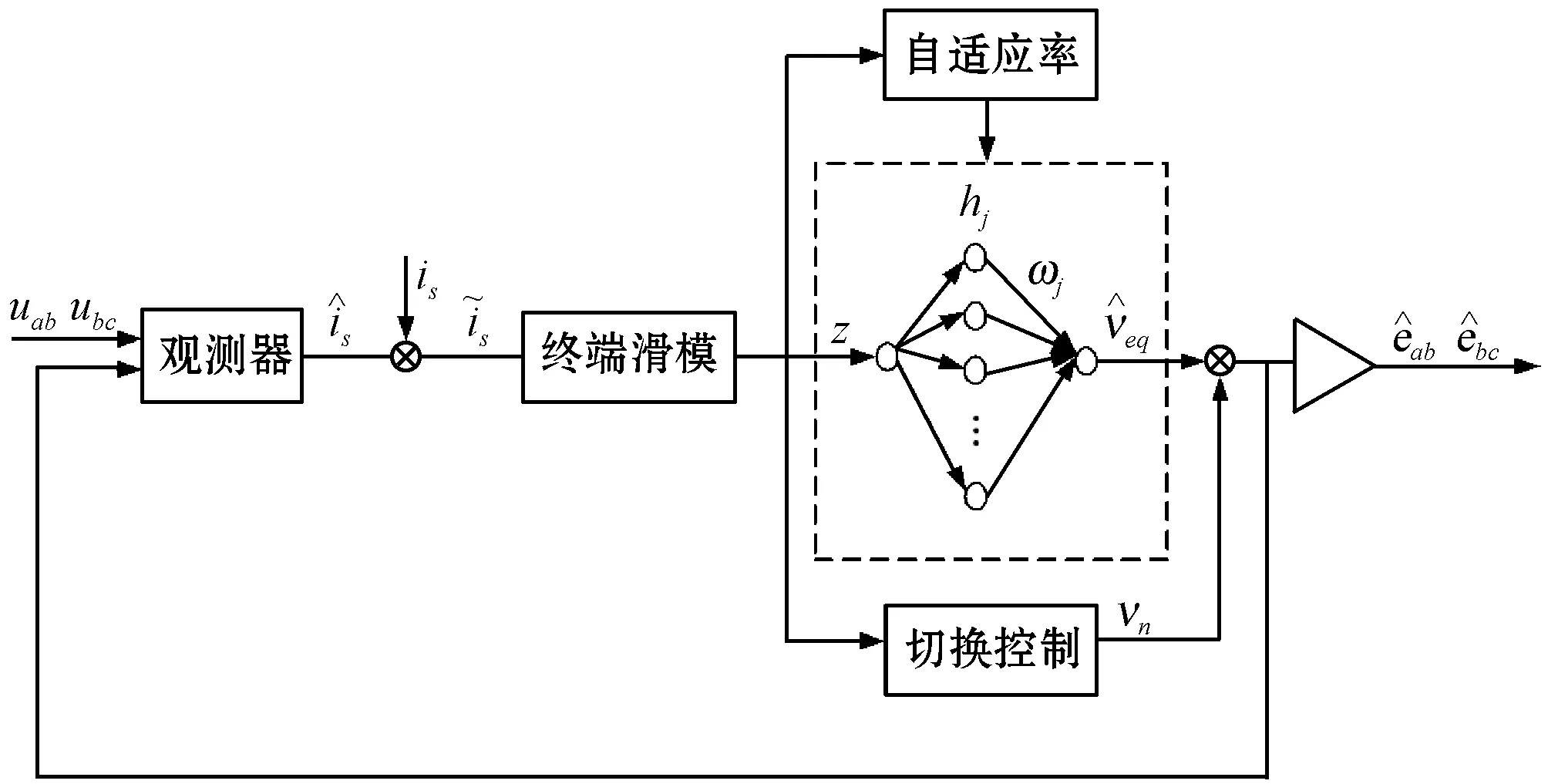
图3 RBF终端滑模观测器结构框图
(7)




(8)

选取RBF网络的学习指标:
(9)

则自适应率为:
(10)
式中:η>0为学习速率;ρ=-ηγ(q/p)sq/p-1。
3 仿真分析
在MATLAB/Siulink中建立仿真模型并进行仿真对比,电机参数和观测器参数如表1所示。
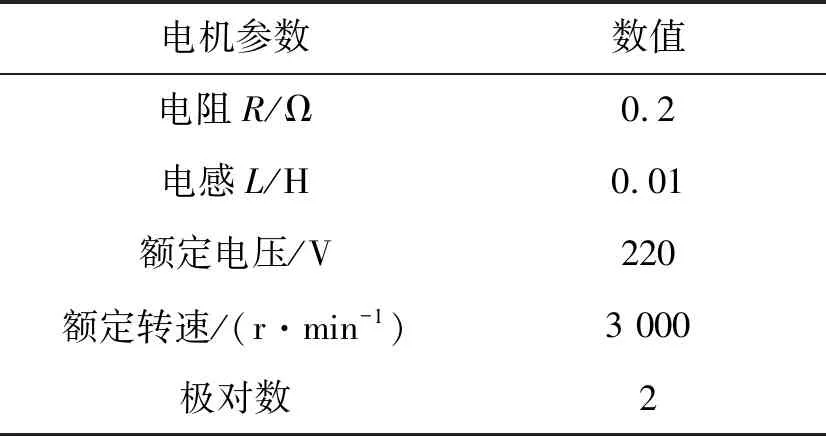
表1 电机参数
观测器设计参数:
