
不对称全桥飞跨电容型MMC在船舶推进电机中的应用
2020-01-10 01:55郭燚赵怡波赵燃
中国舰船研究 2019年6期
郭燚,赵怡波,赵燃
上海海事大学物流工程学院,上海201306
0 引 言
随着舰船功率密度的不断增加,中压直流(Medium Voltage DC,MVDC)电力系统的研究应用也日益广泛[1]。文献[2]提出了一种能效高、体积小的环形MVDC 电力系统模型,即全船由4 台大功率发电机供电,并以环形直流母线为主要传输路径,连接推进系统、储能系统及各类负载,从而实现全船能量的统一管理。其中,电力推进系统变频器的拓扑结构对全船电力系统可行性的影响很大,与传统的多电平变频器相比,模块化多电平变换器(Modular Multilevel Converter,MMC)因其模块化和可拓展性的特点,以及较低的开关频率和良好的谐波性能等优势,已成为中高压调速系统的研究热点[3-4]。
目前,MMC 已广泛应用于陆上高压直流输电系统和船舶中压直流系统[5-6]。Spichartz 等[7]分析了MMC 在船舶电力推进系统中的应用现状,详细介绍了西门子3.9 MW,4.16 kV 三相电机的17 电平MMC 驱动器,并研究了子模块电容的低频段电压波动问题。低频段电容电压波动的解决方案较多,其中高频注入法的应用最为广泛,王泽等[8]进行了原理分析,Korn 等[9]介绍了ABB 公司首次利用高频注入法解决该问题的处理过程,将高频正弦电流注入各相桥臂环流并将高频共模电压注入每相输出端口,即可得到显著的抑制效果。于洋等[10]将高频正弦电流和电压改为高频方波分量的形式注入,有效降低了器件的电流应力。Okazaki 等[11]将不同的波形进行组合,对比分析了不同注入方式的特点。虽然高频注入法可以有效抑制子模块电容电压的波动问题,但高频共模电压将严重影响电机绕组绝缘的寿命,对电机造成负面影响[12-13]。
针对高频共模电压问题和MMC 子模块电容的低频段电压波动问题,本文拟提出一种适用于船舶电力推进系统的不对称全桥飞跨电容型拓扑结构,并设计相应的调速系统和螺旋桨模型;通过Matlab/Simulink 仿真,分析船舶中压电力系统的分级正车启动工况,以验证电容电压纹波抑制方案的可行性。
1 主电路拓扑
1.1 模型介绍
中压直流电力系统环形模型的体积较小,具有良好的故障处理能力和高效的连续供电能力。本文将提出以MMC 作为整流逆变环节的船舶中压直流环形电网模型,如图1 所示。2 台主发电机和2 台辅助发电机经MMC 整流向中压直流母线供电,再通过MMC 变频来驱动左、右舷推进电机;通过采用分区配电的方式,向船艏至船艉3 个区域的负载中心和雷达负载供电。

图1 船舶中压直流环网Fig.1 Ship medium voltage DC ring network
1.2 拓扑结构

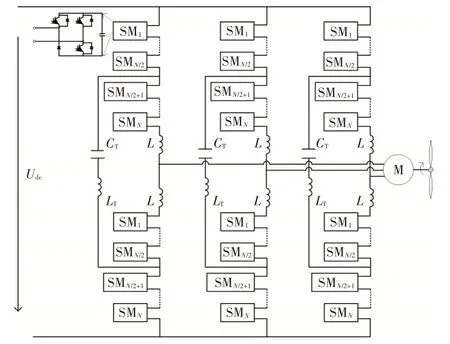
图2 不对称全桥飞跨电容型MMC 的主电路拓扑Fig.2 Main circuit topology of asymmetric full-bridge flying-capacitor MMC

图3 不对称全桥拓扑Fig.3 Asymmetric full-bridge circuit topology
2 电容电压的波动问题和解决方案
2.1 原理分析
基于MMC 的推进电机在低频模式下运行时,将出现中性点电压偏移,从而造成子模块电容电压波动,其根本原因是桥臂间能量波动所导致的桥臂能量不均衡。由于MMC 为三相对称性结构,故以a 相桥臂为例,分析电容电压波动的原理。图4 所示为MMC 单相桥臂的等效电路图,其中:Udc为直流母线电压;ua,p,ua,n和ia,p,ia,n分别为上、下桥臂的等效电压和等效电流;uva,iva分别为a 相交流侧的输出电压和输出电流,其表达式为

