融合背景差分法和帧间差分法的运动目标检测
2020-01-10 12:43陈媛胡娜余秋月
现代计算机 2019年34期
陈媛,胡娜,余秋月
(武汉科技大学城市学院机电工程学部,武汉430083)
0 引言
现今社会人口密度越来越大,社会关系日益复杂,各种异常突发事件时有发生,从安防角度考虑,不管是企业、商场、学校还是小区都设置有视频监控。运动目标的检测是视频监控系统逐步信息化和智能化的关键技术之一,在当今热门的计算机视觉领域占有一席之位,相关的基础研究开展得也比较多,具有广阔的应用前景[1]。
运动目标检测是通过应用计算机图像处理方面的知识,将运动目标从视频图像的背景中分割出来。应用于目标检测的方法大致可以分为三类:背景差分法、帧间差分法和光流法。背景差分法是将待测帧图像与背景图像做差,然后二值化提取前景目标。该方法的关键是要建立合适的背景模型,对光照和环境的影响敏感[2]。帧间差法也是用图像做差来检测运动目标,所选取的图像一般是连续的或相隔的几帧图像。该方法原理简单,运算方便,但是检测出的目标物常常轮廓不连续,内部会出现“空洞”[3]。光流法是通过引入速度矢量的概念,分析图像像素点的速度矢量来进行运动目标检测的一种方法[4]。由于要分析各个像素点速度矢量,因此计算耗时,实时性差。本文提出一种改进的背景差分和帧间差分相结合的运动目标检测算法,能较好地解决背景差分法对光照突变的敏感和帧间差法检测的目标物轮廓不完整的问题,具有一定的鲁棒性。
1 背景差分法
1.1 基本原理
背景差分法是将待测帧图像与背景图像做差,然后二值化提取前景目标。用公式描述如下:
式(1)中fi(x,y)为待测帧图像,Bi(x,y)为背景图像,Di(x,y)为两者的差分结果。式(2)中,通常根据经验选择恰当的阈值T,对差分图像Di(x,y)做二值化处理,得到二值化图像Ri(x,y)。当Di(x,y)≥T时,二值化结果为1,该像素位置判定为运动目标区域;当Di(x,y)<T时,二值化结果为0,则该像素位置判定为背景。
1.2 改进的均值法背景建模
背景建模是背景差分法的关键步骤,常见的背景建模法有均值法、中值法、单高斯法以及混合高斯法等。本文采用方便快捷的均值法进行背景建模。考虑到现实场景的光照突变影响,引入光照补偿模型进行均值法建模,具体过程如下:
第一步,将一段时间内采集到的多帧序列图像进行相加再平均,将其作为初始化光照补偿模型,记为P(x,y)。
第二步,将待测帧图像分别与P(x,y)相加再平均,公式如下:

式(2)中,i=1,…,N,Ii(x,y)表示待检测的第i帧序列图像,Fi(x,y)表示经过光照补偿后的第i帧序列图像。
第三步,将光照补偿后的新视频序列进行均值建模[5],公式如下:

式(4)中B(x,y)表示背景图像,N表示平均帧数。
完成以上步骤后,再将待测帧图像与得到的背景图像做差,然后对差分后的图像进行二值化处理。
2 帧间差分法
帧间差法是选取连续的或相隔的几帧图像做差分运算来检测运动目标。本文选取相连的三帧图像进行检测研究。
2.1 三帧差分法的原理
三帧差分法是选取连续的三帧图像进行差分,其算法思想如下[6]。
(1)选取连续的三帧图像Ii-1(x,y),Ii(x,y),Ii+1(x,y),进行差分运算:

(2)根据经验选取适当的阈值T进行二值化:
(3)进行逻辑“与”操作:

