
星载激光通信技术研究进展
2020-01-10 01:49董全睿高世杰刘永凯张玉良
中国光学 2019年6期
董全睿,陈 涛,高世杰,刘永凯,张玉良
(1.中国科学院长春光学精密机械与物理研究所,吉林 长春 130033;2.中国科学院大学,北京 100049)
1 引 言
随着科学技术和电子器件的发展,现代社会步入了海量数据和高速传输的信息时代。目前,信息的传输可以分为有线传输和无线传输两种传输方式,有线传输方式主要适用于地面上的短距离传输,而对于地面与空间、空间与空间之间的长距离传输则需要采用无线传输方式进行通信[1-2]。目前卫星基本都利用微波进行通信,但是其波长较长、需采用较大口径天线实现高收发增益,从而导致星载平台上的微波通信终端功耗高、体积大、重量大。近几年,微小卫星发展飞速,微波通信已经不能满足星载端机轻负载、低功耗的需求[3-6]。因此,为了提高通信速率和容量,各国科研人员对无线激光通信进行了深入探索。
星载激光通信利用极窄的激光作为载体,在空间上建立星-星,星-空或星-地链路,完成数据无线传输。激光通信具有诸多优点:通信频带宽、信息容量大,抗干扰能力强,保密性极强等[7],尤其在解决射频通信瓶颈,构建天基组网等方面有很大应用潜力,此外在军事方面也有着迫切需求[8]。1994年,日本建立了世界上首个星地激光通信链路,并在此基础上完成了空间卫星ETS-VI与地面站之间的多次通信实验[9],首次验证了星地链路的可行性。在此之后,各国开始广泛开展空间激光通信研究,美国、德国和法国等国家相继进行了有关星载激光通信的研究与实验[10-13]。近几年,国外已经进行了多次成功的工程实验,对诸多关键技术进行了验证。2006年,日本又开展了星间激光通信实验,低轨卫星OICETS与欧洲研发的静止轨道卫星ARTEMIS进行了单向的激光通信测试,通信速率为50 Mbps[14]。2008年,欧洲又进一步实现了星间卫星的双向激光通信实验,TerraSAR-X卫星与美国NFIRE卫星完成了双向激光通信实验,速率为5.625 Gbps[15]。2013年,美国利用月球激光通信终端与地面站终端进行了月地超远距离激光通信,通信速率达到622 Mbps[16]。本文旨在介绍各国目前星载激光通信的研究进展及未来计划,并归纳了相关关键技术,总结了仍待解决的问题。
2 星载激光通信系统的基本构成
星载激光通信系统是一个复杂的系统,涵盖了光机电等多个领域,各子系统在完成各自任务的同时,还需相互间配合,缺一不可。激光通信系统主要包括以下几部分:激光接收和发射系统、 捕获跟踪瞄准(Acquisition Tracking Pointing,ATP)系统和光学系统,除了上述基本子系统外,还包括配电系统以及热控系统等一些配套系统。

图1 典型激光通信系统组成 Fig.1 Configuration of a typical laser communication system
星载激光通信系统设计复杂,每个子系统的具体设计要求必须要根据星载激光通信系统的需求统筹分配和严谨论证。典型激光通信系统的组成如图1所示。
2.1 激光收发系统