式中:Uma为相电压幅值;Ima为相电流幅值;ω为基波角频率;t 为时间;θa为相位角;φ为功率因数角。
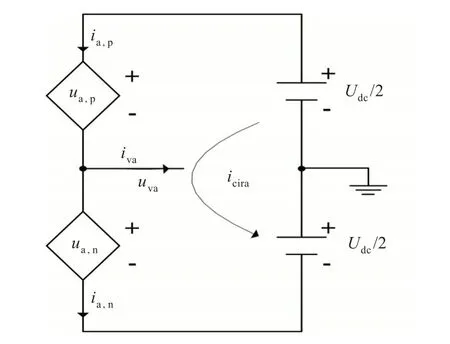
图4 MMC 单相桥臂的等效电路Fig.4 Equivalent circuit of MMC monophase bridge arm
忽略桥臂的电感电压,得

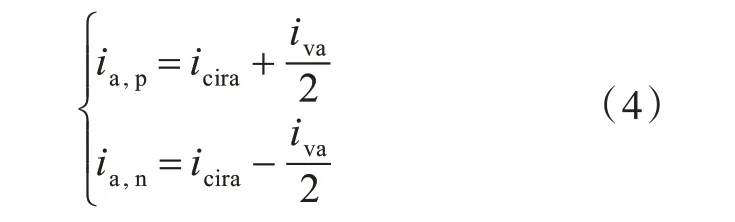
根据交流、直流两侧能量交换,可以计算调制比k和环流icira,即

则上、下桥臂的电流为
根据式(2)~式(4),上、下桥臂的瞬时功率Pa,p和Pa,n为
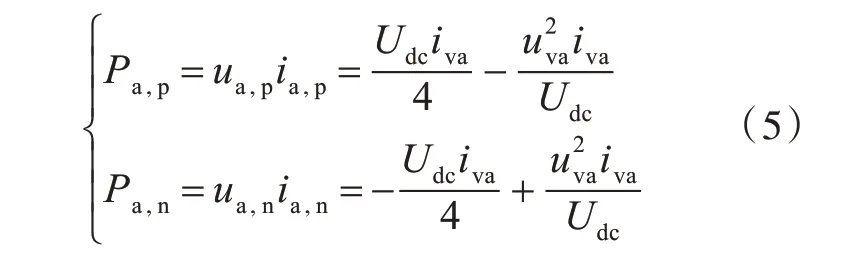
MMC 在低频模式下的uva较小,故式(5)中最右侧对桥臂能量的影响较小,可以忽略不计[15-16]。将式(1)代入式(5),得

对式(6)进行积分,则上、下桥臂的能量Wa,p和Wa,n为
由式(7)可知,上、下桥臂的能量呈周期性波动,所以半个周期(0~π)的能量变化为

由于桥臂的能量变化与子模块电容的储存能量有关,所以式(8)可以采用子模块电容的能量变化进行计算,即

式中:C 为子模块电容的电容值;UpC,a和UnC,a分别为a 相上、下桥臂子模块电容的电压值。
根据式(8)和式(9),得
由式(10)可知,子模块电容的电压波动与交流侧输出电流幅值成正比,与输出电流频率成反比,与子模块电容成反比。在实际运行过程中,MMC 交流侧的输出电流幅值基本保持不变,子模块电容值也保持不变,而在低频工况下,将导致子模块电容电压的严重波动。
2.2 电容电压的波动抑制
基于图5 所示的高频电流通道回路,可以平衡上、下桥臂能量,从而解决电容电压的波动问题。图5 中,上、下桥臂分别均等分为2 个半桥臂,且以2 个中点为节点,并联 一个LC 谐振电路。交流侧输出电压uva不变,而高频电压uh,a则由于能量通道的缘故,在上、下桥臂各自的半桥臂上相互抵消,即上、下桥臂之间的高频电压为零,导致没有共模电压输出至交流侧,故中性点电压不会发生偏移。基于通道回路,高频注入电流ih,a可以重新分配并平衡上、下桥臂的能量,从而减小电容电压的波动幅值。
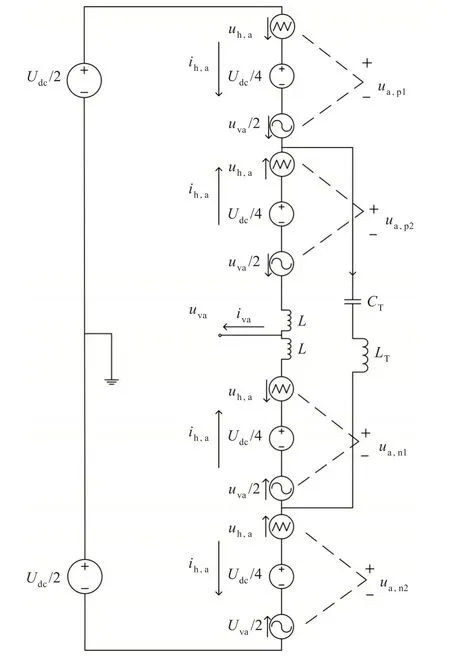
图5 MMC 单相桥臂高频能量注入的等效电路Fig.5 Equivalent circuit of high frequency energy injection of MMC monophase bridge arm
图5 中,4 个 半 桥 臂 的 电 压(ua,p1,ua,p2,ua,n1,ua,n2)和电流(ia,p1,ia,p2,ia,n1,ia,n2)为