2.2 改进的三帧差分法
在上述第二步选取的阈值是根据经验选取的,通常是一个固定值,这会使得检测的结果有一定的误差,对于环境变化的适应性较差。灵活的选取阈值也成为准确检测运动目标的一个关键因素。本文在传统三帧差分法的分析基础上,通过最大模糊熵法则确定最优阈值,以进一步提高检测运动目标的准确性。
Fig. 8 illustrates a scanning electron microscopy (SEM)image of ZnS films deposited on a Si substrate (100) by 200 W RF sputtering. This image shows that our thin ZnS layer has a smooth and homogeneous surface, and reveals small grains of average size less than 50 nm.
设差分图像X的灰度级为L,大小为M×N,用xmn表示像素点(m,n)的灰度值。将差分图像划分为目标(bright)和背景(dark)两个模糊集,它们的隶属度函数分别定义如下:
式中,[a,b]为模糊区间,[0,a]和[b,L-1]为非模糊区间。μbright(xmn)表示像素点,(m,n)属于目标的程度,μdark(xmn)表示像素点(m,n)属于背景的程度,且μbright(xmn)+μdark(xmn)=1。当xmn=(a+b)/2时,表明像素点(m,n)属于目标和背景的程度均为 0.5,则可选xmn=(a+b)/2为分割阈值。
灰度级小于(a+b)/2的像素属于背景区域,灰度级大于(a+b)/2的像素属于目标区域。
图像的模糊熵为:

其中:

一个事件的熵越大,则事件本身越真实。那么,如果图像的熵越大,则目标和背景的区分程度就越好。由此可得最优的模糊参数aopt和bopt,以及最优阈值(aopt+bopt)/2。
改进后的三帧差分算法流程图如图1所示。
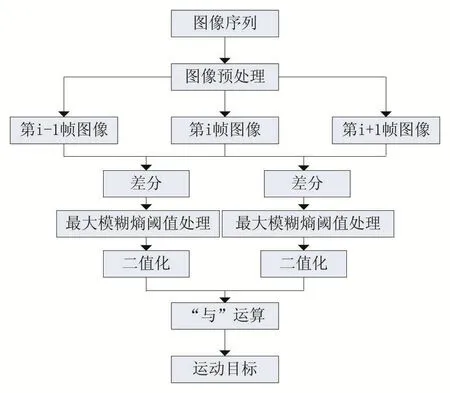
图1 改进三帧差分算法的流程图
3 算法融合
将以上改进的背景差分法和改进的三帧差分法相结合,得到本文提出的融合背景差分和帧间差分的运动目标检测算法,其算法流程图如图2所示。

图2 本文算法流程图
4 实验结果与分析
为了验证本文算法的有效性,实验选取某小区进出口的监控视频,视频帧尺寸大小为352×240。本文的仿真实验是在OpenCV软件完成,电脑配置为Intel Core i5-5200 CPU,2.20 GHz,内存为 12GB,Microsoft Windows 7操作系统。本文分别使用改进的背景差分法、改进的帧间差分法和两者融合的算法进行实验,仿真结果如图3所示。

图3 实验仿真结果
图3 (a)是原始帧图像,图3(b)是采用光照补偿模型的均值背景建模的背景差分法检测的结果,图3(c)是采用最大模糊熵阈值分割的三帧差分法检测的结果,图3(d)是本文提出的将两种算法相融合的检测结果。由图可知,本文所采用的融合改进的背景差分和改进的帧间差分算法检测出的运动目标更加清晰准确,进一步提高了检测的有效性。
5 结语
本文首先介绍了背景差分的基本原理,在建立背景图像的过程中,提出采用带光照补偿模型的均值法建模进行算法改进;然后介绍了帧间差分法中的三帧差分法,提出采用最大模糊熵阈值进行图像的二值化处理;最后将两种改进的算法进行相融,提出了改进的背景差分和帧间差分相融合的运动目标检测算法,在一定程度上克服了传统的背景差分和帧间差分的缺点,能较好地检测出运动目标,具有一定的鲁棒性。
猜你喜欢
上海师范大学学报·自然科学版(2022年3期)2022-07-11
重庆大学学报(2022年2期)2022-02-28
数理化解题研究·综合版(2021年11期)2021-12-22
建材发展导向(2021年19期)2021-12-06
计算机仿真(2021年6期)2021-11-17
小学教学研究(2021年5期)2021-09-29
扬州大学学报(自然科学版)(2021年6期)2021-02-14
中学生数理化(高中版.高考理化)(2020年11期)2020-12-14
智能计算机与应用(2020年4期)2020-08-31
初中生世界·九年级(2020年2期)2020-04-10