调制器、激光器、光学发射天线以及准直系统等共同组成激光发射系统;激光接收系统包括探测器、光滤波器、解调器和光学接收天线等。在激光发射系统中,由于半导体激光器发出的光束质量较差,通常要对光束进行整形和压缩,要求经过处理的光束近似服从高斯分布,压缩后的光束在微弧度量级。传输链路在空间的损耗大小决定了激光光源功率和发射端的天线增益。激光接收端机的主要功能是收集来自目标卫星发射过来的光束,利用分色镜从这些光束中分离出信标光和信号光,分离后的信标光经过光学系统入射到粗跟踪探测器;而信号光经过滤波和聚焦后入射到光探测器上,经由光探测器将光信号转为电信号,再经过信号处理后恢复出所需要的通讯信息或捕获跟踪信息。目前的星载激光通信系统中,信号光和信标光光源多采用800~850 nm波段的半导体激光器发射,近些年随着光纤激光器的发展,也有一些星载通信系统选用1 550 nm波段作为光源。
2.2 捕获跟踪瞄准(ATP)系统
捕获跟踪瞄准系统是用于建立和保持星地通信链路的关键系统,主要包括粗跟踪机构、精跟踪机构和预瞄准机构。在捕获阶段,粗跟踪系统处于开环状态,根据星历或卫星的运动轨迹将望远镜定位到对方终端的方向,以便捕获到信标光信号。在接收到信标光以后,粗跟踪系统会根据目标与探测器中心的脱靶量进行闭环控制,执行器件为电机。当系统光轴处于精跟踪视场范围时,系统进入精跟踪阶段,在此阶段根据精跟踪探测器反馈的误差信号控制快反镜,使误差达到通信要求的精度,一般精跟踪精度为几微弧度。预瞄准机构的作用是补偿通信双方在不同的轨道运转而引起的相对运动误差。由于激光光束的束散角很小,因此预瞄准机构十分重要。
2.3 光学系统
光学系统是通信终端的重要系统,光学系统负责准直激光发射的信标光和信号光光束并将其发向其他终端。此外,光学系统还负责接收目标终端发射过来的信号光和信标光光束。光学系统的任务是能够快速建立通信链路并且有效地进行通信。在设计光学系统时,需考虑以下几点:由于空间环境复杂,光学系统必须具有足够强的适应性;根据总体指标要求,系统结构应尽量满足体积小、质量轻的要求;大气环境会对光束传输产生影响,光学系统设计时应充分考虑大气因素并减小其影响。
3 研究现状
3.1 国外发展现状
3.1.1 日本星载激光通信技术研究现状
日本于1995年研制了激光通信终端LCE并且搭载卫星ETS-VI成功完成了世界上首次星地激光通信可行性验证。此项目完成了多次捕获试验,验证了捕获系统的性能。激光发射系统为离轴卡塞格林望远镜,直径为7.5 cm,缩放比为10倍。粗跟踪探测器采用面阵电荷耦合器件(Charge Couple Device,CCD),其视场大小为8 mrad,捕获不确定区域大小为±1.5°,跟踪精度为32 μrad,LCE终端采用四象限探测器(Quadrant Detector,QD)作为精跟踪探测器,精跟踪视场大小为0.4 mrad,跟踪精度达到2 μrad,精跟踪系统闭环带宽大于200 Hz。此外,LCE系统还设计了预瞄准装置,来补偿由于卫星相对运动产生的瞄准误差。改进后的有效补偿视场范围为±0.1 mrad,跟踪精度优于2 μrad,通信速率为1.024 Mbps,误码率低于10-6。尽管该卫星由于火箭推进失效等原因没有进入预定轨道,但是,日本通信研究实验室(Communications Research Laboratory,CRL)和美国喷气推进实验室(Jet Propulsion Laboratory,JPL)合作完成了多次捕获试验,验证了捕获系统的性能[17]。
为了继续研究激光通信链路特性,日本宇宙开发事业部( National Space Development Agency,NASDA)于2003年又开展了搭载OICETS卫星的LUCE激光通信终端项目,LUCE激光通信终端如图2所示。

图2 LUCE激光通信终端图 Fig.2 Laser communication terminal of LUCE