根据式(3)、式(11)和式(12),可知上、下桥臂的瞬时功率为

式中:p0为桥臂瞬时功率中的低频分量;ph为高频分量。

当负载为推进电机时,式(14)中的ω为电机定子角频率,θa为定子电压相角。由于低频分量将引起电容电压波动,故可通过注入高频电流的方式进行改善。
2.3 改进型方波形式注入
根据不同的环流注入方式,MMC 的具体损耗也有所不同。相比于正弦波形式注入,方波形式注入可以降低50%左右的桥臂电流幅值,从而减小器件损耗[17]。由于船舶推进电机的启动时间较长,所以应选择损耗相对较小的注入波形。
高频方波的电压形式为:
式中:Uh,a为高频方波的共模电压幅值;fh为注入方波的频率。
由于船舶电压的等级较低,MMC 电平数较少,故宜采用载波移相调制方式。为了避免过调制[18],其注入方波的共模电压幅值应满足:

即
式中,kmax为额定频率fp.u所对应的调制比。为了满足MMC 的动态响应及子模块冗余要求,kmax一般取值为0.8~0.9。
本文采用永磁同步电机,故调速方式为恒压频比,得:
式中,ωp.u为额定角频率。
通过uh,a和ih,a注入的高频能量,即可补偿低频功率p0:

根据式(17)~式(19),高频注入电流ih,a的计算公式为
由式(20)可知,随着电机转速的增加,高频电压uh,a将逐渐趋于0,而高频电流ih,a则会趋于无穷大,这将严重破坏整个推进系统的平衡,导致其无法运行。此外,随着电机转速的提高,子模块电容电压的波动将逐渐减小,故可设置截止频率fs,当系统频率达到截止频率时,即可停止注入高频能量,不仅有利于系统恢复稳定,也可以减小系统损耗和功率器件的电流应力。
MMC 在低频模式下的运行频率为0~25 Hz,可以根据实际工况设置截止频率。在实船运行过程中,高频环流将引入损耗;当频率升高时,子模块电容电压的波动将逐渐减小,故可以相应减少所注入的高频能量。因此,本文将在高频电流中引入增益系数,所注入的高频电流将随着频率增加而逐渐减小。当达到截止频率时,高频电流为0;当超过截止频率时,则停止注入高频电流。
于是可将式(20)改写为

式中,ωs=2πfs,为截止角频率。
2.4 飞跨电容和频率取值
图2 中飞跨电容所在的回路为LC 谐振电路,当达到谐振频率fT时,回路阻抗最小。因此,高频注入电流的频率fh应尽量接近谐振频率fT,低于系统开关频率fc,且高于电机额定频率f,即
式中:LT,CT分别为谐振电路的电感值和电容值。
根据控制器频率对船舶输出谐波特性的影响规律,本文选取2 000 Hz 作为系统的开关频率。另外,由于本文船舶推进电机达到额定转速时的工作频率不超过30 Hz,故取截止频率fs=18 Hz。根据式(22),可以将高频电流频率取值为120 Hz。
根据(22)式,得