γ=diag(0.001,0.001),q=7,p=9,Rs=2.875,神经网络初始权值为随机值,网络结构2-5-2。高斯函数参数取j=5,aj=[-3,-1.5,0,1.5,3;-1.5,0,1.5,3]T,bj=[1,1,1,1,1]T,η=1.5。
仿真结果如图4-图8所示。
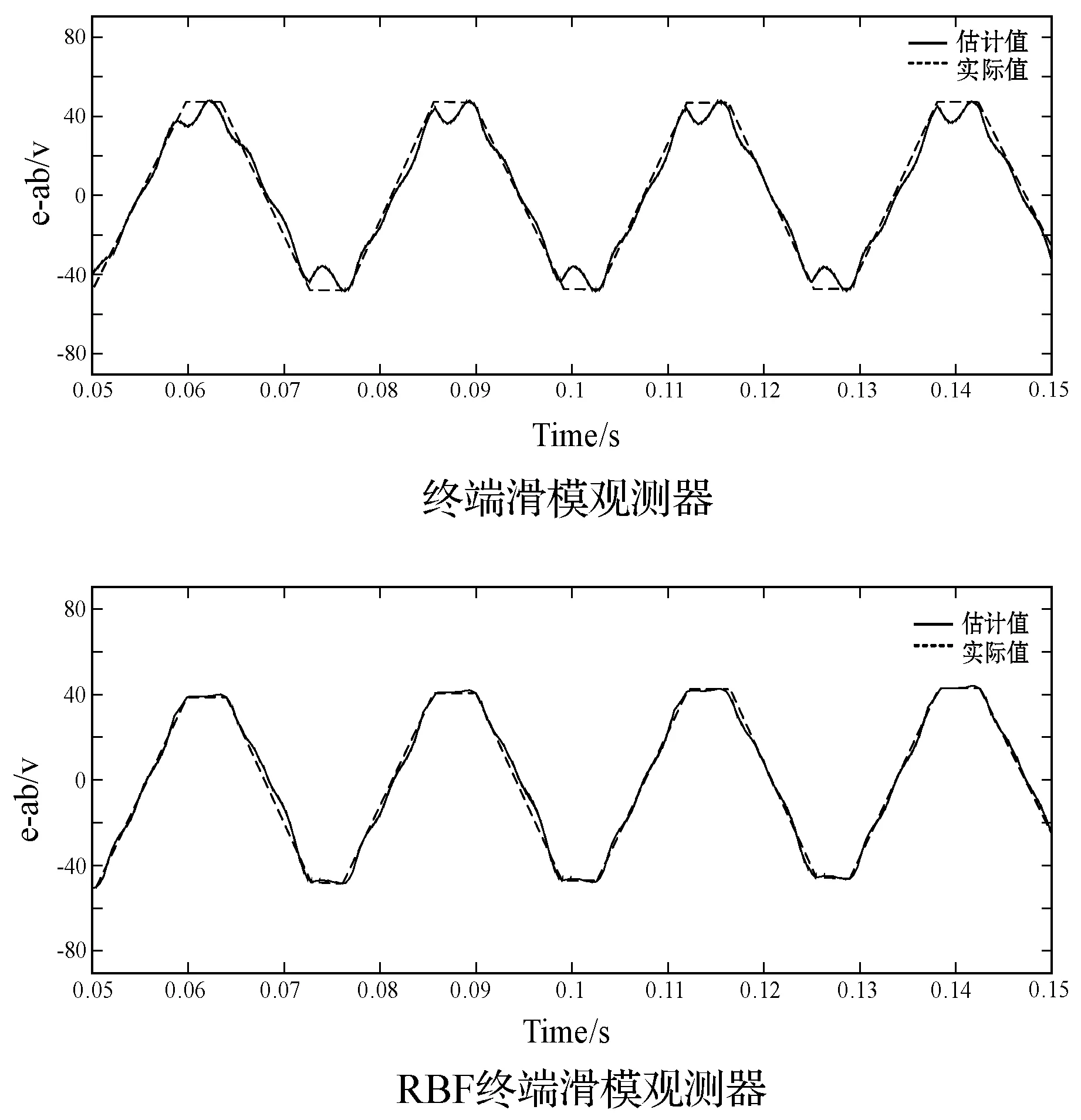
(a) 转速为600 r/min
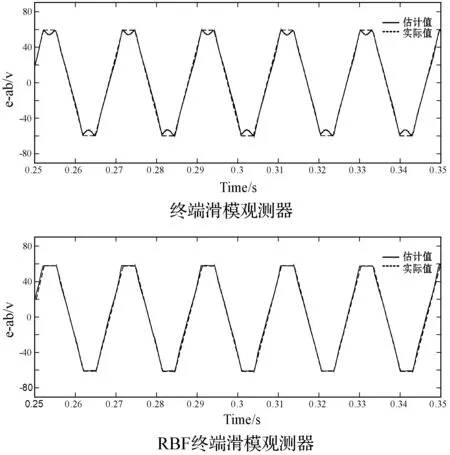
(b) 转速为800 r/min