2005年,日本继续开展星地激光通信项目的研究,与德国共同开展了名称为“闪光卫星地面站的通信演示试验(KIODO)”的通信试验,利用搭载在OICETS卫星上的LUCE激光通信终端与德国航空航天研究院(Deutsches Zentrum für Luft- und Raumfahrt,DLR)的光学地面站进行星地间的通信实验。该项目主要验证了地面站在各种天气状况下对卫星终端的捕获能力和相互之间的通信能力。2006年,日本卫星与德国地面站之间又开展了多次捕获试验,由实验结果得出:大气湍流扰动和云层不确定因素对结果影响最大,尤其是在湍流较强时,地面站接收端的光束色散严重,使得光功率分布不均匀,进而导致整个系统通信性能变差。该实验为后续星地激光通信提供了参考,地面站可以通过选择多点布站的方式提高总通信时间。此试验项目实现了双向通信,上行、下行传输速率分别为2.048 Mbps和49.372 Mbps[18]。
2014年,日本开展了一项名为先进空间光通信技术卫星SOCRATES的计划。该计划的超小型LEO(Low Earth Orbit)激光通信终端SOTA(Small Optical TrAnsponder),总质量仅为5 kg左右,搭载在50 kg级的小卫星上与地面进行通信试验[19],SOTA终端的收发系统结构如图3所示。同年5月SOTA终端发射进入轨道,并成功于当年8月至11月间开展了星地激光通信试验,下行通信速率为10 Mbps,最远通信距离为1 000 km。
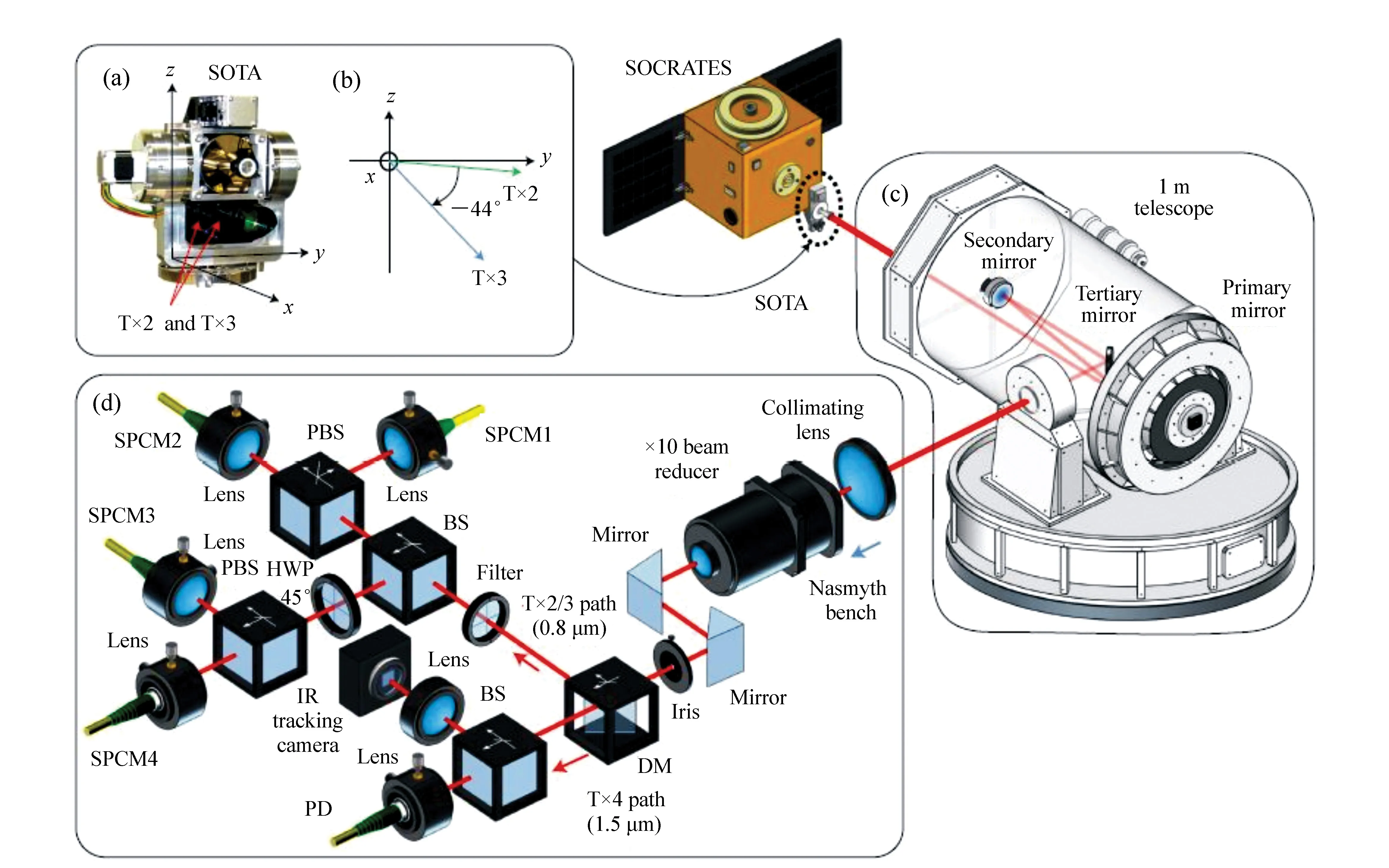
图3 SOTA收发系统结构图 Fig.3 Structure of transmitter and receiver system of SOTA
2015年1月,日本公布了包括“激光数据中继卫星(JDRS)”计划在内的国家航天开发基本计划,目前正处于初步设计研发阶段,并于当年下拨了32.08亿日元作为该计划的启动经费,计划在2019年搭载光学卫星(AOS)发射,旨在通过卫星之间的激光链路和Ka波段链路为星地终端提供数据中继服务[20]。日本已经启动下一代激光通信系统的研究,并开展了一项名为HICALI(High speed Communication with Advanced Laser Instrument)的项目计划[21]。该计划预计实现地面站与LEO之间10 Gpbs量级和与GEO(Geosynchronous Earth Orbit)之间40 Gpbs量级的激光通信,通信波长为1.5 μm,此外,该项目将使用激光通信与无线电通信的混合系统。HICALI项目在2018年已完成初步设计验证,卫星总线系统也已完成,计划于2021年搭载HST(High-throughput Satellite)卫星发射到同步地球轨道。
3.1.2 美国星载激光通信技术研究现状
美国于1995年进行星间激光通信研究并正式实施STRV-2计划,目的是验证地面与卫星之间激光通信技术的可行性。然而由于受搭载卫星轨道控制准确度差等因素影响,导致双方无法通信,最终本计划失败。随后美国的JPL实验室和美国国家航空太空总署NASA共同研究出OCD激光通信系统,先后研制了OCDⅠ样机和OCDⅡ终端,用于低轨卫星和地面站之间通信[22]。OCD终端采用带宽较高且精度高的阵列探测技术与复合轴伺服技术,简化了提前量补偿系统的功能及结构,如图4所示。通过安装高速单探测器以提高跟踪精度,同时运用开窗技术提高系统采样速率。将阵列探测系统安装在发射光路中,用来补偿粗跟踪残差(Coarse Pointing Gimbal,CPA)。在2000年的OCDⅠ样机试验中,信标光波长为780 nm,通信光波长为844 nm,通信速率为500 Mbps,ATP跟踪精度为2 μrad;在2005年的OCDⅡ终端试验中,信标光波长为810 nm,通信光波长为1 550 nm,通信速率为2.5 Gbps,ATP跟踪精度为1 μrad。