由式(23)可知,电容值的选取与高频电流频率和电感值有关。如果电流频率过高,则对开关器件的要求较高且损耗较大,考虑实船应用中的电感/电容体积、价格等因素,本文取值CT=580 mF,LT=3 mH。
3 控制策略与船桨数学模型
3.1 控制策略
本文的应用场景为船舶中压电力推进系统,其中推进电机为功率密度较高的永磁同步电机,螺旋桨为定距桨。图6 所示为系统的控制框图,由于船舶子模块的数量较少,所以PWM 控制采用了载波移相调制方式。根据推进电机和船舶模型提供的电机转速ω和相对航行速度VP,螺旋桨向电机提供负载转矩TP,电机则通过矢量控制产生有功和无功参考电流,经输出电流环控制获得三相参考电压ux-ref(x=a,b,c)。其中,电容电压均衡控制包括桥臂电容电压平均控制和子模块电容电压均衡控制。通过桥臂环流控制,即可获得含有高频成分的环流参考值,从而抑制子模块的电容电压波动。

图6 系统控制框图Fig.6 System control block diagram
图7(a)所示为桥臂电容电压的平均控制框图,每相子模块的电容电压平均值控制跟踪参考电压。当两者出现差值时,即可通过环流反馈值icri,x跟踪,从而减小差值。最后,通过PI调节器得出修正量ΔUarm,x,其中:

式中:i=1,2,…,2N,为子模块电容的数量;UCi,x为每个子模块电容的电压。
图7(b)所示为子模块电容电压的均衡控制框图,UCi,x通过PI 调节器跟随参考电压,其中ΔUx,j,i为控制修 正量,其值 与上、下桥臂的电流ix,j(j=p,n)相关。
图7(c)所示为桥臂环流控制框图,将PI 控制器 输 出 的 环 流 参 考 值与 高 频 电 流ih,x进 行 叠加,然后与环流反馈值icri,x比较,最后经PI 调节得到修正量ΔUdiff,x。其中:

图7(d)所示为电机矢量控制和输出电流控制框图。对比额定转速ω*和电机实际转速ω,经PI 调节器获得有功参考电流iq_ref。令id_ref=0,输出电流id和iq经PI 调节,即可获得d,q 轴参考电压。通过采集电机提供的转子角度q,并经反派克变换,即可获得三相参考电压ux,ref。
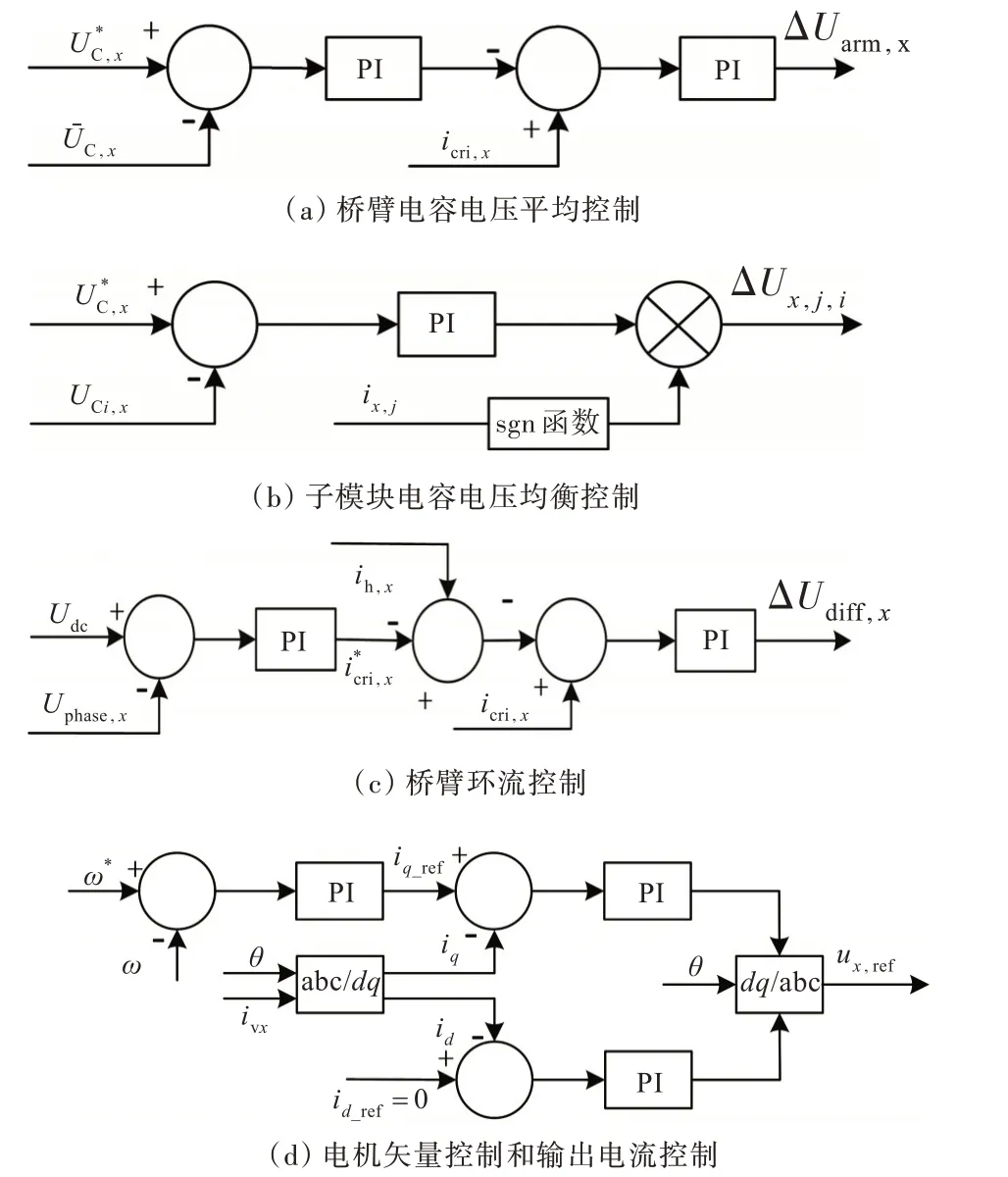
图7 控制框图Fig.7 Control block diagram
3.2 船桨数学模型
根据文献[19-20],搭建船桨数学模型,具体参数如下:船舶质量14 290 t,桨径7.01 m,螺距比0.965,盘面比0.8,海水密度1 025 kg/m3,最高航速15.4 m/s,船舶附着水质量占船舶质量的15%,正航阻力系数22 099,倒航阻力系数413 533。考虑仿真精度和时间要求,根据文献[21]的附表1 和附表2,本文将通过8 阶Chebyshev 多项式特性拟合得到螺旋桨的转矩特性系数和推力特性系数,进而得到螺旋桨转矩。
4 仿真分析
4.1 仿真建模
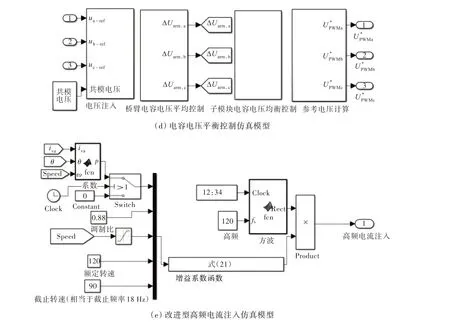
图8 船舶中压推进系统仿真模型Fig.8 Simulation model of marine MVDC propulsion system
基于Matlab/Simulink 仿真平台,本文搭建了以不对称全桥飞跨电容型MMC 为变频器的船舶中压推进系统仿真模型,如图8 所示。图中:为a 相PWM 参考电 压;b为b 相PWM参考电压;为c 相PWM 参考电压。图8(a)为整体仿真模型示意图,包括船舶中压直流电力推进系统模型和控制系统模型,其中12 kV 直流母线采用了理想直流源,电机采用了ABB 公司的6 kV/36 MW 永磁同步推进电机,具体参数如表1和表2 所示。图8(b)所示为不对称全桥飞跨电容型MMC 仿真模型,其拓扑结构参见图2。由于船舶中压推进系统的电压等级不高,同时考虑到MMC 的谐波问题,故选择了额定容量为40 MVA,每相子模块数量为20 的MMC 变频器。图8(c)所示为船舶仿真模型(参见3.2 节),可以较好地模拟船舶实际运行状态。图8(d)所示为电容电压平衡控制仿真模型(参见3.1 节)。图8(e)所示为环流控制模型中的改进型高频电流注入仿真模型,其考虑了高频方波电流和增益系数。