(c) 转速为1 000 r/min
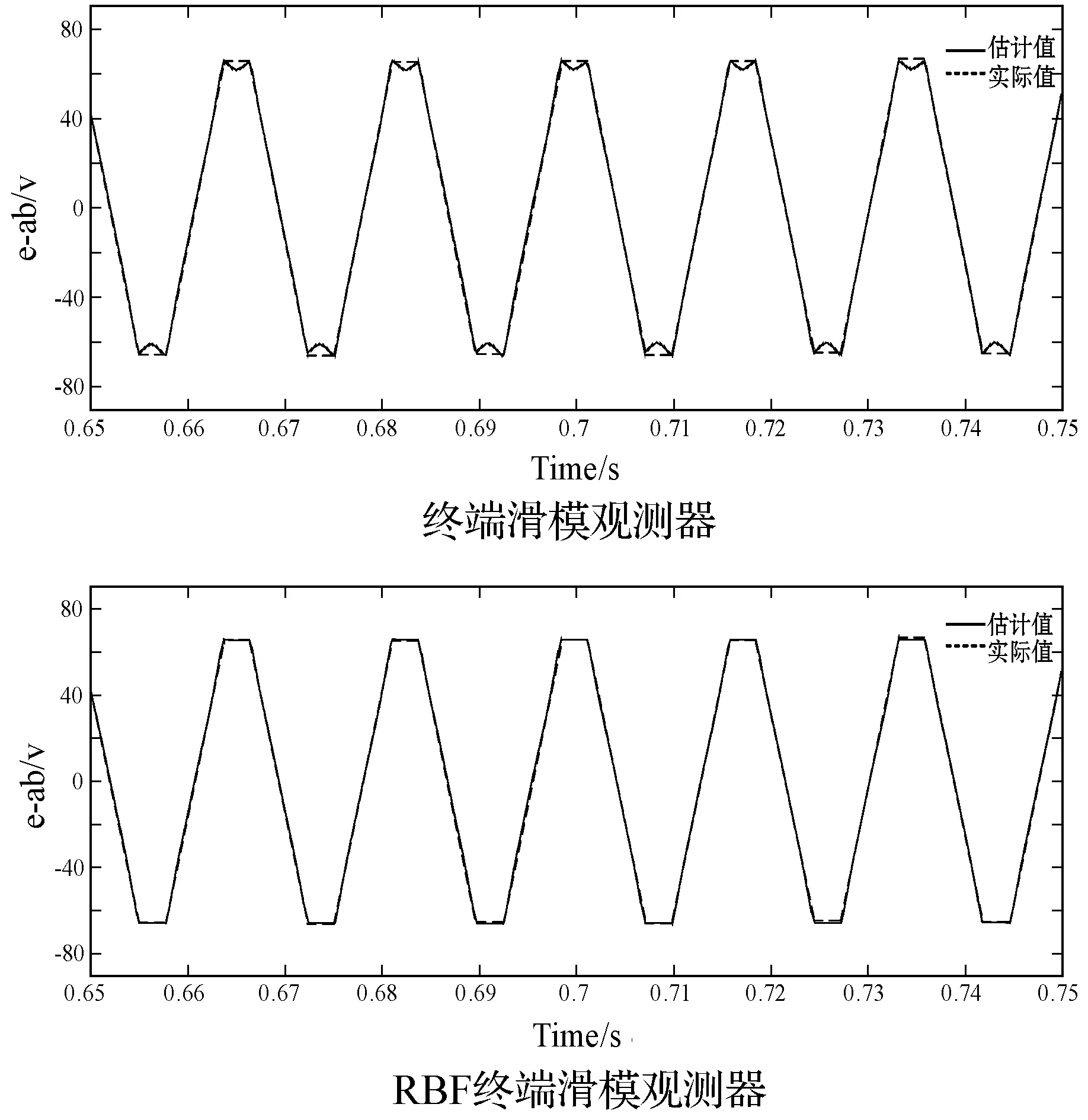
(d) 转速为900r/min图4 不同转速下反电势eab的估计值
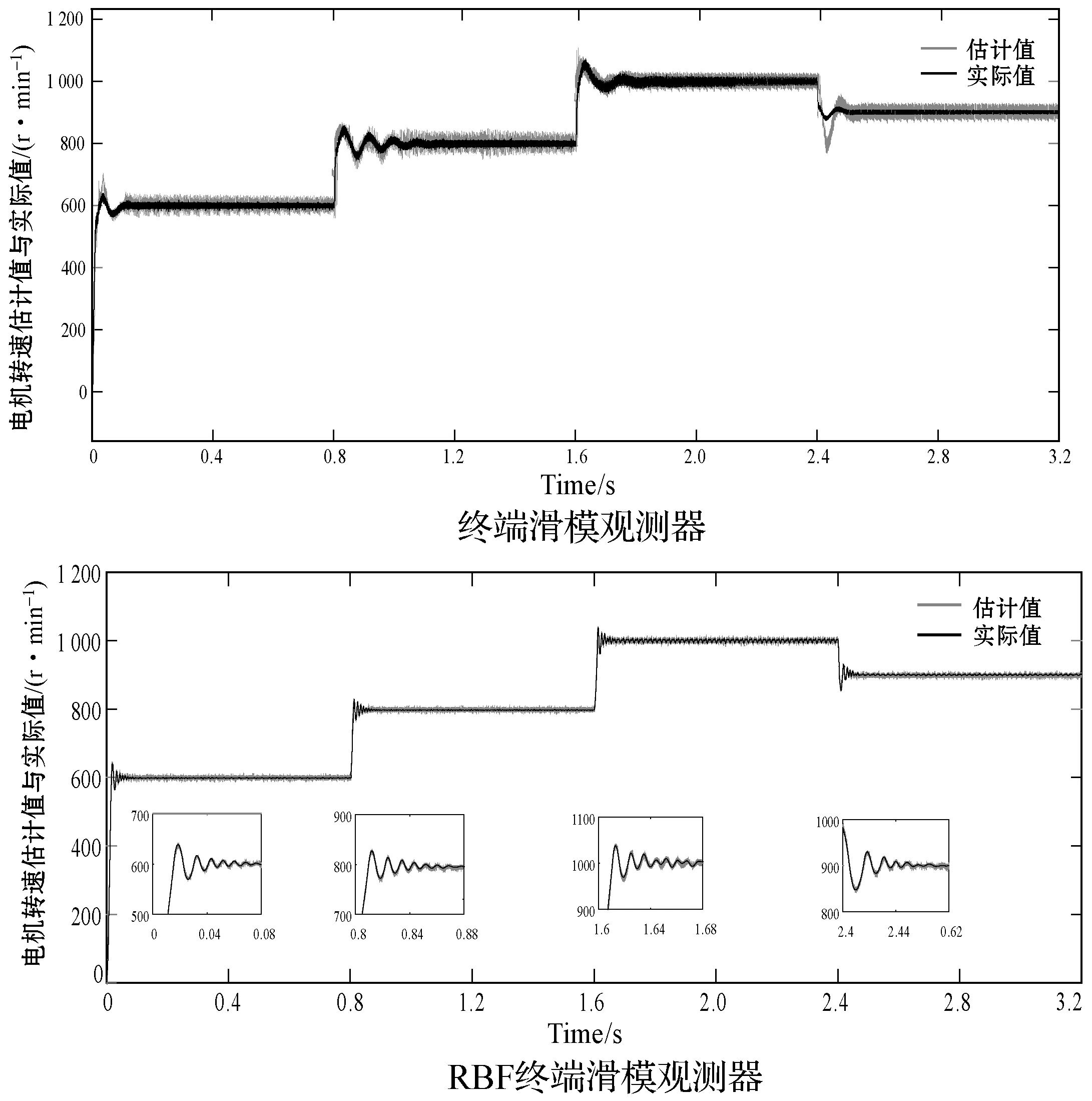
图5 转速估计值与实际值
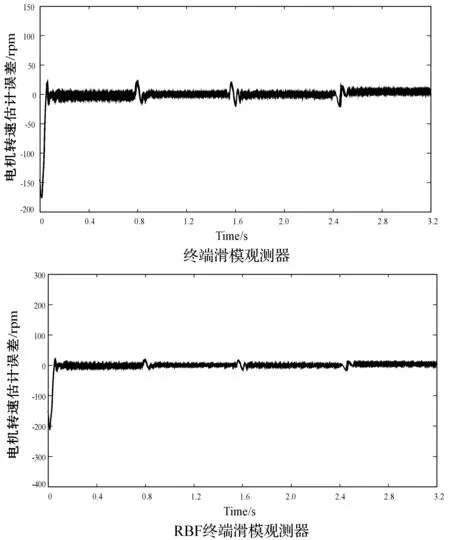
图6 转速估计误差
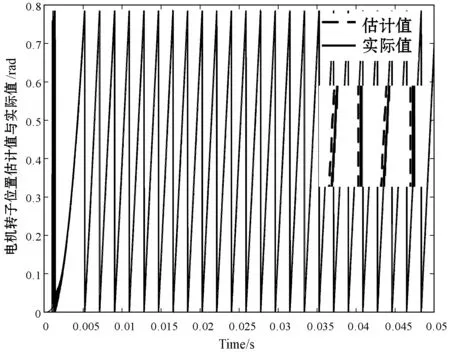