图4 OCD 系统ATP结构设计图 Fig.4 ATP structure design diagram of OCD system
2013年10月,美国麻省理工学院、林肯实验室和美国宇航局共同合作,成功开展了LLCD月球探测计划,如图5所示。在月球轨道与地球多个地面站分别进行了激光双工通信试验[23]。LLCD进行了30天,由于此系统只能在白沙地面站或ESA地面站处于使用状态时使用,因此通信时间受到一定限制,其系统链路试验时间为16小时,该演示计划的主要目的是验证关键技术和长距离激光通信的可行性,最远通信距离接近40万千米。用于LLCD激光通信的波长为1 550 nm,上行通信速率可达20 Mbps,下行通信速率可达622 Mbps,可用于对往返飞行间的时间进行连续测量,且误差低于200 ps。LLCD月球终端采用双发卡塞格林望远镜,直径为15 cm,光束发散角约为15 μrad,转台精度优于4 μrad,发射光功率为0.5 W。地面接收端机采用4发4收的光学系统,每路接收孔径为40 cm,发射孔径为15 cm,同时选择灵敏度达到-82.9 dBm的超导纳米线单光子探测器完成探测任务。

图5 LLCD月球探测示意图 Fig.5 Schematic diagram of LLCD lunar exploration
为了建设深空探测通信网络以及为未来的TDRS空间激光通信网络建设提供重要参考,美国在2017年开展了名为“激光通信中继演示(LCRD)”计划[24]。此计划用于对地面接收站与地球同步轨道卫星间高速双向通信进行演示,并利用GEO卫星与地面上两个接收站进行激光中继通信。在LLCD的基础上,LCRD计划完成验证编码演示,组网能力有所提高,可满足DTN网络协议等任务。LCRD计划在商用卫星SSL(Space Systems Loral)上装载卫星激光通信终端。同时,改建了麻省理工学院和JPL的两个地面光学站,在原来地面站的基础上增加了DPSK单元和AO自适应光学系统,用来进行DPSK通信试验同时可提高其抗大气湍流干扰能力。图6为LCRD自适应系统结构图。

图6 LCRD自适应光学系统结构图 Fig.6 Structural diagram of adaptive optical system of LCRD
此外,基于LLCD项目的成功经验,美国于2017年又开展了深空光通信计划(Deep Space Optical Communications,DSOC),DSOC计划可以实现近地小行星和木星间的数据传输,本计划回传数据速率为250 Mbps,通信距离最长达6.3亿公里,功率为76 W,终端质量仅为28 kg。但是与LLCD相比,DSOC还有许多关键技术仍未解决,如千瓦级地面发射功率、下行光束较大预瞄准角、通信终端光子计数阵列探测器以及惯性稳定光束指向等。最近的DSOC研究得到美国空间通信与导航中心SCaN计划的支持,将继续进行微小卫星研究,终端总体重量在6 kg以内,电源功率小于50 W,计划与火星航天器之间的数据通信速率达20 Mbps,与地面站之间的数据通信速率达200 kbps[25]。2018年8月2日,美国又完成了一项星载激光通信领域里程碑的事件:美国的OSCD-B和OSCD-C终端分别搭载两颗1.5U(1U指一个标准单元,体积为10 cm×10 cm×10 cm)的立方卫星AeroCube-7B和AeroCube-7C,首次完成了基于Cubesat微小卫星平台的星地激光通信,两个通信终端的质量仅为360 g,下行通信速率为100 Mbps。