表1 MMC 的仿真参数Table 1 Simulation parameters of MMC
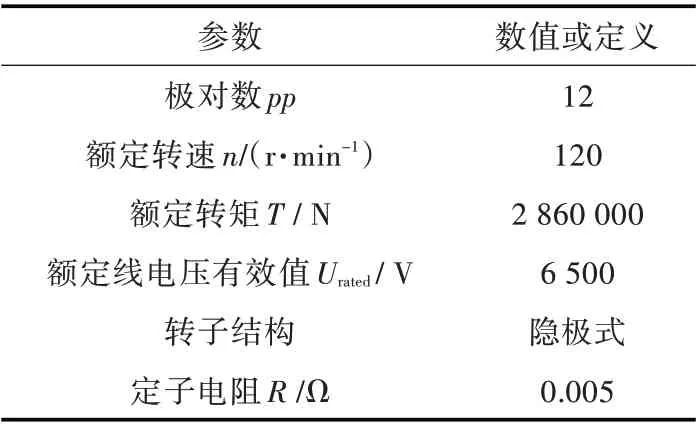
表2 永磁同步电机的仿真参数Table 2 Simulation parameters of permanent magnet synchronous motor
4.2 电容电压波动抑制
为验证本文方案的可行性,在推进电机恒转矩启动过程中(即低频工况下),施加电容电压波动抑制算法。图9 所示为电容电压波动抑制的仿真结果,电机频率由0 上升至12 Hz,在第1 s 时施加抑制算法,即注入高频电流。图9(a)为电机定子电流波形图,图9(b)为高频注入电流波形图。图9(c)为电容电压波形图,由图9(c)可知,施加抑制算法之后,电容电压波动的百分比由18%降至6%,说明该方案可以有效抑制低频段电容电压波动。图9(d)为上、下桥臂的电流,图9(e)为系统共模电压,由图9(e)可知,没有共模电压注入系统输出端,这说明该方案可以有效解决传统高频注入法导致的共模电压过大的问题。其中,图9(e)所示的共模电压波动是调制策略所致,其幅值相对较小。
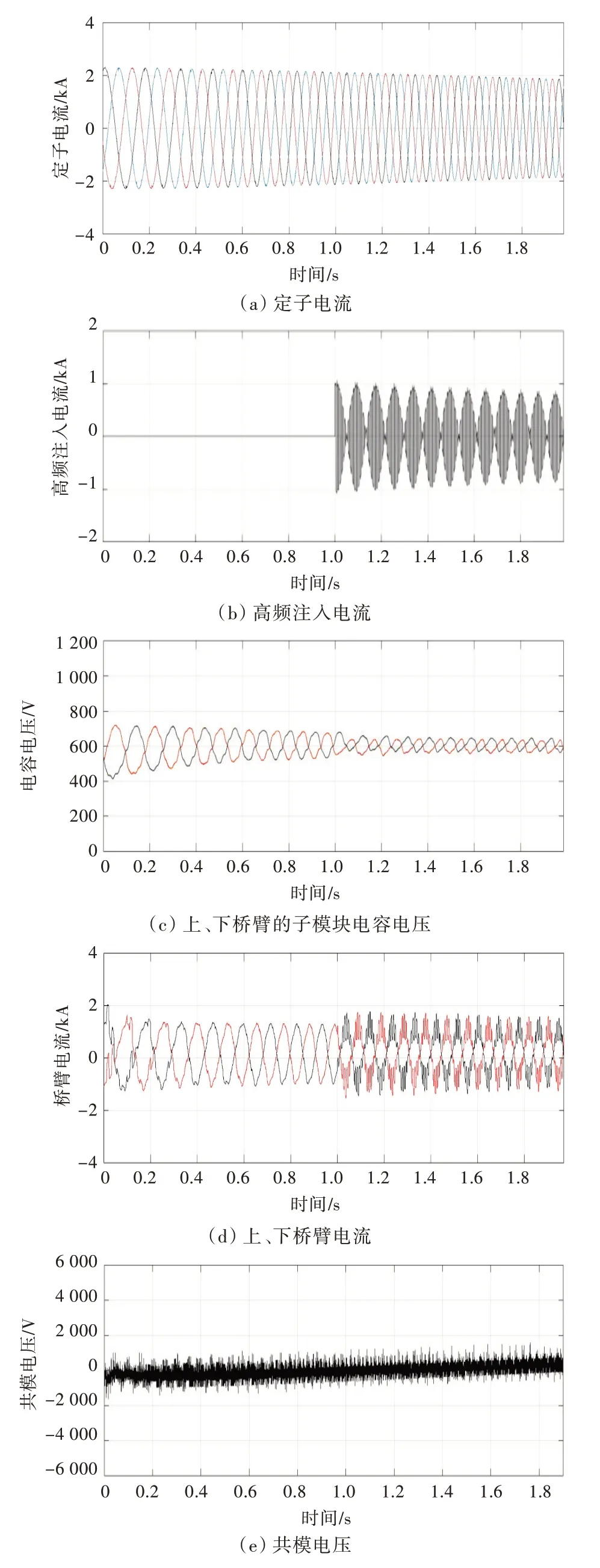
图9 电容电压波动抑制的仿真结果Fig.9 Simulation result of capacitive voltage fluctuation suppression
4.3 推进电机分级启动
由于船舶推进电机的功率较大,如果螺旋桨负载直接起动,将导致负载转矩存在较大的尖峰,所以船舶推进电机一般采用分级启动模式,其仿真结果如图10 所示。由图10(a)可以看出:推进电机在第3 s 达到1/2 额定转速,完成了分级启动的第1 阶段;在第10 s 达到额定转速,完成了分级启动。由图10(b)可以看出,定子电流的幅值和频率随着电机转速的增加而增大。图10(c)所示为高频能量通道的高频注入电流,在第4 s 左右停止高频电流的注入,此时系统频率为截止频率18 Hz。图10(d)所示为分级启动第1 阶段的高频电流细节放大图,由于本文设置了增益系数,故随着系统频率的增加,高频电流幅值逐渐减小。由图10(e)和图10(f)可知:由于高频注入电流逐渐减小,所以桥臂电流的高频成分也相应减小;当第4 s 停止高频电流注入时,桥臂电流幅值也随之降低。由图10(g)可知,在整个启动阶段,子模块电容电压的波动率小于8%,这说明该方案能够有效抑制低频阶段的电容电压波动。