图7 RBF终端滑模观测器转子位置估计值与实际值
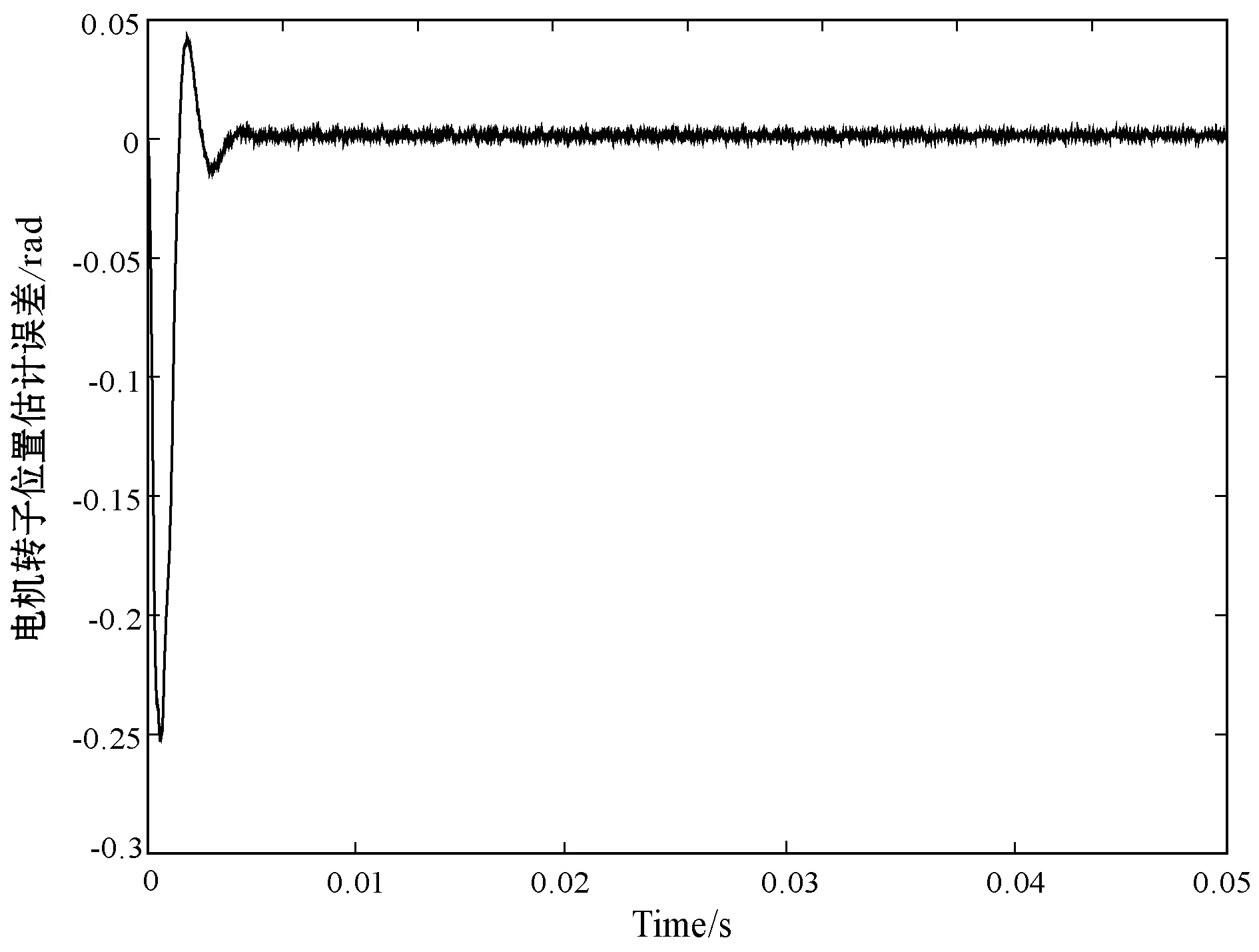
图8 RBF终端滑模观测器转子位置估计误差
图4表示电机在不同转速下的反电势估计值,可以看出RBF终端滑模观测器曲线相比终端滑模观测器曲线更加连续光滑,估计准确。
由图5和图6可看出,RBF终端滑模观测器比终端滑模观测器电机转速实现了更快速准确的调整,转速估计误差也相对较小。在0~2.4 s,电机转速逐渐增加,观测器能较好地观测速度,具备很好的动态性能;2.4~3.2 s转速下降,电机也能快速调整,观测误差较小,抖振较小,说明所设计的RBF终端滑模观测器性能较好。
由图7和图8可知,所设计的RBF神经网络终端滑模观测器可以准确检测转子位置,误差在允许范围之内。
4 结 语
本文设计了RBF神经网络终端滑模观测器,将RBF神经网络控制与终端滑模控制的优点结合起来,优化了控制信号。仿真结果表明,所设计的RBF终端滑模观测器削弱了终端滑模观测器的抖振现象,准确估计了线反电势、转速以及转子位置,满足无刷直流电机的工作要求。
猜你喜欢
火力与指挥控制(2022年6期)2022-07-25
舰船科学技术(2022年10期)2022-06-17
大电机技术(2022年2期)2022-06-05
科学技术创新(2021年35期)2022-01-14
学校教育研究(2021年20期)2021-12-14
计算机仿真(2021年3期)2021-11-17
建材发展导向(2021年14期)2021-08-23
北京航空航天大学学报(2020年10期)2020-11-14
航空发动机(2020年3期)2020-07-24
新高考·高一物理(2016年7期)2017-01-23