3.1.3 欧洲星载激光通信技术研究现状
1977年,欧洲航天局(European Space Agency,ESA)在空间激光通信领域开展研究,并于1985年制定和实施包含一个LEO卫星(SPOT-4)激光通信端机与一个GEO卫星(ARTEMIS)激光通信端机在内的SILEX计划,于2001年发射卫星ARTEMIS,其工作波段为847 nm,接收速率为50 Mbps,天线口径为25 cm,最远通信距离为45 000 km,LEO至GEO的通信速率为50 Mbps,GEO至LEO的通信速率为2 Mbps,并在2001年11月法国地面观测卫星SPOT-4与ESA的ARTEMIS卫星第一次实现星间激光通信单向试验,其仅能从SPOT-4单方向传递数据至ARTEMIS。这是世界上首个成功实现星间激光通信的链路计划,具有标志性意义[26]。实现SILEX计划的空间终端接收天线采用卡塞格林式天线结构,使用非相干调制通信方式,通信波长为797~853 nm。此次星间通信时间为900 s,通信速率为50 Mbps,误码率为10-9。
2002年,德国航天中心DLR开展了LCTSX计划,Tesat公司承担了设计及制造通信终端的任务,该计划于2007年6月15日搭载TerraSAR-X卫星发射。TerraSAR-X卫星于次年3月与美国的NFIRE卫星成功建立了双向超高速激光通信链路,星间通信速率为5.6 Gbit/s,通信距离为5 000 km。LCTSX计划实现星间激光通信的同时,也可用于完成星地激光通信[27]。与以往采用传统微波通信的方式相比,该计划首次在星间激光通信运用相干通信方式,体现了激光通信高速率的优势,具有标志性的意义。
2008年底,ESA计划将空间激光通信应用于新的数据中继卫星系统EDRS(European Data Relays System)中[28]。EDRS计划作为全球第一个正式投入使用的空间激光通信项目,最初的目的是利用多条Ka波段GEO对地链路和中继GEO卫星与LEO间激光通信链路,解决传统低轨卫星在对地面数据传输方面的缺陷。EDRS计划创造出一种新型卫星服务,使空间激光通信系统发展与应用趋于成熟,加速了商业模式的运营进程。2016年6月1日ESA对外公布了第一张使用EDRS-A转发哨兵1号卫星拍摄的法国留尼旺岛图像,如图7所示,其图像传输速率为600 Mbps。ESA计划一共发射3颗EDRS卫星,构成全球组网计划,可实现全球数据的中继传输,2018年计划发射EDRS-C卫星,在此基础上预计于2020年或2021年扩充发射EDRS-D卫星。

图7 EDRS传回的图像 Fig.7 Image transmitted from EDRS