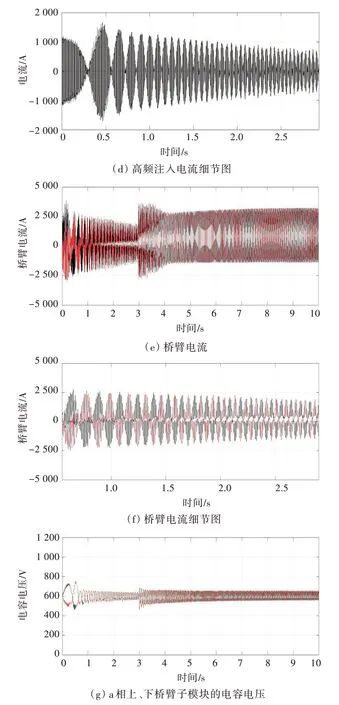
图10 电机分级启动的仿真结果Fig.10 Simulation results of motor stepwise start
5 结 语
本文设计了一种不对称全桥飞跨电容型MMC,可以作为变频器应用于船舶中压直流电力推进系统,从而解决船舶推进电机在低频工况下的电容电压波动问题。在此基础上,与传统的高频注入法相比,此方案解决了传统注入法所带来的共模电压过大的问题。子模块采用不对称全桥型拓扑,相比于全桥型子模块,减少了电力电子器件使用频率,且具有直流故障阻断能力。本文分析了低频工况下电容电压波动的机理,通过将方波与设置截止频率的环流注入法相结合,减少了电子元器件的电流应力和损耗。基于Matlab/Simulink 仿真平台,搭建了带有螺旋桨负载的6 kV/36 MW 永磁同步推进电机模型,模拟了推进电机分级启动过程,仿真结果表明:该方案可以将低频段的电容电压波动百分比由16%降至8%以内,验证了本文方案的可行性和有效性。
本文虽然解决了传统高频注入法所致的共模电压过大的问题,但由于开关动作和电容电压波动等因素,仍然存在较小的共模电压,后续将基于传统MMC 逆变器和常规负载,研究解决该问题。
猜你喜欢
电源学报(2022年1期)2022-02-25
汽车电器(2021年12期)2021-12-30
防爆电机(2021年3期)2021-07-21
今日农业(2021年5期)2021-05-22
地震研究(2021年1期)2021-04-13
安徽科技(2021年3期)2021-04-06
小资CHIC!ELEGANCE(2018年24期)2018-08-13
知识就是力量(2016年6期)2016-05-31
中学生数理化·高二版(2016年5期)2016-05-14
中学生数理化·高二版(2008年11期)2008-06-17