近些年为满足卫星新兴市场的需求,增强组网化能力,2018年瑞士军工企业RUAG发射了一颗名为OPTEL-μ的微小卫星激光通信终端到近地轨道,该终端总重8 kg,体积为8L,功耗为45 W,能够以2 Gpbs的速率将LEO产生的数据传输至地面站,OPTEL-μ终端实现了从近地轨道到固定光学地面站组网的双向非对称激光通信链路[29]。该项目计划在全球网络的4到10个不同站点位置部署地面站,以满足天气晴朗状况下的通信需求。目前欧洲航天局ESA已经开展深空探测激光通信的研究,项目名称为小行星撞击任务AIM(Asteroid Impact Mission),目的是为了保护地球遭到小行星碰撞,并计划于2020年将其发射进入双体小行星轨道[30]。AIM主体航天器计划携带至少3颗较小的飞行器:即由DLR提供的Mascot-2小行星着陆器,以及两颗或更多的Cubesat微小卫星,AIM将在深空测试卫星间的激光通信,这将是未来探索深空的必要技术。
3.2 星载激光通信国内发展现状
国内开展空间激光通信的研究较晚,但考虑到激光通信领域巨大的发展前景,近几年国家加大了对该领域的投入。目前国内许多科研机构和高校都开展了相关技术的研究并取得了显著的成果。电子科技大学对激光通信系统理论及系统设计进行了较为深入的探索[31]。长春理工大学在空地以及空空激光通信方面进行了许多研究试验,2013年成功完成了两架运12飞机相隔144 km的远距离通信[32]。哈尔滨工业大学则将研究重心主要放在星间及星地激光通信方面,2011年,哈尔滨工业大学建立了国内首个星地通信链路,其自主研制的激光通信终端搭载LEO卫星“海洋二号”成功发射[33]。成都光电所将自适应光学技术应用到激光通信系统中[34],以有效校正大气湍流及其他因素引起的波前畸变,提高了通信质量。此外,中国科学院长春光学精密机械与物理研究所、上海技术物理研究所、中国航天科技集团有限公司等单位也相继开展了空间激光通信研究[35]。目前,我国自行研制的北斗卫星导航系统已初具规模,其中北斗三号卫星也增加了卫星激光通信功能[36]。虽然我国在空间激光通信领域取得了一定的成果,但是离商用化的目标还有很长的一段路要走,仍然有很大的发展空间。
4 星载激光通信发展趋势及关键技术研究展望
4.1 星载激光通信发展趋势
近几年星载激光通信技术发展迅速,关键技术不断被攻破,纵观国内外星载激光通信的研究进展,呈现以下发展趋势:
一是高速率。经过几十年的发展,高灵敏度探测技术逐渐成熟,误码率越来越低,可使速率从最初的百Mbps量级提高到Gbps量级,甚至达几百Gbps量级;
二是星载激光通信呈现组网化趋势。最初的星载激光通信方式基本上均为点对点通信,但近几年各个国家不断开展星载数据中继卫星计划,组网化已经成为未来的主要发展趋势。
三是星载端机小型化。轻量化、小型化、低功率的终端越来越受到国内外激光通信项目的青睐,小型化的终端一般发射到低轨轨道上,例如日本的SOTA终端,美国的立方卫星AeroCube-7B和AeroCube-7C和欧洲的OPTEL-μ微小卫星。
四是星载激光通信深空化研究。美国已于2017年又开展了深空光通信计划DSOC,用于实现木星、火星探测信息传输。而欧洲航天局也已经开展了名为AIM的深空探测任务,用于记录小行星的轨道信息,防止小行星与地球发生碰撞。
4.2 关键技术研究展望
4.2.1 光学系统设计研究
高效的光学天线和精密的收发光路是光学系统的主要设计目标。为了减小通信终端的体积,光学天线通常采用收发共用的结构,光学天线一方面对发射光束进行准直扩束,压缩发散角,提高发射增益;另一方面对其他终端发射过来的光束进行压缩,使其最终聚焦在光电探测器上。天线孔径大小与发射和接收增益成正比,但随着孔径的增大,终端的体积和重量也会随之增大,因此天线孔径的大小应该根据总体设计要求,全面考虑各方面因素来确定。典型的空间激光通信收发光路包括信标光和信号光两个通道,成像质量直接影响跟瞄精度和通信质量。此外,光学系统各个分系统的指标分配和参数选择也直接影响整个系统的性能指标。
4.2.2 高精度ATP控制系统研究
ATP控制系统是用来建立和保持空间激光通信链路的关键技术。在相距较远的动目标上对发散角小的窄信号光进行捕获、跟踪、瞄准是件十分困难的事情。目前,典型的ATP系统一般采用复合轴控制,包括粗跟踪系统和精跟踪系统两个部分。粗跟踪系统带宽低但是动态范围大,用于完成扫描、跟踪以及大范围视场跟踪;精跟踪系统带宽高但视场小,可有效补偿粗跟踪系统的残余误差,此外,精跟踪系统对高频扰动也有较强的抑制能力,整个ATP系统的精度取决于精跟踪系统的控制精度。粗跟踪系统的设计难点是在低速高精度的工作模式下要克服转台的轴系摩擦还要补偿电机齿槽力矩波动,目前可以通过在数字控制器上设计先进控制算法来克服扰动,以提高精度或者改进机械加工技术,从而减小轴系间的摩擦。而精跟踪系统则需要克服由星上振动引起的高频干扰,精跟踪系统的带宽要足够高,一般为粗跟踪系统带宽的十倍左右,因此用于精跟踪系统的光电探测器的采样频率要很高,目前精跟踪系统常用的光电探测器主要是以下3种:电耦合器件、位置敏感器、四象限探测器。
4.2.3 大气信道对通信链路的影响研究
大气信道对激光通信链路有影响,这是制约空间激光通信发展的重要因素之一,也是发展空间激光通信技术必须考虑的因素。由于大气处于不同的运动状态,会引起温度、压强、密度等因素的随机变化,造成大气湍流运动,大气湍流会对光束传播和波面产生影响,进而对通信链路的捕获、跟踪和稳定造成不利影响,严重时可导致通信失败。利用液晶光束衰减器可提高宽范围激光的光强稳定性,增强光强闪烁的抑制能力。此外,采用自适应光学技术可有效缓解大气信道对传输光路产生的波前动态误差。
4.2.4 环境适应性和可靠性研究
空间复杂环境对激光通信的影响十分严重,空间影响因素主要包括空间温度、空间辐射和空间等离子体运动等。空间环境对激光通信系统中的许多载荷都有不同程度的影响,从而引起了许多航天科研工作者的重视。因此在设计光学系统时,采用抗辐射的高反膜反射镜;设计机械器件时,选择不易冷焊的材料,并镀上不易冷焊的涂层;电力系统尽量选择抗辐射能力强和抗氧化的电力电子器件,并做好防静电设计等。
5 结束语
随着近几年材料技术、探测技术、半导体发光技术以及控制技术的快速发展以及国内外对星载激光通信系统研究的逐步深入,星载激光通信已经进入性能测试阶段,朝着实用化和商业化的目标更进一步。目前,星载激光通信的研究正向着更高通信速率、更远通信距离、更小型化的方向发展,很多国家正在全面构建激光通信组网。结合各国目前的研究热点,小卫星激光通信终端将在未来中占据重要地位,如何在设计的过程中使整个系统小型化、轻量化、一体化将显得尤为重要。我国近几年在星载激光通信方面的投入逐年递增,已经由关键技术研究、地面实验进入到空间试验阶段,为实现天地一体化的激光通信网络奠定了坚实的基础。
猜你喜欢
北京航空航天大学学报(2021年9期)2021-11-02
移动通信(2021年5期)2021-10-25
中学生数理化·高一版(2021年3期)2021-06-09
现代装饰(2020年8期)2020-08-24
中学生数理化·高一版(2020年6期)2020-07-25
空间科学学报(2020年3期)2020-07-24
铁道通信信号(2019年9期)2019-11-25
科技创新导报(2016年27期)2017-03-14
销售与市场·渠道版(2017年2期)2017-03-09
中国交通信息化(2014年3期)2014-06-05
